4.1. Establishment of Numerical Simulation Model
In this study, we constructed a three-hole three-dimensional numerical simulation model with consistent model dimensions, material constitutive properties, charging methods, charge lengths, stemming lengths, boundary conditions, and mesh precision. By varying the detonation time of the explosives within the holes, a numerical simulation of pre-splitting blasting was conducted by using different inter-hole delay times.
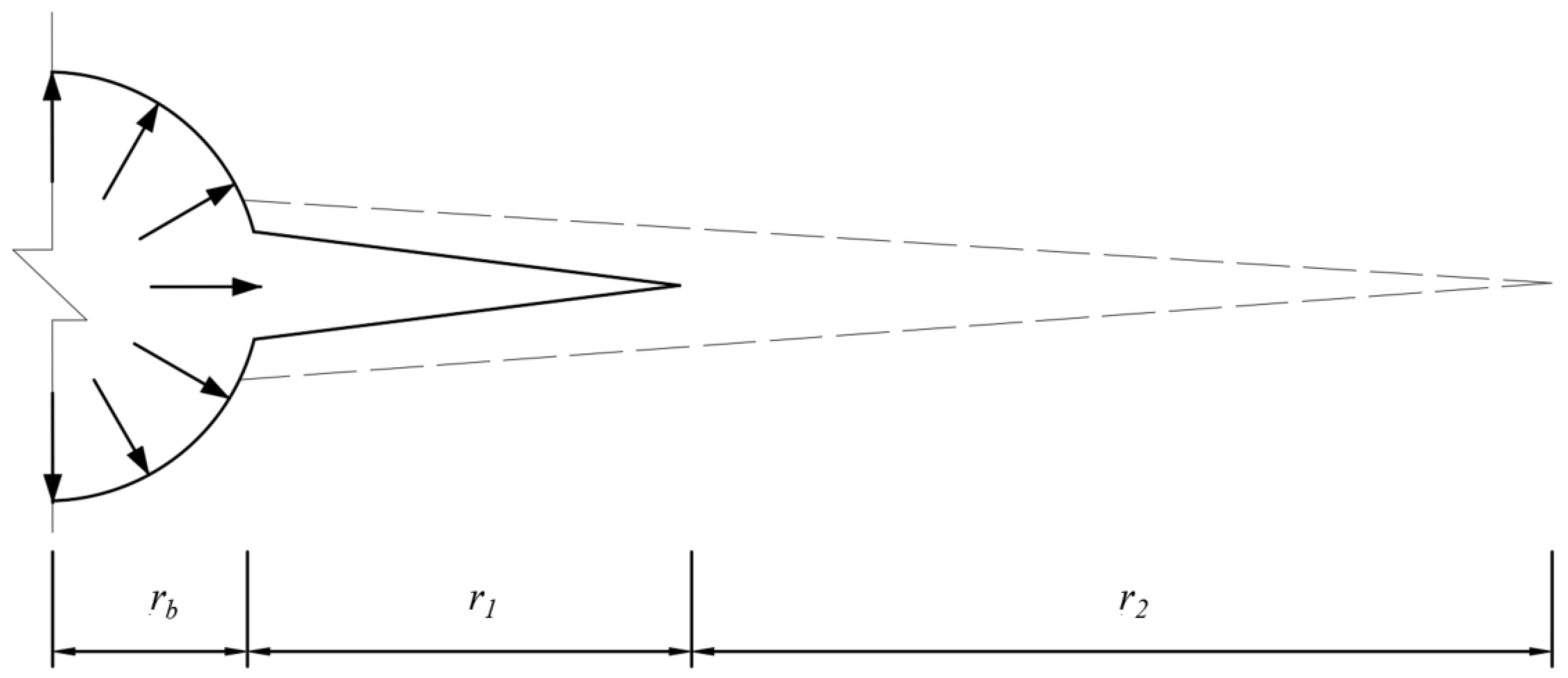
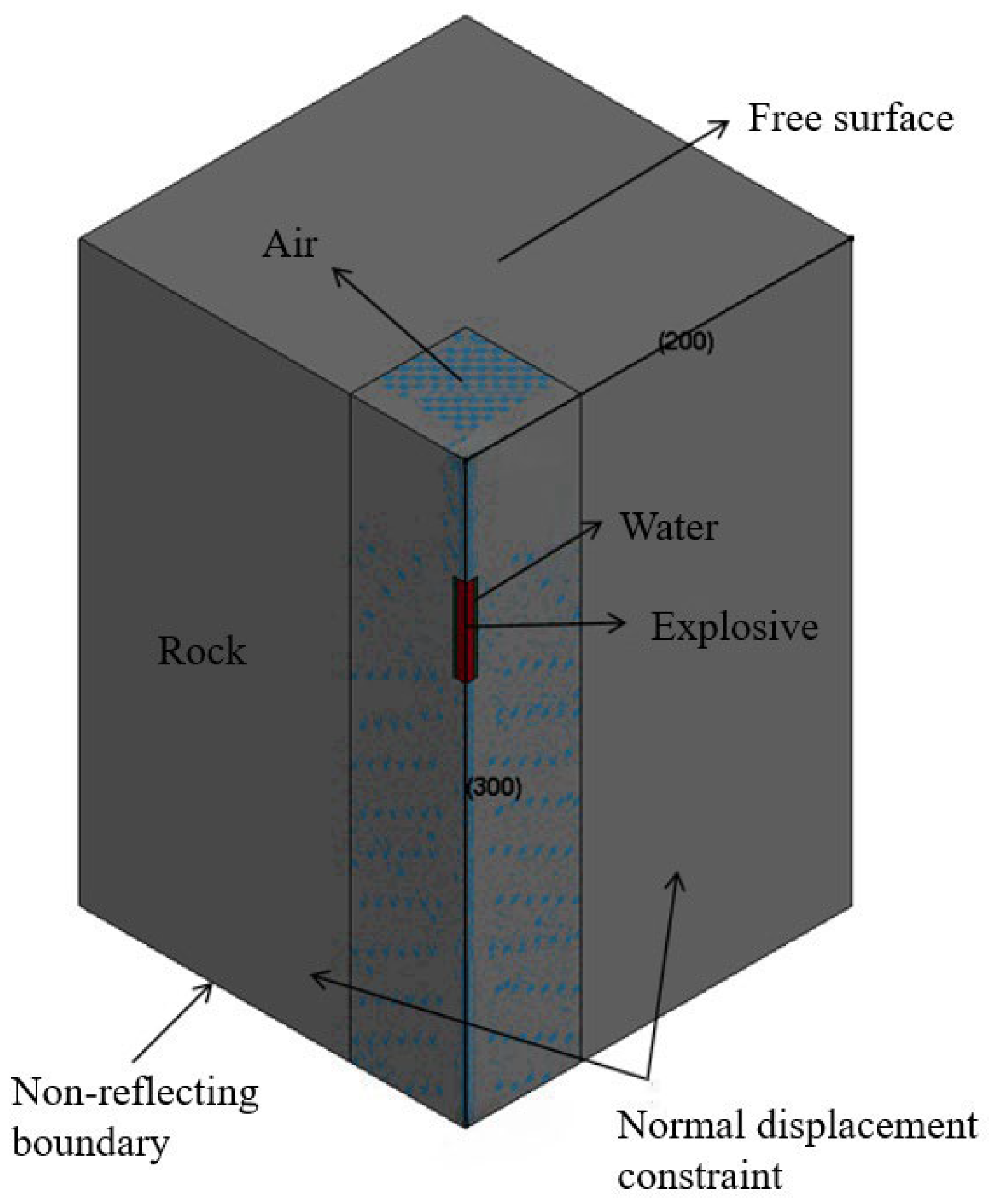
The three-hole three-dimensional numerical simulation model had dimensions of 640 cm × 400 cm × 500 cm. The drill bit used in the mining site had a diameter of 120 mm; thus, the hole diameter was determined to be 120 mm. Based on the research conclusions and recommendations of other researchers [
35] regarding pre-splitting blasting with a radial decoupling charging factor of 2 to 4 and a hole spacing of 8 to 12 times the hole diameter, combined with engineering practices and the researchers’ experience of mining site, a radial decoupling charging factor of 3.75 was ultimately determined (with the decoupling zone filled with water medium), and the hole spacing was set at 120 cm. The charge length was set at 4 m, and the stemming length was set at 1 m; detonation occurs at the bottom of the hole. The explosive used was No. 2 rock emulsion explosive, and the stemming material was the same as the rock material. The specific blasting parameters for the numerical simulation of sequential pre-splitting blasting are shown in
Table 8.
To closely align with real-world conditions, non-reflecting boundary conditions were set around the perimeter and bottom of the model to simulate an infinite rock domain, while the top surface of the model was left without specific boundary conditions, defaulting to a free surface. The numerical simulation algorithm employed a fluid–structure interaction (FSI) approach, where the rock, as a structural component, was modeled using the Lagrangian algorithm, and water, air, and explosives, as fluids, were modeled using the Arbitrary Lagrangian–Eulerian (ALE) algorithm. Additionally, a certain flow space was designated as the coupling domain.
In a study on pre-splitting blasting, Wang et al. [
36] found that sequential hole detonation with a delay time of 12 ms results in a higher half-hole rate for the pre-split holes. Hu [
37] conducted model tests using high-speed photography and concluded that the complete formation of pre-split cracks takes approximately 18 ms. Lou et al. [
38] proposed a theoretical model for selecting the delay time in millisecond blasting and verified it through field tests, suggesting an optimal inter-hole delay time of 24 ms.
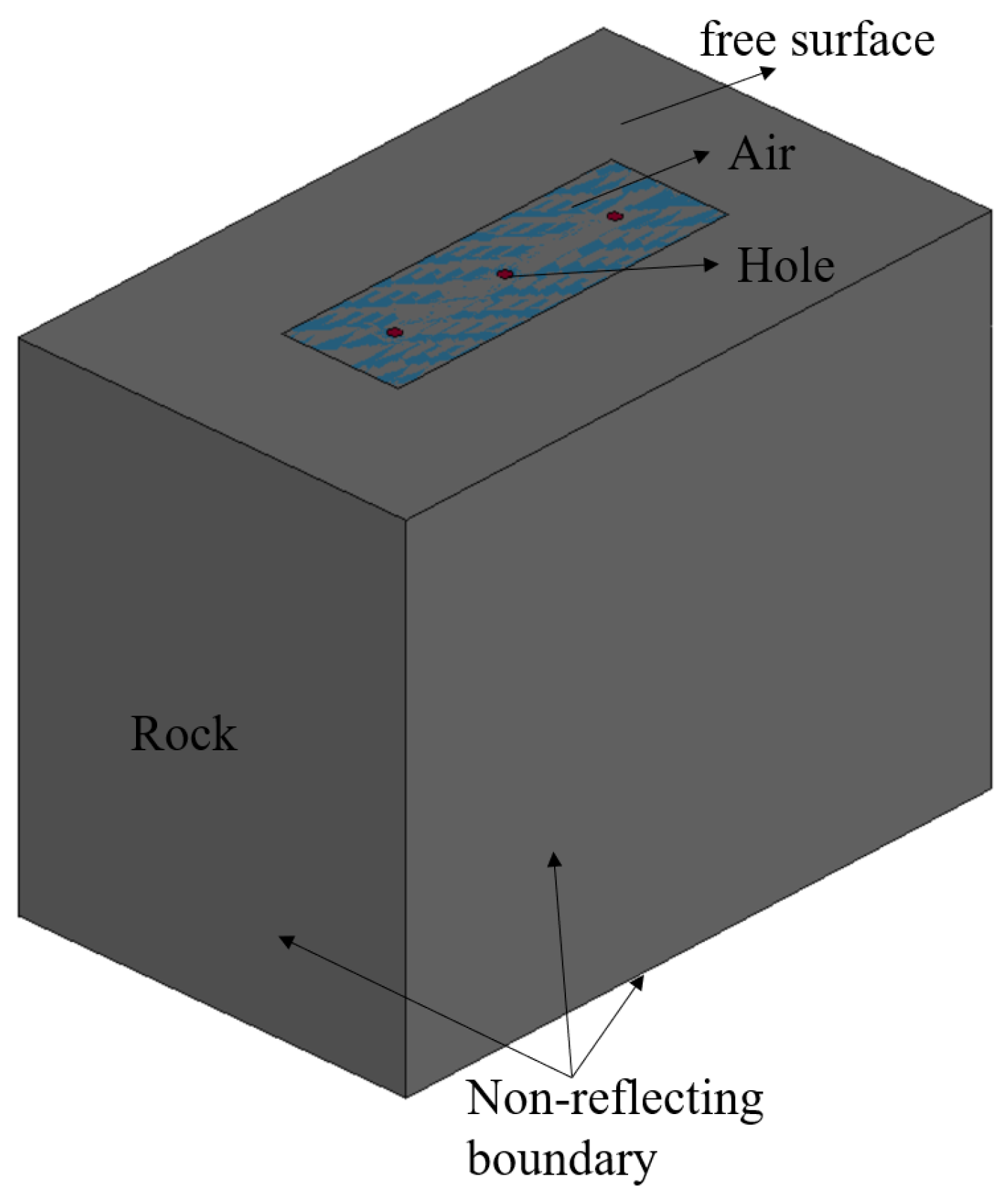
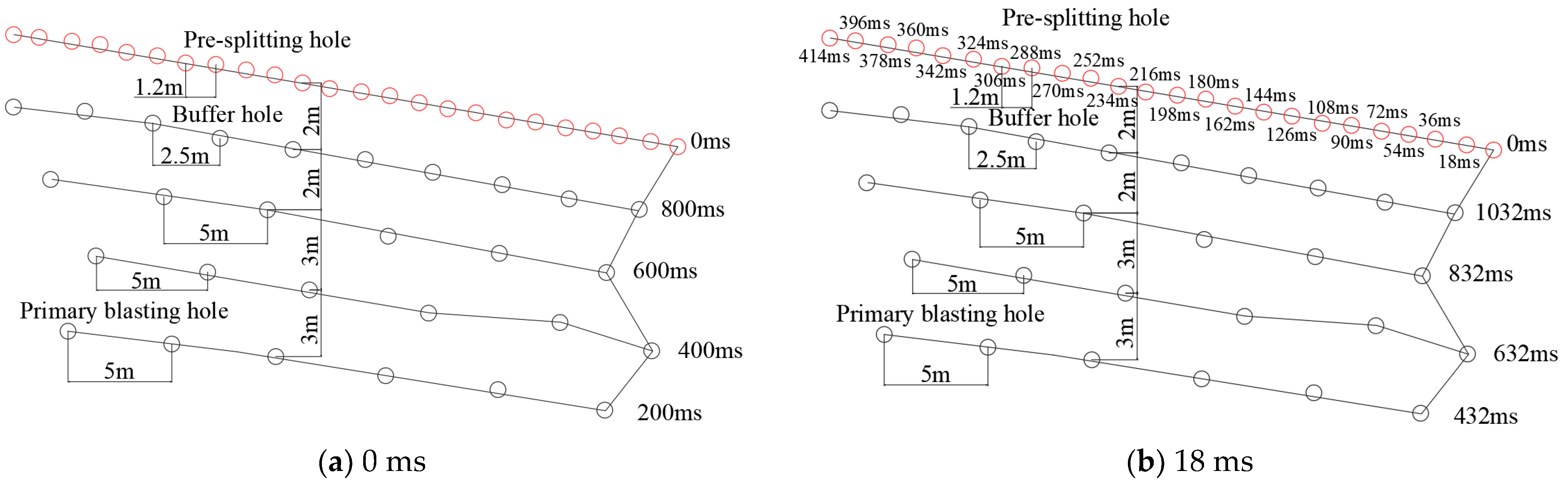
Therefore, four three-hole three-dimensional simulation models were constructed. The detonation of the explosives was defined using the keyword *INITIAL_DETONATION in LS-DYNA’s detonation point definition function. The delay detonation times for the blast holes were set at 0 ms (simultaneous detonation), 12 ms, 18 ms, and 24 ms, respectively. The specific numerical simulation models are shown in
Figure 8.
4.2. Analysis of Rock Damage Law
Blasting operations for rock excavation, while enhancing the efficiency and quality of construction, inevitably cause some degree of damage to the retained rock mass due to explosive detonation. Pre-splitting blasting technology can significantly reduce the damage caused to the retained rock mass during detonation in the main blasting zone, yet the damage caused by pre-splitting blasting itself cannot be overlooked. The damage to the rock mass observed on its surface does not reveal the specific depth of the damage, and thus it is often neglected. However, the damaged rock mass, when subjected to excavation disturbances from other areas, vibrations from passing trucks, rainfall, and other factors, can become increasingly unstable. This instability may lead to phenomena such as collapses and landslides, which can affect the progress of construction and pose threats to the safety of construction personnel.
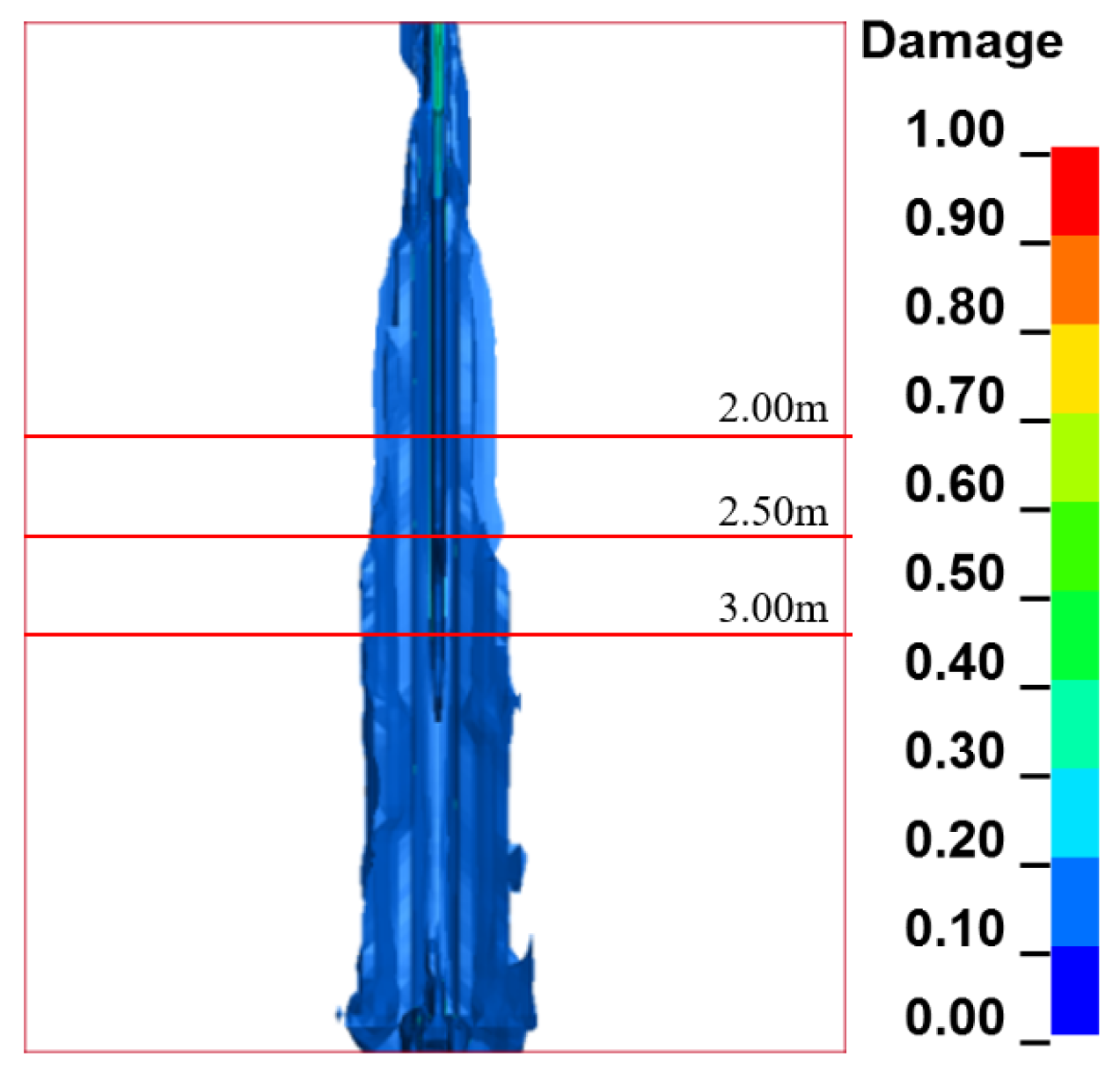
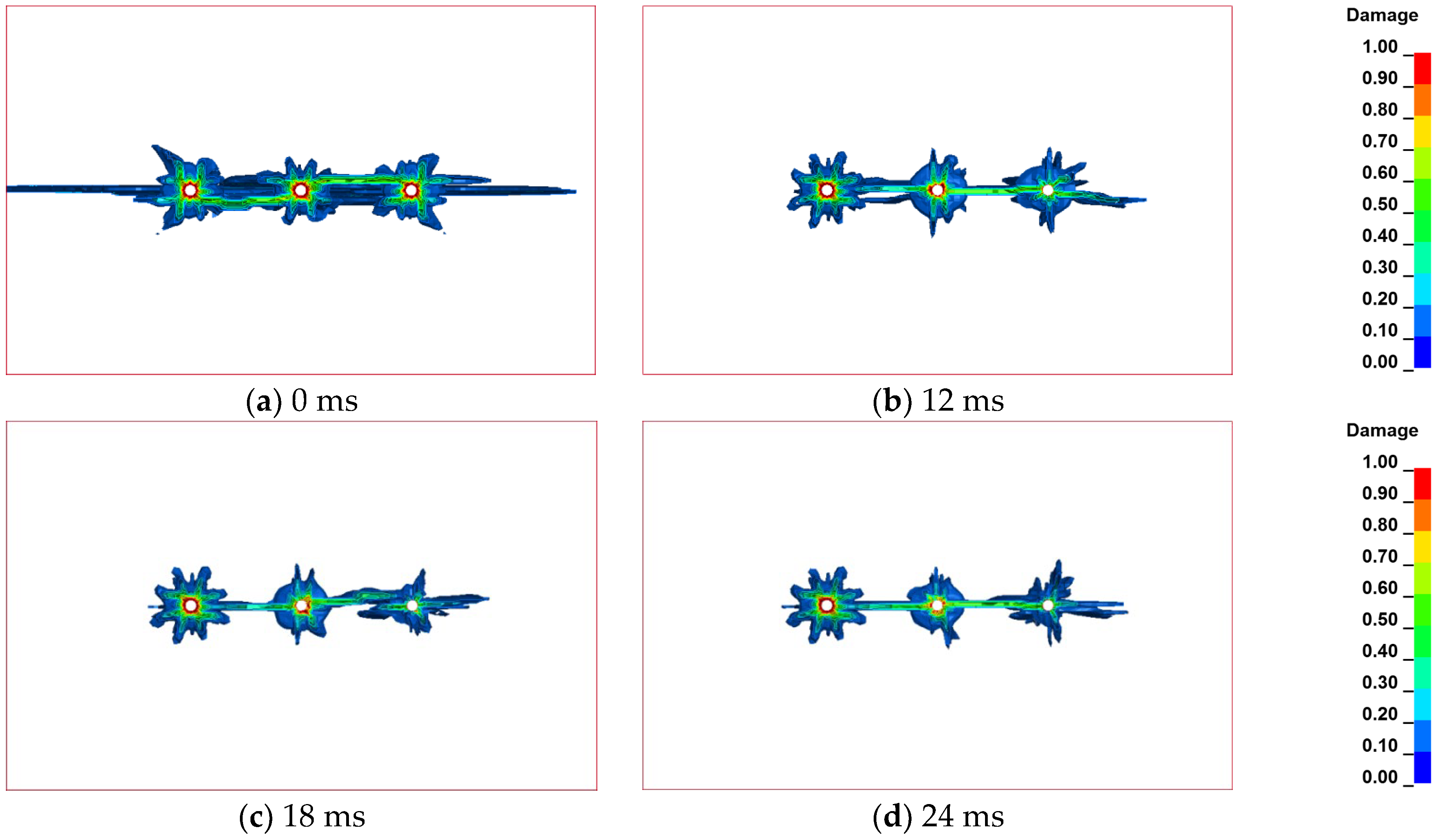
To investigate the damage depth under various conditions in this study, cross-sectional views of the damaged areas are taken, and the depth of the damaged regions is measured. Measurements are conducted at three vertical depths: 2 m, 2.5 m, and 3 m. Multiple measurements are performed, with three data points collected for each depth (at the same measurement locations across all models). Ultimately, the average of the nine data points is taken, and half of this average is used for comparison. The process of measuring the damage depth is illustrated in
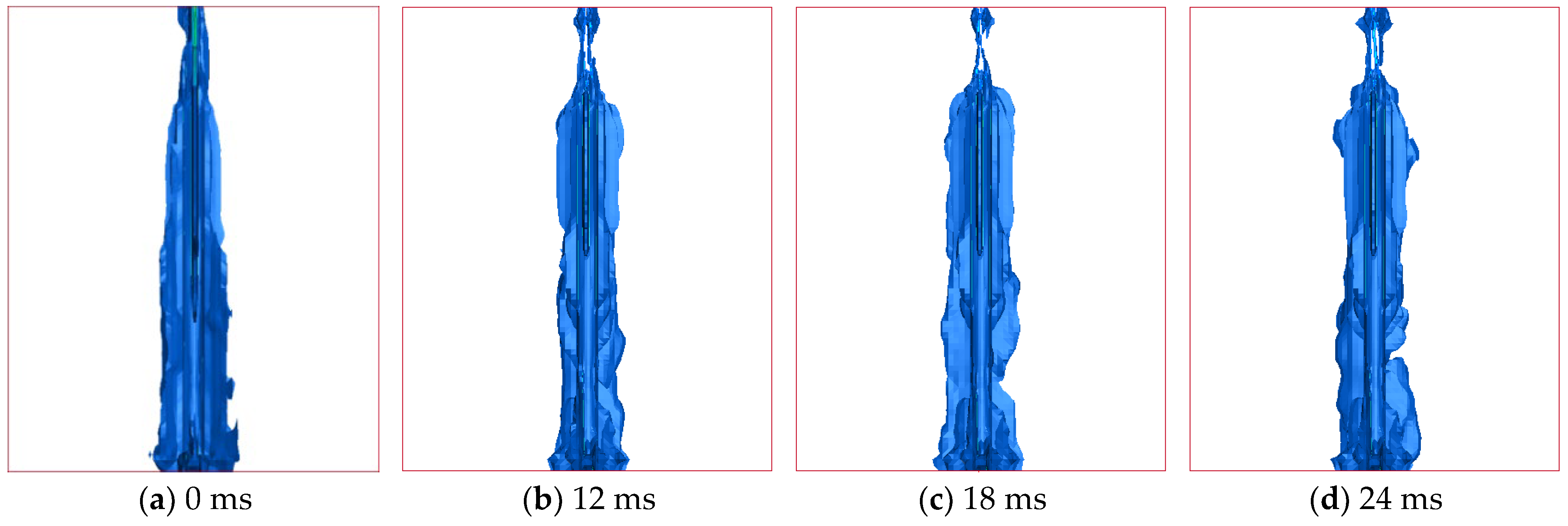
Figure 9. Side views of the damage cloud diagrams constructed for the four models are shown in
Figure 10, and a summary of the damage depth measurement data is presented in
Table 9.
When measuring the damage caused to the rock mass after blasting and only varying the inter-hole delay time, it is found that, within the same region, the depth of the damage caused to the rock mass is greatest when the inter-hole delay time is 0 ms, and smallest when the inter-hole delay time is 18 ms; this is shown in
Table 9. This indicates that the rock damage is not necessarily reduced with longer delay times. The reason for this is that simultaneous detonation during pre-splitting blasting results in the strongest superposition of explosive stresses. Sequential hole pre-splitting blasting can effectively reduce the superposition of explosive stresses, thereby decreasing the intensity of the stress. However, the free-face effect of the free surfaces created by the previously detonated holes on the subsequently detonated holes cannot be ignored. The fragmented rock area created by the first detonated hole essentially provides a new free surface for the subsequently detonated holes, which enhances the blasting effect after the detonation of the latter. Therefore, when using sequential hole pre-splitting blasting technology, it is particularly important to select an appropriate inter-hole delay time.
From
Figure 11a, it can be seen that in the simultaneous detonation method, the explosives in the blast holes detonate at the same time. The size and morphology of the damage caused to the rock mass around the three blast holes are roughly the same, exhibiting a certain symmetry in the overall damage. From
Figure 11b–d, it is evident that in the sequential detonation method, the explosives in the blast holes detonate separately at the set delay times. Except for the first detonated hole, where the damage does not change significantly compared to
Figure 11a, the subsequently detonated holes exhibit significant changes in the size and morphology of the damage caused to the rock mass around them due to the influence of the previously detonated holes. Moreover, the damage caused to the rock mass around the subsequently detonated holes is smaller than that around the first detonated hole. The similarities among
Figure 11a–d are due to the failure characteristics of the rock mass around the blast holes in simultaneous detonation pre-splitting blasting being similar to those in sequential hole pre-splitting blasting. The differences are that, compared to the two detonation methods, simultaneous detonation pre-splitting blasting results in a larger damage range and a wider damage zone between the holes; meanwhile, sequential hole pre-splitting blasting produces a smaller damage range and a narrower damage zone between the holes. In sequential hole pre-splitting blasting, because the subsequently detonated holes can achieve connectivity with the previously detonated holes, the damage range tends to decrease. The depth and extent of blasting damage caused to the retained rock mass are smaller, which ensures the stability of the retained rock mass. At the same time, it can be seen that the choice of delay time has a relatively small impact on the damage caused to the rock mass around the blast holes. In order to ensure complete connectivity between the holes, we should strive to minimize the damage range, thereby reducing the impact on the stability of the retained rock mass.
4.3. Effective Stress Analysis of Specific Element
In the numerical simulation analysis, the stress experienced by a particular element in the numerical model is primarily described by analyzing its von Mises equivalent stress, which is used to analyze the failure characteristics of rock blasting. When the peak effective stress experienced by the selected element exceeds the dynamic tensile strength of the rock, the rock element is considered damaged [
39].
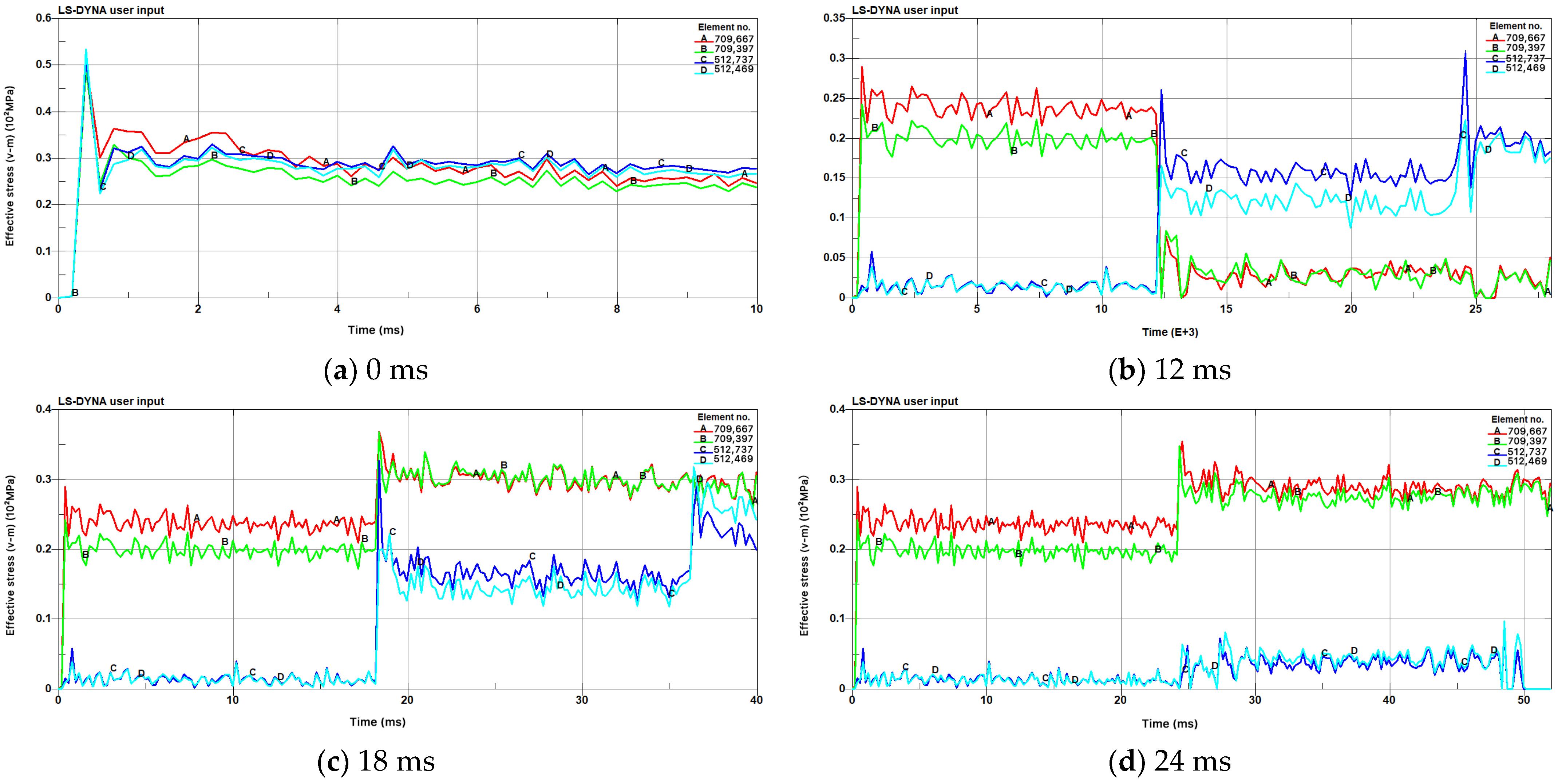
Based on the numerical simulation model presented in the previous section, the effective stresses of the selected characteristic elements were output and analyzed using the LS-PREPOST 4.10 post-processing software to investigate the influence of different inter-hole delay times during pre-splitting blasting on stress propagation. The model was cut in half along the Z-axis, and four characteristic elements that were symmetrically distributed along the centerline connecting the blast holes were selected. During sequential detonation, the rightmost hole (Hole 1) was the first to detonate. The selected characteristic elements were A (H709667), B (H709399), C (H512737), and D (H512469), which were chosen sequentially from right to left. The locations of the selected characteristic elements are shown in
Figure 12, and the time–history curves of the effective stresses for these elements are presented in
Figure 13.
As shown in
Figure 13, under the simultaneous detonation method, since the four selected characteristic elements are located near the midpoint of the line connecting the blast holes and are symmetrically distributed, the detonation wave propagates outward from the center of the explosive package after detonation, acting on the rock wall near the blast holes and forming an initial stress wave. The time taken for the explosion stress wave to reach these four characteristic elements is almost the same, resulting in similar time–history curves for the effective stress of the four selected elements. After the explosive detonates, the explosion shock wave propagates rapidly, and stress begins to appear in elements A, B, C, and D at around 0.2 ms. The effective stress quickly reaches a peak at around 0.4 ms, with peak values of approximately 50 MPa for all four elements. This peak value is less than the dynamic compressive strength of the rock but greater than its dynamic tensile strength, indicating that the rock elements are damaged under tensile stress. Subsequently, the effective stress decreases and levels off.
As shown in
Figure 13b, under the sequential detonation method, the time–history curves of the effective stress for the four selected characteristic elements exhibit a “step-like” pattern, with similar curves for adjacent elements. After the detonation of the first hole (rightmost), elements A and B, being closer to the explosion source compared to elements C and D, reach their first peak effective stress at around 0.4 ms, while elements C and D reach their first peak at around 0.9 ms. Due to their greater distance from the explosion source at this time, the change in the effective stress for elements C and D is smaller. As the explosion stress wave propagates, its stress intensity decreases as the distance increases. Therefore, the peak effective stress of the selected elements is inversely proportional to their distance from the explosion source, with larger peaks closer to the source and smaller peaks farther away. The peak effective stresses are as follows: element A (29 MPa) > element B (24.3 MPa) > element C (5.91 MPa) > element D (3.94 MPa). At this point, the peak effective stresses of elements A and B exceed the dynamic tensile strength of the rock, causing damage to these elements; meanwhile, elements C and D remain undamaged as their peak stresses are below the dynamic tensile strength. Subsequently, the effective stress decreases and levels off.
At 12 ms, the middle blast hole detonates. The distances from the selected four elements to the explosion source are almost the same, and the explosion stress wave reaches these elements at almost the same time. Therefore, the time–history curves of the effective stress for all four elements change significantly at almost the same moment (around 12.2 ms) and reach a second peak at around 12.4 ms. The peak effective stresses are as follows: element C (26.2 MPa) > element D (16.6 MPa) > element B (9.45 MPa) > element A (7.79 MPa). At this point, the peak effective stresses of elements C and D exceed the dynamic tensile strength of the rock, causing damage to these elements. Subsequently, the effective stress decreases and levels off.
At 24 ms, the leftmost blast hole detonates. Since elements C and D are now closer to the explosion source, the stress intensity of the explosion stress wave reaching them is greater, resulting in significant changes in their effective stress, with a third peak appearing at around 24.6 ms. Elements A and B, being farther from the explosion source at this time, experience smaller changes in the effective stress, with less pronounced peaks.
In pre-splitting blasting with sequential detonation, even when the inter-hole delay times are varied, the time–history curves of the effective stress for the selected characteristic elements exhibit similar overall patterns, with differences primarily being present in the magnitude of the stress peaks. To avoid repetition, only models with delay times of 0 ms and 12 ms are analyzed in detail, while models with delay times of 18 ms and 24 ms are presented in figure form without further elaboration. The specific data regarding the peak effective stresses of the selected characteristic elements for the four delay times are summarized in
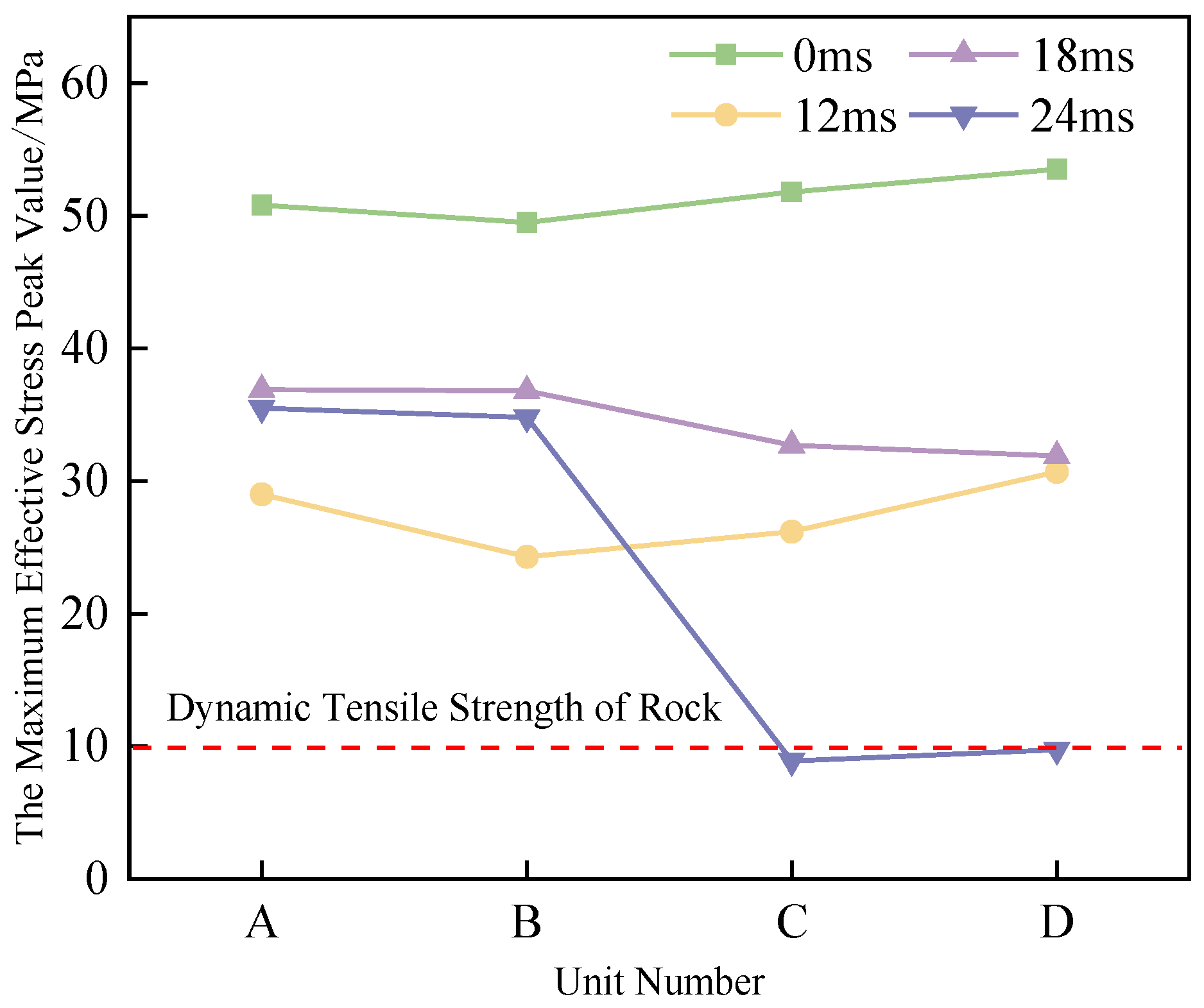
Table 10.
The variation curves of the maximum effective stress peaks for elements A, B, C, and D under different inter-hole delay settings are plotted, as shown in
Figure 14. Under different inter-hole delay time settings, when the delay times are set to 0 ms, 12 ms, and 18 ms, the maximum effective stress peaks of elements A, B, C, and D are all greater than the dynamic tensile strength of the rock, indicating that these four elements can all be destroyed. When the inter-hole delay time is set to 24 ms, the maximum effective stress peaks of elements A and B are greater than the dynamic tensile strength of the rock, while those of elements C and D are less than the dynamic tensile strength, indicating that elements A and B can be destroyed, but elements C and D cannot. When the inter-hole delay time is set to 0 ms, which corresponds to simultaneous initiation, the maximum effective stress peaks of elements A, B, C, and D are all greater than those at other delay times due to the optimal stress superposition effect. For sequential initiation, the magnitude of the inter-hole delay time is not inversely proportional to the peak effective stress experienced by the elements. When the inter-hole delay time is set to 18 ms, the peak effective stress of the selected characteristic elements is greater than that at delay times of 12 ms and 24 ms. It is therefore crucial to appropriately set the inter-hole delay time in order to ensure the rock fragmentation effect.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}