
Estimation of Fuel Cell Power Demand on Commercial Vehicles Based on Improved Multiple Grey Prediction Method Considering Dynamic Time Window


Abstract
1. Introduction
2. Methodology
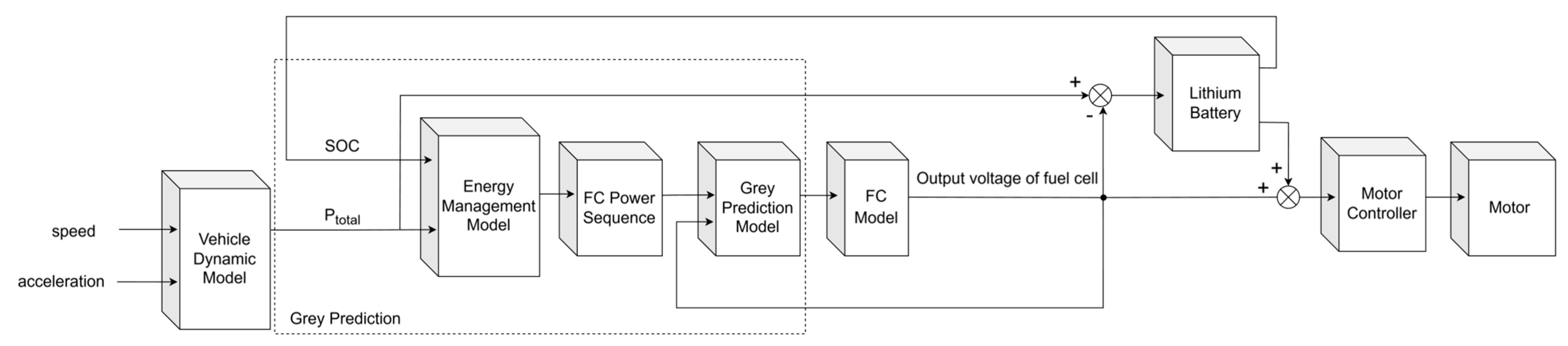
2.1. Fuel Cell Vehicle Power System Modelling
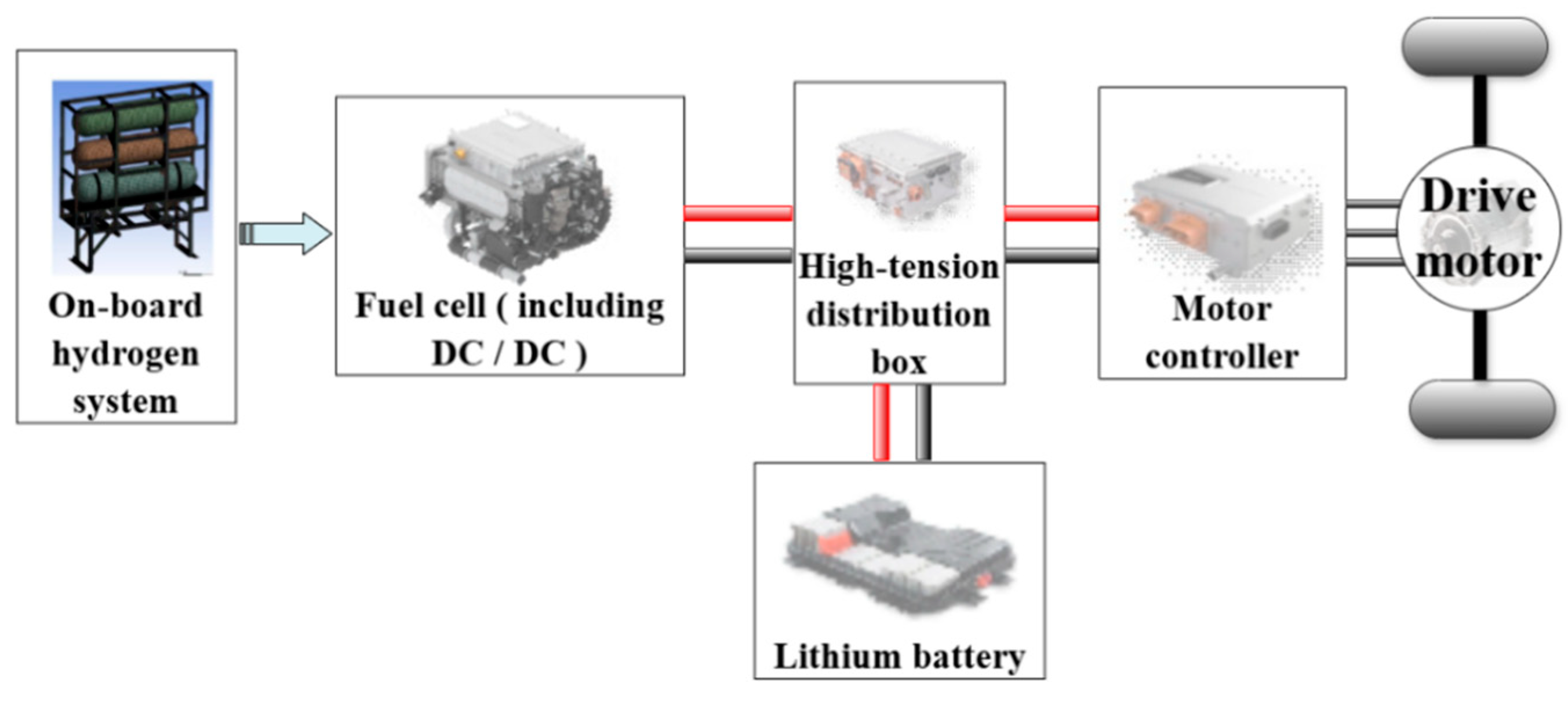
2.1.1. Fuel Cell Power System Topology
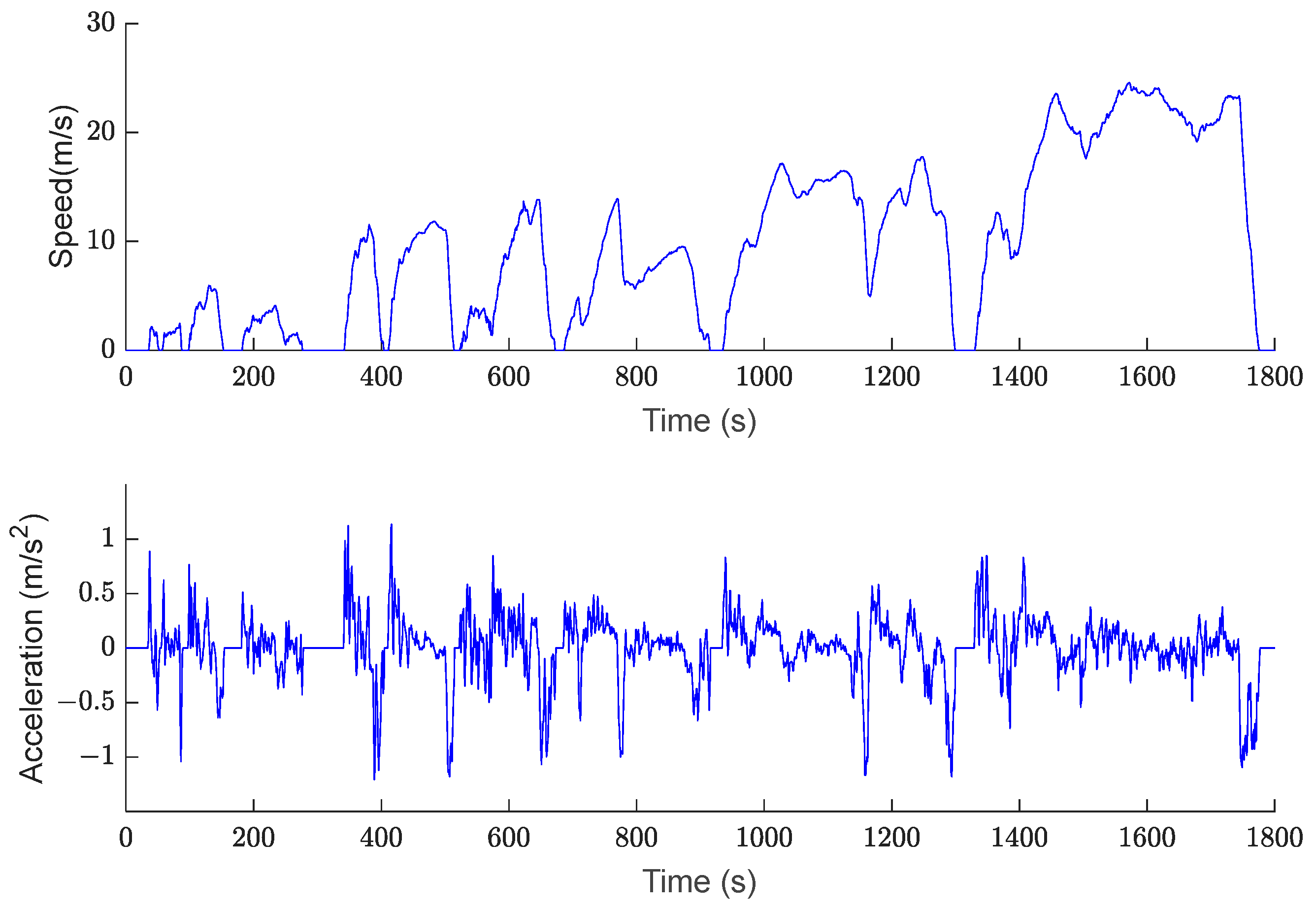
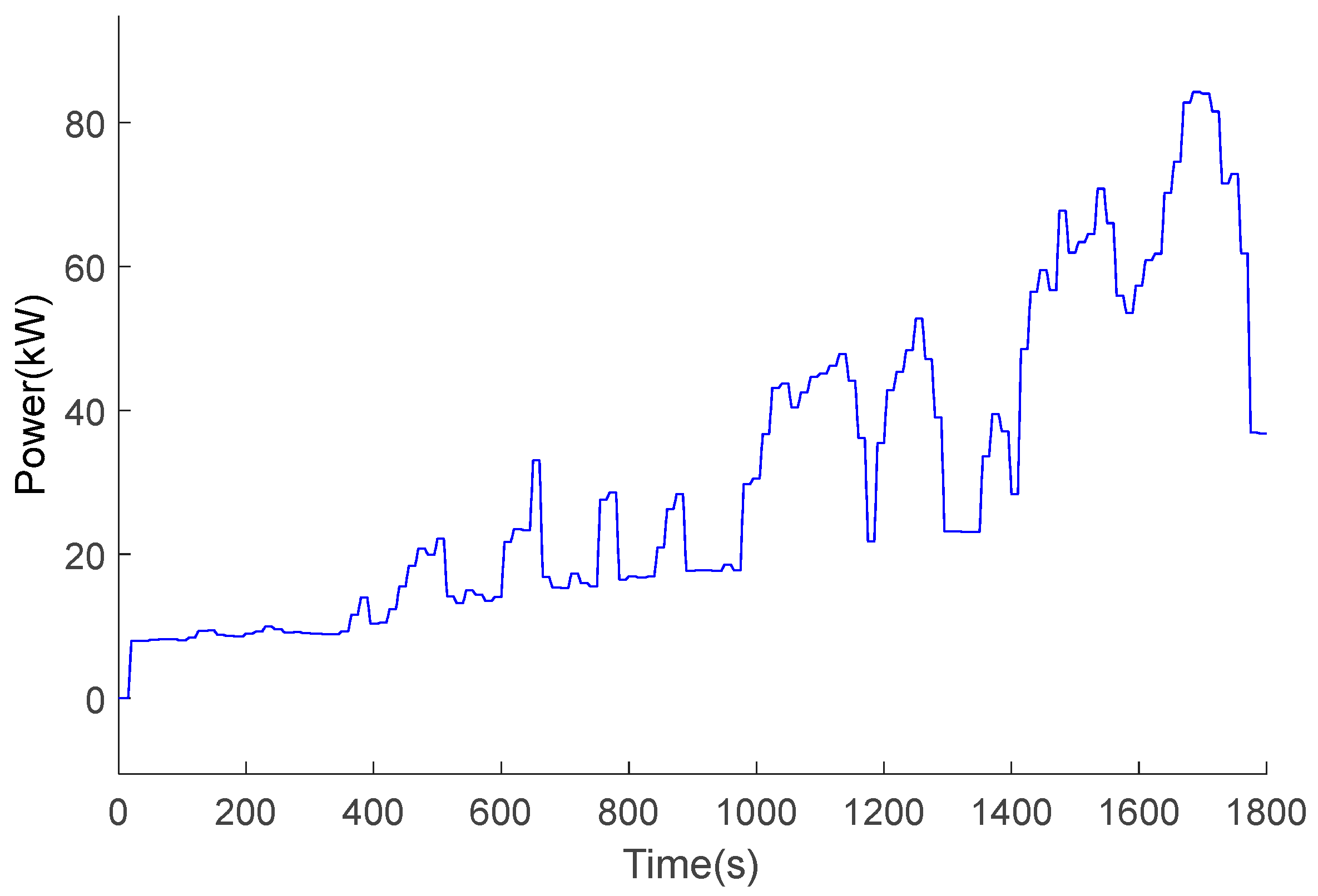
2.1.2. Fuel Cell Variable Load Cycle
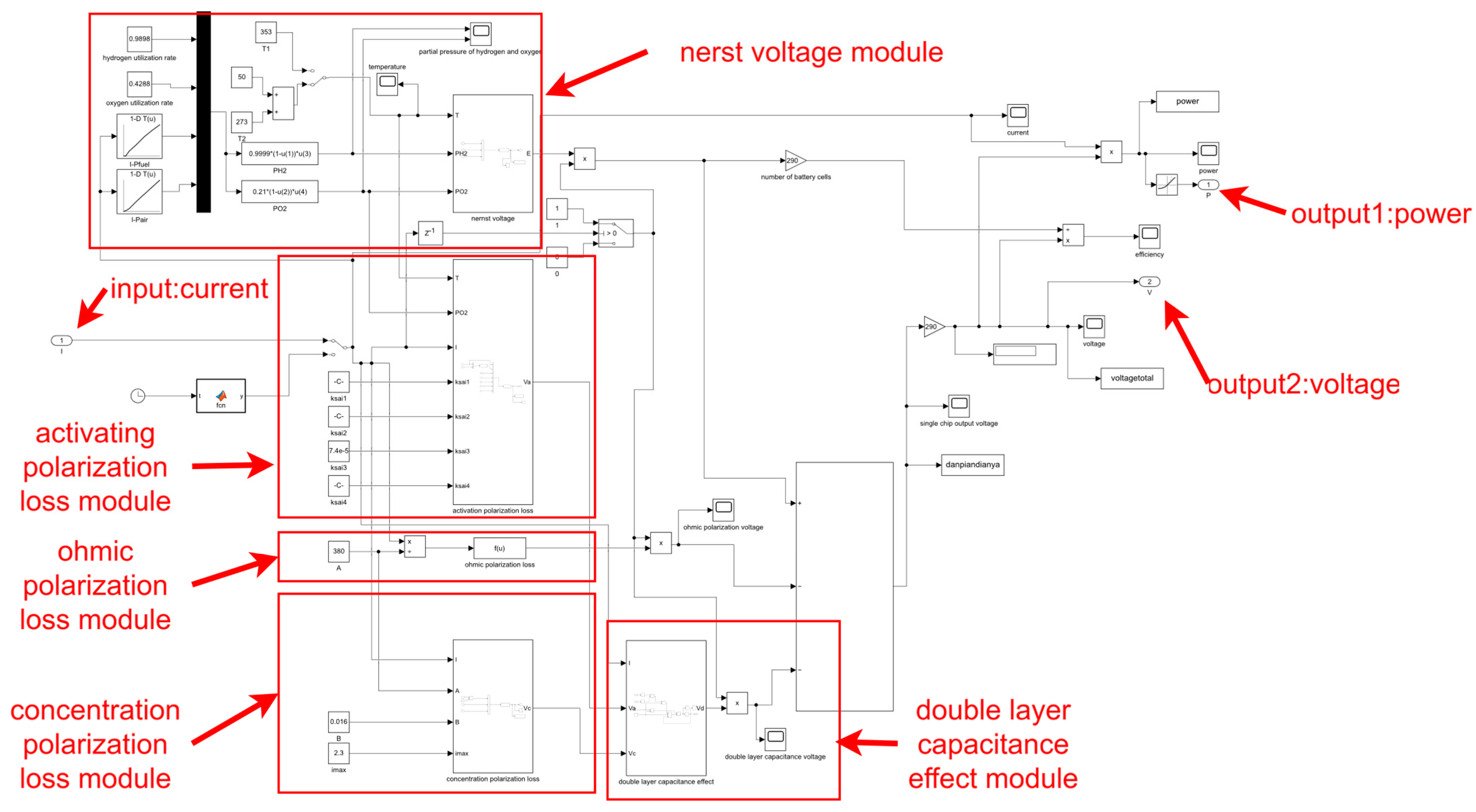
2.1.3. Equivalent Circuit Model
2.2. Grey Prediction Modelling
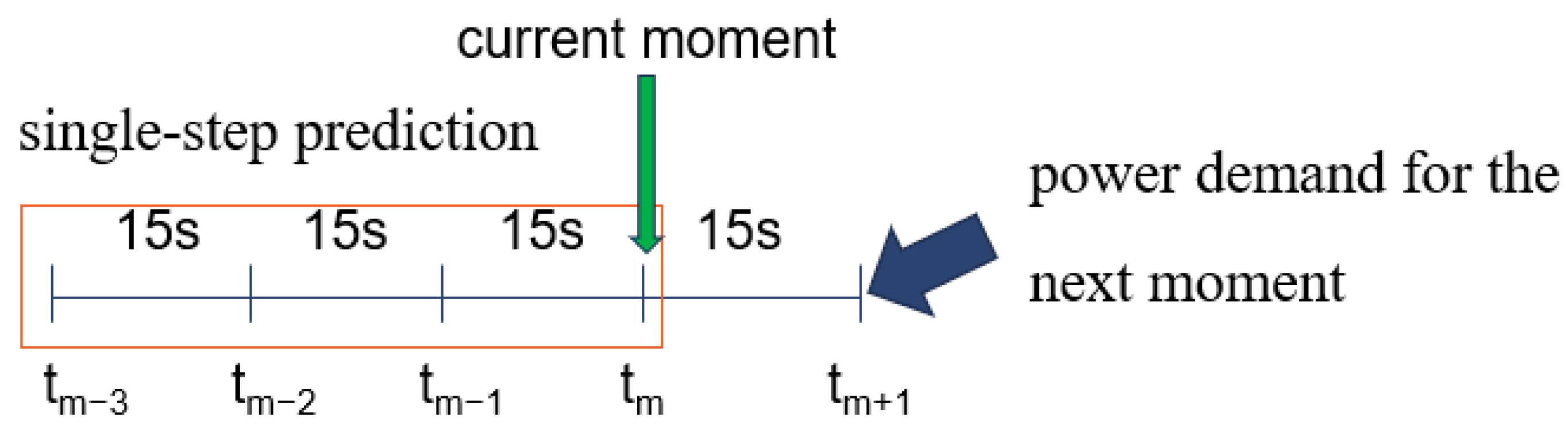
2.2.1. Single-Step Grey Prediction
2.2.2. Multi-Step Grey Prediction
2.2.3. Multiple Grey Prediction
3. Method Preprocessing
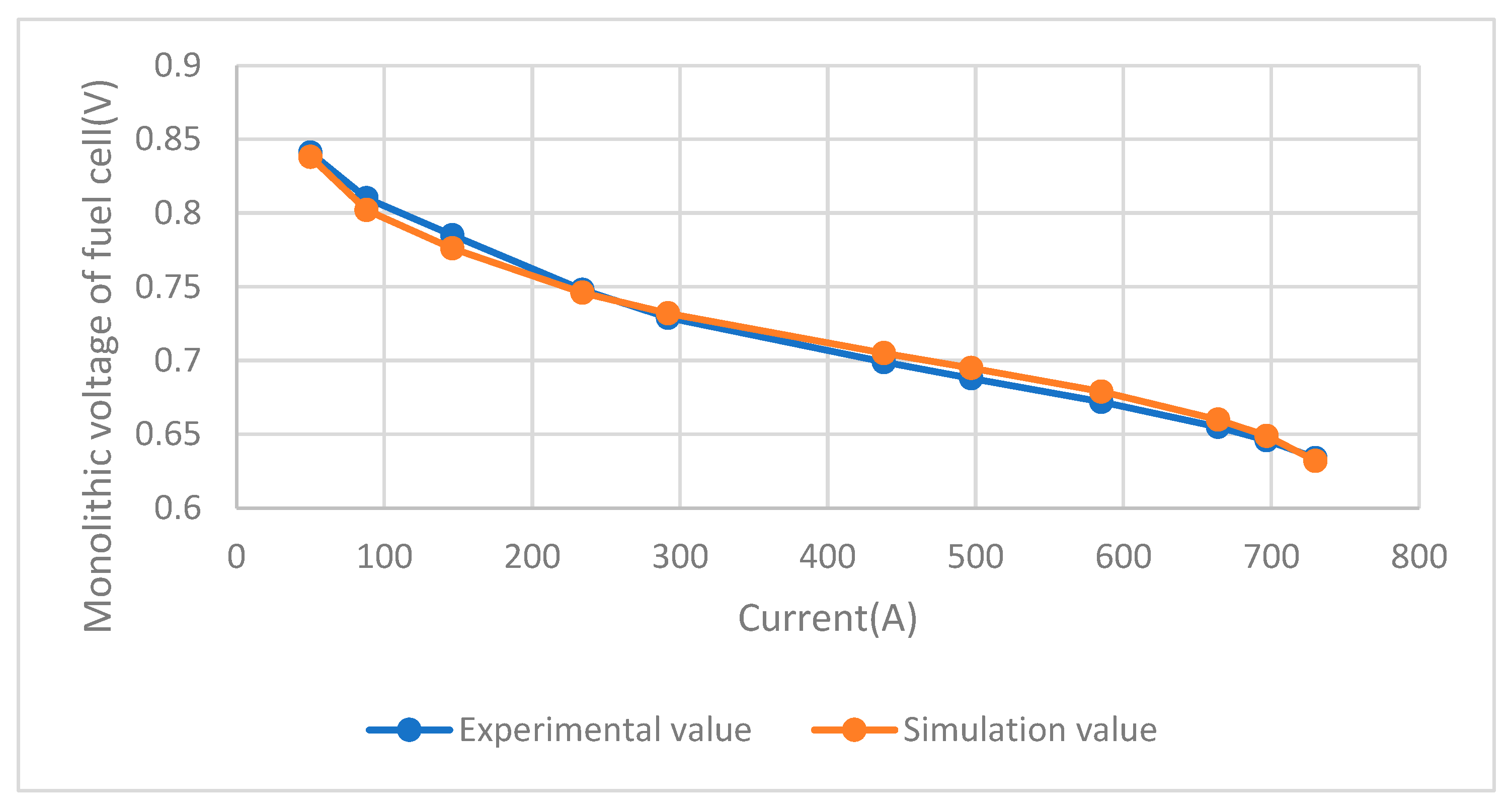
3.1. Fuel Cell Model Equivalent Circuit Model Evaluation
3.2. Model Input Condition
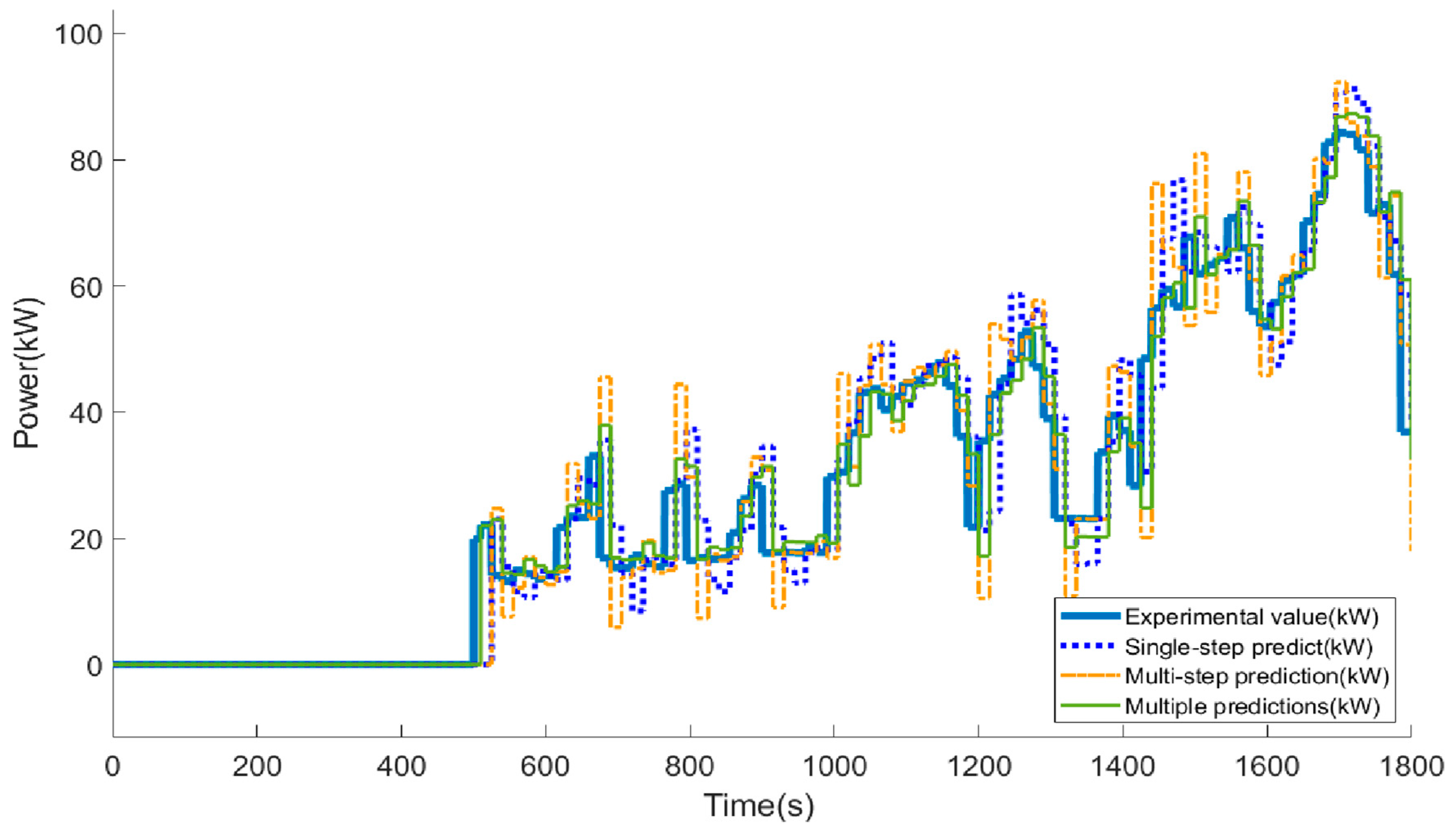
4. Results
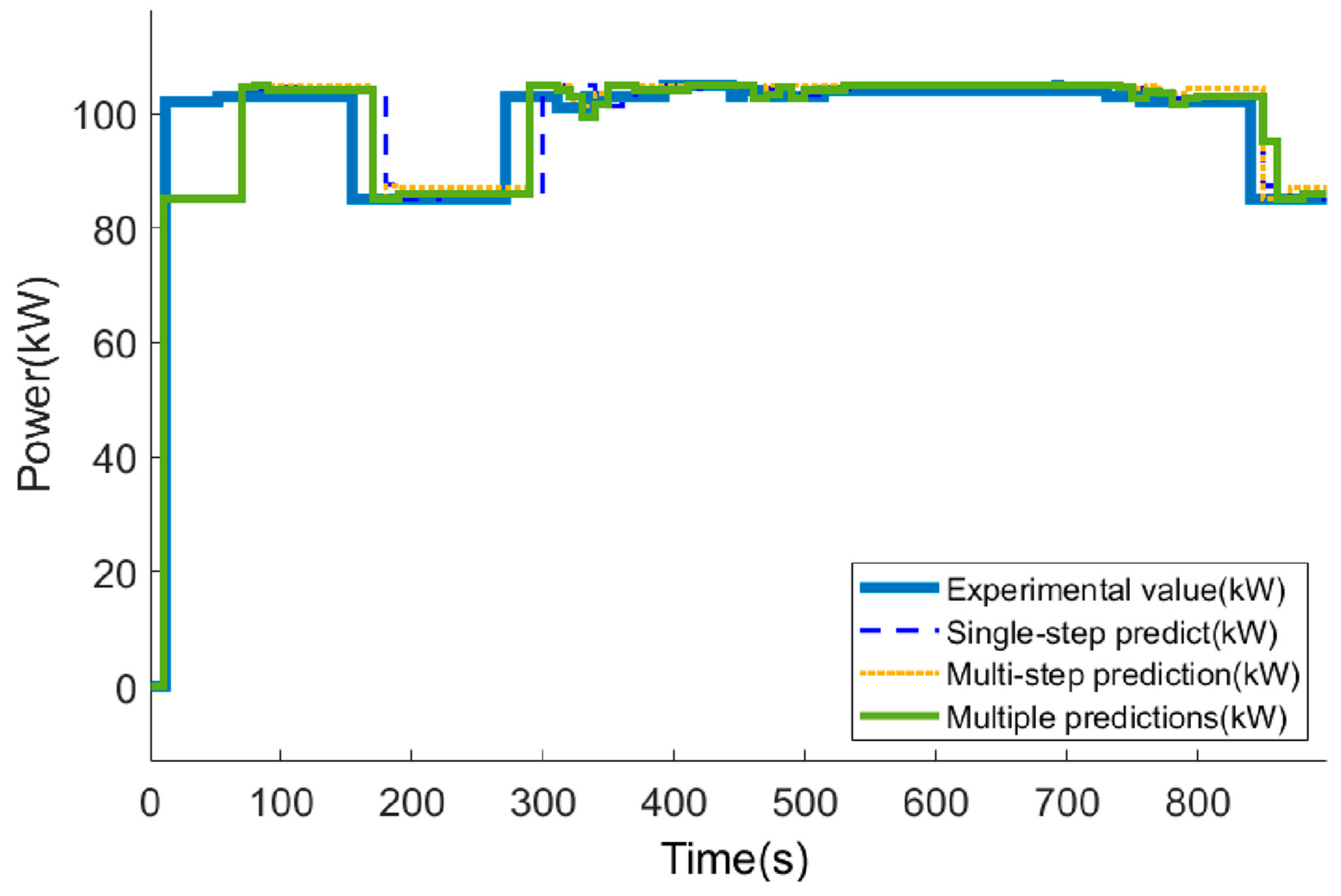
4.1. Under CHTC-HT Working Condition
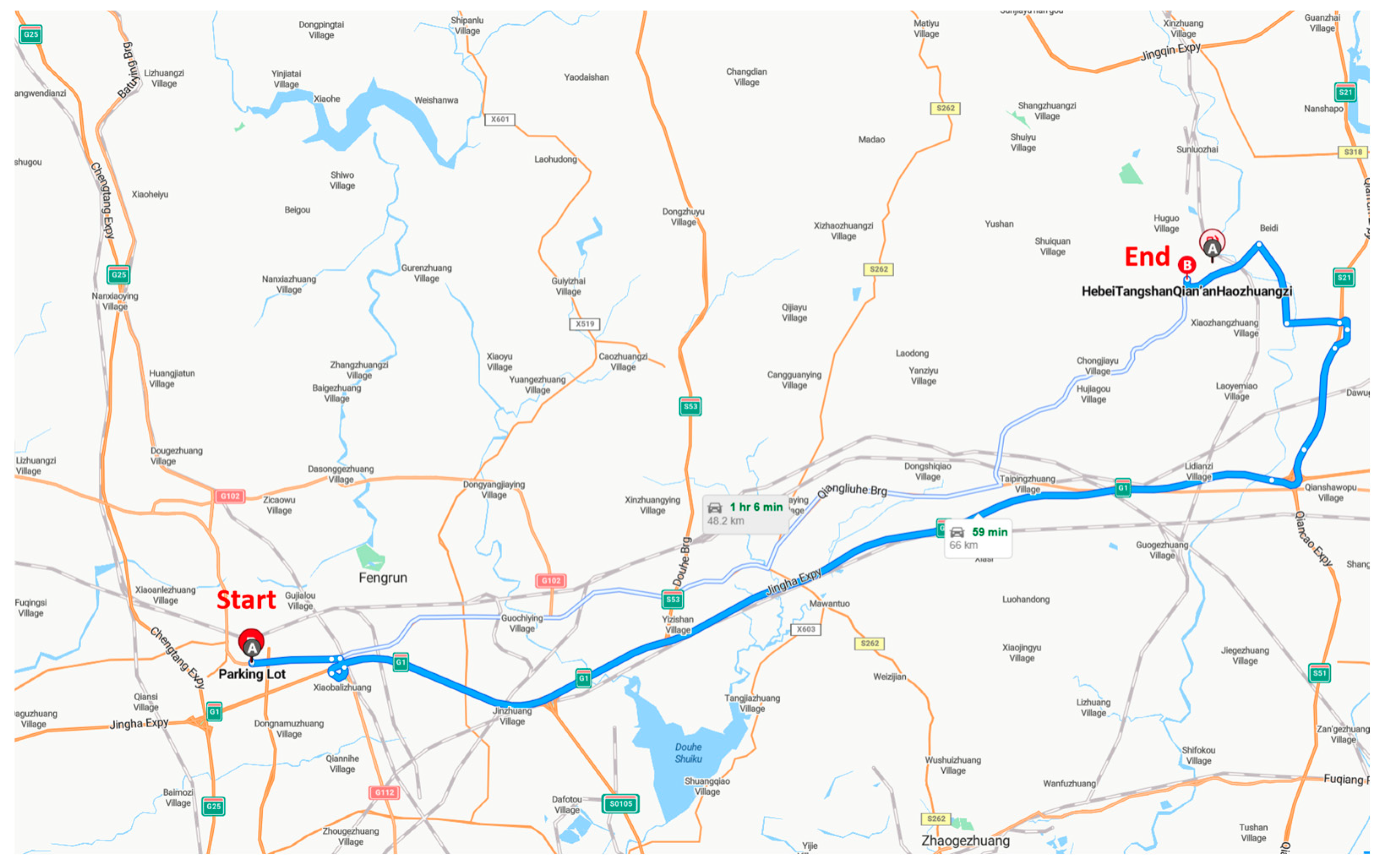
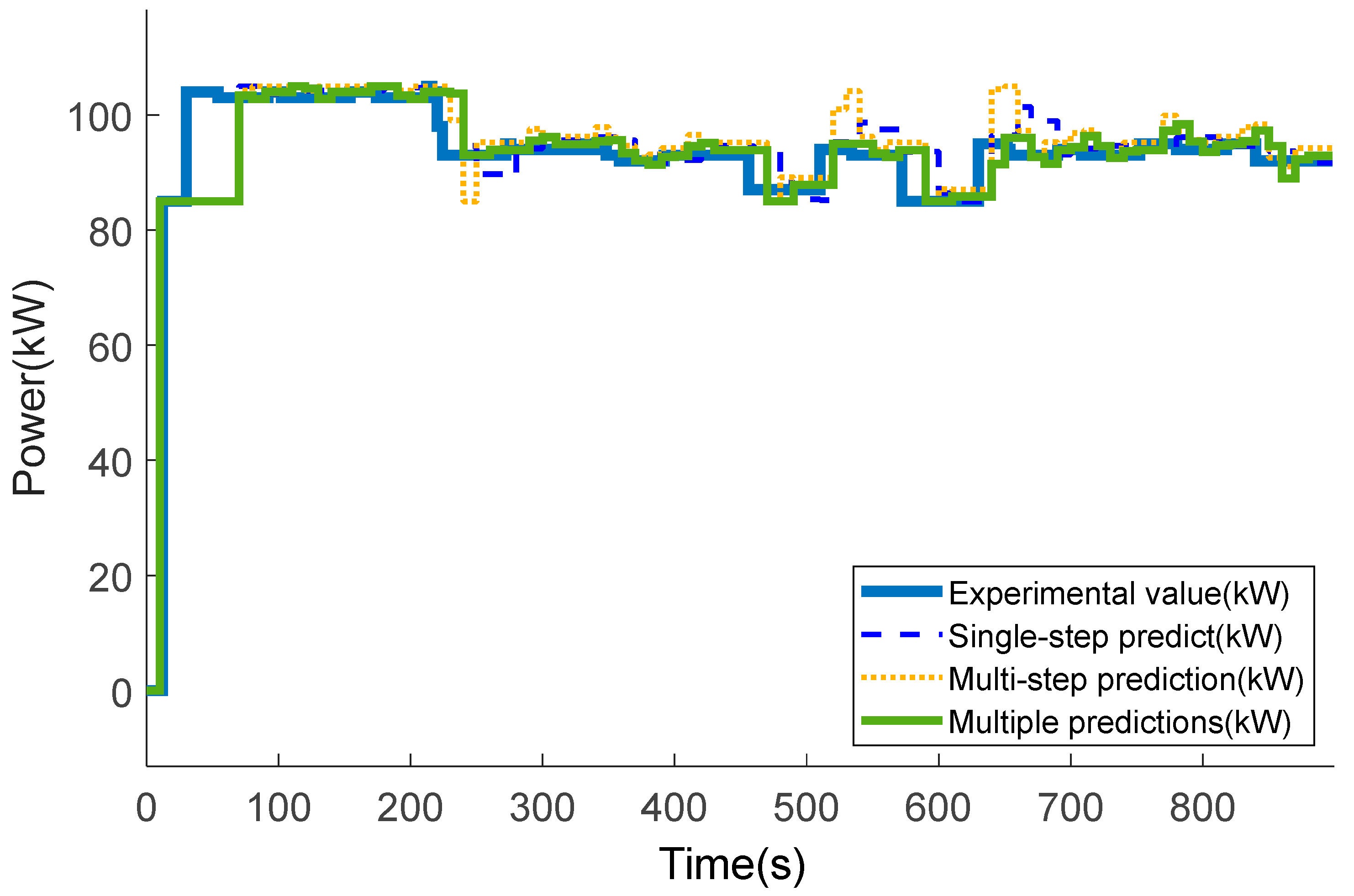
4.2. Under Field-Testing Working Condition
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wei, T.; Yu, P.; Xue, B.; Zhang, Y.; Li, W. Modeling, Simulation and Characteristic Research of Proton Exchange Membrane Fuel Cell. Agric. Equip. Veh. Eng. 2022, 60, 41–46. [Google Scholar]
- Wang, T.; Li, Q.; Yang, H.; Yin, L.; Wang, X.; Qiu, Y.; Chen, W. Adaptive Current Distribution Method for Parallel-connected PEMFC Generation System Considering Performance Consistency. Energy Convers. Manag. 2019, 196, 866–877. [Google Scholar] [CrossRef]
- Qasem, N.A.; Abdulrahman, G.A. A Recent Comprehensive Review of Fuel Cells: History, Types, and Applications. Int. J. Energy Res. 2024, 2024, 7271748. [Google Scholar] [CrossRef]
- Zheng, C.; Oh, C.; Park, Y.; Cha, S. Fuel Economy Evaluation of Fuel Cell Hybrid Vehicles Based on Equivalent Fuel Consumption. Int. J. Hydrogen Energy 2012, 37, 1790–1796. [Google Scholar] [CrossRef]
- Yang, L. Research on Energy Management Strategy of Fuel Cell Vehicle Considering Battery Life Degradation. Master’s Thesis, Jilin University, Jilin, China, 2022. [Google Scholar]
- Hu, Z. Durability Modeling and State Estimation for Vehicular Fuel Cell System. Ph.D. Thesis, Tsinghua University, Beijing, China, 2019. [Google Scholar]
- Huang, R.; Peng, Y.; Yang, J.; Xu, X.; Deng, P. Correlation analysis and prediction of PEM fuel cell voltage during start-stop operation based on real-world driving data. Energy 2022, 260, 124930. [Google Scholar] [CrossRef]
- Tao, H.; Hu, Z.; Wang, Z.; Li, J.; Xu, L.; Ouyang, M. Working Conditions Analysis and Performance Degradation Estimation of Fuel Cell Buses Based on Real Road Data. In Proceedings of the 2023 7th CAA International Conference on Vehicular Control and Intelligence (CVCI 2023), Changsha, China, 27–29 October 2023. [Google Scholar]
- Bahrami, M.; Martin, J.; Maranzana, G.; Pierfederici, S.; Weber, M.; Didierjean, S. Fuel Cell Management System: An Approach to Increase Its Durability. Appl. Energy 2022, 306, 118070. [Google Scholar] [CrossRef]
- Bressel, M.; Hilairet, M.; Hissel, D.; Ould Bouamama, B. Remaining Useful Life Prediction and Uncertainty Quantification of Proton Exchange Membrane Fuel Cell under Variable Load. IEEE Trans. Ind. Electron. 2016, 63, 2569–2577. [Google Scholar] [CrossRef]
- Jouin, M.; Gouriveau, R.; Hissel, D.; Pera, M.; Zerhouni, N. Prognostics of PEM Fuel Cell in a Particle Filtering Framework. Int. J. Hydrogen Energy 2014, 39, 481–494. [Google Scholar] [CrossRef]
- Zhu, L.; Chen, J. Prognostics of PEM Fuel Cells Based on Gaussian Process State Space Models. Energy 2018, 149, 63–73. [Google Scholar] [CrossRef]
- Javed, K.; Gouriveau, R.; Zerhouni, N.; Hissel, D. Prognostics of Proton Exchange Membrane Fuel Cells Stack Using an Ensemble of Constraints Based Connectionist Networks. J. Power Sources 2016, 324, 745–757. [Google Scholar] [CrossRef]
- Liu, H.; Chen, J.; Hou, M.; Shao, Z.; Su, H. Data-based Short-term Prognostics for Proton Exchange Membrane Fuel Cells. Int. J. Hydrogen Energy 2017, 42, 20791–20808. [Google Scholar] [CrossRef]
- Zeng, T. Research on Approach and Application of Short-term Power Demand Prediction in Fuel Cell Vehicles. Ph.D. Thesis, Chongqing University, Chongqing, China, 2021. [Google Scholar]
- Liu, S.; Tao, L.; Xie, N.; Yang, Y. On the New Model System and Framework of Grey System Theory. J. Grey Syst. 2016, 28, 1–15. [Google Scholar]
- Lin, S.; Wang, R.; Li, M.; Zhou, J.; Deng, Y.; Luo, T.; Zhang, J.; Destech Publicat, I. Power Investment Prediction Based on the Improved GM(1,1) Model. In Proceedings of the International Conference on Electrical, Control, Automation and Robotics (ECAR), Xiamen, China, 16–17 September 2018. [Google Scholar]
- Li, Y.; Mei, G.; Gaol, J.; Jiang, C.; Yuan, J. Application of Improved Failure Mode Recognition Algorithms and GM(1,1) Model on Fatigue Lifetime Prediction of Truss Structure. J. Grey Syst. 2014, 26, 85–95. [Google Scholar]
- Ai, H.; Shi, Y. Application of GM (1,1) Model in PM2.5 Content Prediction. In Proceedings of the 2016 3rd International Conference on Education, Management and Computing Technology (ICEMCT), Hangzhou, China, 9–10 April 2016. [Google Scholar]
- Sun, C. Research on Prediction of Visitors Quantity Based on GM(1,1)Method. In Proceedings of the 3rd Annual 2017 International Conference on Management Science and Engineering (MSE), Guilin, China, 18–20 August 2017. [Google Scholar]
- Zheng, X. Application of Grey System Theory to Regional Logistics Demand Prediction. In Proceedings of the World Automation Congress 2012 (WAC), Puerto Vallarta, Mexico, 24–28 June 2012; IEEE: New York, NY, USA. [Google Scholar]
- Ye, J.; Dang, Y.; Wang, J.; Yang, Y. Grey Prediction Model of Interval Grey Numbers Based on a Novel Compound Function Transformation. J. Grey Syst. 2017, 29, 155–176. [Google Scholar]
- Wang, X.; Qi, L.; Chen, C.; Tang, J.; Jiang, M. Grey System Theory Based Prediction for Topic Trend on Internet. Eng. Appl. Artif. Intell. 2014, 29, 191–200. [Google Scholar] [CrossRef]
- Chen, S.; Wang, D.; Liang, J. Sound Quality Analysis and Predicton of Vehicle Interior Noise Based on Grey System Theory. Fluct. Noise Lett. 2012, 11, 1250016. [Google Scholar] [CrossRef]
- Sie, W.; Lian, R.; Lin, B. Enhancing Grey Prediction Fuzzy Controller for Active Suspension Systems. Veh. Syst. Dyn. 2006, 44, 407–430. [Google Scholar] [CrossRef]
- Fu, Z.; Chen, Q.; Zhang, L.; Fan, J.; Zhang, H.; Deng, Z. Research on Energy Management Strategy of Fuel Cell Power Generation System Based on Grey-Markov Chain Power Prediction. Energy Rep. 2021, 7, 319–325. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, J.; Zhu, X.; Ye, J.; Kong, Y.; Hao, W. A GM-Based Energy Management Strategy of Hybrid Power System for Hydrogen Fuel Cell Buses. J. Adv. Transp. 2023, 2023, 6656612. [Google Scholar] [CrossRef]
- China Automotive Technology Research Center Co., Ltd. China Automotive Test Cycle-Part 2: Heavy-Duty Commercial Vehicles [Z]; The State Administration for Market Regulation of China: Beijing, China, 2019.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Type | 49 Ton Fuel Cell Semi-Tractor |
|---|---|
| Rated power of drive motor (kW) | 236 |
| Peak power of drive motor (kW) | 360 |
| Fuel cell power rating (kW) | 125 |
| Power battery total energy (kWh) | 141.312 |
| Power battery nominal voltage (V) | 614.4 |
| Power battery nominal capacity (Ah) | 230 |
| Power battery pulse discharge ratio (C) | 2 |
| Power battery pulse discharge time (s) | 30 |
| Current (A) | Fuel Cell Stack Power (W) | Absolute Ratio Error (%) | |
|---|---|---|---|
| Experimental Value | Simulation Value | ||
| 50 | 13.9 | 13.8 | 0.72 |
| 88 | 23.5 | 23.3 | 0.85 |
| 146 | 37.8 | 37.4 | 1.06 |
| 234 | 57.7 | 57.6 | 0.17 |
| 292 | 70.2 | 70.1 | 0.14 |
| 438 | 101.1 | 101.9 | 0.79 |
| 497 | 112.8 | 113.9 | 0.98 |
| 585 | 129.7 | 131.1 | 1.08 |
| 664 | 143.4 | 144.6 | 0.84 |
| 697 | 148.5 | 149.2 | 0.47 |
| 730 | 152.7 | 152.3 | 0.26 |
| Mean relative percentage error: 0.67% | |||
| Grey Prediction Strategies | Average Relative Prediction Error (%) |
|---|---|
| Single-step prediction | 22.957 |
| Multi-step prediction | 23.366 |
| Multiple prediction | 16.944 |
| Grey Prediction Strategies | Average Relative Prediction Error (%) |
|---|---|
| Single-step prediction | 2.262 |
| Multi-step prediction | 2.502 |
| Multiple prediction | 2.169 |
| Grey Prediction Strategies | Average Relative Prediction Error (%) |
|---|---|
| Single-step prediction | 2.719 |
| Multi-step prediction | 3.151 |
| Multiple prediction | 1.930 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Li, Y.; Lu, J.; Zhou, H. Estimation of Fuel Cell Power Demand on Commercial Vehicles Based on Improved Multiple Grey Prediction Method Considering Dynamic Time Window. Appl. Sci. 2025, 15, 1213. https://doi.org/10.3390/app15031213
Wang Y, Li Y, Lu J, Zhou H. Estimation of Fuel Cell Power Demand on Commercial Vehicles Based on Improved Multiple Grey Prediction Method Considering Dynamic Time Window. Applied Sciences. 2025; 15(3):1213. https://doi.org/10.3390/app15031213
Chicago/Turabian StyleWang, Yuan, Yingjia Li, Jianshan Lu, and Hongbo Zhou. 2025. "Estimation of Fuel Cell Power Demand on Commercial Vehicles Based on Improved Multiple Grey Prediction Method Considering Dynamic Time Window" Applied Sciences 15, no. 3: 1213. https://doi.org/10.3390/app15031213
APA StyleWang, Y., Li, Y., Lu, J., & Zhou, H. (2025). Estimation of Fuel Cell Power Demand on Commercial Vehicles Based on Improved Multiple Grey Prediction Method Considering Dynamic Time Window. Applied Sciences, 15(3), 1213. https://doi.org/10.3390/app15031213