
Emergency Resource Dispatch Scheme for Ice Disasters Based on Pre-Disaster Prediction and Dynamic Scheduling


Abstract
1. Introduction
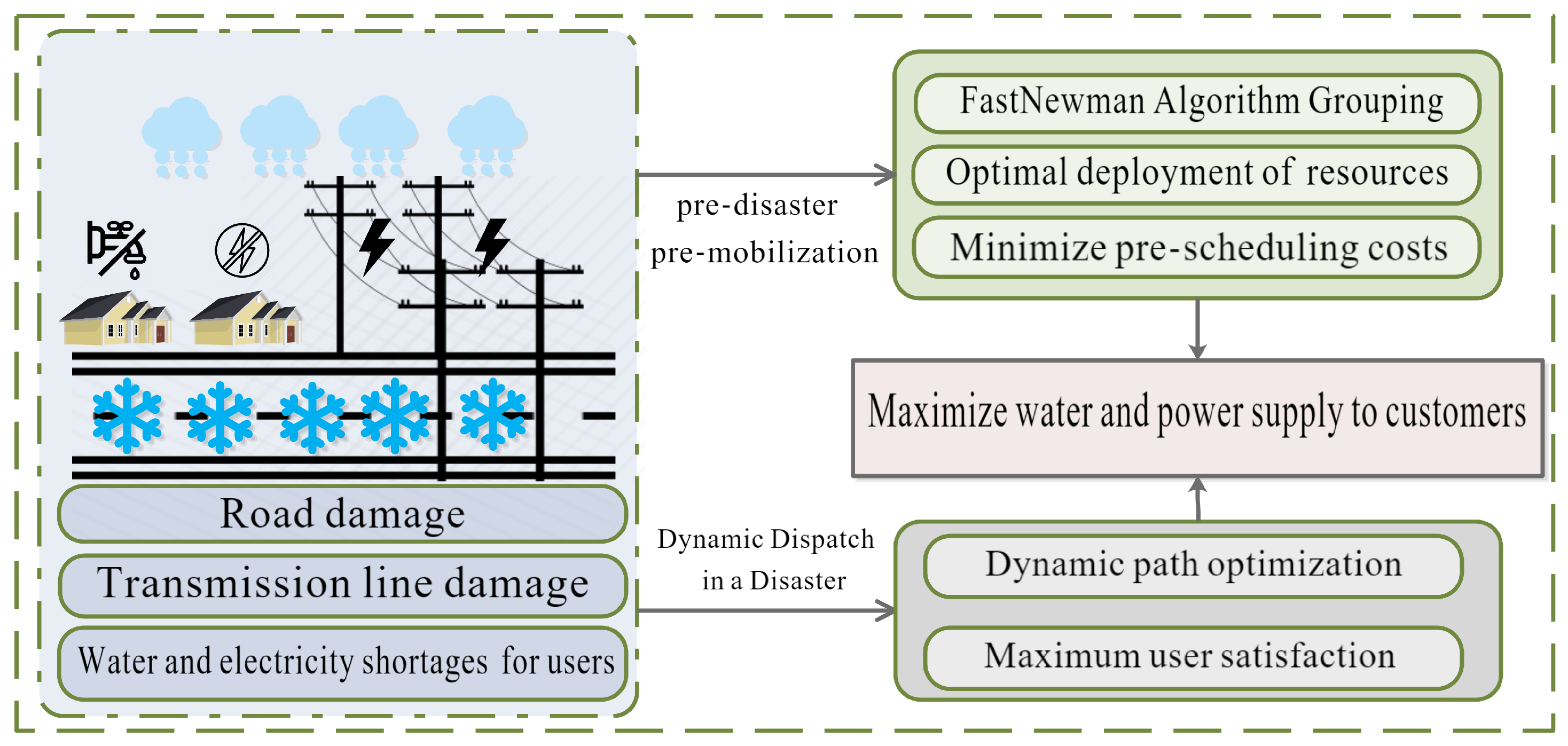
- Model Development: We propose a user satisfaction model based on response time, which comprehensively considers the timeliness of resource supply and scheduling efficiency.
- Optimization of Dispatch Scheme: By integrating ice disaster trajectory predictions, the fast Newman algorithm is employed for regional partitioning. In addition, mobile energy and water storage vehicles are pre-deployed before the disaster to improve emergency response speed.
- Resource Dispatch Optimization: A grouped scheduling strategy is adopted to reduce cross-regional resource flow and enhance resource utilization efficiency, while dispatch routes are dynamically adjusted based on real-time traffic network conditions to improve system stability and resilience.
2. Failure Rate Modeling in Ice Disaster Scenarios
2.1. Ice Disaster Trajectory Prediction
2.2. Failure Rate Modeling
2.3. Fast Newman Algorithm-Based Grouping Model
| Algorithm 1 Modified fast Newman algorithm for finding max Q |
Input: Network data, DERs allocation Output: Partitioned result
|
3. Integrated Disaster Resource Scheduling Modeling
3.1. Pre-Disaster Resource and Facility Optimization
- Minimization of Freshwater and Electricity Procurement Costs: By implementing rational community partitioning, resource demands in each region are optimally matched before the disaster to reduce procurement redundancy and waste while enhancing the accuracy of resource distribution.
- Minimization of Cross-Regional Resource Dispatch Costs: We apply the fast Newman algorithm for community partitioning to optimize scheduling efficiency within each region and reduce economic costs and transportation losses associated with inter-regional resource transfers while simultaneously enhancing the timeliness and accuracy of resource dispatch.
- Minimization of Deployment Costs for Mobile Energy Storage and Water Supply Vehicles: By optimizing regional partitioning, mobile energy storage vehicles and water supply vehicles can be strategically deployed to minimize dispatch distances, thereby improving resource allocation accuracy and reducing overall dispatch costs.
- Enhancement of Disaster Response Capability and System Reliability: Optimizing the layout of charging stations and reservoirs ensures efficient energy and water supplies during disasters while minimizing supply–demand gaps in high-priority load areas to improve system reliability and resilience [29].
3.1.1. Pre-Disaster Resource Optimization
3.1.2. Pre-Deployment of Charging Stations and Reservoirs
3.1.3. Constraints
3.2. User Satisfaction-Oriented Dynamic Scheduling Model
3.2.1. Spatiotemporal Scheduling Scheme
3.2.2. Path Optimization for Mobile Energy Storage and Water Vehicles
3.2.3. User Satisfaction Maximization Objective Function
3.2.4. Constraints
Constraints of Mobile Energy Storage Vehicles
Constraints of Mobile Water Storage Vehicles
4. Case Study Analysis
4.1. Simulation Setup
4.2. Analysis of Simulation Results
4.3. Sensitivity Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Armenakis, C.; Nirupama, N. Urban impacts of ice storms: Toronto December 2013. Nat. Hazards 2014, 74, 1291–1298. [Google Scholar] [CrossRef]
- Zhang, P.-F.; Tan, Y.-X.; Ai, J.-M.; Chen, R.; Gao, B.; Zhang, H.-X.; Jia, C.-J. Lessons learned from the ice storm in 2008 in Jiangxi China. In Proceedings of the 2009 Asia-Pacific Power and Energy Engineering Conference (APPEEC), Wuhan, China, 27–31 March 2009; pp. 1–4. [Google Scholar]
- Duffey, R.B. Emergency systems and power outage restoration due to infrastructure damage from major floods and disasters. Insight 2020, 23, 43–55. [Google Scholar] [CrossRef]
- Melaku, N.D.; Fares, A.; Awal, R. Exploring the impact of winter storm Uri on power outage, air quality, and water systems in Texas, USA. Sustainability 2023, 15, 4173. [Google Scholar] [CrossRef]
- Li, L.; Tan, E.; Gao, P.; Jin, Y. Enhancing concurrent emergency response: Joint scheduling of emergency vehicles on freeways with tailored heuristic. Appl. Sci. 2024, 14, 7433. [Google Scholar] [CrossRef]
- Mukhopadhyay, A.; Pettet, G.; Vazirizade, S.M.; Lu, D.; Jaimes, A.; Said, S.E.; Baroud, H.; Vorobeychik, Y.; Kochenderfer, M.; Dubey, A. A review of incident prediction, resource allocation, and dispatch models for emergency management. Accid. Anal. Prev. 2022, 165, 106501. [Google Scholar] [CrossRef]
- Call, D.A. Changes in ice storm impacts over time: 1886–2000. Weather. Clim. Soc. 2010, 2, 23–35. [Google Scholar] [CrossRef]
- Su, Z.; Zhang, G.; Liu, Y.; Yue, F.; Jiang, J. Multiple emergency resource allocation for concurrent incidents in natural disasters. Int. J. Disaster Risk Reduct. 2016, 17, 199–212. [Google Scholar] [CrossRef]
- Yao, S.; Wang, P.; Liu, X.; Zhang, H.; Zhao, T. Rolling optimization of mobile energy storage fleets for resilient service restoration. IEEE Trans. Smart Grid 2019, 11, 1030–1043. [Google Scholar] [CrossRef]
- Yao, S.; Wang, P.; Zhao, T. Transportable energy storage for more resilient distribution systems with multiple microgrids. IEEE Trans. Smart Grid 2018, 10, 3331–3341. [Google Scholar] [CrossRef]
- Lin, Y.; He, C.; Zheng, L.; Ning, Y. Data driven urban power grid disaster prediction under extreme weather conditions. In Proceedings of the 2024 7th International Conference on Electronics Technology (ICET), Chengdu, China, 17–20 May 2024; pp. 1184–1190. [Google Scholar]
- Ding, T.; Wang, Z.; Jia, W.; Chen, B.; Chen, C.; Shahidehpour, M. Multiperiod distribution system restoration with routing repair crews, mobile electric vehicles, and soft-open-point networked microgrids. IEEE Trans. Smart Grid 2020, 11, 4795–4808. [Google Scholar] [CrossRef]
- Zhao, R.; Lu, J.; Chen, Y.; Gao, Y.; Li, M.; Wei, C.; Li, J. Active support strategies for power supply in extreme scenarios with synergies between idle and emergency resources in the city. Energies 2025, 18, 1940. [Google Scholar] [CrossRef]
- Huang, K.; Jiang, Y.; Yuan, Y.; Zhao, L. Modeling multiple humanitarian objectives in emergency response to large-scale disasters. Transp. Res. Part E Logist. Transp. Rev. 2015, 75, 1–17. [Google Scholar] [CrossRef]
- Huang, M.; Smilowitz, K.; Balcik, B. Models for relief routing: Equity, efficiency and efficacy. Transp. Res. Part E: Logist. Transp. Rev. 2012, 48, 2–18. [Google Scholar] [CrossRef]
- Lei, S.; Chen, C.; Li, Y.; Hou, Y. Resilient disaster recovery logistics of distribution systems: Co-optimize service restoration with repair crew and mobile power source dispatch. IEEE Trans. Smart Grid 2019, 10, 6187–6202. [Google Scholar] [CrossRef]
- Abdeltawab, H.H.; Mohamed, Y.A.-R.I. Mobile energy storage scheduling and operation in active distribution systems. IEEE Trans. Ind. Electron. 2017, 64, 6828–6840. [Google Scholar] [CrossRef]
- Abdulrazzaq Oraibi, W.; Mohammadi-Ivatloo, B.; Hosseini, S.H.; Abapour, M. Multi-microgrid framework for resilience enhancement considering mobile energy storage systems and parking lots. Appl. Sci. 2023, 13, 1285. [Google Scholar] [CrossRef]
- Chen, J.; Chen, C.; Duan, S. Cooperative optimization of electric vehicles and renewable energy resources in a regional multi-microgrid system. Appl. Sci. 2019, 9, 2267. [Google Scholar] [CrossRef]
- Newman, M.E.J. Fast algorithm for detecting community structure in networks. Phys. Rev. E 2004, 69, 066133. [Google Scholar] [CrossRef]
- Sui, Q.; Wei, F.; Wu, C.; Lin, X.; Li, Z. Self-sustaining of post-disaster pelagic island energy systems with mobile multi-energy storages. IEEE Trans. Smart Grid 2022, 14, 2645–2655. [Google Scholar] [CrossRef]
- Yang, D.; Wu, Y.; Pandzic, H.; Tomin, N. Fault recovery of active distribution network considering translatable load and soft open point. J. Electr. Power Sci. Technol. 2024, 39, 183–192. [Google Scholar]
- Zhou, B.; Gu, L.; Ding, Y.; Shao, L.; Wu, Z.; Yang, X.; Li, C.; Li, Z.; Wang, X.; Cao, Y.; et al. The great 2008 Chinese ice storm: Its socioeconomic–ecological impact and sustainability lessons learned. Bull. Am. Meteorol. Soc. 2011, 92, 47–60. [Google Scholar] [CrossRef]
- Jones, K.F. A simple model for freezing rain ice loads. Atmos. Res. 1998, 46, 87–97. [Google Scholar] [CrossRef]
- Yu, S.; Wei, C.; Fang, F.; Liu, M.; Chen, Y. Resilience assessment of electric-thermal energy networks considering cascading failure under ice disasters. Appl. Energy 2024, 369, 123533. [Google Scholar] [CrossRef]
- Newman, M.E.J.; Girvan, M. Finding and evaluating community structure in networks. Phys. Rev. E 2004, 69, 026113. [Google Scholar] [CrossRef]
- Girvan, M.; Newman, M.E.J. Community structure in social and biological networks. Proc. Natl. Acad. Sci. USA 2002, 99, 7821–7826. [Google Scholar] [CrossRef]
- Wu, Q.; Su, X.E.; Jiang, L.; Huang, T.; Wang, X.; Sang, Y. Integrated network partitioning and DER allocation for planning of virtual microgrids. Electr. Power Syst. Res. 2023, 216, 109024. [Google Scholar] [CrossRef]
- Borodinecs, A.; Zajecs, D.; Lebedeva, K.; Bogdanovics, R. Mobile off-grid energy generation unit for temporary energy supply. Appl. Sci. 2022, 12, 673. [Google Scholar] [CrossRef]
- Gurobi Optimization, LLC. Gurobi Optimizer Reference Manual, Version 11.0. 2024. Available online: https://www.gurobi.com/documentation/ (accessed on 10 July 2025).
- Xie, S.; Yang, Z.; Wang, M.; Xu, G.; Bai, S. Evaluating the resilience of mountainous sparse road networks in high-risk geological disaster areas: A case study in Tibet, China. Appl. Sci. 2025, 15, 2688. [Google Scholar] [CrossRef]
- Lei, S.; Chen, C.; Zhou, H.; Hou, Y. Routing and scheduling of mobile power sources for distribution system resilience enhancement. IEEE Trans. Smart Grid 2018, 10, 5650–5662. [Google Scholar] [CrossRef]
- Ren, C.; Dong, Y.; Xue, P.; Xu, W. Analysis of water supply and demand based on logistic model. IOP Conf. Ser. Earth Environ. Sci. 2019, 300, 022013. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 1 MWh | 5 tons | ||
| 1 | 1 | ||
| 0.3 | 0 | ||
| 50 yuan/kwh | 30 yuan/ton | ||
| 200 yuan | 200 yuan | ||
| 1000 yuan | 1000 yuan | ||
| 0.95 | 0.99 | ||
| 0.90 | 0.98 | ||
| 0.3 MW | 1 h |
| Electric Load Loss (yuan) | Food Load Loss (yuan) | Freshwater Load Loss (yuan) | Mobile Multi-Energy Storage Cost (yuan) | Diesel Generation Cost (yuan) | Total Cost (yuan) | |
|---|---|---|---|---|---|---|
| Case 1 | 141,300 | 25,980 | 12,000 | 1178 | 8000 | 220,458 |
| Case 2 | 225,300 | 40,920 | 9000 | 1878 | 8000 | 321,098 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pi, R.; Liu, Y.; Huang, N.; Lian, J.; Chen, X.; Yang, C. Emergency Resource Dispatch Scheme for Ice Disasters Based on Pre-Disaster Prediction and Dynamic Scheduling. Appl. Sci. 2025, 15, 8352. https://doi.org/10.3390/app15158352
Pi R, Liu Y, Huang N, Lian J, Chen X, Yang C. Emergency Resource Dispatch Scheme for Ice Disasters Based on Pre-Disaster Prediction and Dynamic Scheduling. Applied Sciences. 2025; 15(15):8352. https://doi.org/10.3390/app15158352
Chicago/Turabian StylePi, Runyi, Yuxuan Liu, Nuoxi Huang, Jianyu Lian, Xin Chen, and Chao Yang. 2025. "Emergency Resource Dispatch Scheme for Ice Disasters Based on Pre-Disaster Prediction and Dynamic Scheduling" Applied Sciences 15, no. 15: 8352. https://doi.org/10.3390/app15158352
APA StylePi, R., Liu, Y., Huang, N., Lian, J., Chen, X., & Yang, C. (2025). Emergency Resource Dispatch Scheme for Ice Disasters Based on Pre-Disaster Prediction and Dynamic Scheduling. Applied Sciences, 15(15), 8352. https://doi.org/10.3390/app15158352