
From Application-Driven Growth to Paradigm Shift: Scientific Evolution and Core Bottleneck Analysis in the Field of UAV Remote Sensing

 ,
,
Abstract
1. Introduction
- (1)
- Does quantitative evidence indicate that UAV-RS research has become predominantly driven by application demands, at the expense of investment in foundational research?
- (2)
- Within the global landscape of knowledge production, is there evidence of “technological silos” that hinder deep collaboration across institutions and across national or regional boundaries?
- (3)
- Behind the current enthusiasm for multi-source data fusion, is the lack of unified data standards and interoperability frameworks posing hidden risks to data integration?
2. Materials and Methods
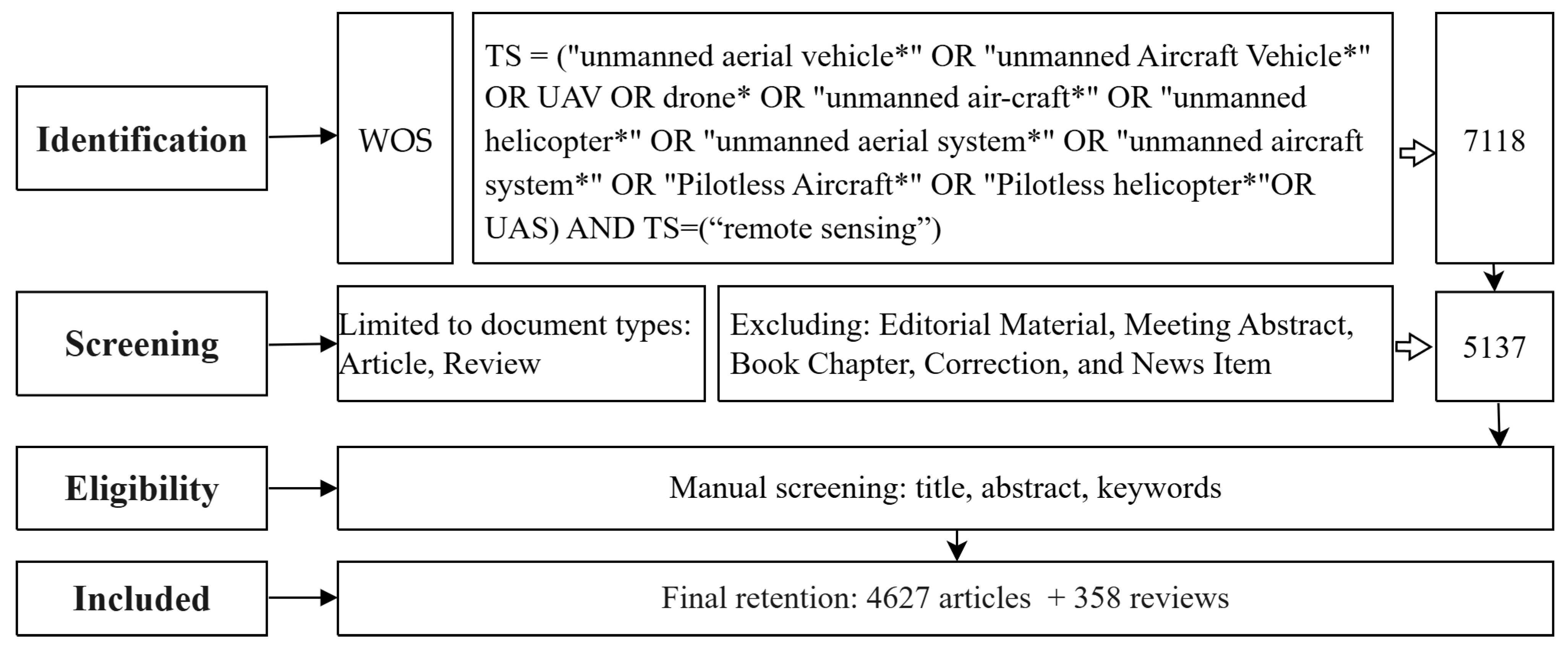
2.1. Literature Selection
2.2. Research Methods
3. Results
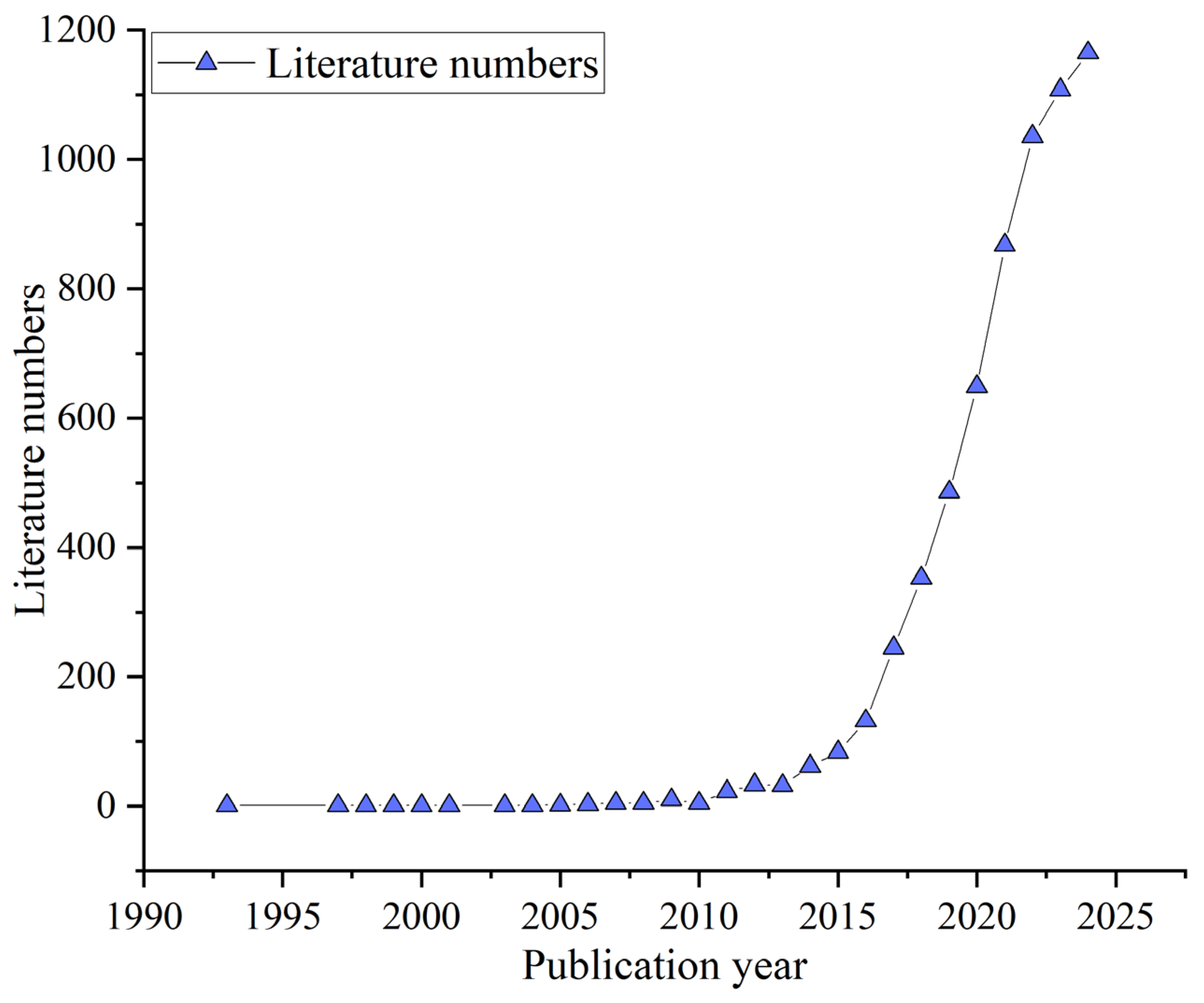
3.1. Temporal Evolution
3.2. Analysis of the Global Scientific Collaboration Network: Formation of a Dual-Core Structure
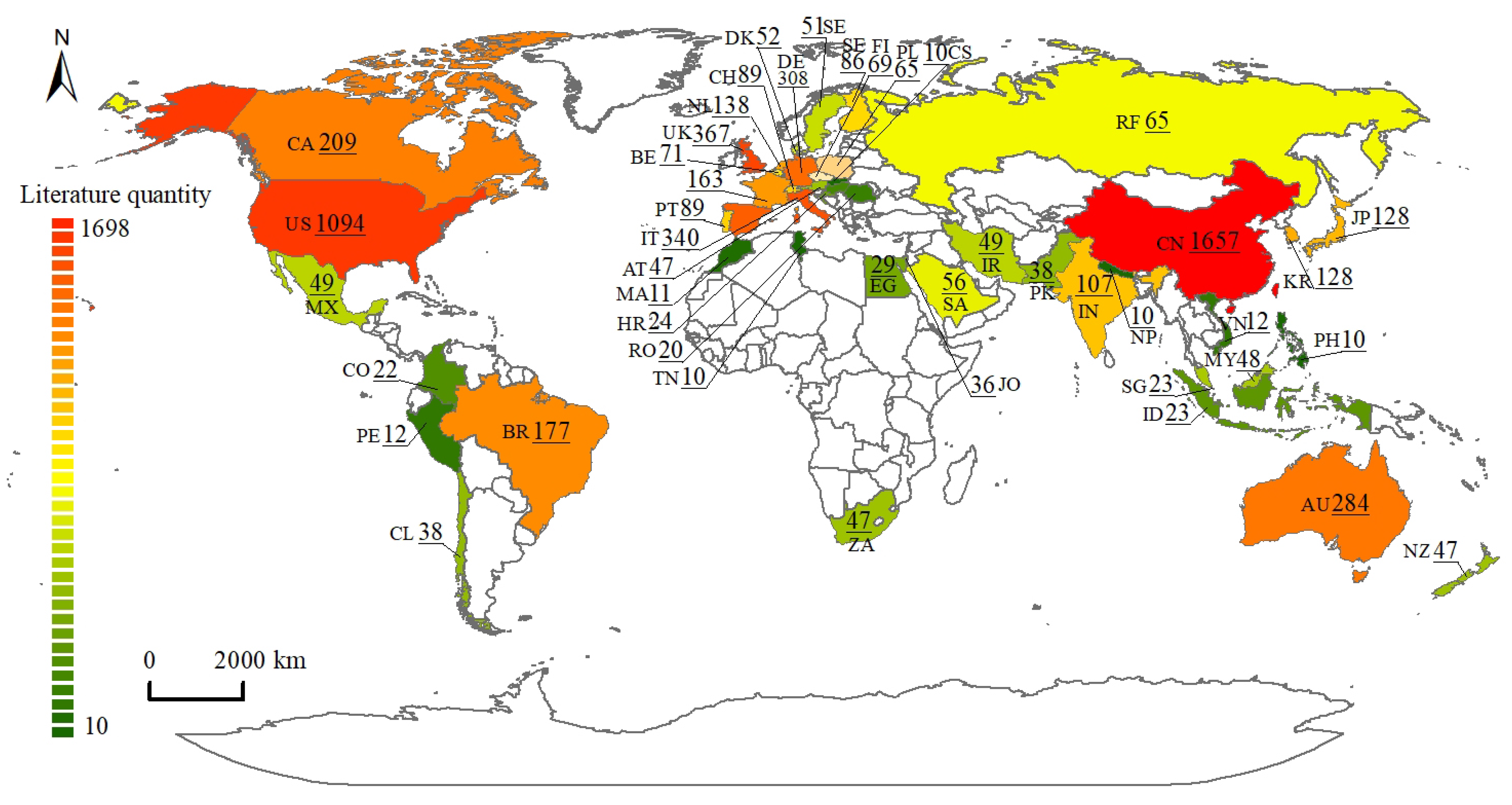
3.2.1. Global Distribution of National/Regional Research Capacities
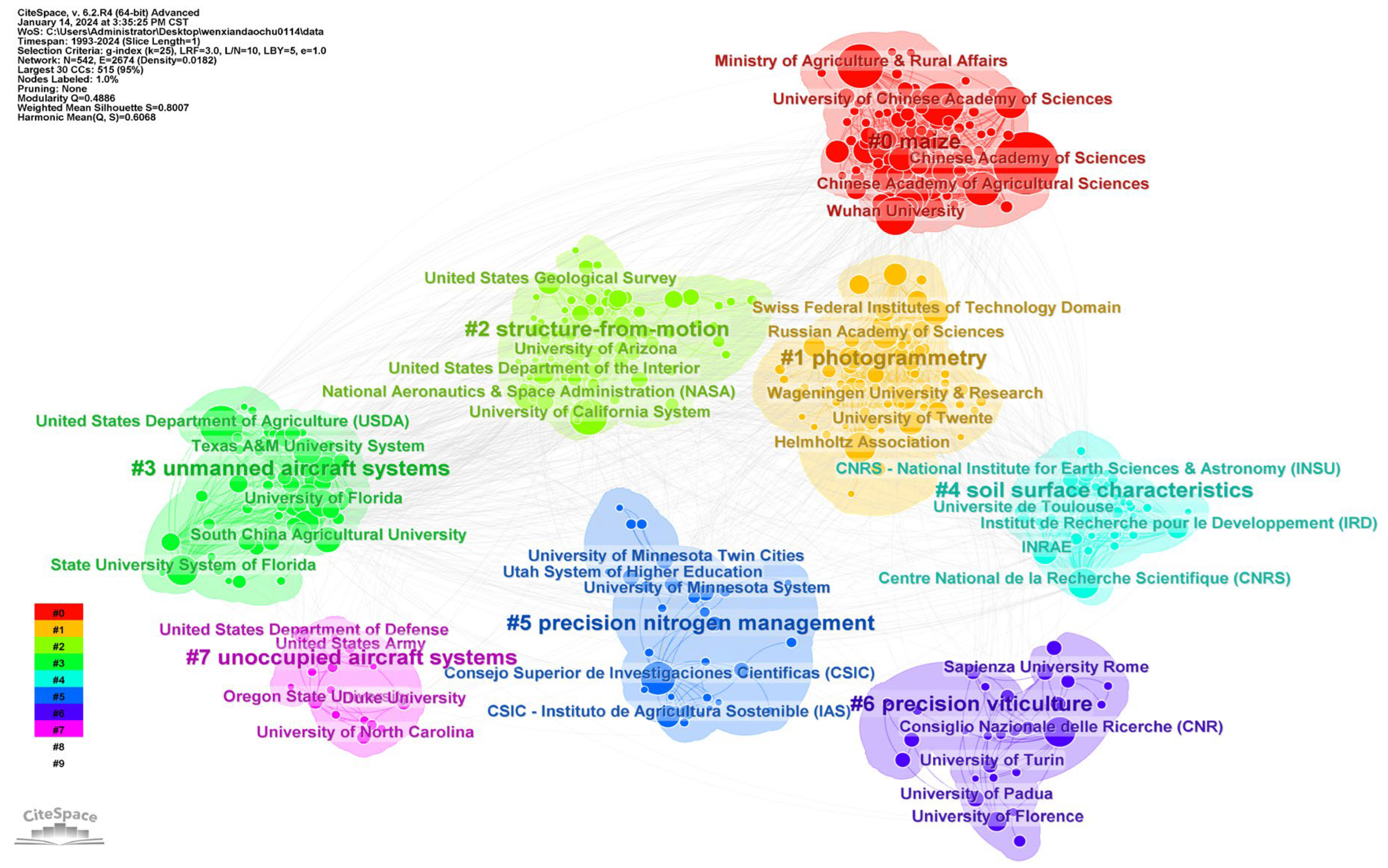
3.2.2. Institutional Cooperation
3.3. Journals and Authors
3.3.1. Journals
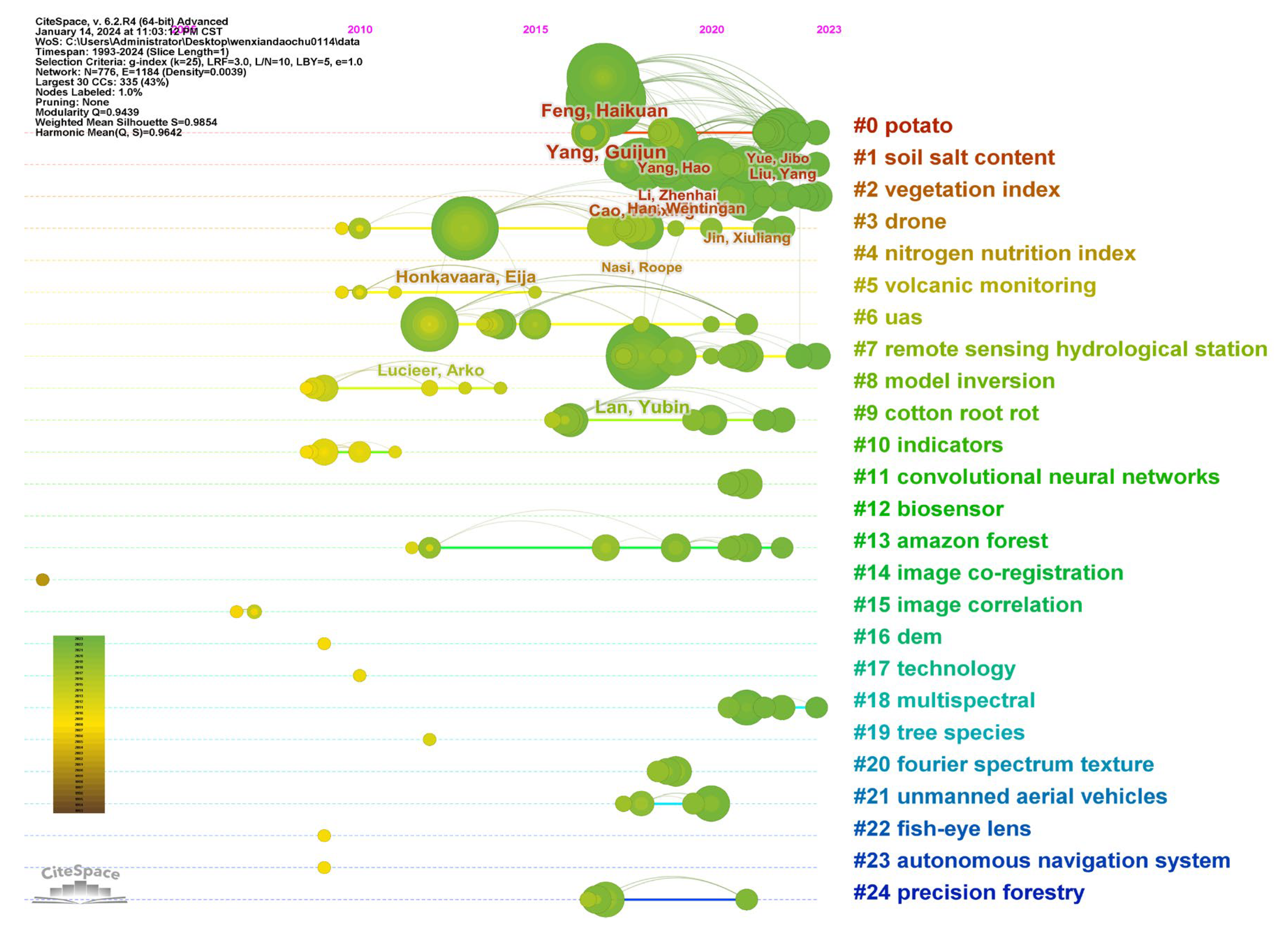
3.3.2. Authors
3.4. Analysis of Research Fields
3.4.1. Research Field and Content
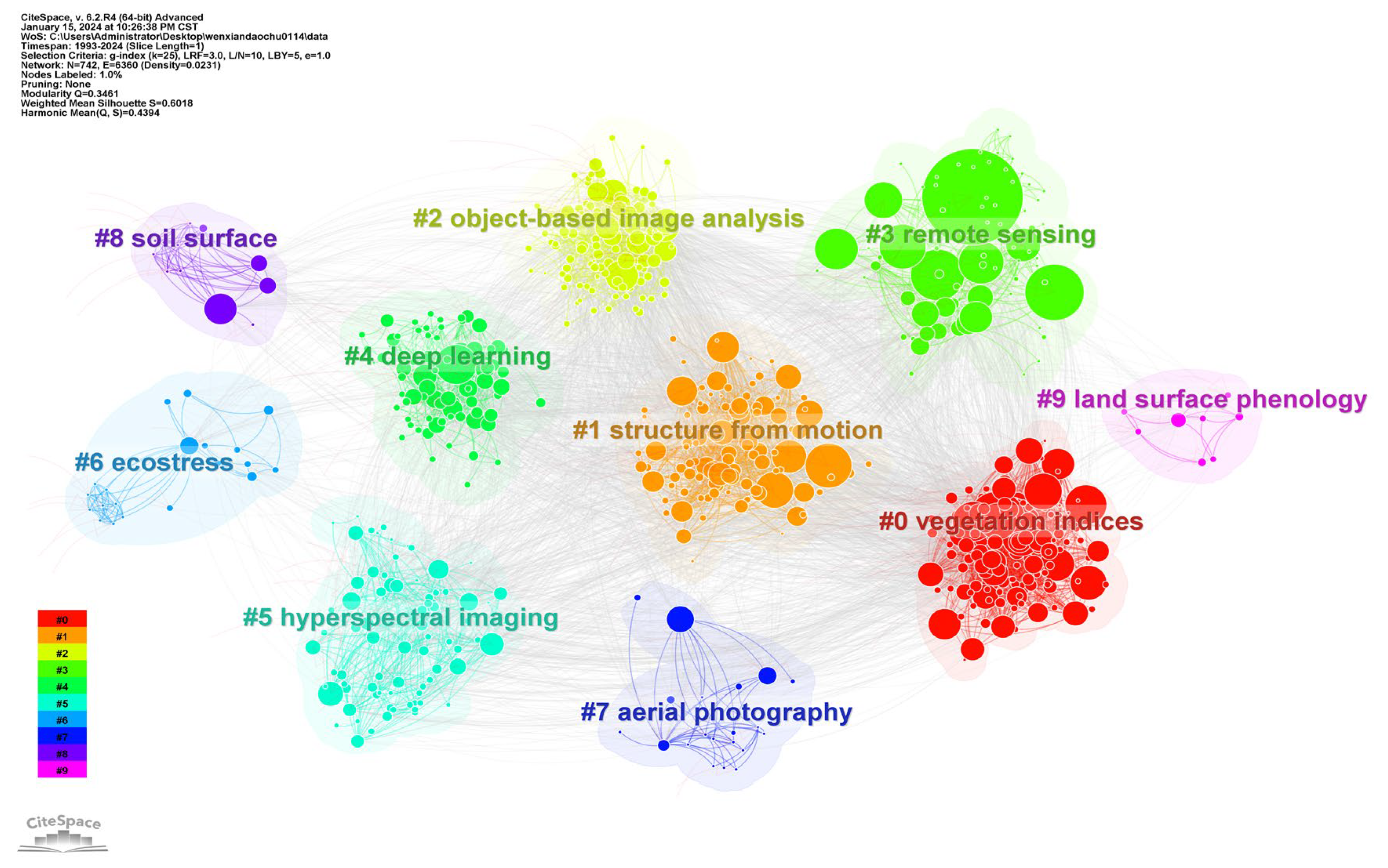
3.4.2. Keyword Co-Occurrence and Clustering Analysis
3.5. Evolution of Research Frontiers from Keyword Bursts
4. Core Insights and Critical Reflections
4.1. Evolution and Breakthroughs of Key Technologies
4.1.1. Evolution of Flight Platforms
4.1.2. Sensor Technology Innovation
4.1.3. Advancements in Flight Control and Navigation Systems
4.1.4. Intelligentization of Data Processing and Analysis Methods
4.2. Expansion and Deepening of Application Fields
4.3. Challenges Facing UAV-RS
4.3.1. Platform Performance Limitations
- (1)
- Limited Flight Time. For electric UAV platforms, most commercial and industrial-grade drones currently support flight durations of only 30–60 min, constrained by the energy density limits of existing battery technologies [166,167,168]. In large-scale or long-term monitoring tasks, the need for frequent returns to replace batteries not only slows mission progress, but also increases safety risks, especially in remote areas or under extreme weather conditions [169]. Insufficient flight time directly affects spatial coverage and mission depth [170]; for instance, when monitoring large-scale regions at high frequencies, limited endurance significantly hampers continuous observation efficiency. To address this, researchers are exploring advanced energy solutions such as lithium-sulfur batteries, hydrogen fuel cells, and hybrid power systems to improve energy density and cycle life [171,172]. Additionally, flight paths and mission planning are being optimized using genetic algorithms and reinforcement learning to maximize battery efficiency and reduce unnecessary energy consumption [173]. For example, in agricultural monitoring—such as pest infestation assessment—UAV flight routes must account for wind conditions and light availability. However, strong winds or rainy weather can prevent takeoff and landing, further exacerbating the risk of mission disruption due to limited endurance. Currently, research has evolved from single-pass, single-site monitoring to multi-pass, multi-site continuous monitoring. While this enhances monitoring frequency, it also significantly increases operational workload and charging demands [174], placing greater pressure on backend data processing workflows [175].
- (2)
- Limited Payload Capacity. High-resolution optical, multispectral, thermal infrared, and LiDAR sensors are essential for detailed surface monitoring. However, these sensors are often bulky and heavy, placing strict demands on the payload capacity of small UAVs [176]. Currently, lightweight UAVs can typically only carry basic optical cameras, making it difficult to simultaneously conduct multi-modal and multi-angle data acquisition tasks [177]. Although larger UAV platforms are capable of supporting combinations of advanced sensors (e.g., multispectral + LiDAR + thermal infrared), their high cost, operational complexity, and stricter requirements for takeoff and landing areas limit their application in urban or confined environments [176]. While modular designs have improved the flexibility of sensor replacement and integration [178], they have not fundamentally resolved the contradiction between payload capacity and energy constraints. Overall, limited payload capacity remains one of the key challenges for UAV-RS systems, especially in complex monitoring scenarios. Nonetheless, with ongoing technological advancements and improvements in UAV design, this limitation is expected to be progressively mitigated.
- (3)
- Sensor Performance Bottlenecks. The resolution, sensitivity, field of view, and spectral range of sensors directly determine the quality of remote sensing data. High-resolution sensors can capture individual plants or subtle thermal anomalies, but they often require higher sampling rates and larger data bandwidths, posing challenges for UAV endurance and onboard storage capacity [179,180,181,182]. Infrared and thermal imaging are indispensable for applications like wildfire monitoring, but typically have lower spatial resolution than visible-spectrum imaging and are more susceptible to interference from clouds and fog [183,184]. Moreover, the trade-off between field of view and resolution makes it difficult for operators to balance coverage area with detail acquisition, increasing the complexity of flight path design and operational costs. While current technologies face limitations in resolution, viewing angle, and sensitivity, ongoing advances in sensor development and UAV payload capacity are expected to enable future remote sensing missions to collect multi-dimensional environmental data with greater efficiency and precision.
- (4)
- Limited Data Transmission Rates. In applications such as real-time monitoring and emergency response, UAVs are required to transmit large volumes of high-definition imagery, multispectral data, and video streams back to ground stations or cloud platforms promptly. While current Wi-Fi and 4G networks can support basic data transfer in urban areas, they often fail to meet bandwidth requirements in remote or low-signal regions [185,186], forcing UAVs to store data onboard and upload it only after returning, resulting in significant latency. Although satellite communication and enhanced wireless transmission technologies can offer broader coverage in harsh environments [187], their high costs and limited accessibility hinder widespread adoption. However, the advancement of 5G and next-generation satellite networks, along with improvements in onboard AI edge computing, is expected to enable real-time preprocessing and compression on UAV platforms, thereby alleviating the burden of large-scale data transmission in the future.
4.3.2. Data Processing and Analysis Challenges
4.4. Constraints of Policies, Regulations, and Standardization Systems
4.5. Regional Development Imbalance and Barriers to Technology Transfer
4.6. Critical Commentary
4.6.1. Double-Edged Sword of Application-Driven Development: The Risk of Technological Stagnation Behind the Boom
- (1)
- Persistent platform bottlenecks: Issues such as “endurance” and “battery life”—core limitations affecting UAV performance—have never emerged as prominent in burst keyword analysis, indicating a disconnect between academic priorities and industrial pain points. Yet, numerous technical reports and review papers have repeatedly emphasized endurance as the key constraint on large-scale, long-term UAV-RS applications [133].
- (2)
- Surface-level AI adoption: Although deep learning remains a trending topic, most high-frequency terms refer to the direct adoption of established computer vision models like YOLO and U-Net. There is a notable absence of original AI architectures tailored to the unique characteristics of remote sensing data, such as spatial context or multimodal inputs. This signals a risk of “imported convenience” taking precedence over “remote sensing-native” innovation, which may lead to homogenized applications and diminished technological differentiation [224,225].
4.6.2. Data Integration Potential Risks: The Overlooked Foundation of Interoperability
4.6.3. The Imbalanced Cost–Benefit Equation: SfM’s Dominance over LiDAR
4.6.4. Challenges in the Global Collaboration Landscape: From Technological Silos to Global Synergy
5. Research Gaps and Prospects
5.1. Data Ecosystem Development: From Ad Hoc Integration to a Standardized Data Framework
5.2. Breakthroughs in Core Technology Platforms: Integration of Intelligent Flight Platforms and Edge Computing
5.3. High-Precision 3D Reconstruction and Dynamic Phenological Monitoring
5.4. Applied Ethics and Global Collaboration
6. Conclusions
- (1)
- Since 2015, UAV-RS research has entered a phase of rapid growth. Research priorities have expanded from early focuses such as image acquisition and platform performance to more advanced areas, including multi-source data fusion, deep learning–based interpretation, 3D modeling, and real-time monitoring—reflecting a paradigm shift from “image acquisition” to “intelligent sensing.” The field is highly interdisciplinary, encompassing remote sensing, environmental science, geographic information systems (GIS), engineering, and agricultural sciences. Keyword clustering analysis highlights prominent research hotspots such as vegetation indices, 3D modeling, image recognition, deep learning, and ecological stress, characterized by a high degree of technological integration and application-driven development.
- (2)
- A key finding of this study is that while the UAV-RS field is experiencing exponential growth, it is also facing three major structural imbalances:
- ①
- A dual-core but weakly coupled global collaboration structure: China and the United States are the two major innovation hubs, yet direct cooperation between them remains limited, raising concerns about the formation of technological silos. We suggest fostering innovative collaboration models, such as: establishing multilateral alliances centered on global challenges (e.g., climate change, biodiversity, food security); creating unified data-sharing protocols and interoperability standards; initiating cross-border mobility programs for early-career researchers and joint field observation projects to promote knowledge exchange and methodological synergy.
- ②
- An application-heavy, foundation-light research pattern: The academic agenda is heavily skewed toward immediate application needs—such as precision agriculture—while foundational technologies critical for long-term development, including endurance, sensor calibration, and data standardization, are comparatively neglected. We recommend that research funding agencies rebalance priorities and support key technological directions such as: high-efficiency power systems (e.g., fuel cells, hybrid UAVs); ultralight, high-resolution multi-sensor integration (e.g., LiDAR + hyperspectral); AI-enhanced autonomous navigation and flight planning; and lightweight real-time processing architectures for edge applications. Long-term investment is also needed in open-source toolchains, multi-environment test platforms, and interdisciplinary research infrastructures to avoid shallow innovation and redundant development.
- ③
- A cognitive gap in the data ecosystem: Although researchers show strong interest in multi-source data fusion, there is a systemic neglect of the necessary data standards and interoperability frameworks. We recommend that international remote sensing standardization bodies (e.g., OGC, ISO/TC 211) take the lead in developing open standards covering sensor calibration, spatial accuracy, and data exchange formats.
- (3)
- The unique contribution of this study lies in advancing scientometric analysis from a descriptive inquiry of “what is” to a diagnostic critique of “why it matters.” Through quantitative evidence, this study reveals the overwhelming dominance of application-driven research, the hidden impact of cost-effectiveness on technology adoption (e.g., SfM vs. LiDAR), and the notable absence of critical discourse around data standards and interoperability in the literature. This diagnostic approach highlights both the prosperity and the potential risks embedded within the current research paradigm, offering a critical perspective for understanding the future trajectory of UAV and remote sensing technologies.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Country/Region | Abbreviation |
| AU | Australia |
| AT | Austria |
| BE | Belgium |
| BR | Brazil |
| CA | Canada |
| CL | Chile |
| CN | China |
| CO | Colombia |
| CS | Czechoslovakia |
| DK | Denmark |
| EG | Egypt |
| FI | Finland |
| DE | Germany |
| IN | India |
| ID | Indonesia |
| IR | Iran |
| IT | Italy |
| JA | Japan |
| JO | Jordan |
| KR | Korea (South) |
| MY | Malaysia |
| MX | Mexico |
| MA | Morocco |
| NE | Nepal |
| NL | Netherlands |
| NZ | New Zealand |
| PK | Pakistan |
| PE | Peru |
| PH | Philippines |
| PL | Poland |
| PT | Portugal |
| HR | Republika Hrvatska |
| RO | Romania |
| RF | Russian Federation |
| SA | Saudi Arabia |
| SG | Singapore |
| ZA | South Africa |
| SE | Sweden |
| CH | Switzerland |
| TN | Tunisia |
| UK | United Kingdom |
| US | United States |
| VN | Vietnam |
References
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Li, D.; Li, M. Research advance and application prospect of unmannedaerial vehicle remote sensing system. Geomat. Inf. Sci. Wuhan Univ. 2014, 39, 505–513. [Google Scholar]
- Maes, W.H.; Steppe, K. Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef]
- Meivel, S.; Maheswari, S. Remote sensing analysis of agricultural drone. J. Indian Soc. Remote Sens. 2021, 49, 689–701. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G. On the use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- Kucharczyk, M.; Hugenholtz, C.H. Remote sensing of natural hazard-related disasters with small drones: Global trends, biases, and research opportunities. Remote Sens. Environ. 2021, 264, 112577. [Google Scholar] [CrossRef]
- Wellmann, T.; Lausch, A.; Andersson, E.; Knapp, S.; Cortinovis, C.; Jache, J.; Scheuer, S.; Kremer, P.; Mascarenhas, A.; Kraemer, R. Remote sensing in urban planning: Contributions towards ecologically sound policies? Landsc. Urban Plan. 2020, 204, 103921. [Google Scholar] [CrossRef]
- Yang, Z.; Yu, X.; Dedman, S.; Rosso, M.; Zhu, J.; Yang, J.; Xia, Y.; Tian, Y.; Zhang, G.; Wang, J. UAV remote sensing applications in marine monitoring: Knowledge visualization and review. Sci. Total Environ. 2022, 838, 155939. [Google Scholar] [CrossRef]
- Tilon, S.; Nex, F.; Vosselman, G.; Sevilla de la Llave, I.; Kerle, N. Towards improved unmanned aerial vehicle edge intelligence: A road infrastructure monitoring case study. Remote Sens. 2022, 14, 4008. [Google Scholar] [CrossRef]
- Miller, I.J.; Schieber, B.; De Bey, Z.; Benner, E.; Ortiz, J.D.; Girdner, J.; Patel, P.; Coradazzi, D.G.; Henriques, J.; Forsyth, J. Analyzing crop health in vineyards through a multispectral imaging and drone system. In Proceedings of the 2020 Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 24 April 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–5. [Google Scholar]
- Webb, H.; Barnes, N.; Powell, S.; Jones, C. Does drone remote sensing accurately estimate soil pH in a spring wheat field in southwest Montana? Precis. Agric. 2021, 22, 1803–1815. [Google Scholar] [CrossRef]
- Guofeng, Y.; Yong, H.; Xuping, F.; Xiyao, L.; Jinnuo, Z.; Zeyu, Y. Methods and new research progress of remote sensing monitoring of crop disease and pest stress using unmanned aerial vehicle. Smart Agric. 2022, 4, 1–16. [Google Scholar]
- Näsi, R. Drone-Based Spectral and 3D Remote Sensing Applications for Forestry and Agriculture. Ph.D. Thesis, Aalto University, Espoo, Finland, December 2021. [Google Scholar]
- Dronova, I.; Kislik, C.; Dinh, Z.; Kelly, M. A Review of Unoccupied Aerial Vehicle Use in Wetland Applications: Emerging Opportunities in Approach, Technology, and Data. Drones 2021, 5, 45. [Google Scholar] [CrossRef]
- Mishra, V.; Avtar, R.; Prathiba, A.; Mishra, P.K.; Tiwari, A.; Sharma, S.K.; Singh, C.H.; Chandra Yadav, B.; Jain, K. Uncrewed aerial systems in water resource management and monitoring: A review of sensors, applications, software, and issues. Adv. Civ. Eng. 2023, 2023, 3544724. [Google Scholar] [CrossRef]
- Alawad, W.; Halima, N.B.; Aziz, L. An unmanned aerial vehicle (uav) system for disaster and crisis management in smart cities. Electronics 2023, 12, 1051. [Google Scholar] [CrossRef]
- Giang, T.L.; Dang, K.B.; Le, Q.T.; Nguyen, V.G.; Tong, S.S.; Pham, V.-M. U-Net convolutional networks for mining land cover classification based on high-resolution UAV imagery. Ieee Access 2020, 8, 186257–186273. [Google Scholar] [CrossRef]
- Olivatto, T.F.; Inguaggiato, F.F.; Stanganini, F.N. Urban mapping and impacts assessment in a Brazilian irregular settlement using UAV-based imaging. Remote Sens. Appl. Soc. Environ. 2023, 29, 100911. [Google Scholar] [CrossRef]
- Naranjo, M.; Fuentes, D.; Muelas, E.; Diez, E.; Ciruelo, L.; Alonso, C.; Abenza, E.; Gómez-Espinosa, R.; Luengo, I. Object detection-based system for traffic signs on drone-captured images. Drones 2023, 7, 112. [Google Scholar] [CrossRef]
- Ngwenya, N.; Bangira, T.; Sibanda, M.; Kebede Gurmessa, S.; Mabhaudhi, T. UAV-based remote sensing of chlorophyll-a concentrations in inland water bodies: A systematic review. Geocarto Int. 2025, 40, 2452246. [Google Scholar] [CrossRef]
- Samadzadegan, F.; Toosi, A.; Dadrass Javan, F. A critical review on multi-sensor and multi-platform remote sensing data fusion approaches: Current status and prospects. Int. J. Remote Sens. 2025, 46, 1327–1402. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned aerial vehicle for remote sensing applications—A review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhu, L. A review on unmanned aerial vehicle remote sensing: Platforms, sensors, data processing methods, and applications. Drones 2023, 7, 398. [Google Scholar] [CrossRef]
- Wei, Z.; Zhu, M.; Zhang, N.; Wang, L.; Zou, Y.; Meng, Z.; Wu, H.; Feng, Z. UAV-assisted data collection for Internet of Things: A survey. IEEE Internet Things J. 2022, 9, 15460–15483. [Google Scholar] [CrossRef]
- Messinger, M.; Silman, M. Unmanned aerial vehicles for the assessment and monitoring of environmental contamination: An example from coal ash spills. Environ. Pollut. 2016, 218, 889–894. [Google Scholar] [CrossRef]
- Grenzdörffer, G.; Engel, A.; Teichert, B. The photogrammetric potential of low-cost UAVs in forestry and agriculture. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 31, 1207–1214. [Google Scholar]
- Cuaran, J.; Leon, J. Crop monitoring using unmanned aerial vehicles: A review. Agric. Rev. 2021, 42, 121–132. [Google Scholar] [CrossRef]
- Eugenio, F.C.; Schons, C.T.; Mallmann, C.L.; Schuh, M.S.; Fernandes, P.; Badin, T.L. Remotely piloted aircraft systems and forests: A global state of the art and future challenges. Can. J. For. Res. 2020, 50, 705–716. [Google Scholar] [CrossRef]
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Themistocleous, K.; Agapiou, A.; Cuca, B.; Hadjimitsis, D.G. Unmanned aerial systems and spectroscopy for remote sensing applications in archaeology. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 1419–1423. [Google Scholar] [CrossRef]
- Gomez, C.; Purdie, H. UAV-based photogrammetry and geocomputing for hazards and disaster risk monitoring–a review. Geoenviron. Disasters 2016, 3, 23. [Google Scholar] [CrossRef]
- Lyu, X.; Li, X.; Dang, D.; Dou, H.; Wang, K.; Lou, A. Unmanned aerial vehicle (UAV) remote sensing in grassland ecosystem monitoring: A systematic review. Remote Sens. 2022, 14, 1096. [Google Scholar] [CrossRef]
- Corcoran, E.; Winsen, M.; Sudholz, A.; Hamilton, G. Automated detection of wildlife using drones: Synthesis, opportunities and constraints. Methods Ecol. Evol. 2021, 12, 1103–1114. [Google Scholar] [CrossRef]
- Ecke, S.; Dempewolf, J.; Frey, J.; Schwaller, A.; Endres, E.; Klemmt, H.-J.; Tiede, D.; Seifert, T. UAV-based forest health monitoring: A systematic review. Remote Sens. 2022, 14, 3205. [Google Scholar] [CrossRef]
- Osco, L.P.; Junior, J.M.; Ramos, A.P.M.; de Castro Jorge, L.A.; Fatholahi, S.N.; de Andrade Silva, J.; Matsubara, E.T.; Pistori, H.; Gonçalves, W.N.; Li, J. A review on deep learning in UAV remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102456. [Google Scholar] [CrossRef]
- Mingers, J.; Leydesdorff, L. A review of theory and practice in scientometrics. Eur. J. Oper. Res. 2015, 246, 1–19. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, C.; Liu, Z.; Hu, Z.; Wang, X. The methodology function of CiteSpace mapping knowledge domains. Stud. Sci. Sci. 2015, 33, 242–253. [Google Scholar]
- Chen, C. The citespace manual. Coll. Comput. Inform. 2014, 1, 1–84. [Google Scholar]
- Chen, C. CiteSpace II: Detecting and visualizing emerging trends and transient patterns in scientific literature. J. Am. Soc. Inf. Sci. Technol. 2006, 57, 359–377. [Google Scholar] [CrossRef]
- Guo, Q.; Yao, P.J. Bibliometric review of carbon peak with CiteSpace: Evolution, trends, and framework. Environ. Sci. Pollut. Res. 2024, 31, 13592–13608. [Google Scholar] [CrossRef]
- Yu, Y.H.; Shen, Y.Z.; Liu, Y.Y.; Wei, Y.C.; Rui, X.D.; Li, B.B. Knowledge mapping and trends in research on remote sensing change detection using CiteSpace analysis. Earth Sci. Inform. 2023, 16, 787–801. [Google Scholar] [CrossRef]
- Liu, Y.W.; Cao, X.S.; Li, T. Influence of Accessibility on Land Use and Landscape Pattern Based on Mapping Knowledge Domains: Review and Implications. J. Adv. Transp. 2020, 2020, 7985719. [Google Scholar] [CrossRef]
- Guo, Q.; Hu, T.; Liu, J.; Jin, S.; Xiao, Q.; Yang, G.; Gao, X.; Xu, Q.; Xie, P.; Peng, Z. Advances in light weight unmanned aerial vehicle remote sensing and major industrial applications. Prog. Geogr. 2021, 40, 1550–1569. [Google Scholar] [CrossRef]
- Huang, D.; Zhou, Z.; Zhang, Z.; Zhu, M.; Yin, L.; Peng, R.; Zhang, Y.; Zhang, W. Recognition and counting of pitaya trees in karst mountain environment based on unmanned aerial vehicle RGB images. J. Appl. Remote Sens. 2021, 15, 42402. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, Z.; Huang, D.; Zhang, T.; Zhang, W. Identifying and Counting Tobacco Plants in Fragmented Terrains Based on Unmanned Aerial Vehicle Images in Beipanjiang, China. Sustainability 2022, 14, 8151. [Google Scholar] [CrossRef]
- Huang, D.; Zhou, Z.; Zhang, Z.; Zhu, M.; Peng, R.; Zhang, Y.; Li, Q.; Xiao, D.; Hu, L. Extraction of agricultural plastic film mulching in karst fragmented arable lands based on unmanned aerial vehicle visible light remote sensing. J. Appl. Remote Sens. 2022, 16, 36511. [Google Scholar] [CrossRef]
- Xu, C.; Liao, X.; Tan, J.; Ye, H.; Lu, H. Recent research progress of unmanned aerial vehicle regulation policies and technologies in urban low altitude. IEEE Access 2020, 8, 74175–74194. [Google Scholar] [CrossRef]
- Feng, Q.; Liu, J.; Gong, J. Urban flood mapping based on unmanned aerial vehicle remote sensing and random forest classifier—A case of Yuyao, China. Water 2015, 7, 1437–1455. [Google Scholar] [CrossRef]
- Wang, T.; Mei, X.; Thomasson, J.A.; Han, X.; Yadav, P.K. Volunteer cotton habitat prediction model and detection with UAV remote sensing. In Proceedings of the 2020 ASABE Annual International Virtual Meeting, Online, 13–15 July 2020; p. 1. [Google Scholar]
- Munawar, H.S.; Ullah, F.; Qayyum, S.; Khan, S.I.; Mojtahedi, M. UAVs in disaster management: Application of integrated aerial imagery and convolutional neural network for flood detection. Sustainability 2021, 13, 7547. [Google Scholar] [CrossRef]
- Wang, T.; Thomasson, J.A.; Yang, C.; Isakeit, T.; Nichols, R.L. Automatic classification of cotton root rot disease based on UAV remote sensing. Remote Sens. 2020, 12, 1310. [Google Scholar] [CrossRef]
- Preston, T.M.; Wildhaber, M.L.; Green, N.S.; Albers, J.L.; Debenedetto, G.P. Enumerating white-tailed deer using unmanned aerial vehicles. Wildl. Soc. Bull. 2021, 45, 97–108. [Google Scholar] [CrossRef]
- Wu, W.; Qurishee, M.A.; Owino, J.; Fomunung, I.; Onyango, M.; Atolagbe, B. Coupling deep learning and UAV for infrastructure condition assessment automation. In Proceedings of the 2018 IEEE International Smart Cities Conference (ISC2), Kansas City, MO, USA, 16–19 September 2018; pp. 1–7. [Google Scholar]
- Mohd Noor, N.; Abdullah, A.; Hashim, M. Remote sensing UAV/drones and its applications for urban areas: A review. IOP Conf. Ser. Earth Environ. Sci. 2018, 169, 012003. [Google Scholar] [CrossRef]
- Baker, C.A.; Rapp, R.R.; Elwakil, E.; Zhang, J. Infrastructure assessment post-disaster: Remotely sensing bridge structural damage by unmanned aerial vehicle in low-light conditions. J. Emerg. Manag. 2020, 18, 27–41. [Google Scholar] [CrossRef] [PubMed]
- Samiappan, S.; Hathcock, L.; Turnage, G.; McCraine, C.; Pitchford, J.; Moorhead, R. Remote sensing of wildfire using a small unmanned aerial system: Post-fire mapping, vegetation recovery and damage analysis in Grand Bay, Mississippi/Alabama, USA. Drones 2019, 3, 43. [Google Scholar] [CrossRef]
- Belmonte, A.; Sankey, T.; Biederman, J.A.; Bradford, J.; Goetz, S.J.; Kolb, T.; Woolley, T. UAV-derived estimates of forest structure to inform ponderosa pine forest restoration. Remote Sens. Ecol. Conserv. 2020, 6, 181–197. [Google Scholar] [CrossRef]
- Zhang, C.; Deng, K.; Yan, D.; Mao, J.; Yang, X. Research on Multi-Source Image Fusion Technology in the Digital Reconstruction of Classical Garden and Ancient Buildings. Int. Rev. Spat. Plan. Sustain. Dev. 2023, 11, 116–131. [Google Scholar] [CrossRef]
- Jiang, X.; Gao, Z.; Shang, W.; Chen, M. Monitoring of polluted water in coastal zone using unmanned aerial vehicle remote sensing. In Proceedings of the SPIE Optical Engineering+Applications, San Diego, CA, USA, 19–23 August 2018; Remote Sensing and Modeling of Ecosystems for Sustainability XV. SPIE: Bellingham, WA, USA, 2018; Volume 10767, pp. 269–276. [Google Scholar]
- Guo, X.; Shao, Q.; Li, Y.; Wang, Y.; Wang, D.; Liu, J.; Fan, J.; Yang, F. Application of UAV remote sensing for a population census of large wild herbivores—Taking the headwater region of the Yellow River as an example. Remote Sens. 2018, 10, 1041. [Google Scholar] [CrossRef]
- Zhou, P.; Sun, Z.; Zhang, X.; Wang, Y. A framework for precisely thinning planning in a managed pure Chinese fir forest based on UAV remote sensing. Sci. Total Environ. 2023, 860, 160482. [Google Scholar] [CrossRef]
- Xiao, D.; Zhou, Z.; Li, Q.; Huang, D.; Meng, Z.; Zhang, Y. Construction of terrain information extraction model in the karst mountainous terrain fragmentation area based on UAV remote sensing. In Proceedings of the 2022 3rd International Conference on Geology, Mapping and Remote Sensing (ICGMRS), Zhoushan, China, 22–24 April 2022; pp. 716–727. [Google Scholar]
- Hegarty-Craver, M.; Polly, J.; O’Neil, M.; Ujeneza, N.; Rineer, J.; Beach, R.H.; Lapidus, D.; Temple, D.S. Remote crop mapping at scale: Using satellite imagery and UAV-acquired data as ground truth. Remote Sens. 2020, 12, 1984. [Google Scholar] [CrossRef]
- Su, J.; Yi, D.; Coombes, M.; Liu, C.; Zhai, X.; McDonald-Maier, K.; Chen, W.-H. Spectral analysis and mapping of blackgrass weed by leveraging machine learning and UAV multispectral imagery. Comput. Electron. Agric. 2022, 192, 106621. [Google Scholar] [CrossRef]
- Lim, M.; Dunning, S.A.; Burke, M.; King, H.; King, N. Quantification and implications of change in organic carbon bearing coastal dune cliffs: A multiscale analysis from the Northumberland coast, UK. Remote Sens. Environ. 2015, 163, 1–12. [Google Scholar] [CrossRef]
- Masson-MacLean, E.; O’Driscoll, J.; McIver, C.; Noble, G. Digitally recording excavations on a budget: A (low-cost) DIY approach from Scotland. J. Field Archaeol. 2021, 46, 595–613. [Google Scholar] [CrossRef]
- Mohamed, N.; Al-Jaroodi, J.; Jawhar, I.; Idries, A.; Mohammed, F. Unmanned aerial vehicles applications in future smart cities. Technol. Forecast. Soc. Change 2020, 153, 119293. [Google Scholar] [CrossRef]
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, aircraft and satellite remote sensing platforms for precision viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef]
- Calantropio, A.; Chiabrando, F.; Sammartano, G.; Spanò, A.; Teppati Losè, L. UAV strategies validation and remote sensing data for damage assessment in post-disaster scenarios. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 121–128. [Google Scholar] [CrossRef]
- Adami, A.; Fregonese, L.; Gallo, M.; Helder, J.; Pepe, M.; Treccani, D. Ultra light UAV systems for the metrical documentation of cultural heritage: Applications for architecture and archaeology. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 15–21. [Google Scholar] [CrossRef]
- Gaspari, F.; Ioli, F.; Barbieri, F.; Belcore, E.; Pinto, L. Integration of UAV-lidar and UAV-photogrammetry for infrastructure monitoring and bridge assessment. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 43, 995–1002. [Google Scholar] [CrossRef]
- Bagaram, M.B.; Giuliarelli, D.; Chirici, G.; Giannetti, F.; Barbati, A. UAV remote sensing for biodiversity monitoring: Are forest canopy gaps good covariates? Remote Sens. 2018, 10, 1397. [Google Scholar] [CrossRef]
- Favalli, M.; Fornaciai, A.; Nannipieri, L.; Harris, A.; Calvari, S.; Lormand, C. UAV-based remote sensing surveys of lava flow fields: A case study from Etna’s 1974 channel-fed lava flows. Bull. Volcanol. 2018, 80, 29. [Google Scholar] [CrossRef]
- Willkomm, M.; Bolten, A.; Bareth, G. Non-destructive monitoring of rice by hyperspectral in-field spectrometry and UAV-based remote sensing: Case study of field-grown rice in North Rhine-Westphalia, Germany. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 1071–1077. [Google Scholar] [CrossRef]
- Heine, I.; Riembauer, G.; Hovenbitzer, M. Trends in Satellite-Based Crisis Management in Germany. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 7236–7238. [Google Scholar]
- Albeaino, G.; Gheisari, M.; Franz, B.W. A systematic review of unmanned aerial vehicle application areas and technologies in the AEC domain. J. Inf. Technol. Constr. 2019, 24, 381–405. [Google Scholar]
- Jackisch, R. Drone-based surveys of mineral deposits. Nat. Rev. Earth Environ. 2020, 1, 187. [Google Scholar] [CrossRef]
- Schiefer, F.; Kattenborn, T.; Frick, A.; Frey, J.; Schall, P.; Koch, B.; Schmidtlein, S. Mapping forest tree species in high resolution UAV-based RGB-imagery by means of convolutional neural networks. ISPRS J. Photogramm. Remote Sens. 2020, 170, 205–215. [Google Scholar] [CrossRef]
- Ventura, D.; Bonifazi, A.; Gravina, M.F.; Ardizzone, G.D. Unmanned aerial systems (UASs) for environmental monitoring: A review with applications in coastal habitats. In Aerial Robots—Aerodynamics, Control and Applications; InTech: Houston, TX, USA, 2017; pp. 165–184. [Google Scholar] [CrossRef]
- Navarro, A.; Young, M.; Allan, B.; Carnell, P.; Macreadie, P.; Ierodiaconou, D. The application of Unmanned Aerial Vehicles (UAVs) to estimate above-ground biomass of mangrove ecosystems. Remote Sens. Environ. 2020, 242, 111747. [Google Scholar] [CrossRef]
- Sofonia, J.; Phinn, S.; Roelfsema, C.; Kendoul, F. Observing geomorphological change on an evolving coastal sand dune using SLAM-based UAV LiDAR. Remote Sens. Earth Syst. Sci. 2019, 2, 273–291. [Google Scholar] [CrossRef]
- Vanegas, F.; Bratanov, D.; Powell, K.; Weiss, J.; Gonzalez, F. A novel methodology for improving plant pest surveillance in vineyards and crops using UAV-based hyperspectral and spatial data. Sensors 2018, 18, 260. [Google Scholar] [CrossRef] [PubMed]
- McKenna, P.; Erskine, P.D.; Lechner, A.M.; Phinn, S. Measuring fire severity using UAV imagery in semi-arid central Queensland, Australia. Int. J. Remote Sens. 2017, 38, 4244–4264. [Google Scholar] [CrossRef]
- Krenz, J.; Greenwood, P.; Kuhn, N.J. Soil degradation mapping in drylands using Unmanned Aerial Vehicle (UAV) data. Soil Syst. 2019, 3, 33. [Google Scholar] [CrossRef]
- Clark, D.G.; Ford, J.D.; Tabish, T. What role can unmanned aerial vehicles play in emergency response in the Arctic: A case study from Canada. PLoS One 2018, 13, e0205299. [Google Scholar] [CrossRef]
- Pluer, E.M.; Robinson, D.; Meinen, B.; Macrae, M. Pairing soil sampling with very-high resolution UAV imagery: An examination of drivers of soil and nutrient movement and agricultural productivity in southern Ontario. Geoderma 2020, 379, 114630. [Google Scholar] [CrossRef]
- Fan, J.; Saadeghvaziri, M.A. Applications of drones in infrastructures: Challenges and opportunities. Int. J. Mech. Mechatron. Eng. 2019, 13, 649–655. [Google Scholar]
- Williamson, J.; Nicu, I.C. Photogrammetric Measurement of Erosion at the Sabbath Point Beothuk Site in Central Newfoundland, Canada. Sustainability 2020, 12, 7555. [Google Scholar] [CrossRef]
- Chrétien, L.-P.; Théau, J.; Menard, P. Wildlife multispecies remote sensing using visible and thermal infrared imagery acquired from an unmanned aerial vehicle (UAV). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 241–248. [Google Scholar] [CrossRef]
- Chadwick, A.J.; Goodbody, T.R.; Coops, N.C.; Hervieux, A.; Bater, C.W.; Martens, L.A.; White, B.; Röeser, D. Automatic delineation and height measurement of regenerating conifer crowns under leaf-off conditions using uav imagery. Remote Sens. 2020, 12, 4104. [Google Scholar] [CrossRef]
- Bispo dos Santos, G.A.; Conti, L.A. Coastal land cover mapping using UAV imaging on the southeast coast of Brazil. J. Coast. Conserv. 2022, 26, 45. [Google Scholar] [CrossRef]
- Moura, M.M.; de Oliveira, L.E.S.; Sanquetta, C.R.; Bastos, A.; Mohan, M.; Corte, A.P.D. Towards Amazon forest restoration: Automatic detection of species from UAV imagery. Remote Sens. 2021, 13, 2627. [Google Scholar] [CrossRef]
- Ferreira, M.E.; Araújo, I.S.; Avino, F.S.; Costa, J.V.S.; Oliveira-da-Costa, M.; Albuquerque, R.W.; Balbuena, E.M. Zoning the fire-risk in protected areas in Brazil with drones: A study case for the Brasília National Park. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 9097–9100. [Google Scholar]
- Barbosa, B.D.S.; Araújo e Silva Ferraz, G.; Mendes dos Santos, L.; Santana, L.S.; Bedin Marin, D.; Rossi, G.; Conti, L. Application of rgb images obtained by uav in coffee farming. Remote Sens. 2021, 13, 2397. [Google Scholar] [CrossRef]
- Pichon, L.; Leroux, C.; Macombe, C.; Taylor, J.; Tisseyre, B. What relevant information can be identified by experts on unmanned aerial vehicles’ visible images for precision viticulture? Precis. Agric. 2019, 20, 278–294. [Google Scholar] [CrossRef]
- Mualla, Y.; Najjar, A.; Daoud, A.; Galland, S.; Nicolle, C.; Shakshuki, E. Agent-based simulation of unmanned aerial vehicles in civilian applications: A systematic literature review and research directions. Future Gener. Comput. Syst. 2019, 100, 344–364. [Google Scholar] [CrossRef]
- Leon, I.; Pérez, J.J.; Senderos, M. Advanced techniques for fast and accurate heritage digitisation in multiple case studies. Sustainability 2020, 12, 6068. [Google Scholar] [CrossRef]
- Jaud, M.; Grasso, F.; Le Dantec, N.; Verney, R.; Delacourt, C.; Ammann, J.; Deloffre, J.; Grandjean, P. Potential of UAVs for monitoring mudflat morphodynamics (application to the seine estuary, France). ISPRS Int. J. Geo-Inf. 2016, 5, 50. [Google Scholar] [CrossRef]
- De Swaef, T.; Maes, W.H.; Aper, J.; Baert, J.; Cougnon, M.; Reheul, D.; Steppe, K.; Roldán-Ruiz, I.; Lootens, P. Applying RGB-and thermal-based vegetation indices from UAVs for high-throughput field phenotyping of drought tolerance in forage grasses. Remote Sens. 2021, 13, 147. [Google Scholar] [CrossRef]
- Crowley, M.A.; Cardille, J.A. Remote sensing’s recent and future contributions to landscape ecology. Curr. Landsc. Ecol. Rep. 2020, 5, 45–57. [Google Scholar] [CrossRef]
- Daranagama, S.; Witayangkurn, A. Automatic building detection with polygonizing and attribute extraction from high-resolution images. ISPRS Int. J. Geo-Inf. 2021, 10, 606. [Google Scholar] [CrossRef]
- Jeong, S.; Ko, J.; Kim, M.; Kim, J. Construction of an unmanned aerial vehicle remote sensing system for crop monitoring. J. Appl. Remote Sens. 2016, 10, 26027. [Google Scholar] [CrossRef]
- Shin, J.-I.; Seo, W.-W.; Kim, T.; Park, J.; Woo, C.-S. Using UAV multispectral images for classification of forest burn severity—A case study of the 2019 Gangneung forest fire. Forests 2019, 10, 1025. [Google Scholar] [CrossRef]
- Yoo, C.; Oh, T. Beach volume change using UAV photogrammetry Songjung beach, Korea. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 1201–1205. [Google Scholar] [CrossRef]
- Lee, S.; Park, S.-j.; Baek, G.; Kim, H.; Lee, C.-W. Detection of damaged pine tree by the pine wilt disease using UAV Image. Korean J. Remote Sens. 2019, 35, 359–373. [Google Scholar]
- Zhou, X.; Kono, Y.; Win, A.; Matsui, T.; Tanaka, T.S. Predicting within-field variability in grain yield and protein content of winter wheat using UAV-based multispectral imagery and machine learning approaches. Plant Prod. Sci. 2021, 24, 137–151. [Google Scholar] [CrossRef]
- Karthigesu, J.; Owari, T.; Tsuyuki, S.; Hiroshima, T. UAV Photogrammetry for Estimating Stand Parameters of an Old Japanese Larch Plantation Using Different Filtering Methods at Two Flight Altitudes. Sensors 2023, 23, 9907. [Google Scholar] [CrossRef]
- Hasegawa, H.; Sujaswara, A.A.; Kanemoto, T.; Tsubota, K. Possibilities of Using UAV for Estimating Earthwork Volumes during Process of Repairing a Small-Scale Forest Road, Case Study from Kyoto Prefecture, Japan. Forests 2023, 14, 677. [Google Scholar] [CrossRef]
- Onishi, M.; Watanabe, S.; Nakashima, T.; Ise, T. Practicality and robustness of tree species identification using UAV RGB image and deep learning in temperate forest in Japan. Remote Sens. 2022, 14, 1710. [Google Scholar] [CrossRef]
- Nakano, T.; Kamiya, I.; Tobita, M.; Iwahashi, J.; Nakajima, H. Landform monitoring in active volcano by UAV and SFM-MVS technique. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 71–75. [Google Scholar] [CrossRef]
- Handique, B.; Khan, A.Q.; Goswami, C.; Prashnani, M.; Gupta, C.; Raju, P. Crop discrimination using multispectral sensor onboard unmanned aerial vehicle. Proc. Natl. Acad. Sci. India Sect. A Phys. Sci. 2017, 87, 713–719. [Google Scholar] [CrossRef]
- Adhikari, A.; Kumar, M.; Agrawal, S.; S, R. An integrated object and machine learning approach for tree canopy extraction from UAV datasets. J. Indian Soc. Remote Sens. 2021, 49, 471–478. [Google Scholar] [CrossRef]
- Lahoti, S.; Lahoti, A.; Saito, O. Application of unmanned aerial vehicle (UAV) for urban green space mapping in urbanizing Indian cities. In Unmanned Aerial Vehicle: Applications in Agriculture and Environment; Springer: Berlin/Heidelberg, Germany, 2020; pp. 177–188. [Google Scholar]
- Shukla, A.; Jain, K. Automatic extraction of urban land information from unmanned aerial vehicle (UAV) data. Earth Sci. Inform. 2020, 13, 1225–1236. [Google Scholar] [CrossRef]
- Ramsankaran, R.; Navinkumar, P.; Dashora, A.; Kulkarni, A.V. UAV-based survey of glaciers in himalayas: Challenges and recommendations. J. Indian Soc. Remote Sens. 2021, 49, 1171–1187. [Google Scholar] [CrossRef]
- Shenbagaraj, N.; Senthil Kumar, K.; Rasheed, A.M.; Leostalin, J.; Kumar, M.N. Mapping and electronic publishing of shoreline changes using UAV remote sensing and GIS. J. Indian Soc. Remote Sens. 2021, 49, 1769–1777. [Google Scholar] [CrossRef]
- Natividade, J.; Prado, J.; Marques, L. Low-cost multi-spectral vegetation classification using an Unmanned Aerial Vehicle. In Proceedings of the 2017 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Coimbra, Portuga, 26–28 April 2017; pp. 336–342. [Google Scholar]
- Pereira, E.; Bencatel, R.; Correia, J.; Félix, L.; Gonçalves, G.; Morgado, J.; Sousa, J. Unmanned air vehicles for coastal and environmental research. J. Coast. Res. 2009, 1557–1561. [Google Scholar]
- Gonçalves, J.; Henriques, R.; Alves, P.; Sousa-Silva, R.; Monteiro, A.T.; Lomba, Â.; Marcos, B.; Honrado, J. Evaluating an unmanned aerial vehicle-based approach for assessing habitat extent and condition in fine-scale early successional mountain mosaics. Appl. Veg. Sci. 2016, 19, 132–146. [Google Scholar] [CrossRef]
- Tenedório, J.A.; Estanqueiro, R.; Matos Lima, A.; Marques, J. Remote sensing from unmanned aerial vehicles for 3D urban modelling: Case study of Loulé, Portugal. In Back to the Sense of the City: International Monograph Book, Proceedings of the 11th Congress Virtual City and Territory, Krakow, Poland, 6–8 July 2016; Centre de Política de Sòl i Valoracions: Barcelona, Spain, 2016; pp. 1118–1128. [Google Scholar]
- Vilar, P.; Morais, T.G.; Rodrigues, N.R.; Gama, I.; Monteiro, M.L.; Domingos, T.; Teixeira, R.F. Object-based classification approaches for multitemporal identification and monitoring of pastures in agroforestry regions using multispectral unmanned aerial vehicle products. Remote Sens. 2020, 12, 814. [Google Scholar] [CrossRef]
- Lazzeri, G.; Frodella, W.; Rossi, G.; Moretti, S. Multitemporal mapping of post-fire land cover using multiplatform PRISMA hyperspectral and Sentinel-UAV multispectral data: Insights from case studies in Portugal and Italy. Sensors 2021, 21, 3982. [Google Scholar] [CrossRef]
- Surový, P.; Almeida Ribeiro, N.; Panagiotidis, D. Estimation of positions and heights from UAV-sensed imagery in tree plantations in agrosilvopastoral systems. Int. J. Remote Sens. 2018, 39, 4786–4800. [Google Scholar] [CrossRef]
- Böhler, J.E.; Schaepman, M.E.; Kneubühler, M. Optimal timing assessment for crop separation using multispectral unmanned aerial vehicle (UAV) data and textural features. Remote Sens. 2019, 11, 1780. [Google Scholar] [CrossRef]
- Loots, M.; Grobbelaar, S.; Van der Lingen, E. A review of remote-sensing unmanned aerial vehicles in the mining industry. J. South. Afr. Inst. Min. Metall. 2022, 122, 387–396. [Google Scholar] [CrossRef]
- Zhuo, X.; Fraundorfer, F.; Kurz, F.; Reinartz, P. Optimization of OpenStreetMap building footprints based on semantic information of oblique UAV images. Remote Sens. 2018, 10, 624. [Google Scholar] [CrossRef]
- Koutantou, K.; Mazzotti, G.; Brunner, P. UAV-based lidar high-resolution snow depth mapping in the Swiss Alps: Comparing flat and steep forests. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 43, 477–484. [Google Scholar] [CrossRef]
- Näsi, R.; Viljanen, N.; Kaivosoja, J.; Alhonoja, K.; Hakala, T.; Markelin, L.; Honkavaara, E. Estimating biomass and nitrogen amount of barley and grass using UAV and aircraft based spectral and photogrammetric 3D features. Remote Sens. 2018, 10, 1082. [Google Scholar] [CrossRef]
- Isokangas, E.; Davids, C.; Kujala, K.; Rauhala, A.; Ronkanen, A.-K.; Rossi, P.M. Combining unmanned aerial vehicle-based remote sensing and stable water isotope analysis to monitor treatment peatlands of mining areas. Ecol. Eng. 2019, 133, 137–147. [Google Scholar] [CrossRef]
- Roiha, J.; Heinaro, E.; Holopainen, M. The hidden cairns—A case study of drone-based ALS as an archaeological site survey method. Remote Sens. 2021, 13, 2010. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Blomqvist, M.; Lyytikäinen-Saarenmaa, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Holopainen, M. Remote sensing of bark beetle damage in urban forests at individual tree level using a novel hyperspectral camera from UAV and aircraft. Urban For. Urban Green. 2018, 30, 72–83. [Google Scholar] [CrossRef]
- Safie, S.; Khairil, R. Regulatory, technical, and safety considerations for UAV-based inspection in chemical process plants: A systematic review of current practice and future directions. Transp. Res. Interdiscip. Perspect. 2025, 30, 101343. [Google Scholar] [CrossRef]
- Lambertini, A.; Mandanici, E.; Tini, M.A.; Vittuari, L. Technical challenges for multi-temporal and multi-sensor image processing surveyed by UAV for mapping and monitoring in precision agriculture. Remote Sens. 2022, 14, 4954. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Othman, N.Q.H.; Li, Y.; Alsharif, M.H.; Khan, M.A. Unmanned aerial vehicles (UAVs): Practical aspects, applications, open challenges, security issues, and future trends. Intell. Serv. Robot. 2023, 16, 109–137. [Google Scholar] [CrossRef]
- Fu, Q.; Li, J.; Zhao, W. Motion primitives and sample-based trajectory planning for fixed-wing unmanned aircraft. Trans. Inst. Meas. Control 2024, 47, 1873–1882. [Google Scholar] [CrossRef]
- Elamin, A.; Abdelaziz, N.; El-Rabbany, A. A GNSS/INS/LiDAR integration scheme for UAV-based navigation in GNSS-challenging environments. Sensors 2022, 22, 9908. [Google Scholar] [CrossRef]
- He, Y.; Li, J.; Liu, J. Research on GNSS INS & GNSS/INS integrated navigation method for autonomous vehicles: A survey. IEEE Access 2023, 11, 79033–79055. [Google Scholar] [CrossRef]
- Yang, S.; Meng, Z.; Chen, X.; Xie, R. Real-time obstacle avoidance with deep reinforcement learning three-dimensional autonomous obstacle avoidance for uav. In Proceedings of the 2019 International Conference on Robotics, Intelligent Control and Artificial Intelligence, Shanghai, China, 20–22 September 2019; pp. 324–329. [Google Scholar]
- Liang, Q.; Wang, Z.; Yin, Y.; Xiong, W.; Zhang, J.; Yang, Z. Autonomous aerial obstacle avoidance using LiDAR sensor fusion. PLoS ONE 2023, 18, e0287177. [Google Scholar] [CrossRef]
- Ma, Z.; Yao, W.; Niu, Y.; Lin, B.; Liu, T. UAV low-altitude obstacle detection based on the fusion of LiDAR and camera. Auton. Intell. Syst. 2021, 1, 12. [Google Scholar] [CrossRef]
- Moffatt, A.; Platt, E.; Mondragon, B.; Kwok, A.; Uryeu, D.; Bhandari, S. Obstacle detection and avoidance system for small UAVs using a LiDAR. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 633–640. [Google Scholar]
- Wang, Y.; Fang, H. Estimation of LAI with the LiDAR technology: A review. Remote Sens. 2020, 12, 3457. [Google Scholar] [CrossRef]
- Esposito, S.; Mura, M.; Fallavollita, P.; Balsi, M.; Chirici, G.; Oradini, A.; Marchetti, M. Performance evaluation of lightweight LiDAR for UAV applications. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 792–795. [Google Scholar]
- Messina, G.; Modica, G. Applications of UAV thermal imagery in precision agriculture: State of the art and future research outlook. Remote Sens. 2020, 12, 1491. [Google Scholar] [CrossRef]
- Ajadi, O.; McAlpin, D. Recent Advances and Contribution of Synthetic Aperture Radar (SAR) Applications for Agricultural Monitoring; MDPI—Multidisciplinary Digital Publishing Institute: Basel, Switzerland, 2023. [Google Scholar]
- Kim, S.; Jeon, S.-Y.; Kim, J.; Lee, U.-M.; Shin, S.; Choi, Y.; Ka, M.-H. Multichannel W-band SAR system on a multirotor UAV platform with real-time data transmission capabilities. IEEE Access 2020, 8, 144413–144431. [Google Scholar] [CrossRef]
- Haq, M.A.; Rahaman, G.; Baral, P.; Ghosh, A. Deep learning based supervised image classification using UAV images for forest areas classification. J. Indian Soc. Remote Sens. 2021, 49, 601–606. [Google Scholar] [CrossRef]
- Huang, Y.; Wen, X.; Gao, Y.; Zhang, Y.; Lin, G. Tree Species Classification in UAV Remote Sensing Images Based on Super-Resolution Reconstruction and Deep Learning. Remote Sens. 2023, 15, 2942. [Google Scholar] [CrossRef]
- Bouguettaya, A.; Zarzour, H.; Kechida, A.; Taberkit, A.M. Deep learning techniques to classify agricultural crops through UAV imagery: A review. Neural Comput. Appl. 2022, 34, 9511–9536. [Google Scholar] [CrossRef] [PubMed]
- Gülci, S.; Akay, A.E.; Aricak, B.; Sariyildiz, T. Recent Advances in UAV-Based Structure-from-Motion Photogrammetry for Aboveground Biomass and Carbon Storage Estimations in Forestry. Concepts Appl. Remote Sens. For. 2023, 395–409. [Google Scholar]
- Xu, K.; Gong, Y.; Fang, S.; Wang, K.; Lin, Z.; Wang, F. Radiometric calibration of UAV remote sensing image with spectral angle constraint. Remote Sens. 2019, 11, 1291. [Google Scholar] [CrossRef]
- Daniels, L.; Eeckhout, E.; Wieme, J.; Dejaegher, Y.; Audenaert, K.; Maes, W.H. Identifying the optimal radiometric calibration method for UAV-based multispectral imaging. Remote Sens. 2023, 15, 2909. [Google Scholar] [CrossRef]
- De Keukelaere, L.; Moelans, R.; Knaeps, E.; Sterckx, S.; Reusen, I.; De Munck, D.; Simis, S.G.; Constantinescu, A.M.; Scrieciu, A.; Katsouras, G. Airborne drones for water quality mapping in inland, transitional and coastal waters—MapEO water data processing and validation. Remote Sens. 2023, 15, 1345. [Google Scholar] [CrossRef]
- Oré, G.; Alcântara, M.S.; Góes, J.A.; Oliveira, L.P.; Yepes, J.; Teruel, B.; Castro, V.; Bins, L.S.; Castro, F.; Luebeck, D.; et al. Crop Growth Monitoring with Drone-Borne DInSAR. Remote Sens. 2020, 12, 615. [Google Scholar] [CrossRef]
- Daud, S.M.S.M.; Yusof, M.Y.P.M.; Heo, C.C.; Khoo, L.S.; Singh, M.K.C.; Mahmood, M.S.; Nawawi, H. Applications of drone in disaster management: A scoping review. Sci. Justice 2022, 62, 30–42. [Google Scholar] [CrossRef]
- Gonzalez-Aguilera, D.; Rodriguez-Gonzalvez, P. Drones—An Open Access Journal. Drones 2017, 1, 1. [Google Scholar] [CrossRef]
- Yan, L.; Liao, X.; Zhou, C.; Fan, B.; Gong, J.; Cui, P.; Zheng, Y.; Tan, X. The impact of UAV remote sensing technology on the industrial development of China: A review. J. Geo-Inf. Sci. 2019, 21, 476–495. [Google Scholar]
- Olou, H.B.; Ezin, E.C.; Dembele, J.M.; Cambier, C. Autonomous navigation of unmanned aerial vehicle: Investigating architectures and techniques for a flexible platform. Unmanned Syst. 2025, 13, 193–209. [Google Scholar] [CrossRef]
- Kong, Z.; Ge, Q.; Pan, C. Current status and future prospects of manned/unmanned teaming networking issues. Int. J. Syst. Sci. 2025, 56, 866–884. [Google Scholar] [CrossRef]
- Zhang, T.; Li, Q.; Zhang, C.-s.; Liang, H.-w.; Li, P.; Wang, T.-m.; Li, S.; Zhu, Y.-l.; Wu, C. Current trends in the development of intelligent unmanned autonomous systems. Front. Inf. Technol. Electron. Eng. 2017, 18, 68–85. [Google Scholar] [CrossRef]
- Chaturvedi, S.K.; Sekhar, R.; Banerjee, S.; Kamal, H. Comparative review study of military and civilian unmanned aerial vehicles (UAVs). INCAS Bull. 2019, 11, 183–198. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, L.; Tian, T.; Yin, J. A review of unmanned aerial vehicle low-altitude remote sensing (UAV-LARS) use in agricultural monitoring in China. Remote Sens. 2021, 13, 1221. [Google Scholar] [CrossRef]
- Cao, Z.; Kooistra, L.; Wang, W.; Guo, L.; Valente, J. Real-time object detection based on uav remote sensing: A systematic literature review. Drones 2023, 7, 620. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Ghadi, Y.Y. Editorial on the Advances, Innovations and Applications of UAV Technology for Remote Sensing. Remote Sens. 2023, 15, 5087. [Google Scholar] [CrossRef]
- Quamar, M.M.; Al-Ramadan, B.; Khan, K.; Shafiullah, M.; El Ferik, S. Advancements and applications of drone-integrated geographic information system technology—A review. Remote Sens. 2023, 15, 5039. [Google Scholar] [CrossRef]
- Liu, K.; Zheng, J. UAV trajectory optimization for time-constrained data collection in UAV-enabled environmental monitoring systems. IEEE Internet Things J. 2022, 9, 24300–24314. [Google Scholar] [CrossRef]
- Tang, L.; Shao, G. Drone remote sensing for forestry research and practices. J. For. Res. 2015, 26, 791–797. [Google Scholar] [CrossRef]
- Oliveira, R.; Khoramshahi, E.; Suomalainen, J.; Hakala, T.; Viljanen, N.; Honkavaara, E. Real-time and post-processed georeferencing for hyperpspectral drone remote sensing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 789–795. [Google Scholar] [CrossRef]
- Liang, T.; Zhang, T.; Cao, B.; Zhang, Q. Sensing, Communication, and Control Co-design for Energy-Efficient UAV-Aided Data Collection. IEEE Wirel. Commun. Lett. 2024, 13, 2852–2856. [Google Scholar] [CrossRef]
- Rendezvous, V.; Ostertag, M.H.; Ma, J.; Rosing, T. Remote sensing with UAV and mobile recharging. In Proceedings of the 2022 Conference & Exhibition on Design, Automation & Test in Europe, Antwerp, Belgium, 14–23 March 2022; pp. 538–543. [Google Scholar]
- Saif, E.; Emınoğlu, İ. Hybrid Power Systems in Multi-Rotor UAVs: A Scientific Research and Industrial Production Perspective. IEEE Access 2022, 11, 438–458. [Google Scholar] [CrossRef]
- Aguiar, P.; Brett, D.; Brandon, N. Solid oxide fuel cell/gas turbine hybrid system analysis for high-altitude long-endurance unmanned aerial vehicles. Int. J. Hydrog. Energy 2008, 33, 7214–7223. [Google Scholar] [CrossRef]
- Ahmed, G.; Sheltami, T.; Mahmoud, A.; Yasar, A. Energy-efficient uavs coverage path planning approach. Comput. Model. Eng. Sci. 2023, 136, 3239–3263. [Google Scholar] [CrossRef]
- Zhu, M.; Zhou, Z.; Huang, D.; Peng, R.; Zhang, Y.; Li, Y.; Zhang, W. Extraction method for single Zanthoxylum bungeanum in karst mountain area based on unmanned aerial vehicle visible-light images. J. Appl. Remote Sens. 2021, 15, 26501. [Google Scholar] [CrossRef]
- Shahi, T.B.; Xu, C.-Y.; Neupane, A.; Guo, W. Recent advances in crop disease detection using UAV and deep learning techniques. Remote Sens. 2023, 15, 2450. [Google Scholar] [CrossRef]
- Dudukcu, H.V.; Taskiran, M.; Kahraman, N. UAV sensor data applications with deep neural networks: A comprehensive survey. Eng. Appl. Artif. Intell. 2023, 123, 106476. [Google Scholar] [CrossRef]
- Sadraey, M.H. Design of Unmanned Aerial Systems; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Kohli, L.; Saurabh, M.; Bhatia, I.; Shekhawat, U.S.; Vijh, M.; Sindhwani, N. Design and development of modular and multifunctional UAV with amphibious landing module. In Data Driven Approach Towards Disruptive Technologies, Proceedings of the MIDAS 2020, Monterey, CA, USA, 16–19 November 2020; Springer Nature: Berlin/Heidelberg, Germany, 2021; pp. 405–421. [Google Scholar]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Huang, Y.; Yan, L.; Zhou, Z.; Huang, D.; Li, Q.; Zhang, F.; Cai, L. Complex Habitat Deconstruction and Low-Altitude Remote Sensing Recognition of Tobacco Cultivation on Karst Mountainous. Agriculture 2024, 14, 411. [Google Scholar] [CrossRef]
- Nishar, A.; Richards, S.; Breen, D.; Robertson, J.; Breen, B. Thermal infrared imaging of geothermal environments and by an unmanned aerial vehicle (UAV): A case study of the Wairakei–Tauhara geothermal field, Taupo, New Zealand. Renew. Energy 2016, 86, 1256–1264. [Google Scholar] [CrossRef]
- Heinemann, S.; Siegmann, B.; Thonfeld, F.; Muro, J.; Jedmowski, C.; Kemna, A.; Kraska, T.; Muller, O.; Schultz, J.; Udelhoven, T. Land surface temperature retrieval for agricultural areas using a novel UAV platform equipped with a thermal infrared and multispectral sensor. Remote Sens. 2020, 12, 1075. [Google Scholar] [CrossRef]
- Du, X.; Huang, D.; Dai, L.; Du, X. Recognition of Plastic Film in Terrain-Fragmented Areas Based on Drone Visible Light Images. Agriculture 2024, 14, 736. [Google Scholar] [CrossRef]
- Chiu, S.-Y.; Tseng, Y.-C.; Chen, J.-J. Low-resolution thermal sensor-guided image synthesis. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 3–7 January 2023; pp. 60–69. [Google Scholar]
- Wang, Y.; Su, Z.; Ni, J.; Zhang, N.; Shen, X. Blockchain-empowered space-air-ground integrated networks: Opportunities, challenges, and solutions. IEEE Commun. Surv. Tutor. 2021, 24, 160–209. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef]
- Sharma, A.; Vanjani, P.; Paliwal, N.; Basnayaka, C.M.W.; Jayakody, D.N.K.; Wang, H.-C.; Muthuchidambaranathan, P. Communication and networking technologies for UAVs: A survey. J. Netw. Comput. Appl. 2020, 168, 102739. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, Z.-x.; Tao, Y.; Huang, X.-z.; Gu, X.-f. Agricultural remote sensing big data: Management and applications. J. Integr. Agric. 2018, 17, 1915–1931. [Google Scholar] [CrossRef]
- Razzaq, A.; Mohsan, S.A.H.; Ghayyur, S.A.K.; Alsharif, M.H.; Alkahtani, H.K.; Karim, F.K.; Mostafa, S.M. Blockchain-enabled decentralized secure big data of remote sensing. Electronics 2022, 11, 3164. [Google Scholar] [CrossRef]
- Wu, Z.; Sun, J.; Zhang, Y.; Wei, Z.; Chanussot, J. Recent developments in parallel and distributed computing for remotely sensed big data processing. Proc. IEEE 2021, 109, 1282–1305. [Google Scholar] [CrossRef]
- McKee, M.; Nassar, A.; Torres-Rua, A.; Aboutalebi, M.; Kustas, W. Implications of sensor inconsistencies and remote sensing error in the use of small unmanned aerial systems for generation of information products for agricultural management. In Proceedings of the SPIE Commercial+Scientific sensing and Imaging, Orlando, FL, USA, 15–19 April 2018. [Google Scholar]
- Buters, T.M.; Bateman, P.W.; Robinson, T.; Belton, D.; Dixon, K.W.; Cross, A.T. Methodological ambiguity and inconsistency constrain unmanned aerial vehicles as a silver bullet for monitoring ecological restoration. Remote Sens. 2019, 11, 1180. [Google Scholar] [CrossRef]
- Jiang, J.; Johansen, K.; Tu, Y.-H.; McCabe, M.F. Multi-sensor and multi-platform consistency and interoperability between UAV, Planet CubeSat, Sentinel-2, and Landsat reflectance data. GIScience Remote Sens. 2022, 59, 936–958. [Google Scholar] [CrossRef]
- Kedzierski, M.; Wierzbicki, D.; Sekrecka, A.; Fryskowska, A.; Walczykowski, P.; Siewert, J. Influence of lower atmosphere on the radiometric quality of unmanned aerial vehicle imagery. Remote Sens. 2019, 11, 1214. [Google Scholar] [CrossRef]
- Arroyo-Mora, J.P.; Kalacska, M.; Løke, T.; Schläpfer, D.; Coops, N.C.; Lucanus, O.; Leblanc, G. Assessing the impact of illumination on UAV pushbroom hyperspectral imagery collected under various cloud cover conditions. Remote Sens. Environ. 2021, 258, 112396. [Google Scholar] [CrossRef]
- Yang, C.; Huang, Q.; Li, Z.; Liu, K.; Hu, F. Big Data and cloud computing: Innovation opportunities and challenges. Int. J. Digit. Earth 2017, 10, 13–53. [Google Scholar] [CrossRef]
- Wu, H.; Li, Z.-L. Scale issues in remote sensing: A review on analysis, processing and modeling. Sensors 2009, 9, 1768–1793. [Google Scholar] [CrossRef]
- Mittal, P.; Singh, R.; Sharma, A. Deep learning-based object detection in low-altitude UAV datasets: A survey. Image Vis. Comput. 2020, 104, 104046. [Google Scholar] [CrossRef]
- Behera, T.K.; Bakshi, S.; Nappi, M.; Sa, P.K. Superpixel-based multiscale CNN approach toward multiclass object segmentation from UAV-captured aerial images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 1771–1784. [Google Scholar] [CrossRef]
- Li, Q.; Yan, L.; Huang, D.; Zhou, Z.; Zhang, Y.; Xiao, D. Construction of a small sample dataset and identification of Pitaya trees (Selenicereus) based on UAV image on close-range acquisition. J. Appl. Remote Sens. 2022, 16, 024502. [Google Scholar] [CrossRef]
- Belgiu, M.; Stein, A. Spatiotemporal image fusion in remote sensing. Remote Sens. 2019, 11, 818. [Google Scholar] [CrossRef]
- Li, J.; Li, Y.; He, L.; Chen, J.; Plaza, A. Spatio-temporal fusion for remote sensing data: An overview and new benchmark. Sci. China Inf. Sci. 2020, 63, 140301. [Google Scholar] [CrossRef]
- Zhu, X.; Cai, F.; Tian, J.; Williams, T.K.-A. Spatiotemporal fusion of multisource remote sensing data: Literature survey, taxonomy, principles, applications, and future directions. Remote Sens. 2018, 10, 527. [Google Scholar] [CrossRef]
- Balestra, M.; Marselis, S.; Sankey, T.T.; Cabo, C.; Liang, X.; Mokroš, M.; Peng, X.; Singh, A.; Stereńczak, K.; Vega, C. LiDAR Data Fusion to Improve Forest Attribute Estimates: A Review. Curr. For. Rep. 2024, 10, 281–297. [Google Scholar] [CrossRef]
- Khan, A.A.; Laghari, A.A.; Gadekallu, T.R.; Shaikh, Z.A.; Javed, A.R.; Rashid, M.; Estrela, V.V.; Mikhaylov, A. A drone-based data management and optimization using metaheuristic algorithms and blockchain smart contracts in a secure fog environment. Comput. Electr. Eng. 2022, 102, 108234. [Google Scholar] [CrossRef]
- Lei, B.; Li, N.; Guo, Y.; Wang, Z.; Wei, J.; Chen, R. Rapid data collection and processing in dense urban edge computing networks with drone assistance. Phys. Commun. 2024, 66, 102462. [Google Scholar] [CrossRef]
- Ghamisi, P.; Rasti, B.; Yokoya, N.; Wang, Q.; Hofle, B.; Bruzzone, L.; Bovolo, F.; Chi, M.; Anders, K.; Gloaguen, R. Multisource and multitemporal data fusion in remote sensing: A comprehensive review of the state of the art. IEEE Geosci. Remote Sens. Mag. 2019, 7, 6–39. [Google Scholar] [CrossRef]
- Li, J.; Hong, D.; Gao, L.; Yao, J.; Zheng, K.; Zhang, B.; Chanussot, J. Deep learning in multimodal remote sensing data fusion: A comprehensive review. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102926. [Google Scholar] [CrossRef]
- Steier, J.; Goebel, M.; Iwaszczuk, D. Is Your Training Data Really Ground Truth? A Quality Assessment of Manual Annotation for Individual Tree Crown Delineation. Remote Sens. 2024, 16, 2786. [Google Scholar] [CrossRef]
- Shah, S.F.A.; Mazhar, T.; Al Shloul, T.; Shahzad, T.; Hu, Y.-C.; Mallek, F.; Hamam, H. Applications, challenges, and solutions of unmanned aerial vehicles in smart city using blockchain. PeerJ Comput. Sci. 2024, 10, e1776. [Google Scholar] [CrossRef]
- Singh, R.K.; Singh, S.; Kumar, M.; Singh, Y.; Kumar, P. Drone Technology in Perspective of Data Capturing. In Technological Approaches for Climate Smart Agriculture; Springer International Publishing: Berlin/Heidelberg, Germany, 2024; pp. 363–374. [Google Scholar]
- Maniadaki, M.; Papathanasopoulos, A.; Mitrou, L.; Maria, E.-A. Reconciling remote sensing technologies with personal data and privacy protection in the European Union: Recent developments in Greek legislation and application perspectives in environmental law. Laws 2021, 10, 33. [Google Scholar] [CrossRef]
- Noor, N.M.; Mastor, I.Z.; Abdullah, A. UAV/drone zoning in urban planning: Review on legals and privacy. In Proceedings of the Second International Conference on the Future of ASEAN (ICoFA) 2017–Volume 2: Science and Technology; Springer: Singapore, 2018; pp. 855–862. [Google Scholar]
- Tran, T.-H.; Nguyen, D.-D. Management and regulation of drone operation in urban environment: A case study. Soc. Sci. 2022, 11, 474. [Google Scholar] [CrossRef]
- Nguyen, H.P.D.; Nguyen, D.D. Drone application in smart cities: The general overview of security vulnerabilities and countermeasures for data communication. In Development and Future of Internet of Drones (IoD): Insights, Trends and Road Ahead; Springer Nature: Berlin/Heidelberg, Germany, 2021; pp. 185–210. [Google Scholar]
- Custers, B. Drones here, there and everywhere introduction and overview. In The Future of Drone Use: Opportunities and Threats from Ethical and Legal Perspectives; Springer: Berlin/Heidelberg, Germany, 2016; pp. 3–20. [Google Scholar]
- Almohsen, A.S. Challenges Facing the Use of Remote Sensing Technologies in the Construction Industry: A Review. Buildings 2024, 14, 2861. [Google Scholar] [CrossRef]
- McTegg, S.J.; Tarsha Kurdi, F.; Simmons, S.; Gharineiat, Z. Comparative approach of unmanned aerial vehicle restrictions in controlled airspaces. Remote Sens. 2022, 14, 822. [Google Scholar] [CrossRef]
- Telli, K.; Kraa, O.; Himeur, Y.; Ouamane, A.; Boumehraz, M.; Atalla, S.; Mansoor, W. A comprehensive review of recent research trends on unmanned aerial vehicles (uavs). Systems 2023, 11, 400. [Google Scholar] [CrossRef]
- Berra, E.; Peppa, M. Advances and challenges of UAV SFM MVS photogrammetry and remote sensing: Short review. In Proceedings of the 2020 IEEE Latin American Grss & Isprs Remote Sensing Conference (lagirs), Santiago, Chile, 2–26 March 2020; pp. 533–538. [Google Scholar]
- Doornbos, J.; Bennin, K.E.; Babur, Ö.; Valente, J. Drone Technologies: A Tertiary Systematic Literature Review on a Decade of Improvements. IEEE Access 2024, 12, 23220–23239. [Google Scholar] [CrossRef]
- Alvarez-Vanhard, E.; Corpetti, T.; Houet, T. UAV & satellite synergies for optical remote sensing applications: A literature review. Sci. Remote Sens. 2021, 3, 100019. [Google Scholar]
- Russell, B.J.; Soffer, R.J.; Ientilucci, E.J.; Kuester, M.A.; Conran, D.N.; Arroyo-Mora, J.P.; Ochoa, T.; Durell, C.; Holt, J. The ground to space calibration experiment (G-SCALE): Simultaneous validation of UAV, airborne, and satellite imagers for Earth observation using specular targets. Remote Sens. 2023, 15, 294. [Google Scholar] [CrossRef]
- Katkuri, A.V.R.; Madan, H.; Khatri, N.; Abdul-Qawy, A.S.H.; Patnaik, K.S. Autonomous UAV navigation using deep learning-based computer vision frameworks: A systematic literature review. Array 2024, 23, 100361. [Google Scholar] [CrossRef]
- Kahraman, S.; Bacher, R. A comprehensive review of hyperspectral data fusion with lidar and sar data. Annu. Rev. Control 2021, 51, 236–253. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef]
- Eltner, A.; Kaiser, A.; Castillo, C.; Rock, G.; Neugirg, F.; Abellán, A. Image-based surface reconstruction in geomorphometry–merits, limits and developments. Earth Surf. Dyn. 2016, 4, 359–389. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.S. Evaluating tree detection and segmentation routines on very high resolution UAV LiDAR data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7619–7628. [Google Scholar] [CrossRef]
- Cao, L.; Liu, H.; Fu, X.; Zhang, Z.; Shen, X.; Ruan, H. Comparison of UAV LiDAR and digital aerial photogrammetry point clouds for estimating forest structural attributes in subtropical planted forests. Forests 2019, 10, 145. [Google Scholar] [CrossRef]
- Zhou, L.; Meng, R.; Tan, Y.; Lv, Z.; Zhao, Y.; Xu, B.; Zhao, F. Comparison of UAV-based LiDAR and digital aerial photogrammetry for measuring crown-level canopy height in the urban environment. Urban For. Urban Green. 2022, 69, 127489. [Google Scholar] [CrossRef]
- Zhang, J. Multi-source remote sensing data fusion: Status and trends. Int. J. Image Data Fusion 2010, 1, 5–24. [Google Scholar] [CrossRef]
- Opoku-Ware, K.; Kazemi, S.; Liang, X.; Li, L. Drone Remote Sensing and Evapotranspiration Modeling for Intercropping and Irrigation strategies Study. In Proceedings of the 2024 ASABE Annual International Meeting, Anaheim, CA, USA, 28–31 July 2024; p. 1. [Google Scholar]
- Dash, J.P.; Pearse, G.D.; Watt, M.S. UAV multispectral imagery can complement satellite data for monitoring forest health. Remote Sens. 2018, 10, 1216. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rank | Countries/ Regions | Number of Publications | Typical Research Areas |
|---|---|---|---|
| 1 | China | 1657 | Agricultural applications [44,45], Environmental Monitoring [46], Urban Management [47], Disaster Monitoring [48], Cultural Heritage Protection [58], Water management [59], Wildlife Monitoring [60], Forest monitoring [61], Land Management [62] |
| 2 | USA | 1094 | Environmental Monitoring [49], Disaster Response [50], Crop Monitoring [51], Biodiversity monitoring [52], Cultural Heritage Protection [53], Urban Plan [54], Infrastructure Monitoring [55], Wildfire Damage Assessment [56], Forest monitoring [57] |
| 3 | United Kingdom | 367 | Agricultural applications [63], Land cover change [64], Coastline Change and Ocean Monitoring [65], Archaeological exploration [66], Urban management monitoring [67] |
| 4 | Italy | 340 | Agricultural applications [68], Environmental Monitoring and Disaster Response [69], Heritage Conservation and Archaeology [70], Urban infrastructure monitoring [71], Forest monitoring [72], Volcano monitoring [73] |
| 5 | Germany | 308 | Agricultural applications [74], Environmental Monitoring [75], Urban planning and infrastructure monitoring [76], Geological Exploration [77], Forest monitoring [78] |
| 6 | Australia | 284 | Environmental Monitoring and Ecological Protection [79], Forestry Ecosystem Research [80], Water Resources and Coastline Research [81], Agricultural applications [82], Natural disaster monitoring [83], Land Management [84] |
| 7 | Canada | 209 | Disaster Response [85], Agricultural applications [86], Urban infrastructure monitoring [87], Archaeological research [88], Wildlife Monitoring [89], Forest monitoring [90] |
| 8 | Brazil | 177 | Land use and land cover change [91], Tropical forest monitoring and ecosystem research [92], Forest fire monitoring [93], Agricultural applications [94] |
| 9 | France | 163 | Agricultural applications [95], Urban infrastructure monitoring [96], Archaeological research [97], Coastal environmental monitoring [98] |
| 10 | Netherlands | 135 | Agricultural applications [99], Environmental Monitoring and Biodiversity Conservation [100], Urban Management [101] |
| 11 | South Korea | 128 | Agricultural applications [102], Disaster Monitoring [103], Beach and water quality monitoring [104], Forest monitoring [105] |
| 12 | Japan | 122 | Agricultural applications [106], Environmental Monitoring [107], Urban Plan [108], Forest monitoring [109], Volcano monitoring [110] |
| 13 | India | 107 | Agricultural applications [111], Forest monitoring [112], Urban Management [113], Land use monitoring [114], Glacier Survey [115], Coastline monitoring [116] |
| 14 | Portugal | 89 | Agricultural applications [117], Environmental Monitoring [118], Biodiversity Conservation [119], Urban Management [120], Land Use [121], Disaster Monitoring [122], Forest monitoring [123] |
| Switzerland | 89 | Agricultural applications [124], Environmental Monitoring [125], Urban Plan [126], Snow monitoring [127] | |
| 15 | Finland | 86 | Agricultural applications [128], Environmental Monitoring [129], Archeology [130], Forest monitoring [131] |
| Rank | Institution | Countries/Regions | Number of Publications |
|---|---|---|---|
| 1 | Chinese Academy of Sciences | China | 310 |
| 2 | Ministry of Agriculture Rural Affairs | China | 148 |
| 3 | University of Chinese Academy of Sciences | China | 140 |
| 4 | United States Department of Agriculture | USA | 120 |
| 5 | Wuhan University | China | 115 |
| 6 | University of California System | USA | 96 |
| 7 | Chinese Academy of Agricultural Sciences | China | 83 |
| 8 | China Agricultural University, | China | 76 |
| 9 | Beijing Academy of Agriculture Forestry Sciences, Consejo Superior De Investigaciones Cientificas Helmholtz Association, Helmholtz Association | China, USA, Germany | 73, 73, 73 |
| 10 | Consiglio Nazionale Delle Ricerche | Italy | 69 |
| 11 | Institute of Geographic Sciences and Natural Resources Research, State University System of Florida | China, USA | 67, 67 |
| 12 | Centre National De La Recherche Scientifique | France | 62 |
| 13 | Beijing Normal University, Northwest A&F University | China | 57, 57 |
| 14 | Texas A&M University System, University of Florida | USA, China | 54, 54 |
| 15 | Nanjing Agricultural University | China | 53 |
| Rank | Journal | Number of Publications |
|---|---|---|
| 1 | Remote Sensing | 1068 |
| 2 | Sensors | 205 |
| 3 | Drones | 154 |
| 4 | Computers and Electronics in Agriculture | 118 |
| 5 | International Journal of Remote Sensing | 94 |
| 6 | IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing | 94 |
| 6 | ISPRS Journal of Photogrammetry and Remote Sensing | 94 |
| 7 | Frontiers in Plant Science | 88 |
| 8 | International Journal of Applied Earth Observation and Geoinformation | 86 |
| 8 | Remote Sensing of Environment | 86 |
| 9 | Agronomy-Basel | 83 |
| 10 | IEEE Transactions on Geoscience and Remote Sensing | 74 |
| Rank | Author | Number of Publications | Institution | Country |
|---|---|---|---|---|
| 1 | Haikuan Feng | 43 | Beijing Academy of Agriculture and Forestry Sciences | China |
| 2 | Guijun Yang | 42 | Beijing Academy of Agriculture and Forestry Sciences | China |
| 3 | Honkavaara E | 36 | National Land Survey of Finland | Finland |
| 4 | Yubin Lan | 30 | Shandong University of Science and Technology | China |
| 5 | Lucieer Arko | 28 | University of Tasmania | Australia |
| 6 | Yan Zhu | 24 | Nanjing Agricultural University | China |
| 6 | Weixing Cao | 24 | Nanjing Agricultural University | China |
| 7 | Wenting Han | 21 | Northwest A&F University | China |
| 8 | Matese Alessandro | 20 | University of Turin | Italy |
| 8 | Di Gennaro Salvatore Filippo | 20 | Consiglio Nazionale delle Ricerche | Italy |
| 9 | Hakala Teemu A | 19 | Finnish Geospatial Research Institute | Finland |
| 10 | Yongchao Tian | 18 | Henan Polytechnic University | China |
| Rank | Subject Category | Number of Publications |
|---|---|---|
| 1 | Remote Sensing | 2107 |
| 2 | Environmental Sciences | 1947 |
| 3 | Imaging Science Photographic Technology | 1707 |
| 4 | Geosciences Multidisciplinary | 1559 |
| 5 | Engineering | 883 |
| Serial Number | Cluster | Keyword (Frequency) | Representative Research Direction |
|---|---|---|---|
| #0 | Vegetation Indices | Machine Learning, Unmanned Aerial Vehicle (UAV), Biomass, Index, Yield, Chlorophyll Content, Images, Prediction, Aboveground Biomass, Growth, Soil, Spectral Reflectance | Crop monitoring and health assessment. Core application: Agriculture and ecological monitoring are the dominant focuses. |
| #1 | Structure From Motion | UAV, Photogrammetry, Lidar, Structure From Motion, Accuracy, Models, Segmentation, Height, Topography, Point Clouds, Performance, River, Lidar Data, Image Processing, UAV Imagery, Density, Reconstruction, Tree Species Classification, Terrestrial, Digital Photogrammetry, Infrared Thermography, Terrain | Dominant 3D Modeling Technology: The frequency of SfM significantly exceeds that of LiDAR, indicating that cost-effectiveness remains the primary factor in technology selection, rather than absolute accuracy. |
| #2 | Object-Based Image Analysis | Random Forest, Management, Dynamics, Variability, Scale, Airborne Lidar, Water, Patterns, Biodiversity, Support Vector Machine, Landscape, Plants, Google Earth Engine | Image segmentation and object-based classification: Extended applications of traditional remote sensing image analysis methods. |
| #3 | Remote Sensing | Remote Sensing, Unmanned Aerial Vehicle, Classification, Imagery, Precision Agriculture, Model, Leaf Area Index, Forest, Management, Crop | Fundamental remote sensing models and monitoring methods: A concentrated manifestation of application-driven research, with precision agriculture being the strongest demand driver. |
| #4 | Deep Learning | Vegetation Index, Object Detection, Deep Learning, Feature Extraction, Chlorophyll Content, Computer Vision, Unmanned Aerial Vehicles, Fusion, Semantic Segmentation, Image Segmentation, Image Classification, Convolutional Neural Networks, W-Net, Spatial Resolution, Information, Land Cover, Time Series, Framework, Vegetation Mapping | Intelligent recognition and automated data processing: High-frequency terms are primarily established computer vision (CV) models, with a notable absence of new model terminology specifically adapted to remote sensing characteristics. |
| #5 | Hyperspectral Imaging | Algorithm, Retrieval, Calibration, Hyperspectral Imaging, Surface, Calibration, MODIS, Land Surface Temperature, Landsat, Atmospheric Condition, Hyperspectral Remote Sensing, Water Quality, Coastal, Fluorescence | Emerging sensor technologies: Focused on algorithms and calibration, but not yet widely applied at scale. |
| #6 | Eco Stress | Climate, Traits, Landsat8, Uncertainty, Vegetation Cover, Surface Temperature, Spatial Analysis | Ecological stress response analysis. |
| #7 | Aerial Photography | Cover, Image Analysis, Aerial Photography, Fluxes, Satellite Images | Aerial image interpretation. |
| #8 | Soil Surface | Forest, Features, Erosion, Image | Soil and surface structure monitoring. |
| #9 | Land Surface Phenology | Climate-Change, Plant Phenology, Land Surface Phenology, Chlorophyll-Aa, Inland Waters | Phenological changes and climate response. |
| Keywords | Year | Strength | Begin | End | 1993–2024 |
|---|---|---|---|---|---|
| Aircraft | 2000 | 5.48 | 2000 | 2018 | ▂▂▂▂▂▂▂▃▃▃▃▃▃▃▃▃▃▃▃▃▃▃▃▃▃▃▂▂▂▂▂ |
| Imagery | 2001 | 18.4 | 2009 | 2018 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▃▃▃▃▃▂▂▂▂▂ |
| Image processing | 2005 | 4.82 | 2005 | 2017 | ▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▃▃▃▃▃▃▃▃▂▂▂▂▂▂ |
| Aerial photography | 2006 | 5.86 | 2006 | 2016 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▃▃▃▃▃▃▂▂▂▂▂▂▂ |
| Unmanned aerial vehicle | 2006 | 7.57 | 2010 | 2015 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▃▂▂▂▂▂▂▂▂ |
| Crop | 2007 | 9.77 | 2007 | 2016 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▃▃▃▃▃▂▂▂▂▂▂▂ |
| Features | 2008 | 4.49 | 2015 | 2018 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▂▂▂▂▂ |
| Canopy temperature | 2009 | 3.51 | 2009 | 2017 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▃▃▃▃▂▂▂▂▂▂ |
| Water stress | 2009 | 7.46 | 2016 | 2018 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▂▂▂▂▂ |
| Scale | 2010 | 12.66 | 2010 | 2017 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▃▃▃▂▂▂▂▂▂ |
| Unmanned aircraft | 2010 | 4.54 | 2010 | 2017 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▃▃▃▂▂▂▂▂▂ |
| Accuracy | 2011 | 8.77 | 2011 | 2017 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▃▃▂▂▂▂▂▂ |
| Camera | 2011 | 8.73 | 2011 | 2018 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▃▃▃▂▂▂▂▂ |
| Classification | 2011 | 8.34 | 2011 | 2016 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▃▂▂▂▂▂▂▂ |
| Chlorophyll fluorescence | 2014 | 5.31 | 2014 | 2018 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▂▂▂▂▂ |
| Radiometric calibration | 2014 | 4.82 | 2014 | 2019 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▃▂▂▂▂ |
| Hyperspectral imagery | 2014 | 3.96 | 2014 | 2019 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▃▂▂▂▂ |
| Structure from motion | 2014 | 8.06 | 2015 | 2019 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▂▂▂▂ |
| Fluorescence | 2015 | 6.29 | 2015 | 2019 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▃▂▂▂▂ |
| Photosynthesis | 2015 | 5.86 | 2015 | 2018 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▂▂▂▂▂ |
| Topography | 2016 | 7.26 | 2016 | 2018 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▂▂▂▂▂ |
| Calibration | 2016 | 5.68 | 2016 | 2019 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▂▂▂▂ |
| Point clouds | 2016 | 5.47 | 2016 | 2017 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▂▂▂▂▂▂ |
| Digital surface model | 2016 | 5.13 | 2016 | 2019 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▂▂▂▂ |
| Digital elevation model | 2016 | 4.07 | 2016 | 2019 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▂▂▂▂ |
| High resolution | 2016 | 3.77 | 2016 | 2019 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▂▂▂▂ |
| Stomatal conductance | 2017 | 4.76 | 2017 | 2020 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▂▂▂ |
| Drought | 2017 | 3.74 | 2017 | 2020 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▂▂▂ |
| Coastal | 2017 | 3.58 | 2017 | 2018 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▂▂▂▂▂ |
| Winter-wheat | 2017 | 3.56 | 2017 | 2020 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃▃▂▂▂ |
| Maize | 2018 | 3.67 | 2018 | 2019 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▂▂▂▂ |
| Water quality | 2020 | 4.25 | 2020 | 2021 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▂▂ |
| Infrared thermography | 2020 | 3.82 | 2020 | 2021 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▂▂ |
| Individual tree detection | 2020 | 3.82 | 2020 | 2021 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▂▂ |
| Land cover classification | 2020 | 3.73 | 2020 | 2021 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▂▂ |
| Vegetation mapping | 2020 | 4.35 | 2021 | 2024 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃ |
| Precision | 2021 | 4.51 | 2021 | 2024 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃ |
| Landsat 8 | 2021 | 3.91 | 2021 | 2024 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃ |
| Spatial variability | 2021 | 3.91 | 2021 | 2024 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃ |
| Evaporation | 2021 | 3.61 | 2021 | 2024 | ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▃▃▃ |
| Field of Technology | Evolution and Breakthrough | Representative Technologies/Trends |
|---|---|---|
| Flight Platform | From single-function to diversification and high-performance; progress in materials, aerodynamic configuration, and navigation and control technologies. | Mult-rotor, fixed-wing, and VTOL UAVs; lightweight and high-strength materials such as carbon fiber; long-endurance, high-payload, strong environmental adaptability, and high-degree autonomy. |
| Sensor Technology | From single-optics to multi-type integration; miniaturization, light-weight, high-precision, intelligentization, and integration. | RGB, multispectral, hyperspectral, thermal infrared, LiDAR, SAR, and gas sensors; solid-state LiDAR; polarimetric remote sensing; integration of sensors with AI. |
| Flight Control and Navigation Systems | From manual remote control to high-degree autonomy; significant improvement in positioning and attitude control accuracy; intelligent path planning and obstacle avoidance. | GNSS (GPS, Beidou), IMU, RTK/PPK, SLAM, VIO; AI-assisted navigation (TAN); UAV swarm; advanced guidance, navigation, and control (GNC). |
| Data Processing and Analysis Methods | From traditional photogrammetry to intelligent processing; widespread application of deep learning; driven by the demand for real-time and automated processing. | SfM-MVS, radiometric/geometric correction, image fusion/classification; deep learning (CNN, RNN, GAN) for classification, object detection, segmentation, change detection; edge computing; cloud computing; big data processing technologies. |
| Application Fields | Main Application Contents | Key Technologies/Sensors |
|---|---|---|
| Military Reconnaissance and Security Surveillance | Intelligence collection, battlefield surveillance, target location, damage assessment, border patrol, counter-terrorism operations, inspection of critical infrastructure, and security for large-scale events. | High-definition cameras, thermal infrared sensors, Synthetic Aperture Radar (SAR), and signals intelligence equipment. |
| Precision Agriculture | Crop growth monitoring, pest and disease identification and control, yield estimation, variable fertilization and irrigation, farmland environment monitoring, and crop phenotyping analysis. | Multispectral/hyperspectral sensors, thermal infrared sensors, RGB cameras; deep learning. |
| Forestry and Pasture Management | Forest resource investigation, tree species identification, forest fire monitoring and assessment, pest and disease monitoring, wildlife habitat investigation, grassland productivity assessment, and biomass estimation. | LiDAR, multispectral/hyperspectral sensors, RGB cameras. |
| Environmental Monitoring and Assessment | Atmospheric pollution monitoring, water body eutrophication and black-odorous water body monitoring, soil erosion and desertification investigation, wetland ecosystem monitoring, biodiversity investigation, coastal zone erosion monitoring, and oil spill accident emergency monitoring. | Multispectral/hyperspectral sensors, thermal infrared sensors, gas sensors (DOAS), LiDAR. |
| Disaster Emergency Response and Management | Rapid disaster assessment, mapping of the affected area, personnel search and rescue, investigation of lifeline engineering damage, and secondary disaster monitoring and early warning. | High-definition cameras, thermal infrared sensors, LiDAR, SAR. |
| Surveying and Three-Dimensional Modeling | Topographic mapping, cadastral surveying, engineering reconnaissance, mine monitoring, archaeological excavation, urban 3D modeling, and DSM generation. | RGB cameras, LiDAR; SfM-MVS technology. |
| Power Line Inspection | Refined inspection of power transmission lines, towers, insulators, etc., to promptly identify potential hidden dangers. | Visible light cameras, infrared/ultraviolet sensors, LiDAR. |
| Urban Planning and Management | Land use change monitoring, illegal construction identification, traffic flow monitoring, urban greening assessment, smart city construction, and municipal facility inspection. | RGB cameras, LiDAR; Oblique photogrammetry. |
| Other Emerging Applications | Mining (reserve estimation, mining monitoring), construction (construction progress monitoring, quality inspection), archaeology (site discovery, surveying), logistics and transportation (cargo delivery), low-altitude tourism. | Diversified sensor combinations. |
| Technological Bottlenecks | Specific Manifestations | Impact and Challenges |
|---|---|---|
| Real-time and accurate data processing | Massive data volumes lead to time-consuming processing; complex algorithms (e.g., SfM, deep learning) involve high computational costs; edge computing capabilities are limited; and factors such as sensor calibration, illumination conditions, and algorithm robustness affect accuracy. | Meeting the requirements of emergency response and real-time monitoring remains challenging; data quality significantly impacts decision-making reliability; and problems such as variations in image orientation, high overlap ratios, and variable scales further complicate processing. |
| Sensor performance and cost | High-performance sensors (hyperspectral, LiDAR) are expensive; miniaturization, lightweight, and low power consumption still have room for improvement; calibration and maintenance require high professionalism; consumer-grade sensors have limited performance. | Limits its popularity among low-cost platforms and small- and medium-sized users; affects data quality and application effects; some sensors are difficult to meet specific application requirements (such as detection inside the canopy). |
| Endurance and stability of flight platforms | Battery technology bottlenecks lead to short flight time; poor flight stability under complex weather conditions; limited payload capacity; and impacted by electromagnetic interference. | Limit the scope and efficiency of operations; affect data acquisition quality and flight safety; and make it difficult to undertake large-area, long-term monitoring tasks. |
| Ability to operate in complex environments | Navigation positioning accuracy decreases in urban canyons, dense forests, and other environments; communication links are easily interfered or blocked; special terrain or lighting conditions affect imaging quality. | Limits its application in complex environments; affects the reliability and integrity of data acquisition. |
| Data management, storage, and sharing | Massive data places high demands on storage and management; the lack of unified data standards and formats makes sharing and interoperability difficult. | Increase data management costs; limit the comprehensive utilization and value mining of data. |
| Constraints | Specific Manifestations | Impact and Challenges |
|---|---|---|
| Airspace management and flight approval | UAV operations are constrained by restricted airspace, altitude, and coverage; the approval procedures are often complex and time-intensive; regulatory frameworks differ across regions; and a unified, efficient air traffic management system is still lacking. | Such constraints reduce the flexibility and efficiency of operations, elevate associated costs, impede the implementation of large-scale and high-frequency missions, and weaken the capacity for timely emergency response. |
| Data security and privacy protection | High-resolution data may involve sensitive content, posing risks of leakage and misuse; the legal and regulatory framework remains underdeveloped, with a lack of clear operational guidelines and well-defined responsibilities. | These issues trigger public concerns, pose risks to personal privacy and corporate confidentiality, elevate data compliance challenges, and obstruct effective data sharing and utilization. |
| Lack of industry standards and regulations | Unified standards are lacking across various aspects, including UAV platforms, sensors, data formats, processing procedures, and the quality of resulting products. | Inconsistencies in data quality and formats hinder comparability and interoperability, increase the challenges for users in selecting and utilizing data, and ultimately impede industry-wide collaboration and technological advancement. |
| Improvement and adaptability of the regulatory system | Regulatory frameworks have not kept pace with technological advancements; legal provisions remain ambiguous or overly complex; and coordination among oversight bodies is inadequate. | Such challenges lead to confusion and compliance uncertainties for operators, constrain technological innovation and market development, and impede effective responses to emerging application needs. |
| Responsibility identification and insurance mechanism | There is a lack of clarity in determining accident liability, and the associated legal frameworks and insurance mechanisms remain inadequate. | Accidents often lead to difficulties in liability attribution and compensation, which in turn elevates the overall operational risk. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, D.; Zhou, Z.; Zhang, Z.; Du, X.; Fan, R.; Li, Q.; Huang, Y. From Application-Driven Growth to Paradigm Shift: Scientific Evolution and Core Bottleneck Analysis in the Field of UAV Remote Sensing. Appl. Sci. 2025, 15, 8304. https://doi.org/10.3390/app15158304
Huang D, Zhou Z, Zhang Z, Du X, Fan R, Li Q, Huang Y. From Application-Driven Growth to Paradigm Shift: Scientific Evolution and Core Bottleneck Analysis in the Field of UAV Remote Sensing. Applied Sciences. 2025; 15(15):8304. https://doi.org/10.3390/app15158304
Chicago/Turabian StyleHuang, Denghong, Zhongfa Zhou, Zhenzhen Zhang, Xiandan Du, Ruiqi Fan, Qianxia Li, and Youyan Huang. 2025. "From Application-Driven Growth to Paradigm Shift: Scientific Evolution and Core Bottleneck Analysis in the Field of UAV Remote Sensing" Applied Sciences 15, no. 15: 8304. https://doi.org/10.3390/app15158304
APA StyleHuang, D., Zhou, Z., Zhang, Z., Du, X., Fan, R., Li, Q., & Huang, Y. (2025). From Application-Driven Growth to Paradigm Shift: Scientific Evolution and Core Bottleneck Analysis in the Field of UAV Remote Sensing. Applied Sciences, 15(15), 8304. https://doi.org/10.3390/app15158304