
Assessing the Impact of Risk-Warning eHMI Information Content on Pedestrian Mental Workload, Situation Awareness, and Gap Acceptance in Full and Partial eHMI Penetration Vehicle Platoons


 , and
, and
Abstract
1. Introduction
1.1. Information Content of Risk Warning eHMI
1.2. Risk Warning eHMI Penetration in Vehicle Platoon
2. Method
2.1. Participants
2.2. Experiment Setup
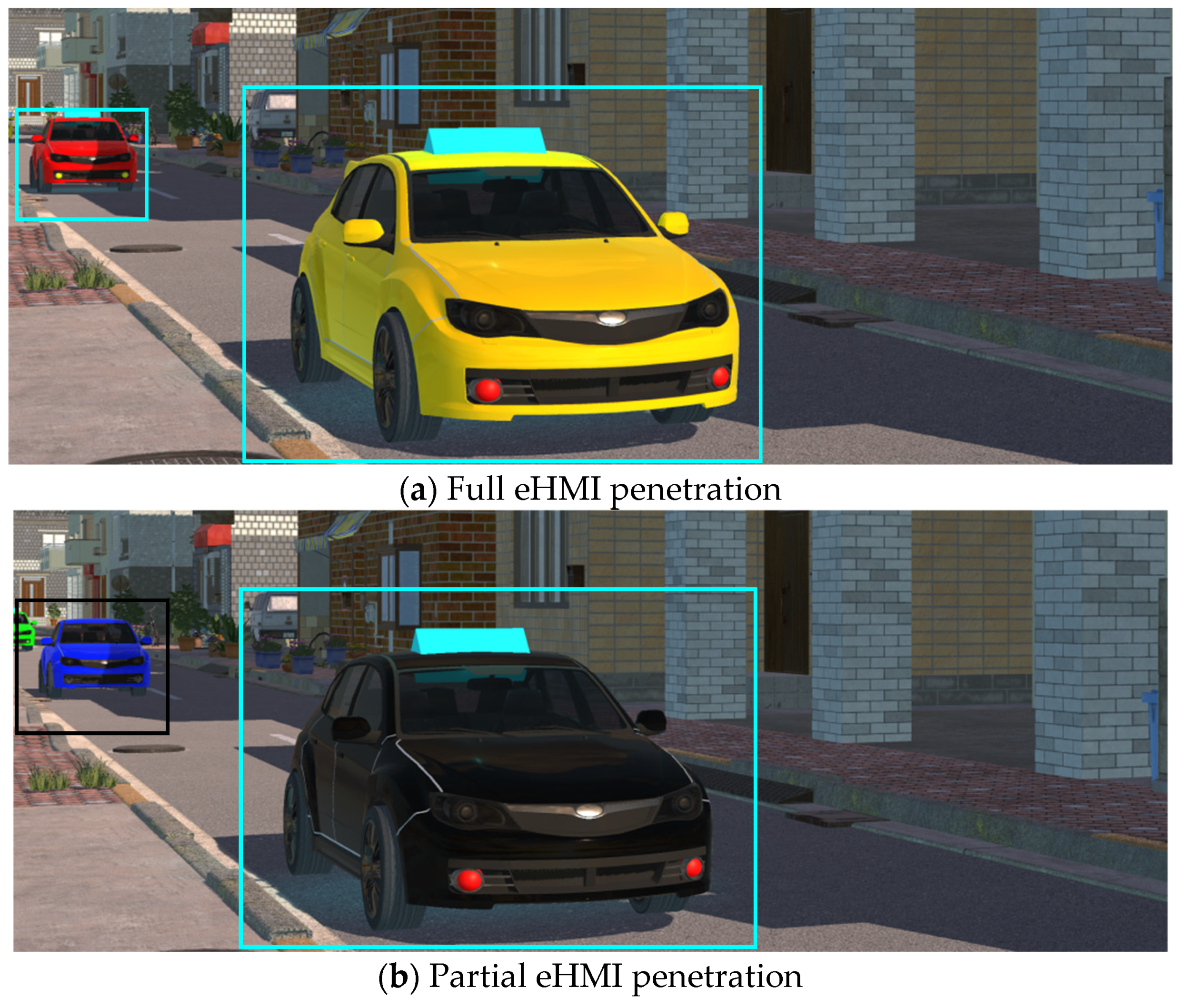
2.2.1. Apparatus and Materials
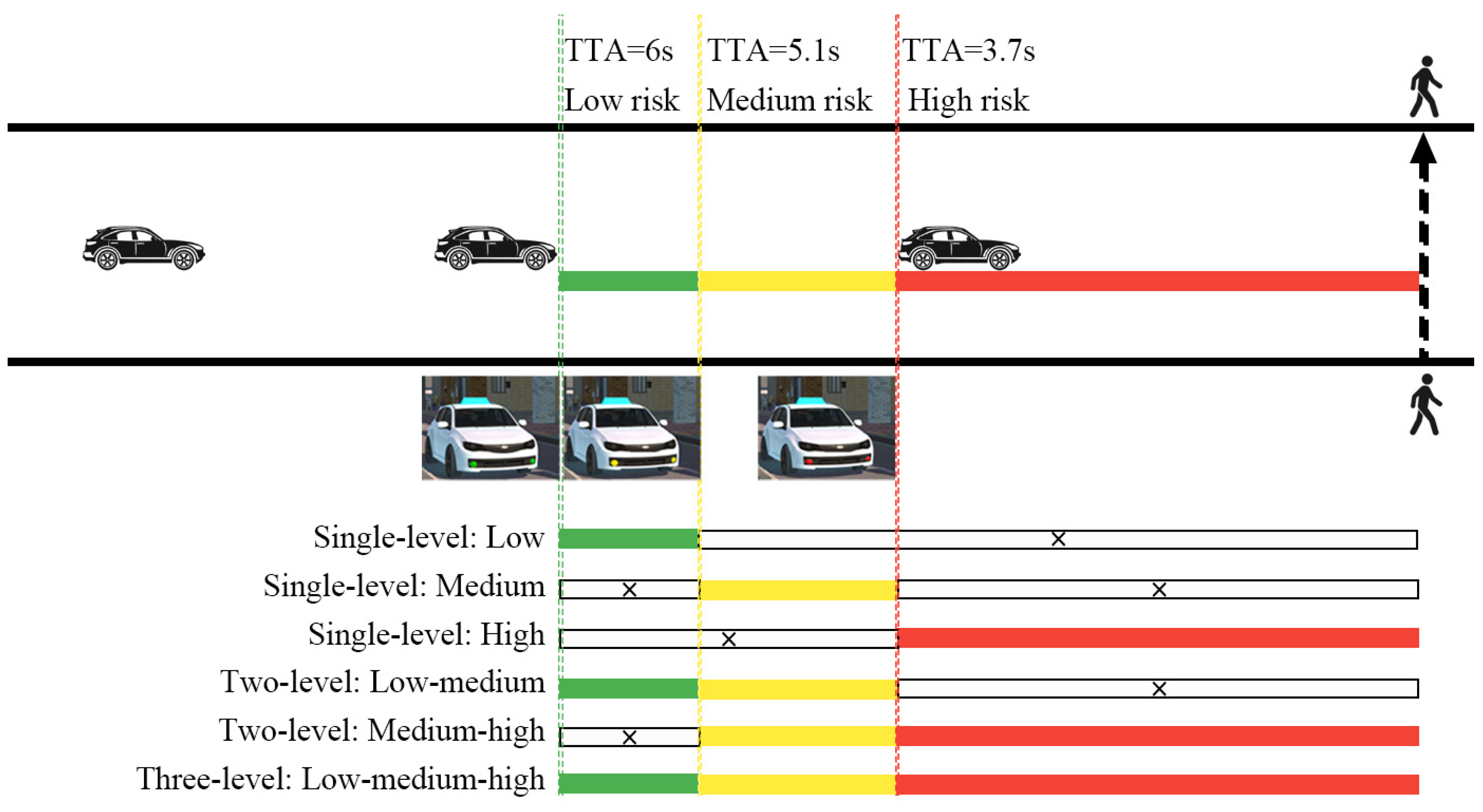
2.2.2. Experiment Design
- (1)
- Single-level: Low
- (2)
- Single-level: Medium
- (3)
- Single-level: High
- (4)
- Two-level: Low-medium
- (5)
- Two-level: Medium-high
- (6)
- Three-level: Low-medium-high
2.3. Dependent Variables
2.3.1. Gap Acceptance
2.3.2. P300
2.3.3. Oddball Counting Error Rate
2.3.4. Situation Awareness
2.3.5. Feedback
2.4. Procedure
2.5. Data Analysis
2.5.1. Gap Acceptance Analysis
2.5.2. P300 Analysis
EEG Data Processing
P300 Analysis
2.5.3. Oddball Counting Error Rate Analysis
2.5.4. Situation Awareness Analysis
2.5.5. Feedback Analysis
3. Results
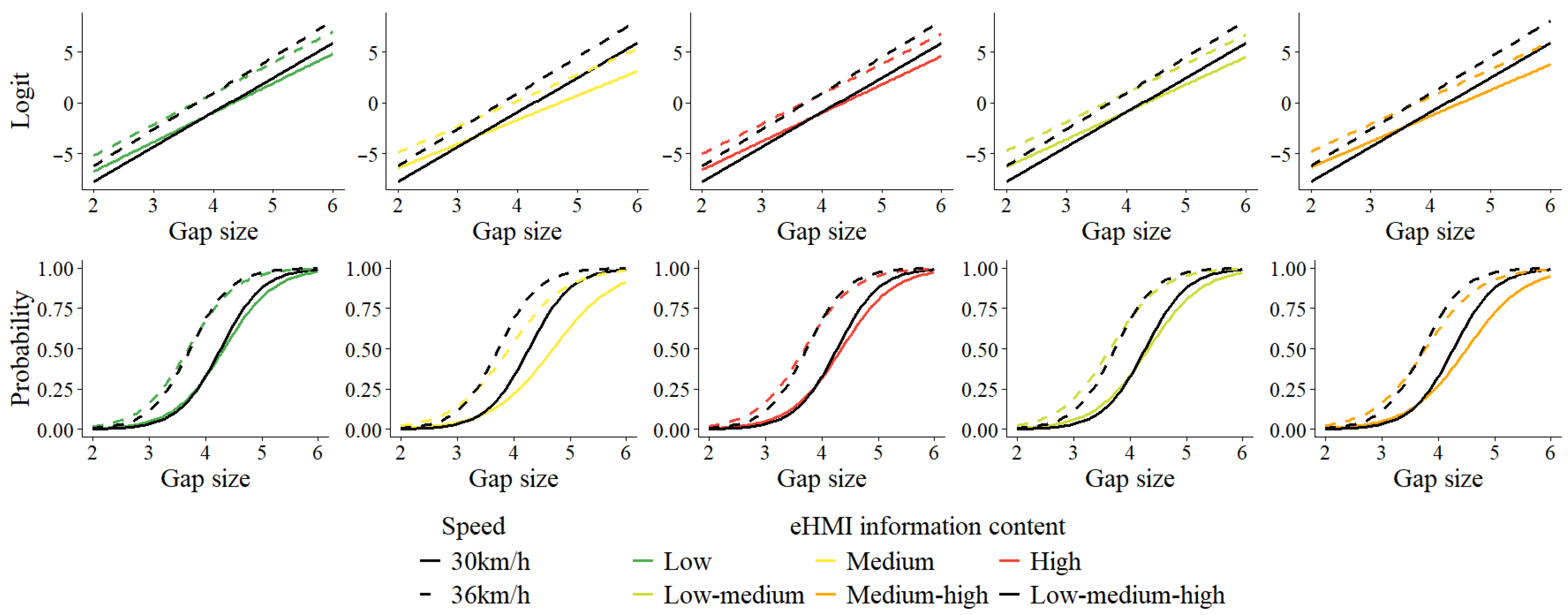
3.1. Results of Gap Acceptance
3.1.1. Gap Acceptance Under Full eHMI Penetration Condition
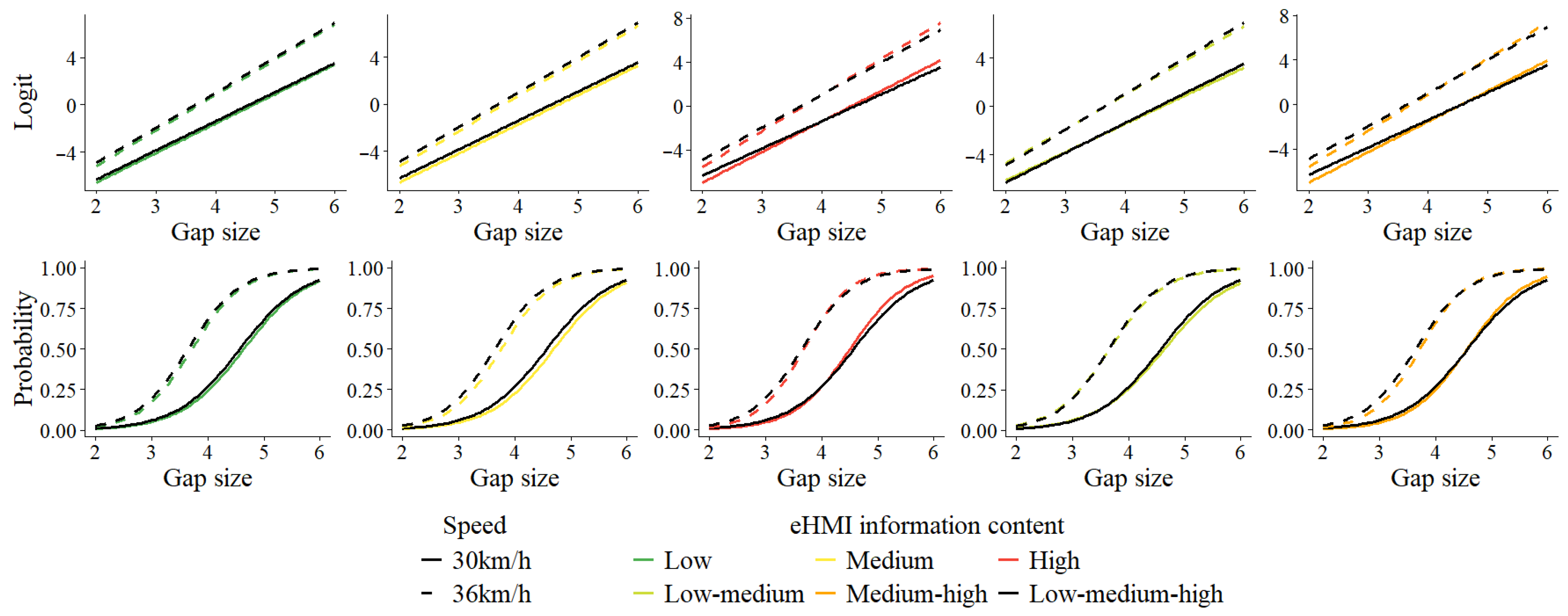
3.1.2. Gap Acceptance Under Partial eHMI Penetration Condition
AVs with eHMI
TVs Without eHMI
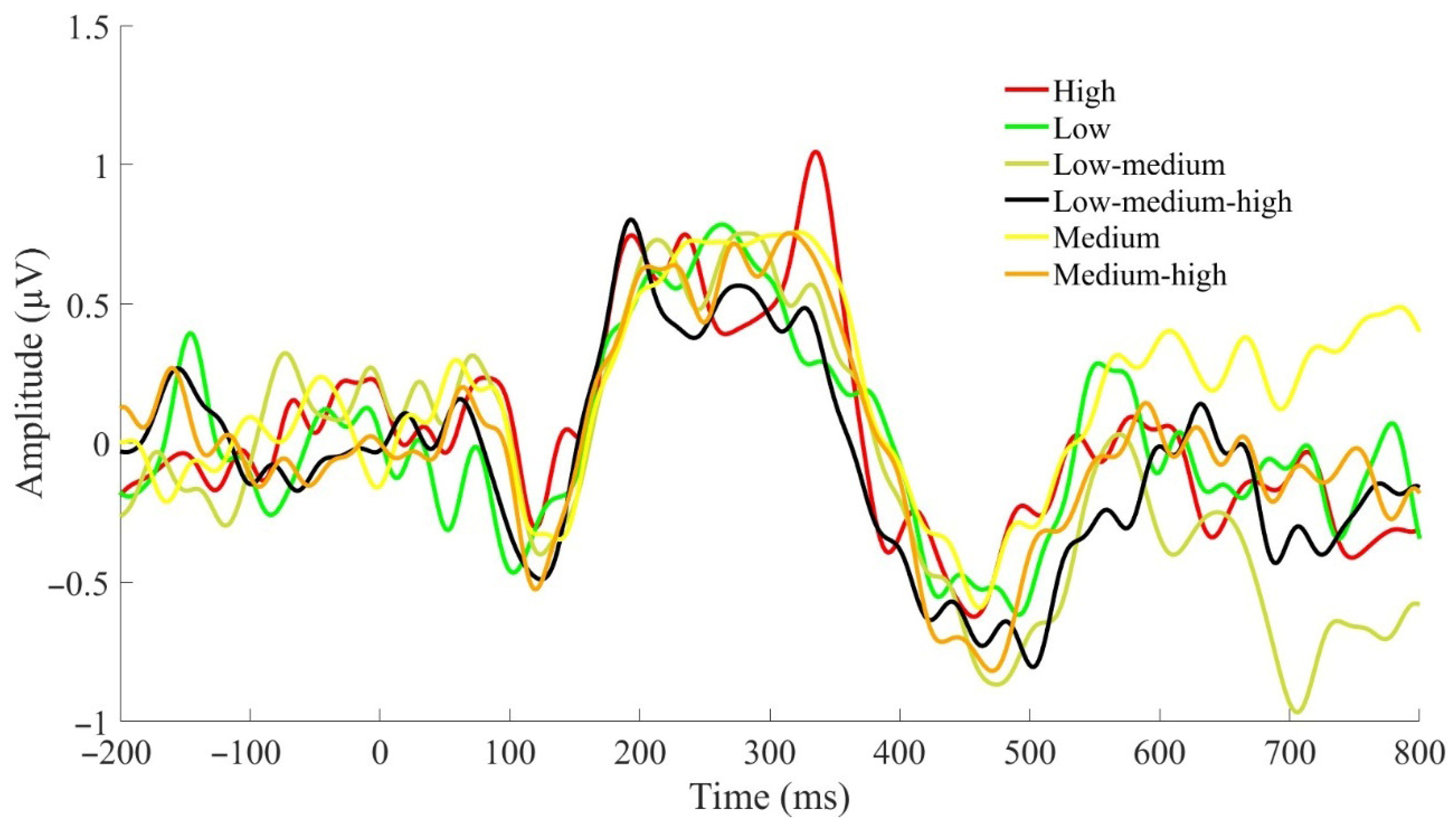
3.2. Results of P300
3.2.1. P300 Under Full eHMI Penetration Condition
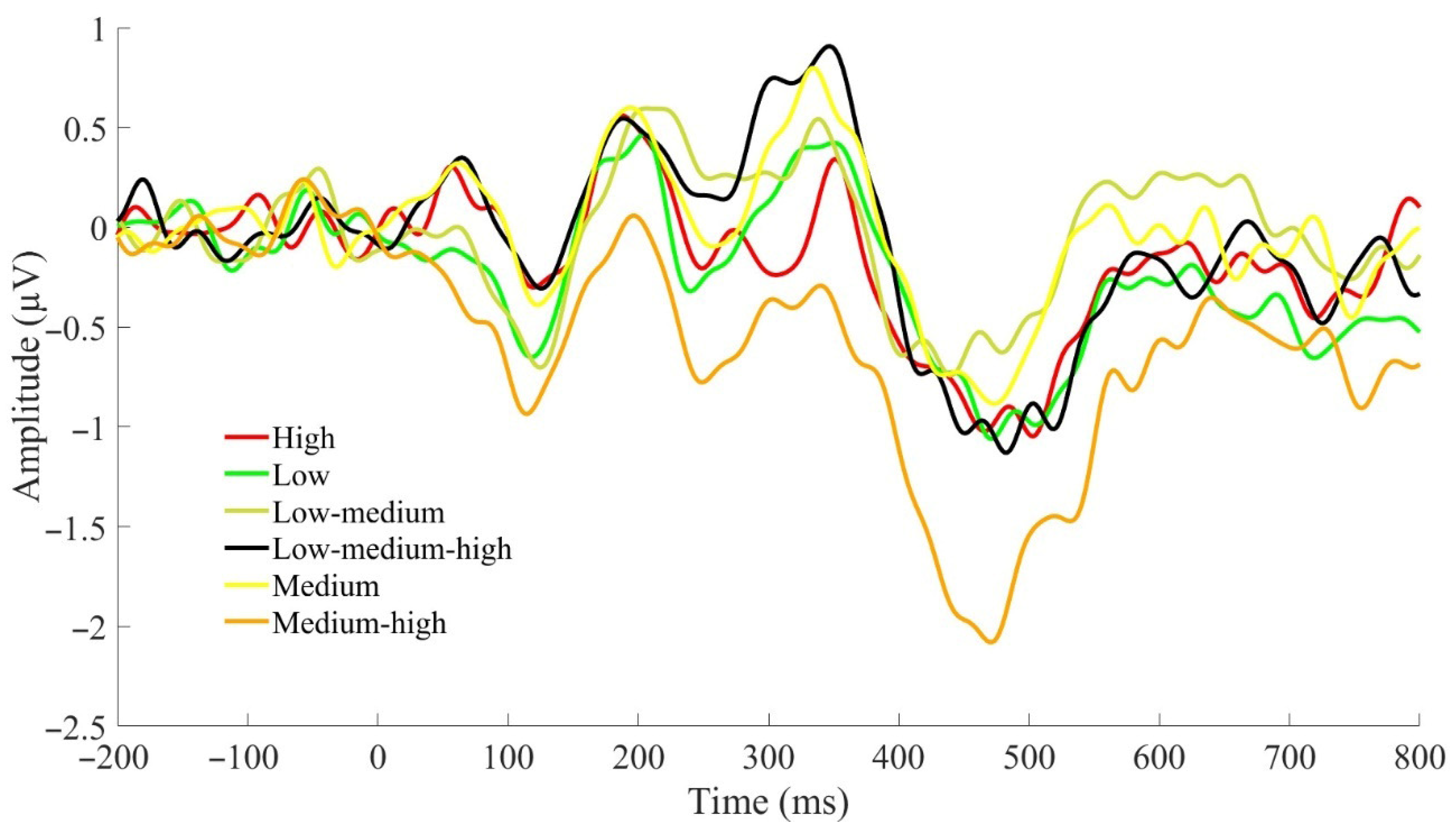
3.2.2. P300 Under Partial eHMI Penetration Condition
3.3. Results of Oddball Counting Error Rate
3.3.1. Oddball Counting Error Rate Under Full eHMI Penetration Condition
3.3.2. Oddball Counting Error Rate Under Partial eHMI Penetration Condition
3.4. Results of Situation Awareness
3.4.1. SA Under Full eHMI Penetration Condition
3.4.2. SA Under Partial eHMI Penetration Condition
3.5. Results of Feedback
3.5.1. eHMI Information Content Ranking Under Full eHMI Penetration Condition
3.5.2. eHMI Ranking Under Partial eHMI Penetration Condition
3.5.3. Pros and Cons for Each Information Content
4. Discussion
4.1. Effects of eHMI Information Contents, Gap Size and Speed on Gap Acceptance
4.2. Effects of eHMI Information Contents on MW and SA
4.3. Implications for eHMI Design and Application Scenarios
4.4. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- SAE International. Levels of Driving Automation. 2022. Available online: https://www.sae.org/blog/sae-j3016-update (accessed on 19 July 2024).
- Yang, S.; Du, M.; Chen, Q. Impact of connected and autonomous vehicles on traffic efficiency and safety of an on-ramp. Simul. Model. Pract. Theory 2021, 113, 102374. [Google Scholar] [CrossRef]
- de Winter, J.; Dodou, D. External human–machine interfaces: Gimmick or necessity? Transp. Res. Interdiscip. Perspect. 2022, 15, 100643. [Google Scholar] [CrossRef]
- Man, S.S.; Huang, C.; Ye, Q.; Chang, F.; Chan, A.H.S. Pedestrians’ interaction with eHMI-equipped autonomous vehicles: A bibliometric analysis and systematic review. Accid. Anal. Prev. 2025, 209, 107826. [Google Scholar] [CrossRef] [PubMed]
- Uttley, J.; Lee, Y.M.; Madigan, R.; Merat, N. Road user interactions in a shared space setting: Priority and communication in a UK car park. Transp. Res. Part F Traffic Psychol. Behav. 2020, 72, 32–46. [Google Scholar] [CrossRef]
- National Safety Council. Pedestrians. 2021. Available online: https://injuryfacts.nsc.org/motor-vehicle/road-users/pedestrians/ (accessed on 21 July 2024).
- Bazilinskyy, P.; Dodou, D.; de Winter, J. Survey on eHMI concepts: The effect of text, color, and perspective. Transp. Res. Part F Traffic Psychol. Behav. 2019, 67, 175–194. [Google Scholar] [CrossRef]
- Dey, D.; Habibovic, A.; Löcken, A.; Wintersberger, P.; Pfleging, B.; Riener, A.; Martens, M.; Terken, J. Taming the eHMI jungle: A classification taxonomy to guide, compare, and assess the design principles of automated vehicles’ external human-machine interfaces. Transp. Res. Interdiscip. Perspect. 2020, 7, 100174. [Google Scholar] [CrossRef]
- Chen, X.; Li, X.; Hou, Y.; Yang, W.; Dong, C.; Wang, H. Effect of eHMI-equipped automated vehicles on pedestrian crossing behavior and safety: A focus on blind spot scenarios. Accid. Anal. Prev. 2025, 212, 107915. [Google Scholar] [CrossRef] [PubMed]
- de Clercq, K.; Dietrich, A.; Nunez Velasco, J.P.; de Winter, J.; Happee, R. External human-machine interfaces on automated vehicles: Effects on pedestrian crossing decisions. Hum. Factors 2019, 61, 1353–1370. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Jiang, Q.; Chen, W.; Zhuang, X.; Ma, G. Pedestrians’ road-crossing behavior towards eHMI-equipped autonomous vehicles driving in segregated and mixed traffic conditions. Accid. Anal. Prev. 2023, 188, 107115. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Dikmen, M.; Hussein, T.G.; Wang, Y.; Burns, C. To cross or not to cross: Urgency-based external warning displays on autonomous vehicles to improve pedestrian crossing safety. In Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Toronto, ON, Canada, 23–25 September 2018; pp. 188–197. [Google Scholar]
- Rahimian, P.; O’Neal, E.E.; Zhou, S.; Plumert, J.M.; Kearney, J.K. Harnessing vehicle-to-pedestrian (V2P) communication technology: Sending traffic warnings to texting pedestrians. Hum. Factors 2018, 60, 833–843. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Jiang, Q.; Zhuang, X. Comparison of pedestrians’ gap acceptance behavior towards automated and human-driven vehicles. Engineering Psychology and Cognitive Ergonomics. In Proceedings of the Cognition and Design: 17th International Conference, EPCE 2020, Held as Part of the 22nd HCI International Conference, HCII 2020, Copenhagen, Denmark, 19–24 July 2020; pp. 253–261. [Google Scholar]
- Longo, L.; Wickens, C.D.; Hancock, G.; Hancock, P.A. Human mental workload: A survey and a novel inclusive definition. Front. Psychol. 2022, 13, 883321. [Google Scholar] [CrossRef] [PubMed]
- Vidulich, M.A.; Tsang, P.S. Mental workload and situation awareness. In Handbook of Human Factors and Ergonomics, 4th ed.; Salvendy, G., Ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2012; pp. 243–273. [Google Scholar]
- Endsley, M.R. Situation awareness. In Handbook of Human Factors and Ergonomics, 5th ed.; Salvendy, G., Karwowski, W., Eds.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2021; pp. 434–455. [Google Scholar]
- Endsley, M.R. Toward a theory of situation awareness in dynamic systems. Hum. Factors J. Hum. Factors Ergon. Soc. 1995, 37, 32–64. [Google Scholar] [CrossRef]
- Palmeiro, A.R.; van der Kint, S.; Vissers, L.; Farah, H.; de Winter, J.; Hagenzieker, M. Interaction between pedestrians and automated vehicles: A Wizard of Oz experiment. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 1005–1020. [Google Scholar] [CrossRef]
- Kaß, C.; Schoch, S.; Naujoks, F.; Hergeth, S.; Keinath, A.; Neukum, A. Standardized test procedure for external human–machine interfaces of automated vehicles. Information 2020, 11, 173. [Google Scholar] [CrossRef]
- Tabone, W.; de Winter, J.; Ackermann, C.; Bärgman, J.; Baumann, M.; Deb, S.; Emmenegger, C.; Habibovic, A.; Hagenzieker, M.; Hancock, P.A.; et al. Vulnerable road users and the coming wave of automated vehicles: Expert perspectives. Transp. Res. Interdiscip. Perspect. 2021, 9, 100293. [Google Scholar] [CrossRef]
- Rahimian, P.; O’Neal, E.E.; Yon, J.P.; Franzen, L.; Jiang, Y.; Plumert, J.M.; Kearney, J.K. Using a virtual environment to study the impact of sending traffic alerts to texting pedestrians. In Proceedings of the IEEE Virtual Reality (VR), Greenville, SC, USA, 19–23 March 2016; pp. 141–149. [Google Scholar]
- Cao, Y.; Zhuang, X.; Ma, G. Shorten pedestrians’ perceived waiting time: The effect of tempo and pitch in audible pedestrian signals at red phase. Accid. Anal. Prev. 2019, 123, 336–340. [Google Scholar] [CrossRef] [PubMed]
- Raoniar, R.; Maurya, A.K. Pedestrian red-light violation at signalised intersection crosswalks: Influence of social and non-social factors. Saf. Sci. 2022, 147, 105583. [Google Scholar] [CrossRef]
- Mukherjee, D.; Mitra, S. A comprehensive study on factors influencing pedestrian signal violation behaviour: Experience from Kolkata City, India. Saf. Sci. 2020, 124, 104610. [Google Scholar] [CrossRef]
- Colley, M.; Bajrovic, E.; Rukzio, E. Effects of pedestrian behavior, time pressure, and repeated exposure on crossing decisions in front of automated vehicles equipped with external communication. In Proceedings of the CHI Conference on Human Factors in Computing Systems, New Orleans, LA, USA, 29 April–5 May 2022; pp. 1–11. [Google Scholar]
- Dey, D.; Habibovic, A.; Berger, M.; Bansal, D.; Cuijpers, R.H.; Martens, M. Investigating the need for explicit communication of non-yielding intent through a slow-pulsing light band (SPLB) eHMI in AV-pedestrian interaction. In Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seoul, Republic of Korea, 17–20 September 2022; pp. 307–318. [Google Scholar]
- Zhao, X.; Li, X.; Rakotonirainy, A.; Bourgeois-Bougrine, S.; Gruyer, D.; Delhomme, P. The ‘invisible gorilla’ during pedestrian-AV interaction: Effects of secondary tasks on pedestrians’ reaction to eHMIs. Accid. Anal. Prev. 2023, 192, 107246. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Hirayama, T. Pre-instruction for pedestrians interacting autonomous vehicles with eHMI: Effects on their psychology and walking behavior. IEEE Trans. Intell. Transp. Syst. 2025, 1–12. [Google Scholar] [CrossRef]
- Lee, Y.M.; Sidorov, V.; Madigan, R.; Garcia de Pedro, J.; Markkula, G.; Merat, N. Hello, is it me you’re stopping for? The effect of external human machine interface familiarity on pedestrians’ crossing behaviour in an ambiguous situation. Hum. Factors 2025, 67, 264–279. [Google Scholar] [CrossRef] [PubMed]
- Lyu, W.; Zhang, W.; Wang, X.; Ding, Y.; Yang, X. Pedestrians’ responses to scalable automated vehicles with different external human-machine interfaces: Evidence from a video-based eye-tracking experiment. Transp. Res. Part F Traffic Psychol. Behav. 2024, 103, 112–127. [Google Scholar] [CrossRef]
- Colley, M.; Britten, J.; Rukzio, E. Scalability in external communication of automated vehicles: Evaluation and recommendations. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2023, 7, 1–26. [Google Scholar] [CrossRef]
- Colley, M.; Walch, M.; Gugenheimer, J.; Askari, A.; Rukzio, E. Towards inclusive external communication of autonomous vehicles for pedestrians with vision impairments. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–14. [Google Scholar]
- Yang, F.; Sun, X.; Ma, J.; Zhou, S.; Liu, B.; Li, P.; Lyu, W.; Wen, S. Neuroergonomic evaluation of risk-warning eHMI penetration rates in vehicle platoons: Effects on pedestrians’ mental workload, situation awareness, and gap acceptance. Sci. Rep. 2025. submitted. [Google Scholar]
- Eisma, Y.B.; van Gent, L.; de Winter, J. Should an external human-machine interface flash or just show text? A study with a gaze-contingent setup. Transp. Res. Part F Traffic Psychol. Behav. 2023, 97, 140–154. [Google Scholar] [CrossRef]
- Bazilinskyy, P.; Kooijman, L.; Dodou, D.; de Winter, J. How should external human-machine interfaces behave? Examining the effects of colour, position, message, activation distance, vehicle yielding, and visual distraction among 1,434 participants. Appl. Ergon. 2021, 95, 103450. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Lee, Y.M.; Madigan, R.; Solernou, A.; Merat, N. Interpreting pedestrians’ head movements when encountering automated vehicles at a virtual crossroad. Transp. Res. Part F Traffic Psychol. Behav. 2024, 103, 340–352. [Google Scholar] [CrossRef]
- Sun, R.; Zhuang, X.; Wu, C.; Zhao, G.; Zhang, K. The estimation of vehicle speed and stopping distance by pedestrians crossing streets in a naturalistic traffic environment. Transp. Res. Part F Traffic Psychol. Behav. 2015, 30, 97–106. [Google Scholar] [CrossRef]
- ISO/TR 23049:2018; Road Vehicles—Ergonomic Aspects of External Visual Communication from Automated Vehicles to Other Road Users. International Organization for Standardization: Geneva, Switzerland, 2018. Available online: https://www.iso.org/standard/74397.html (accessed on 30 January 2024).
- Salmon, P.; Stanton, N.; Walker, G.; Green, D. Situation awareness measurement: A review of applicability for C4i environments. Appl. Ergon. 2006, 37, 225–238. [Google Scholar] [CrossRef] [PubMed]
- Tobii. Metrics for Eye Tracking Analytics. Available online: https://developer.tobii.com/xr/learn/analytics/fundamentals/metrics/ (accessed on 30 January 2024).
- Guo, F.; Lyu, W.; Ren, Z.; Li, M.; Liu, Z. A video-based, eye-tracking study to investigate the effect of eHMI modalities and locations on pedestrian–automated vehicle interaction. Sustainability 2022, 14, 5633. [Google Scholar] [CrossRef]
- Marquart, G.; Cabrall, C.; de Winter, J. Review of eye-related measures of drivers’ mental workload. Procedia Manuf. 2015, 3, 2854–2861. [Google Scholar] [CrossRef]
- Bindschädel, J.; Krems, I.; Kiesel, A. Active vehicle pitch motion for communication in automated driving. Transp. Res. Part F Traffic Psychol. Behav. 2022, 87, 279–294. [Google Scholar] [CrossRef]
- Kolev, V.; Demiralp, T.; Yordanova, J.; Ademoglu, A.; Isoglu-Alkaç, Ü. Time–frequency analysis reveals multiple functional components during oddball P300. Neuroreport 1997, 8, 2061–2065. [Google Scholar] [CrossRef] [PubMed]
- Liebherr, M.; Corcoran, A.W.; Alday, P.M.; Coussens, S.; Bellan, V.; Howlett, C.A.; Immink, M.A.; Kohler, M.; Schlesewsky, M.; Bornkessel-Schlesewsky, I. EEG and behavioral correlates of attentional processing while walking and navigating naturalistic environments. Sci. Rep. 2021, 11, 22325. [Google Scholar] [CrossRef] [PubMed]
- Polich, J. 50+ years of P300: Where are we now? Psychophysiology 2020, 57, e13616. [Google Scholar] [CrossRef] [PubMed]
- Giraudet, L.; Imbert, J.P.; Berenger, M.; Tremblay, S.; Causse, M. The neuroergonomic evaluation of human machine interface design in air traffic control using behavioral and EEG/ERP measures. Behav. Brain Res. 2015, 294, 246–253. [Google Scholar] [CrossRef] [PubMed]
- Bolton, M.; Biltekoff, E.; Humphrey, L. The level of measurement of subjective situation awareness and its dimensions in the situation awareness rating technique (SART). IEEE Trans. Hum.-Mach. Syst. 2022, 52, 1147–1154. [Google Scholar] [CrossRef]
- Colley, M.; Li, S.; Rukzio, E. Increasing pedestrian safety using external communication of autonomous vehicles for signalling hazards. In Proceedings of the 23rd International Conference on Mobile Human-Computer Interaction, Toulouse, France, 27 September–1 October 2021; pp. 1–10. [Google Scholar]
- Eisele, D.; Petzoldt, T. Effects of traffic context on eHMI icon comprehension. Transp. Res. Part F Traffic Psychol. Behav. 2022, 85, 1–12. [Google Scholar] [CrossRef]
- Zhao, X.; Li, X.; Rakotonirainy, A.; Bourgeois-Bougrine, S.; Zhu, Z.; Delhomme, P. Crossing roads in a social context: How behaviors of others shape pedestrian interaction with automated vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2024, 102, 88–106. [Google Scholar] [CrossRef]
- Madigan, R.; Lee, Y.M.; Lyu, W.; Carlowitz, S.; de Pedro, J.G.; Merat, N. Pedestrian interactions with automated vehicles: Does the presence of a zebra crossing affect how eHMIs and movement patterns are interpreted? Transp. Res. Part F Traffic Psychol. Behav. 2023, 98, 170–185. [Google Scholar] [CrossRef]
- Kadali, B.R.; Vedagiri, P.; Rathi, N. Models for pedestrian gap acceptance behaviour analysis at unprotected mid-block crosswalks under mixed traffic conditions. Transp. Res. Part F Traffic Psychol. Behav. 2015, 32, 114–126. [Google Scholar] [CrossRef]
- Chuang, C.H.; Chiu, T.F.; Hsu, H.C.; Lin, S.S. Coupling mobile brain imaging and virtual reality omnidirectional treadmill to explore attenuated situational awareness during distracted walking. IEEE Trans. Cogn. Dev. Syst. 2024, 16, 1063–1076. [Google Scholar] [CrossRef]
- Forke, J.; Fröhlich, P.; Suette, S.; Gafert, M.; Puthenkalam, J.; Diamond, L.; Zeilinger, M.; Tscheligi, M. Understanding the headless rider: Display-based awareness and intent-communication in automated vehicle-pedestrian interaction in mixed traffic. Multimodal Technol. Interact. 2021, 5, 51. [Google Scholar] [CrossRef]
- Holländer, K.; Hoggenmüller, M.; Gruber, R.; Völkel, S.T.; Butz, A. Take it to the curb: Scalable communication between autonomous cars and vulnerable road users through curbstone displays. Front. Comput. Sci. 2022, 4, 844245. [Google Scholar] [CrossRef]
- Tran, T.T.M.; Parker, C.; Hoggenmüller, M.; Wang, Y.; Tomitsch, M. Exploring the impact of interconnected external interfaces in autonomous vehicles on pedestrian safety and experience. In Proceedings of the CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 11–16 May 2024; pp. 1–17. [Google Scholar]
- Jiang, Q.; Zhuang, X.; Ma, G. Evaluation of external HMI in autonomous vehicles based on pedestrian road crossing decision-making model. Adv. Psychol. Sci. 2022, 29, 1979–1992. [Google Scholar] [CrossRef]
- Dey, D.; Matviienko, A.; Berger, M.; Pfleging, B.; Martens, M.; Terken, J. Communicating the intention of an automated vehicle to pedestrians: The contributions of eHMI and vehicle behavior. IT-Inf. Technol. 2020, 63, 123–141. [Google Scholar] [CrossRef]
- Dey, D.; Terken, J. Pedestrian interaction with vehicles: Roles of explicit and implicit communication. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Oldenburg, Germany, 24–27 September 2017; pp. 109–113. [Google Scholar]
- Lee, Y.M.; Madigan, R.; Giles, O.; Garach-Morcillo, L.; Markkula, G.; Fox, C.; Camara, F.; Rothmueller, M.; Vendelbo-Larsen, S.A.; Rasmussen, P.H.; et al. Road users rarely use explicit communication when interacting in today’s traffic: Implications for automated vehicles. Cogn. Technol. Work 2020, 23, 367–380. [Google Scholar] [CrossRef]
- Dommes, A. Street-crossing workload in young and older pedestrians. Accid. Anal. Prev. 2019, 128, 175–184. [Google Scholar] [CrossRef] [PubMed]
- Chang, C.M. A gender study of communication interfaces between an autonomous car and a pedestrian. In Proceedings of the 12th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Virtual Event, 21–22 September 2020; pp. 42–45. [Google Scholar]
- Joisten, P.; Liu, Z.; Theobald, N.; Webler, A.; Abendroth, B. Communication of automated vehicles and pedestrian groups: An intercultural study on pedestrians’ street crossing decisions. In Proceedings of the Mensch und Computer 2021, Ingolstadt, Germany, 5–8 September 2021; pp. 49–53. [Google Scholar]
- Lanzer, M.; Babel, F.; Yan, F.; Zhang, B.; You, F.; Wang, J.; Baumann, M. Designing communication strategies of autonomous vehicles with pedestrians: An intercultural study. In Proceedings of the 12th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Virtual Event, 21–22 September 2020; pp. 122–131. [Google Scholar]
- Hsu, C.K.; Rodriguez, D.A. A comparison of heat effects on road injury frequency between active travelers and motorized transportation users in six tropical and subtropical cities in Taiwan. Soc. Sci. Med. 2024, 360, 117333. [Google Scholar] [CrossRef] [PubMed]
- Zhai, X.; Huang, H.; Sze, N.N.; Song, Z.; Hon, K.K. Diagnostic analysis of the effects of weather condition on pedestrian crash severity. Accid. Anal. Prev. 2019, 122, 318–324. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Predictors | Estimate | Std. Error | z Value | Pr (>|z|) |
|---|---|---|---|---|
| (Intercept) | −1.724 | 0.422 | −4.091 | <0.001 |
| ‘eHMI’ Low | 0.241 | 0.202 | 1.191 | 0.234 |
| ‘eHMI’ Medium | 0.385 | 0.193 | 1.991 | 0.046 |
| ‘eHMI’ High | 0.504 | 0.195 | 2.591 | 0.010 |
| ‘eHMI’ Low-medium | 0.913 | 0.198 | 4.601 | <0.001 |
| ‘eHMI’ Medium-high | 0.768 | 0.194 | 3.955 | <0.001 |
| Speed 36 km/h | 1.936 | 0.123 | 15.744 | <0.001 |
| Gap size | 4.793 | 0.307 | 15.625 | <0.001 |
| ‘eHMI’ Low: Gap size | −0.086 | 0.382 | −0.225 | 0.822 |
| ‘eHMI’ Medium: Gap size | −0.858 | 0.345 | −2.487 | 0.013 |
| ‘eHMI’ High: Gap size | −0.707 | 0.351 | −2.013 | 0.044 |
| ‘eHMI’ Low-medium: Gap size | −0.368 | 0.367 | −1.002 | 0.316 |
| ‘eHMI’ Medium-high: Gap size | −0.744 | 0.349 | −2.130 | 0.033 |
| Speed 36 km/h: Gap size | −0.035 | 0.207 | −0.167 | 0.867 |
| Predictors | Estimate | Std. Error | z Value | Pr (>|z|) |
|---|---|---|---|---|
| (Intercept) | −0.914 | 0.480 | −1.904 | 0.057 |
| ‘eHMI’ Low | −0.030 | 0.271 | −0.111 | 0.912 |
| ‘eHMI’ Medium | −0.737 | 0.267 | −2.756 | 0.006 |
| ‘eHMI’ High | −0.061 | 0.269 | −0.227 | 0.821 |
| ‘eHMI’ Low-medium | 0.038 | 0.267 | 0.141 | 0.888 |
| ‘eHMI’ Medium-high | −0.354 | 0.266 | −1.333 | 0.183 |
| Speed 36 km/h | 1.871 | 0.167 | 11.231 | <0.001 |
| Gap size | 4.392 | 0.404 | 10.861 | <0.001 |
| ‘eHMI’ Low: Gap size | −0.663 | 0.470 | −1.411 | 0.158 |
| ‘eHMI’ Medium: Gap size | −1.320 | 0.437 | −3.019 | 0.003 |
| ‘eHMI’ High: Gap size | −0.790 | 0.462 | −1.709 | 0.087 |
| ‘eHMI’ Low-medium: Gap size | −0.911 | 0.456 | −2.001 | 0.045 |
| ‘eHMI’ Medium-high: Gap size | −1.129 | 0.445 | −2.538 | 0.011 |
| Speed 36 km/h: Gap size | 0.202 | 0.242 | 0.835 | 0.404 |
| Predictors | Estimate | Std. Error | z Value | Pr (>|z|) |
|---|---|---|---|---|
| (Intercept) | −1.382 | 0.534 | −2.589 | 0.010 |
| ‘eHMI’ Low | −0.194 | 0.255 | −0.763 | 0.446 |
| ‘eHMI’ Medium | −0.320 | 0.256 | −1.250 | 0.211 |
| ‘eHMI’ High | −0.003 | 0.259 | −0.013 | 0.989 |
| ‘eHMI’ Low-medium | −0.076 | 0.251 | −0.305 | 0.760 |
| ‘eHMI’ Medium-high | −0.135 | 0.259 | −0.522 | 0.601 |
| Speed 36 km/h | 2.412 | 0.178 | 13.585 | <0.001 |
| Gap size | 3.176 | 0.282 | 11.242 | <0.001 |
| ‘eHMI’ Low: Gap size | 0.041 | 0.347 | 0.119 | 0.905 |
| ‘eHMI’ Medium: Gap size | 0.031 | 0.347 | 0.090 | 0.928 |
| ‘eHMI’ High: Gap size | 0.410 | 0.369 | 1.112 | 0.266 |
| ‘eHMI’ Low-medium: Gap size | −0.158 | 0.336 | −0.469 | 0.639 |
| ‘eHMI’ Medium-high: Gap size | 0.353 | 0.365 | 0.967 | 0.333 |
| Speed 36 km/h: Gap size | 0.647 | 0.233 | 2.772 | 0.006 |
| P300 | Low | Medium | High | Low-Medium | Medium-High | Low-Medium-High |
|---|---|---|---|---|---|---|
| Mean | 1.26 | 1.36 | 1.35 | 1.29 | 1.26 | 1.17 |
| SD | 1.17 | 0.90 | 1.00 | 0.82 | 1.46 | 1.22 |
| P300 | Low | Medium | High | Low–Medium | Medium–High | Low–Medium–High |
|---|---|---|---|---|---|---|
| Mean | 1.10 | 1.37 | 0.97 | 1.03 | 0.33 | 1.47 |
| SD | 1.51 | 1.49 | 1.61 | 0.94 | 1.10 | 1.97 |
| Oddball | Low | Medium | High | Low–Medium | Medium–High | Low–Medium–High |
|---|---|---|---|---|---|---|
| Mean | 3.00 | 4.58 | 3.00 | 2.75 | 3.75 | 4.83 |
| SD | 2.83 | 4.68 | 3.57 | 2.86 | 3.91 | 5.13 |
| Oddball | Low | Medium | High | Low–Medium | Medium–High | Low–Medium–High |
|---|---|---|---|---|---|---|
| Mean | 1.80 | 2.30 | 3.40 | 3.70 | 5.00 | 1.90 |
| SD | 2.82 | 2.16 | 4.48 | 3.33 | 4.52 | 1.79 |
| SA | Low | Medium | High | Low–Medium | Medium–High | Low–Medium–High |
|---|---|---|---|---|---|---|
| Mean | 4.25 | 6.25 | 5.58 | 5.92 | 5.00 | 5.50 |
| SD | 2.73 | 3.36 | 3.03 | 2.87 | 2.52 | 2.61 |
| SA | Low | Medium | High | Low–Medium | Medium–High | Low–Medium–High |
|---|---|---|---|---|---|---|
| Mean | 4.83 | 4.08 | 3.17 | 3.42 | 3.25 | 4.75 |
| SD | 2.54 | 2.25 | 1.91 | 2.33 | 1.92 | 2.65 |
| eHMI Information Content Conditions | Rankings | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| Medium–high | 0.33 | 0.17 | 0.00 | 0.33 | 0.08 | 0.08 |
| Low–medium–high | 0.33 | 0.08 | 0.08 | 0.08 | 0.08 | 0.33 |
| High | 0.25 | 0.08 | 0.08 | 0.17 | 0.25 | 0.17 |
| Low–medium | 0.00 | 0.50 | 0.17 | 0.08 | 0.25 | 0.00 |
| Low | 0.08 | 0.08 | 0.42 | 0.17 | 0.08 | 0.17 |
| Medium | 0.00 | 0.08 | 0.25 | 0.17 | 0.25 | 0.25 |
| eHMI Information Content Conditions | Rankings | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| Low–medium–high | 0.42 | 0.33 | 0.17 | 0.00 | 0.00 | 0.08 |
| Low–medium | 0.17 | 0.25 | 0.08 | 0.25 | 0.17 | 0.08 |
| Low | 0.17 | 0.00 | 0.50 | 0.00 | 0.25 | 0.08 |
| Medium–high | 0.17 | 0.08 | 0.17 | 0.33 | 0.08 | 0.17 |
| Medium | 0.00 | 0.08 | 0.08 | 0.33 | 0.42 | 0.08 |
| High | 0.08 | 0.25 | 0.00 | 0.08 | 0.08 | 0.50 |
| eHMI Information Content | Pros | Cons |
|---|---|---|
| Low-risk | (a) Adequate yet concise information that minimizes the need for extensive cognitive analysis and prevents excessive allocation of attentional resources. (b) Information timing that offers sufficient response time. (c) Low-risk eHMI signals contribute to reduced anxiety and increased pedestrian comfort. Full: P1, P2, P3, P5, P7, P8 Partial: P13, P15, P17, P21 | Since AVs are still at a considerable distance, pedestrians do not need to rely on eHMI to indicate “low risk” when making crossing decisions. Full: P6 Partial: P24 |
| Medium- risk | eHMI indicating medium crossing risk serves as a warning. Given that the medium crossing risk phase is the most uncertain, it is essential to provide a clear alert. Partial: P20 | An eHMI indicating only medium crossing risk, carries a high degree of ambiguity—leaving it unclear whether it signals permission to cross or a warning not to cross. Full: P1, P2, P3, P4, P6, P7, P8, Partial: P19 |
| High-risk | An eHMI indicating high crossing risk provides a crucial warning against crossing, thereby enhancing pedestrian safety during road-crossing decisions. Full: P4, P9, P12 Partial: P14, P16, P18, P19, P24 | (a) When eHMI indicates high crossing risk, the vehicle is already very close to the pedestrian, requiring an urgent response. (b) eHMI indicating high crossing risk, along with its corresponding warning color, induces a sense of fear in pedestrians. Full: P1, P2, P5 |
| Low-medium risk | (a) Information timing that offers sufficient response time. (b) Providing continuous information, which increases the level of certainty. Full: P2, P5 | In the low–medium eHMI condition, the medium risk information is unnecessary, as pedestrians would cross during the low risk period. Partial: P21 |
| Medium-high risk | The medium risk signal could serve as a transitional cue, helping participants anticipate the high-risk signal. Full: P9 Partial: P16, P24 | eHMI indicating medium and high crossing risk, along with its corresponding warning color, induces a sense of anxiety in pedestrians. Full: P1, P5, P10 Partial: P13, P17, P21 |
| Low-medium-high risk | (a) Provides continuous information, enhancing certainty. (b) Analogous to traffic lights, a familiar signal system for pedestrians. Full: P3, P6, P10, P11 Partial: P13, P20, P22, P23 | (a) Mentally demanding. (b) Rapid information changes lead to misjudgments. (c) High-risk information may be redundant, as medium-risk signals suffice. Full: P5 Partial: P14, P16, P19 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, F.; Sun, X.; Bai, J.; Liu, B.; Moreno Leyva, L.F.; Zhang, S. Assessing the Impact of Risk-Warning eHMI Information Content on Pedestrian Mental Workload, Situation Awareness, and Gap Acceptance in Full and Partial eHMI Penetration Vehicle Platoons. Appl. Sci. 2025, 15, 8250. https://doi.org/10.3390/app15158250
Yang F, Sun X, Bai J, Liu B, Moreno Leyva LF, Zhang S. Assessing the Impact of Risk-Warning eHMI Information Content on Pedestrian Mental Workload, Situation Awareness, and Gap Acceptance in Full and Partial eHMI Penetration Vehicle Platoons. Applied Sciences. 2025; 15(15):8250. https://doi.org/10.3390/app15158250
Chicago/Turabian StyleYang, Fang, Xu Sun, Jiming Bai, Bingjian Liu, Luis Felipe Moreno Leyva, and Sheng Zhang. 2025. "Assessing the Impact of Risk-Warning eHMI Information Content on Pedestrian Mental Workload, Situation Awareness, and Gap Acceptance in Full and Partial eHMI Penetration Vehicle Platoons" Applied Sciences 15, no. 15: 8250. https://doi.org/10.3390/app15158250
APA StyleYang, F., Sun, X., Bai, J., Liu, B., Moreno Leyva, L. F., & Zhang, S. (2025). Assessing the Impact of Risk-Warning eHMI Information Content on Pedestrian Mental Workload, Situation Awareness, and Gap Acceptance in Full and Partial eHMI Penetration Vehicle Platoons. Applied Sciences, 15(15), 8250. https://doi.org/10.3390/app15158250