
Practical Performance Assessment of Water Vapor Monitoring Using BDS PPP-B2b Service

 , ,
, ,
Abstract
1. Introduction
2. Data Description
2.1. GNSS Observations
2.2. GNSS Satellite Ephemeris
2.3. ERA5 Reanalysis
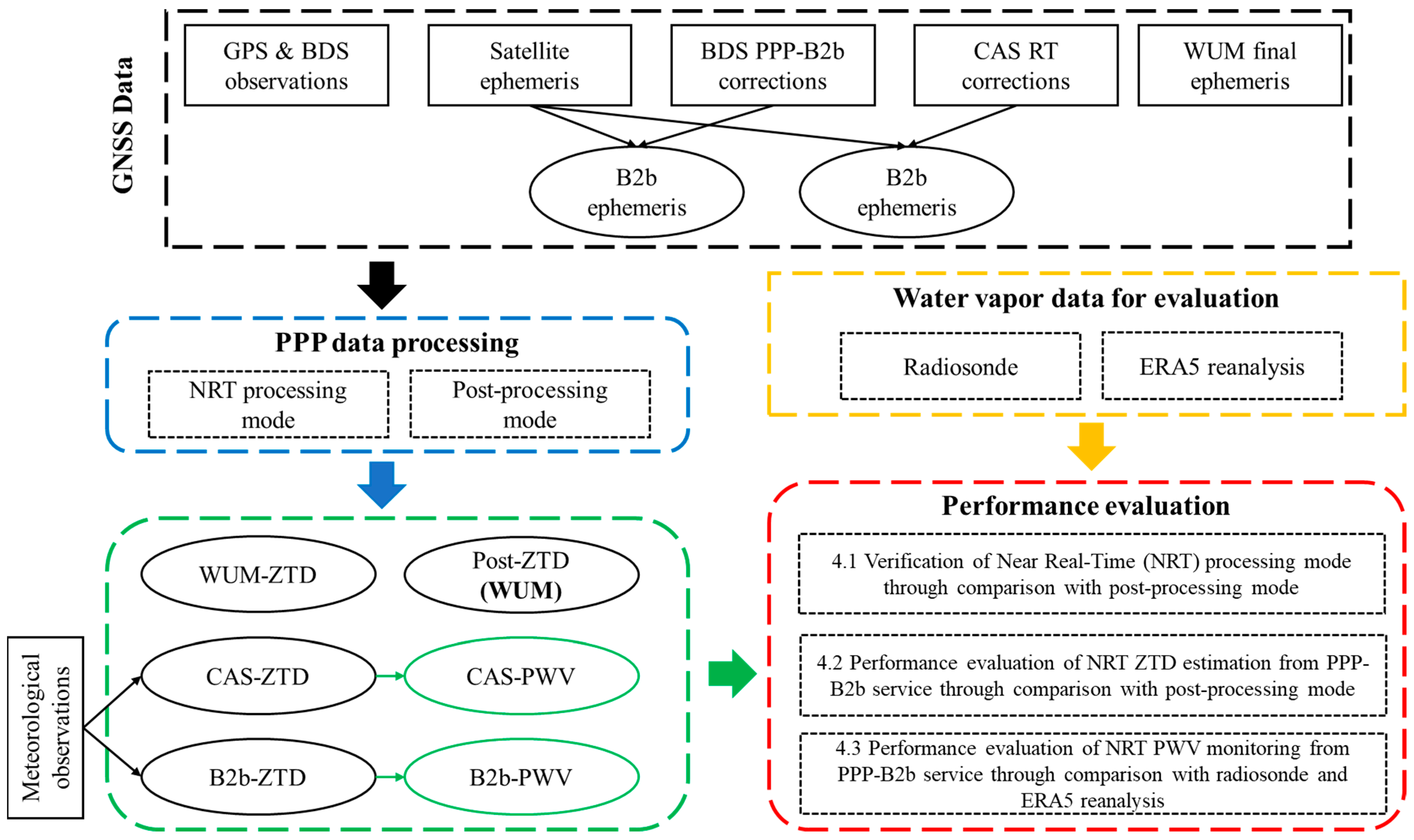
3. Methodology
3.1. GNSS Data Processing
3.2. PWV Conversion Based on Estimated ZTD
4. Results and Discussion
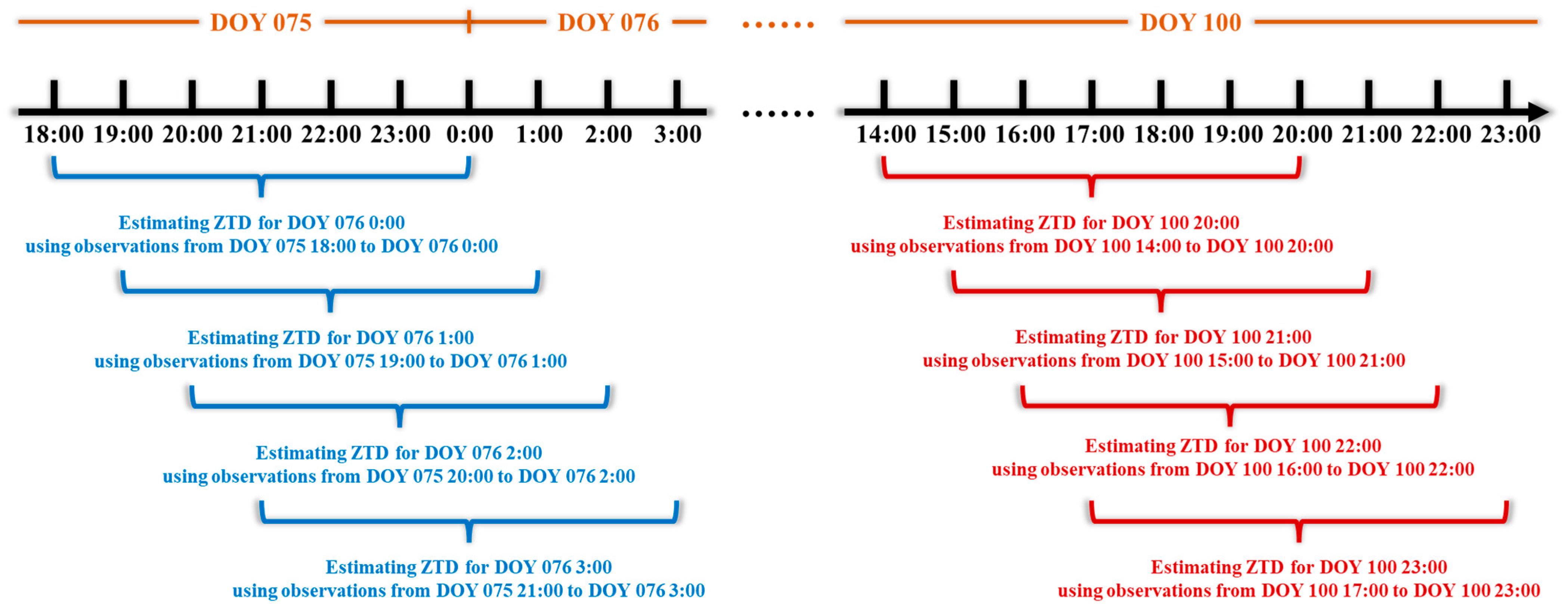
4.1. Verification of Near Real-Time (NRT) Processing Mode Through Comparison with Post-Processing Mode
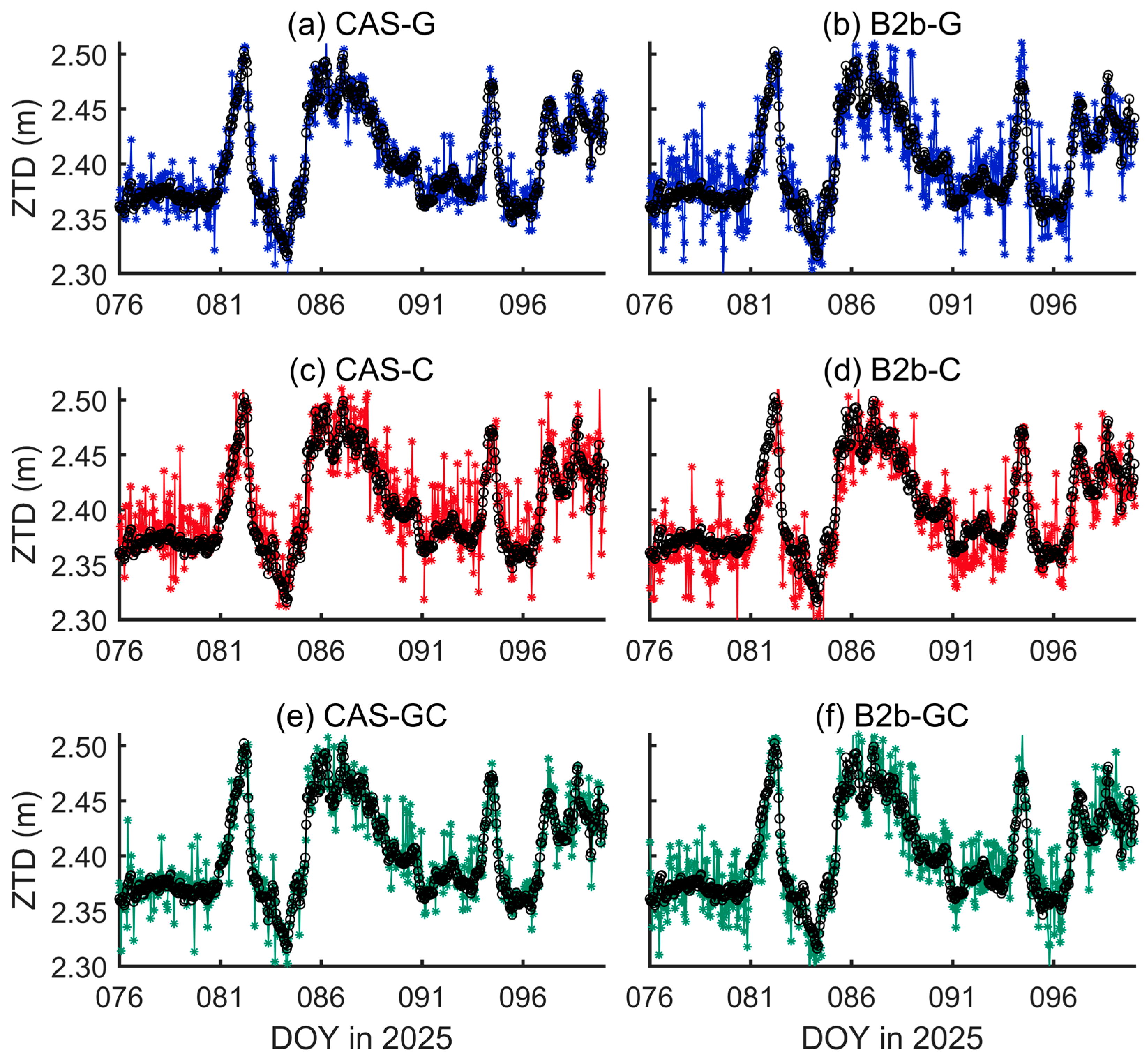
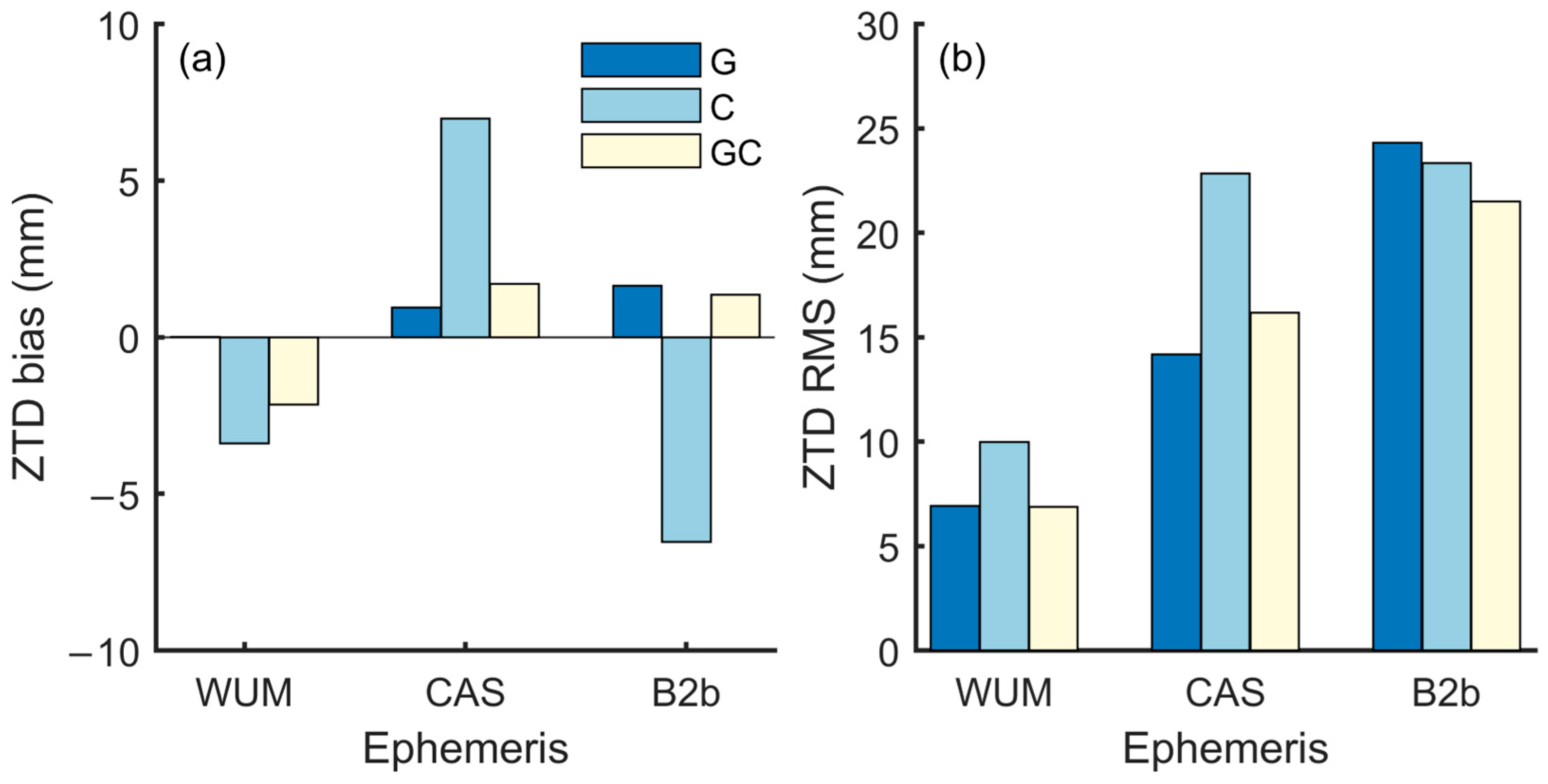
4.2. Performance Evaluation of NRT ZTD Estimation from PPP-B2b Service Through Comparison with Post-Processing Mode
4.3. Performance Evaluation of NRT PWV Monitoring from PPP-B2b Service Through Comparison with ERA5 Reanalysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BDS | BeiDou navigation satellite system |
| CAS | China Academy of Science |
| CDS | Climate Data Store |
| DOY | Day-of-Year |
| ECMWF | European Centre for Medium-Range Weather Forecasts |
| ERA5 | The Fifth Generation ECMWF Reanalysis |
| GEO | Geostationary Earth Orbit |
| GLONASS | GLObal NAvigation Satellite System |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| IGS | International GNSS Services |
| IPC | Industrial Personal Computer |
| NRT | Near Real-time |
| PPP | Precise Point Positioning |
| PWV | Precipitable Water Vapor |
| RT | Real-time |
| RTS | Real-Time Service |
| ZHD | Zenith Hydrostatic Delay |
| ZTD | Zenith Tropospheric Delay |
| ZWD | Zenith Wet Delay |
References
- Trenberth, K.E.; Christy, J.R.; Olson, J.G. Global atmospheric mass, surface pressure, and water vapor variations. J. Geophys. Res. Atmos. 1987, 92, 14815–14826. [Google Scholar] [CrossRef]
- Sherwood, S.C.; Roca, R.; Weckwerth, T.M.; Andronova, N.G. Tropospheric water vapor, convection, and climate. Rev. Geophys. 2010, 48, Rg2001. [Google Scholar] [CrossRef]
- Zhou, L.H.; Cao, Y.C.; Shi, C.; Liang, H.; Fan, L. Quantifying the Atmospheric Water Balance Closure over Mainland China Using Ground-Based, Satellite, and Reanalysis Datasets. Atmosphere 2024, 15, 497. [Google Scholar] [CrossRef]
- Neelin, J.D.; Martinez-Villalobos, C.; Stechmann, S.N.; Ahmed, F.; Chen, G.; Norris, J.M.; Kuo, Y.H.; Lenderink, G. Precipitation Extremes and Water Vapor Relationships in Current Climate and Implications for Climate Change. Curr. Clim. Change Rep. 2022, 8, 17–33. [Google Scholar] [CrossRef]
- Chen, X.L.; Xu, X.D.; Ma, Y.M.; Wang, G.L.; Chen, D.L.; Cao, D.B.; Xu, X.; Zhang, Q.; Li, L.H.; Liu, Y.J.; et al. Investigation of Precipitation Process in the Water Vapor Channel of the Yarlung Zsangbo Grand Canyon. Bull. Am. Meteorol. Soc. 2024, 105, e370–e386. [Google Scholar] [CrossRef]
- Liu, Y.; Yan, X.; Yao, Y.B.; Zhang, B.; Zhao, Q.Z.; Wang, X.Q.; E, S.L.; Zhang, L. Revealing the synergistic contribution of PWV and CAPE to extreme precipitation throughout China. Adv. Space Res. 2025, 75, 2739–2752. [Google Scholar] [CrossRef]
- Emardson, T.R.; Johansson, J.M. Spatial interpolation of the atmospheric water vapor content between sites in a ground-based GPS network. Geophys. Res. Lett. 1998, 25, 3347–3350. [Google Scholar] [CrossRef]
- Lu, C.X.; Chen, X.H.; Liu, G.; Dick, G.; Wickert, J.; Jiang, X.Y.; Zheng, K.; Schuh, H. Real-Time Tropospheric Delays Retrieved from Multi-GNSS Observations and IGS Real-Time Product Streams. Remote Sens. 2017, 9, 1317. [Google Scholar] [CrossRef]
- Zhou, L.H.; Fan, L.; Shi, C. Evaluation and Analysis of Remotely Sensed Water Vapor from the NASA VIIRS/SNPP Product in Mainland China Using GPS Data. Remote Sens. 2023, 15, 1528. [Google Scholar] [CrossRef]
- Ning, T.; Wang, J.; Elgered, G.; Dick, G.; Wickert, J.; Bradke, M.; Sommer, M.; Querel, R.; Smale, D. The uncertainty of the atmospheric integrated water vapour estimated from GNSS observations. Atmos. Meas. Tech. 2016, 9, 79–92. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the global positioning system. J. Geophys. Res. Atmos. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Maciejewska, A. Use of Tropospheric Delay in GNSS-Based Climate Monitoring-A Review. Remote Sens. 2025, 17, 1501. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Chiswell, S.; Herring, T.A.; Anthes, R.A.; Rocken, C.; Ware, R.H. GPS meteorology: Mapping zenith wet delays onto precipitable water. J. Appl. Meteorol. Climatol. 1994, 33, 379–386. [Google Scholar] [CrossRef]
- Zhang, W.X.; Lou, Y.D.; Cao, Y.C.; Liang, H.; Shi, C.; Huang, J.F.; Liu, W.X.; Zhang, Y.; Fan, B.B. Corrections of Radiosonde-Based Precipitable Water Using Ground-Based GPS and Applications on Historical Radiosonde Data Over China. J. Geophys. Res. Atmos. 2019, 124, 3208–3222. [Google Scholar] [CrossRef]
- Zhou, L.H.; Fan, L.; Shi, C.; Liang, H.; Cao, Y.C. Comprehensive analysis of zenith tropospheric delay and precipitable water vapor retrieved from BDS-3 B1C and B2a signals. Measurement 2025, 242, 116079. [Google Scholar] [CrossRef]
- Wang, M.H.; Wang, J.X.; Bock, Y.; Liang, H.; Dong, D.A.; Fang, P. Dynamic Mapping of the Movement of Landfalling Atmospheric Rivers Over Southern California With GPS Data. Geophys. Res. Lett. 2019, 46, 3551–3559. [Google Scholar] [CrossRef]
- Zhou, L.H.; Fan, L.; Zhang, W.X.; Shi, C. Long-term correlation analysis between monthly precipitable water vapor and precipitation using GPS data over China. Adv. Space Res. 2022, 70, 56–69. [Google Scholar] [CrossRef]
- Wu, Z.L.; Lu, C.X.; Liu, Y.; Lin, H.; Zheng, Y.X.; Wei, Q.; Liu, Y.X. Global statistical assessment of Haiyang-2B scanning microwave radiometer precipitable water vapor. Front. Earth Sci. 2023, 11, 1084285. [Google Scholar] [CrossRef]
- Wang, H.S.; Liu, Y.B.; Liu, Y.W.; Cao, Y.C.; Liang, H.; Hu, H.; Liang, J.S.; Tu, M.H. Assimilation of GNSS PWV with NCAR-RTFDDA to Improve Prediction of a Landfall Typhoon. Remote Sens. 2022, 14, 178. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, B.; Yao, Y.B.; Zhao, Q.Z.; Xu, C.Q.; Yan, X.; Zhang, L. Revealing the spatiotemporal patterns of water vapor and its link to North Atlantic Oscillation over Greenland using GPS and ERA5 data. Sci. Total Environ. 2024, 918, 170596. [Google Scholar] [CrossRef] [PubMed]
- Li, L.J.; Wu, S.Q.; Zhang, K.F.; Wang, X.M.; Li, W.; Shen, Z.; Zhu, D.T.; He, Q.M.; Wan, M.F. A new zenith hydrostatic delay model for real-time retrievals of GNSS-PWV. Atmos. Meas. Tech. 2021, 14, 6379–6394. [Google Scholar] [CrossRef]
- Li, H.J.; Li, X.M.; Kang, Q. Handling Method for Outages of IGS Real-Time Service (RTS) in GNSS Real-Time Sensing of Atmospheric Water Vapor. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 8310–8318. [Google Scholar] [CrossRef]
- Paz, J.M.A.; Mendoza, L.P.O.; Fernández, L.I. Near-real-time GNSS tropospheric IWV monitoring system for South America. GPS Solut. 2023, 27, 93. [Google Scholar]
- Wang, H.; He, J.X.; Wei, M.; Zhang, Z.D. Synthesis Analysis of One Severe Convection Precipitation Event in Jiangsu Using Ground-Based GPS Technology. Atmosphere 2015, 6, 908–927. [Google Scholar] [CrossRef]
- Du, M.B.; Cao, Y.C.; Liang, H.; Hu, H.; Wang, H.S.; Song, S.L.; Jiao, G.Q. Construction of a meteorological application system based on BDS ground-based augmentation network and water vapor products validation. GPS Solut. 2024, 28, 107. [Google Scholar] [CrossRef]
- Yang, Y.X.; Ding, Q.; Gao, W.G.; Li, J.L.; Xu, Y.Y.; Sun, B.J. Principle and performance of BDSBAS and PPP-B2b of BDS-3. Satell. Navig. 2022, 3, 5. [Google Scholar] [CrossRef]
- Yang, H.; He, X.F.; Ferreira, V.; Ji, S.Y.; Xu, Y.; Song, S.S. Assessment of precipitable water vapor retrieved from precise point positioning with PPP-B2b service. Earth Sci. Inf. 2023, 16, 315–328. [Google Scholar] [CrossRef]
- Cao, Y.C.; Cheng, Z.H.; Liang, J.S.; Zhao, P.P.; Cao, Y.C.; Wang, Y.Z. Performance of Ground-Based Global Navigation Satellite System Precipitable Water Vapor Retrieval in Beijing with the BeiDou B2b Service. Remote Sens. 2024, 16, 2902. [Google Scholar] [CrossRef]
- Wang, X.M.; Chen, Y.F.; Zhang, J.L.; Qiu, C.; Zhou, K.; Li, H.B.; Huang, Q.Y. Assessment of BDS-3 PPP-B2b Service and Its Applications for the Determination of Precipitable Water Vapour. Atmosphere 2024, 15, 1048. [Google Scholar] [CrossRef]
- Xu, Y.; Zhao, P.P.; Wang, J. Precipitable water vapor retrieval for rainfall forecasting using BDS-3 PPP-B2b signal in the coastal region of China. Meas. Sci. Technol. 2024, 35, 116309. [Google Scholar] [CrossRef]
- Zhou, P.Y.; Zhang, Z.K.; Liu, Z.J.; Lyu, D.; Xiao, G.R.; Xiao, K.; Du, L. Real-Time Precise Zenith Tropospheric Delay Estimation with BDS PPP-B2b, Galileo HAS, and QZSS MADOCA-PPP Services. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5802011. [Google Scholar] [CrossRef]
- Guo, J.; Xu, X.L.; Zhao, Q.L.; Liu, J.N. Precise orbit determination for quad-constellation satellites at Wuhan University: Strategy, result validation, and comparison. J. Geod. 2016, 90, 143–159. [Google Scholar] [CrossRef]
- Lee, Z.; Wang, L.; Wang, N.; Li, Y.; Liu, A.; Li, M.; Lee, Z. Performance Assessment and Integrity Support Information Estimation of CAS Real-time Orbits and Clocks Products. Geomat. Inf. Sci. Wuhan Univ. 2024, 1–19. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Zhang, W.X.; Lou, Y.D.; Zhou, Y.Z.; Liu, M.J.; Zhang, Z.Y.; Ou, S.Y.; Liu, J.N. GNSS meteorological ensemble tools (GMET): A free-access online service for GNSS meteorological applications. GPS Solut. 2024, 28, 202. [Google Scholar] [CrossRef]
- Byun, S.H.; Bar-Sever, Y.E. A new type of troposphere zenith path delay product of the international GNSS service. J. Geod. 2009, 83, 367–373. [Google Scholar] [CrossRef]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging satellites. Geophys. Monogr. 1972, 15, 247–251. [Google Scholar]
- Landskron, D.; Böhm, J. VMF3/GPT3: Refined discrete and empirical troposphere mapping functions. J. Geod. 2018, 92, 349–360. [Google Scholar] [CrossRef] [PubMed]
- Lu, C.X.; Feng, G.L.; Zheng, Y.X.; Zhang, K.K.; Tan, H.; Dick, G.; Wickert, J. Real-Time Retrieval of Precipitable Water Vapor from Galileo Observations by Using the MGEX Network. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4743–4753. [Google Scholar] [CrossRef]
- Shi, C.; Guo, S.W.; Fan, L.; Gu, S.F.; Fang, X.Q.; Zhou, L.H.; Zhang, T.; Li, Z.; Li, M.; Li, W.W.; et al. GSTAR: An innovative software platform for processing space geodetic data at the observation level. Satell. Navig. 2023, 4, 18. [Google Scholar] [CrossRef]
- Yao, Y.B.; Zhang, B.; Xu, C.Q.; Chen, J.J. Analysis of the global Tm-Ts correlation and establishment of the latitude-related linear model. Chin. Sci. Bull. 2014, 59, 2340–2347. [Google Scholar] [CrossRef]
- Lu, C.X.; Li, X.X.; Nilsson, T.; Ning, T.; Heinkelmann, R.; Ge, M.R.; Glaser, S.; Schuh, H. Real-time retrieval of precipitable water vapor from GPS and BeiDou observations. J. Geod. 2015, 89, 843–856. [Google Scholar] [CrossRef]
- Zhou, L.H.; Fan, L.; Guo, S.W.; Shi, C. Assessing the feasibility of atmospheric water vapor monitoring with standalone BDS receiver. Environ. Monit. Assess. 2025, 197, 66. [Google Scholar] [CrossRef] [PubMed]
- Tang, C.P.; Hu, X.G.; Chen, J.P.; Liu, L.; Zhou, S.S.; Guo, R.; Li, X.J.; He, F.; Liu, J.H.; Yang, J.H. Orbit determination, clock estimation and performance evaluation of BDS-3 PPP-B2b service. J. Geod. 2022, 96, 60. [Google Scholar] [CrossRef]
- Wang, J.H.; Zhang, L.Y.; Dai, A.; Van Hove, T.; Van Baelen, J. A near-global, 2-hourly data set of atmospheric precipitable water from ground-based GPS measurements. J. Geophys. Res. Atmos. 2007, 112, D11107. [Google Scholar] [CrossRef]
- Shi, C.; Zhou, L.H.; Fan, L.; Zhang, W.X.; Cao, Y.C.; Wang, C.; Xiao, F.; Lü, G.Q.; Liang, H. Analysis of “21·7” extreme rainstorm process in Henan Province using BeiDou/GNSS observation. Chin. J. Geophys. 2022, 65, 186–196. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Title 1 | Post-Processing Mode | NRT Processing Mode |
|---|---|---|
| Data length for processing | 24 h | 6 h window |
| Processing interval | 30 s | 30 s |
| Satellite ephemeris | WUM | WUM (for verification) CAS or B2b (for evaluation) |
| Estimator | Least-squares (LSQ) + backward smoothing | |
| Tropospheric priori model | Saastamoinen + GPT3 | |
| Mapping function | VMF3 | |
| Stochastic model for ZTD | Estimated as piece-wise constant every 3600 s with random walk process between pieces (20 mm/sqrt(h)) | |
| Horizontal tropospheric gradients | Estimated as constant | |
| Receiver coordinates | Tightly constrained to double-differenced solutions | |
| Receiver clock offsets | Estimated as white noise | |
| Ambiguity | Estimated as arc-constant | |
| Ephemeris | Satellite Combinations | Bias (mm) | RMS (mm) |
|---|---|---|---|
| GPS-only (G) | −0.34 | 2.94 | |
| CAS | BDS-only (C) | −1.32 | 4.36 |
| GPS and BDS (GC) | −0.29 | 3.46 | |
| GPS-only (G) | −0.23 | 4.55 | |
| B2b | BDS-only (C) | 0.96 | 4.40 |
| GPS and BDS (GC) | −0.29 | 3.95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, L.; Zhang, E.; Liang, H.; Hu, Z.; Qu, M.; Li, X.; Cao, Y. Practical Performance Assessment of Water Vapor Monitoring Using BDS PPP-B2b Service. Appl. Sci. 2025, 15, 8033. https://doi.org/10.3390/app15148033
Zhou L, Zhang E, Liang H, Hu Z, Qu M, Li X, Cao Y. Practical Performance Assessment of Water Vapor Monitoring Using BDS PPP-B2b Service. Applied Sciences. 2025; 15(14):8033. https://doi.org/10.3390/app15148033
Chicago/Turabian StyleZhou, Linghao, Enhong Zhang, Hong Liang, Zuquan Hu, Meifang Qu, Xinxin Li, and Yunchang Cao. 2025. "Practical Performance Assessment of Water Vapor Monitoring Using BDS PPP-B2b Service" Applied Sciences 15, no. 14: 8033. https://doi.org/10.3390/app15148033
APA StyleZhou, L., Zhang, E., Liang, H., Hu, Z., Qu, M., Li, X., & Cao, Y. (2025). Practical Performance Assessment of Water Vapor Monitoring Using BDS PPP-B2b Service. Applied Sciences, 15(14), 8033. https://doi.org/10.3390/app15148033