
Computerised Method of Multiparameter Optimisation of Predictive Control Algorithms for Asynchronous Electric Drives

 ,
,  , , and
, , and
Abstract
1. Introduction
1.1. Relevance of the Topic and Research Motivation
1.2. Analysis of the Latest Research and Publications
1.3. Aim, Objectives, Object, and Subject of the Study
- –
- Analysis of the influence of the main parameters of the prediction algorithm (length of the prediction horizon, sampling step, number of iterations, indicators of the loss function) on the efficiency of electric drive control in the dynamic mode;
- –
- Development of a computer model that allows for conducting a series of simulation experiments to identify and configure the parameters of predictive control tools, followed by a comparative analysis of the results in terms of accuracy, computation time, and energy efficiency;
- –
- Studying the feasibility of using the taxonomic method as a basic mechanism for the multiparameter selection of optimal combinations of control parameters;
- –
- Analysis of computer experiment results at qualitative and quantitative levels for different sets of parameters in order to identify those configurations that provide the best balance between speed, accuracy, and energy consumption;
- –
- Validation of the obtained research results through a series of simulation experiments with a modelled load on the electric drive and variable control settings.
2. Materials and Methods
- –
- Accuracy of system operation in accordance with a given reference trajectory;
- –
- Computation time;
- –
- Energy consumption.
3. Results
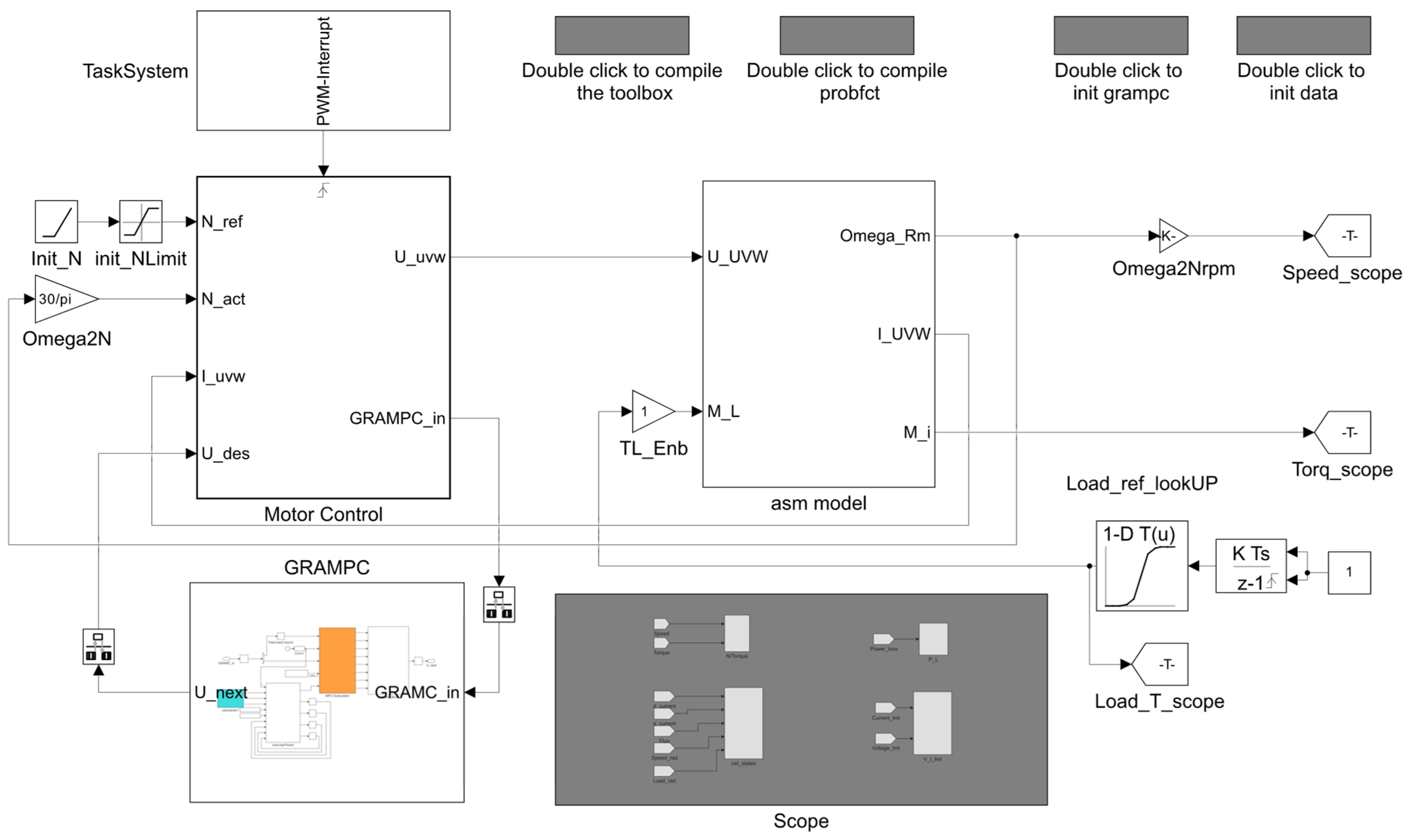
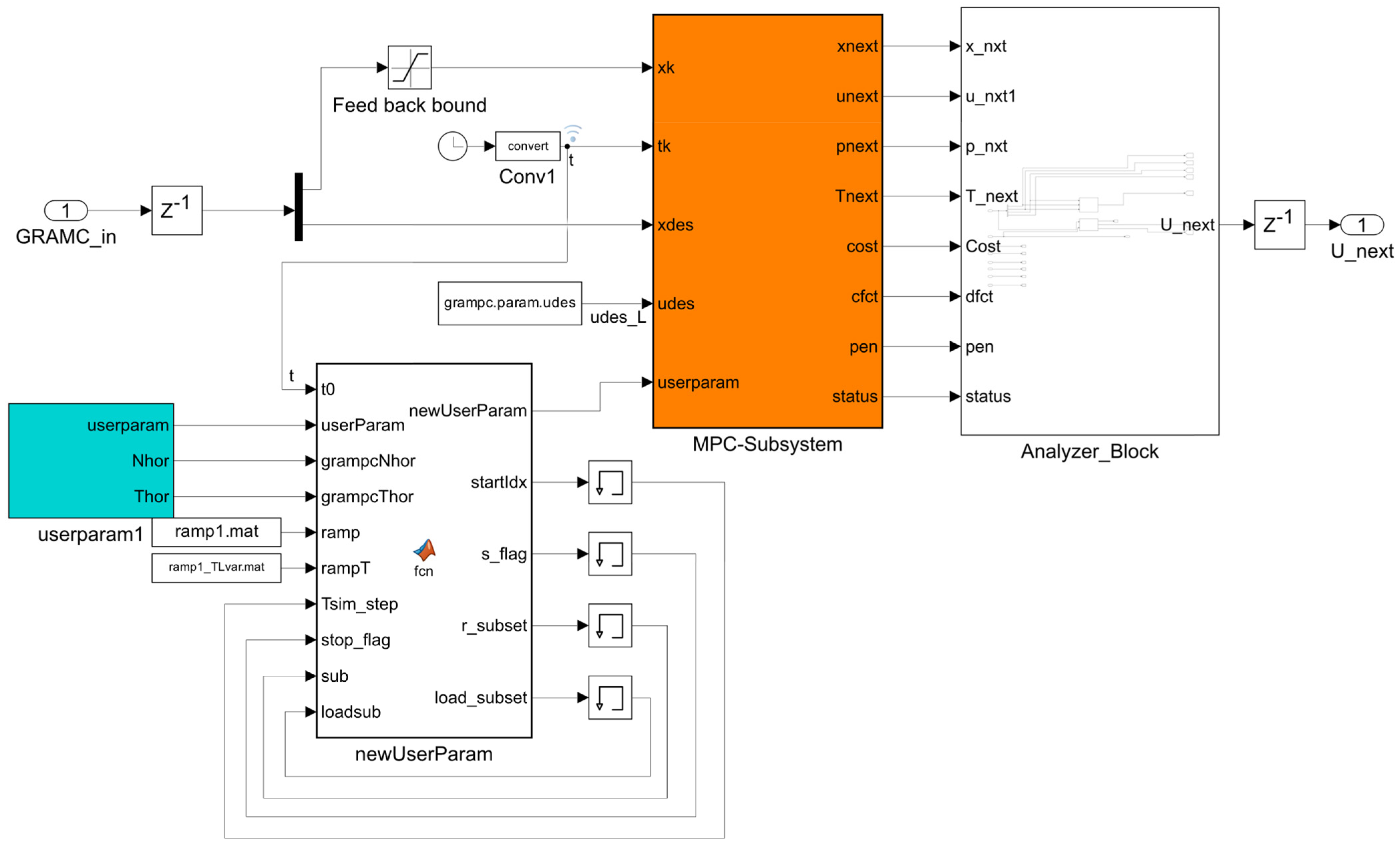
3.1. Computer Model
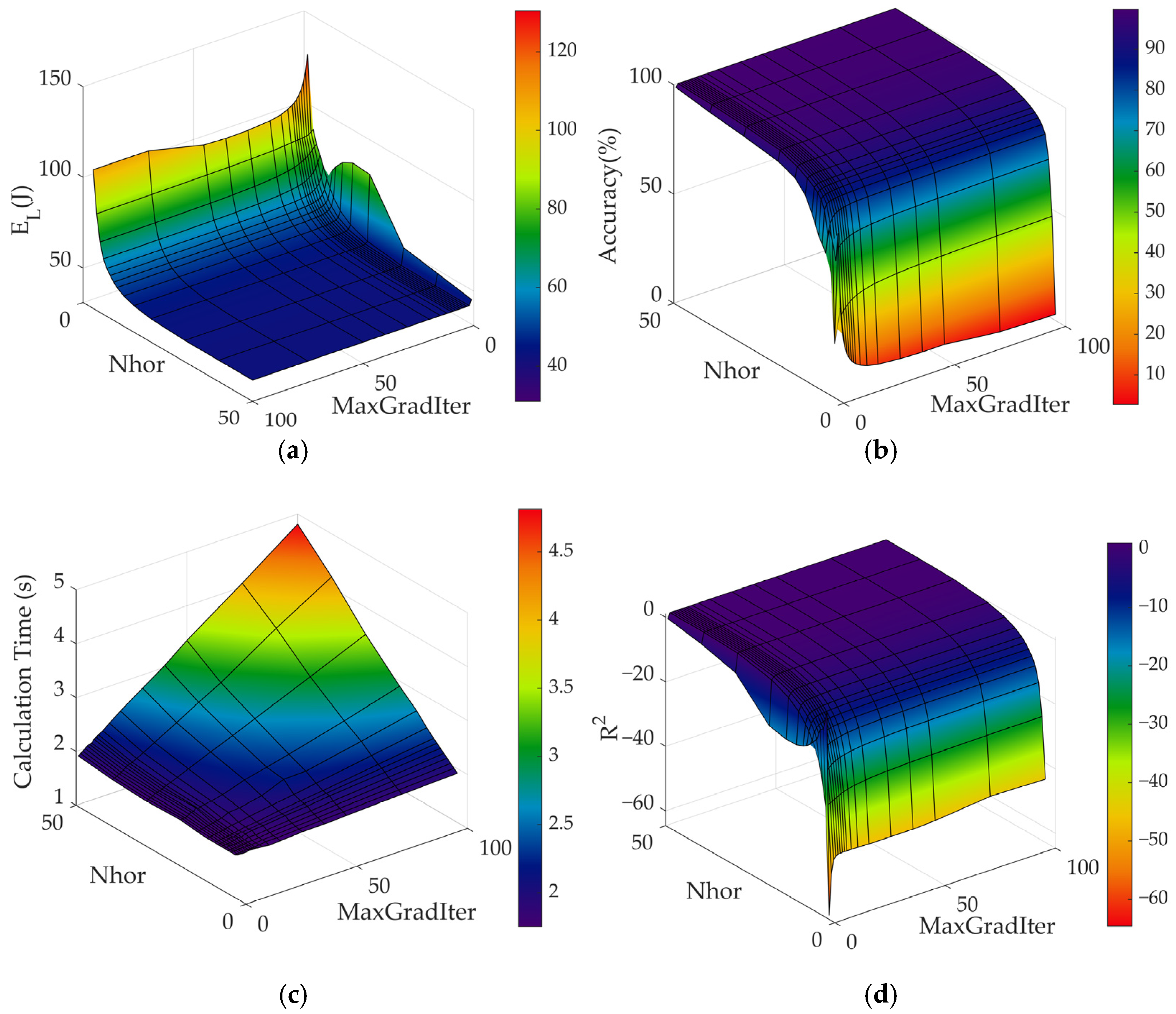
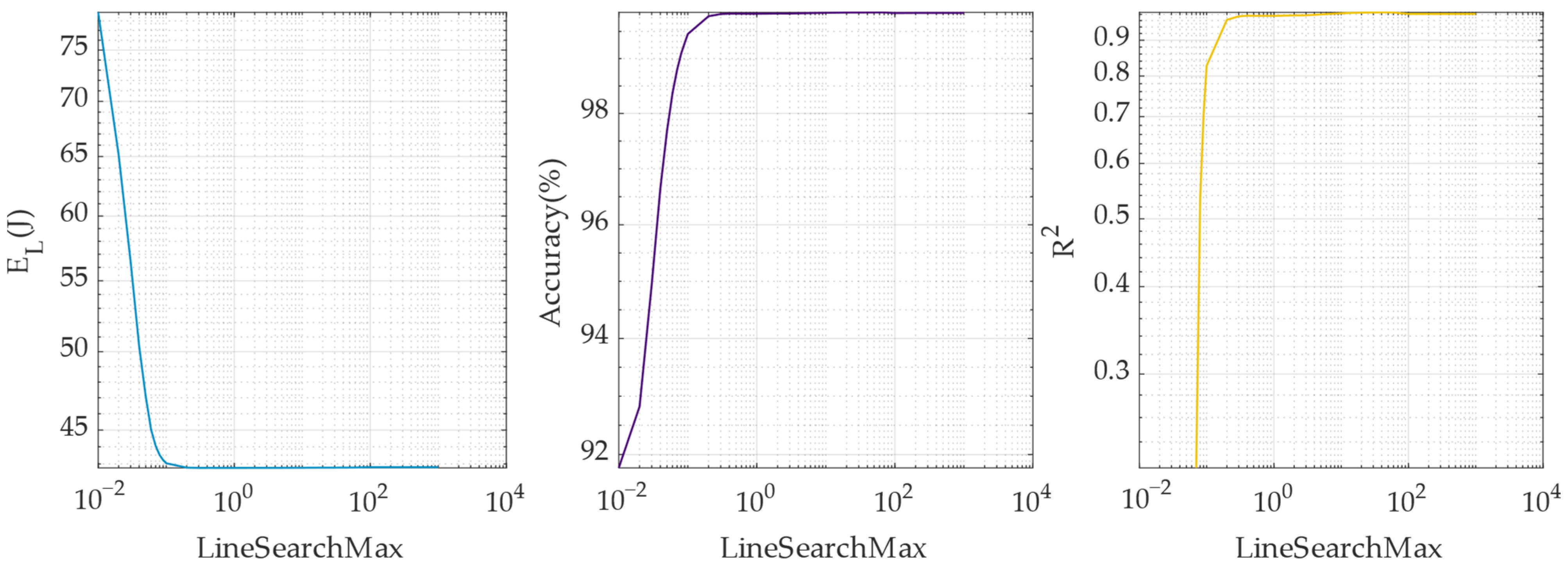
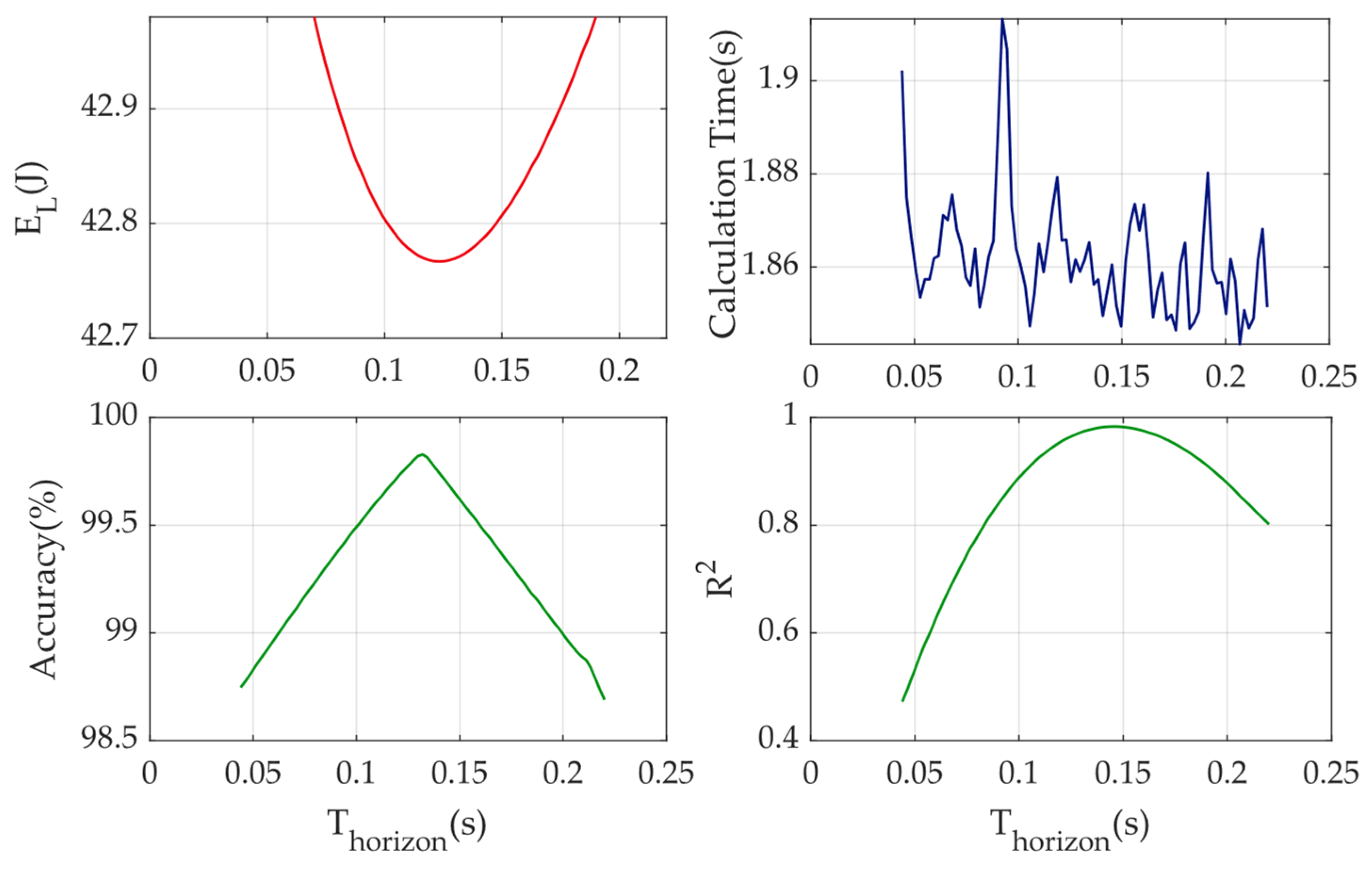
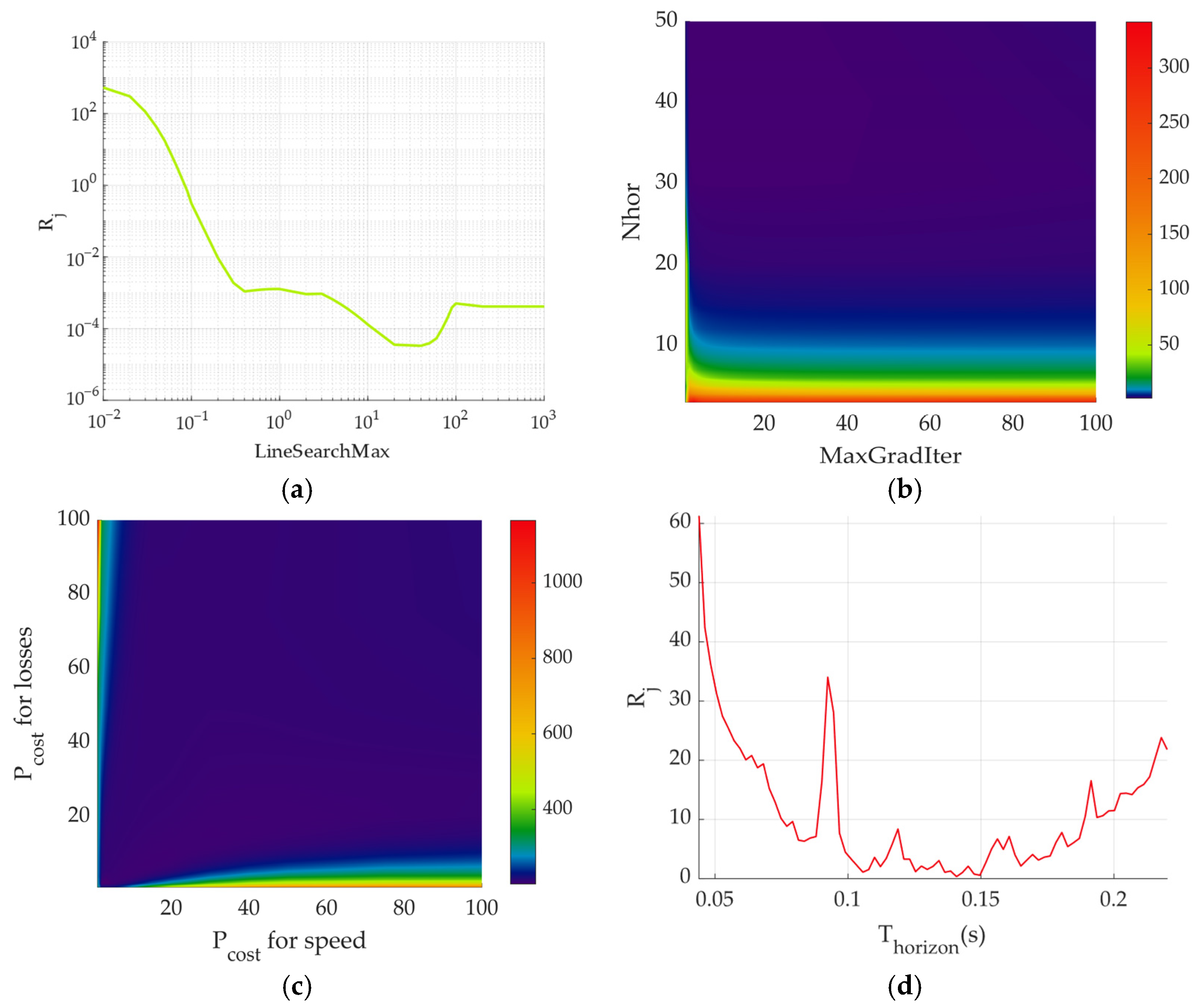
3.2. Results of the Analysis of the Influence of the Prediction Algorithm Parameters
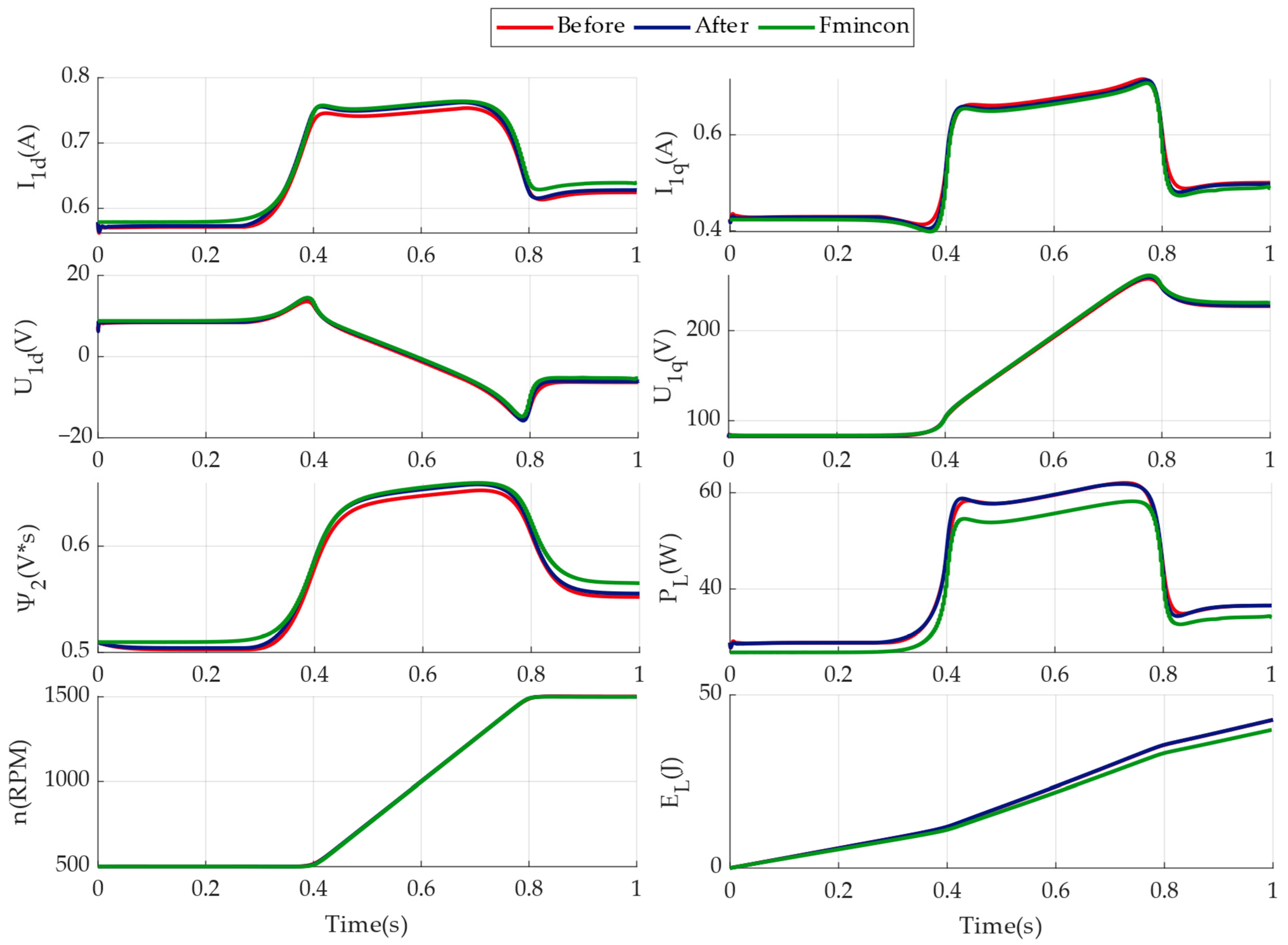
3.3. Results of Applying the Taxonomic Approach and Simulation Experiment

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Initial Guess | Optimal Values |
|---|---|---|
| Nhorizon | 50 | 50 |
| NMaxGradIter | 2 | 2 |
| PCost (loss) | 10 | 2 |
| PCost (speed) | 5 | 2 |
| Thorizon | 0.1302 | 0.1408 |
| LineSearchMax | 0.5 | 40 |
4. Discussion and Prospects for Further Research
- –
- Scaling up the proposed method by introducing hybrid methods, specifically by using neural networks and machine learning methods for automatic real-time adjustment of predictive models;
- –
- Researching the effectiveness of the developed method in regards to electric drives with other types of motors;
- –
- Validating and adjusting the results obtained based on practical experiments in various industry applications;
- –
- Integrating the developed approach into modern automation and digitalisation complexes for production and technological processes.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Koval, V.; Kryshtal, H.; Udovychenko, V.; Soloviova, O.; Froter, O.; Kokorina, V.; Veretin, L. Review of mineral resource management in a circular economy infrastructure. Min. Miner. Depos. 2023, 17, 61–70. [Google Scholar] [CrossRef]
- Farrag, M.; Lai, C.S.; Darwish, M.; Taylor, G. Improving the Efficiency of Electric Vehicles: Advancements in Hybrid Energy Storage Systems. Vehicles 2024, 6, 1089–1113. [Google Scholar] [CrossRef]
- Rjabtšikov, V.; Rassõlkin, A.; Kudelina, K.; Kallaste, A.; Vaimann, T. Review of Electric Vehicle Testing Procedures for Digital Twin Development: A Comprehensive Analysis. Energies 2023, 16, 6952. [Google Scholar] [CrossRef]
- Roy, S.; Pandey, R. A Review on Motor and Drive System for Electric Vehicle. In Planning of Hybrid Renewable Energy Systems, Electric Vehicles and Microgrid; Bohre, A.K., Chaturvedi, P., Kolhe, M.L., Singh, S.N., Eds.; Energy Systems in Electrical Engineering; Springer: Singapore, 2022; pp. 601–628. [Google Scholar] [CrossRef]
- Statista: Estimated Number of Electric Vehicles in Use Worldwide Between 2016 and 2023. Available online: https://www.statista.com/statistics/1101415/number-of-electric-vehicles-by-type/#statisticContainer (accessed on 11 June 2025).
- Krupa, T.M.; Koraddi, S.; Raju, A.B. Model Predictive Torque Control of Induction Motor for Electric Vehicle Application. In Proceedings of the 2024 International Conference on Innovation and Novelty in Engineering and Technology (INNOVA), Vijayapura, India, 20–21 December 2024; pp. 1–5. [Google Scholar] [CrossRef]
- Luo, J.; Huang, W.; Zhang, S. Energy cost optimal operation of belt conveyors using model predictive control methodology. J. Clean. Prod. 2015, 105, 196–205. [Google Scholar] [CrossRef]
- Reis, A.L.; Andrade-Campos, A.; Matos, P.; Antunes, C.H.; Lopes, M.A.R. An energy and cost efficiency Model Predictive Control framework to optimize Water Supply Systems operation. Appl. Energy 2025, 384, 125478. [Google Scholar] [CrossRef]
- Gallert, B.; Choi, G.; Jing, X.; Lee, K.; Son, Y. Maximum efficiency control strategy of PM traction machine drives in GM hybrid and electric vehicles. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 566–571. [Google Scholar] [CrossRef]
- Piriienko, S.; Ammann, U.; Neuburger, M.; Bertele, F.; Röser, T.; Balakhontsev, A.; Neuberger, N.; Cheng, P.-W. Influence of the control strategy on the efficiency of SynRM-based small-scale wind generators. In Proceedings of the 2019 IEEE International Conference on Industrial Technology (ICIT), Melbourne, Australia, 13–15 February 2019; pp. 280–285. [Google Scholar] [CrossRef]
- Fan, Y.; Ma, H.; Zhu, G.; Luo, J. Improved MTPA and MTPV optimal criteria analysis based on IPMSM nonlinear flux-linkage model. Energies 2024, 17, 3494. [Google Scholar] [CrossRef]
- Sinchuk, O.; Strzelecki, R.; Beridze, T.; Peresunko, I.; Baranovskyi, V.; Kobeliatskyi, D.; Zapalskyi, V. Model studies to identify input parameters of an algorithm controlling electric supply/consumption process by underground iron ore enterprises. Min. Miner. Depos. 2023, 17, 93–101. [Google Scholar] [CrossRef]
- Lorenz, R.D.; Yang, S.M. Efficiency–Optimized Flux Trajectories for Closed–Cycle Operation of Field-Orientation Induction Machine Drives. In Proceedings of the Conference Record of the 1988 IEEE Industry Applications Society Annual Meeting, Pittsburgh, PA, USA, 2–7 October 1988; pp. 457–462. [Google Scholar] [CrossRef]
- Lorenz, R.D.; Yang, S.M. AC Induction Servo Sizing for Motion Control Applications via Loss Minimizing Real–Time Flux Control. IEEE Trans. Ind. Appl. 1992, 28, 589–593. [Google Scholar] [CrossRef]
- Klenke, F.; Hofmann, W. Energy-Efficient Control of Induction Motor Servo Drives with Optimized Motion and Flux Trajectories. In Proceedings of the Proceedings of the 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–7.
- Weis, R.; Gensior, A. A Model-Based Loss-Reduction Scheme for Transient Operation of Induction Machines. In Proceedings of the 2016 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 5–9 September 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Alitasb, G.K. Integer PI, Fractional PI and Fractional PI data trained ANFIS Speed Controllers for Indirect Field Oriented Control of Induction Motor. Heliyon 2024, 10, e37822. [Google Scholar] [CrossRef]
- Nandy, S.; Das, S.; Pal, A. Online Golden Section Method based Loss Minimization Scheme for Direct Torque Controlled Induction Motor Drive. In Proceedings of the 2018 8th IEEE India International Conference on Power Electronics (IICPE), Jaipur, India, 13–15 December 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Sahoo, A.; Jena, R. Loss model based controller of fuzzy DTC driven induction motor for electric vehicles using optimal stator flux. e-Prime Adv. Electr. Eng. Electron. Energy 2023, 6, 100304. [Google Scholar] [CrossRef]
- Englert, T.; Graichen, K. Nonlinear model predictive torque control and setpoint computation of induction machines for high performance applications. Control Eng. Pract. 2020, 99, 104415. [Google Scholar] [CrossRef]
- Janisch, G.; Kugi, A.; Kemmetmüller, W. A high-performance model predictive torque control concept for induction machines for electric vehicle applications. Control Eng. Pract. 2024, 153, 106128. [Google Scholar] [CrossRef]
- Brix, A.; Muller, V.; Hofmann, W. Energy Efficient Predictive Rotor Flux Control of Induction Machines in Autonomous Driving Electric Vehicles. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Abdelati, R.; Mimouni, M.F. Optimal control strategy of an induction motor for loss minimization using Pontryaguin principle. Eur. J. Control 2019, 49, 94–106. [Google Scholar] [CrossRef]
- Meleshko, Y.; Raskin, L.; Semenov, S.; Sira, O. Methodology of probabilistic analysis of state dynamics of multi-dimensional semi-Markov dynamic systems. East Eur. J. Enterp. Technol. 2019, 6, 6–13. [Google Scholar] [CrossRef]
- Moskalenko, V.; Kharchenko, V.; Semenov, S. Model and Method for Providing Resilience to Resource-Constrained AI-System. Sensors 2024, 24, 5951. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, C.; Wang, Q.; Dong, S.; Xiao, A. Research on Simplified Design of Model Predictive Control. Actuators 2025, 14, 191. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, Y.; Liang, X.; Guo, H.; Zhuang, X. Robust Model Predictive Current Control of PMSM Based on Nonlinear Extended State Observer. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 862–873. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, L. A Simple Motor-Parameter-Free Model Predictive Voltage Control for PMSM Drives Based on Incremental Model. IEEE J. Emerg. Sel. Top. Power Electron. 2024, 12, 2845–2854. [Google Scholar] [CrossRef]
- Jaguemont, J.; Darwiche, A.; Bardé, F. Model Predictive Control Using an Artificial Neural Network for Fast-Charging Lithium-Ion Batteries. World Electr. Veh. J. 2025, 16, 231. [Google Scholar] [CrossRef]
- Li, Y.; Liu, L. Physics-Informed Neural Network-Based Nonlinear Model Predictive Control for Automated Guided Vehicle Trajectory Tracking. World Electr. Veh. J. 2024, 15, 460. [Google Scholar] [CrossRef]
- Schullerus, G. Modellprädiktive dynamisch energieeffiziente Betriebsführung einer Asynchronmaschine. In Proceedings of the SPS IPC DRIVES 2014, Nürnberg, Germany, 25–27 November 2014; pp. 366–374. (In German). [Google Scholar]
- GRAMPC Documentation Version 2.2. Available online: https://sourceforge.net/p/grampc/blog/2019/10/grampc-v22/ (accessed on 5 June 2025).
- Samorodov, B.V. Modification of the taxonomic method with regard to the competence of experts in the rating of banks. Bull. Ukr. Acad. Bank. 2011, 2, 62–67. (In Ukrainian) [Google Scholar]
- Dominic, A.; Schullerus, G.; Winter, M. Optimal Flux and Current Trajectories for Efficient Operation of Induction Machines. In Proceedings of the 2019 20th International Symposium on Power Electronics (Ee), Novi Sad, Serbia, 23–26 October 2019; pp. 1–6. [Google Scholar] [CrossRef]

| Parameter | Value | Parameter | Value |
|---|---|---|---|
| PN | 370 W | TN | 2.59 Nm |
| Zp | 2 | JM | 22 × 10−4 kg·m2 |
| nN | 1370 rpm | ||
| R1 | 27.8 Ω | Lσ | 0.142 H |
| R2 | 20 Ω | Lμ | 0.88 H |
| P1 | −0.669 | P4 | 4.415 |
| P2 | 3.606 | P5 | −0.743 |
| P3 | −6.622 | P6 | 0.754 |
| C1 | 0.0013 | C2 | 0.5778 |
| 52.36 rad/s ≅ 500 rpm | 157 rad/s ≅ 1500 rpm |
| Parameter | Before | After |
|---|---|---|
| I1d (A) | 97.54 | 99.01 |
| I1q (A) | 98.89 | 99.61 |
| Ψ2 (V*s) | 97.72 | 99.05 |
| n (rpm) | 100.00 | 100.00 |
| Nhorizon + NMaxGradIter | PCosts | Thorizon | LineSearchMax | |
|---|---|---|---|---|
| EL (J) | 5 | 5 | 1 | 5 |
| Ns, Accuracy (%) | 5 | 5 | 1 | 5 |
| Ts, Calculation time (s) | 0.01 | - | 1 | 0 |
| R2 | 10 | 1 | 1 | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Diachenko, G.; Semenov, S.; Marczak, K.; Schullerus, G.; Laktionov, I. Computerised Method of Multiparameter Optimisation of Predictive Control Algorithms for Asynchronous Electric Drives. Appl. Sci. 2025, 15, 8014. https://doi.org/10.3390/app15148014
Diachenko G, Semenov S, Marczak K, Schullerus G, Laktionov I. Computerised Method of Multiparameter Optimisation of Predictive Control Algorithms for Asynchronous Electric Drives. Applied Sciences. 2025; 15(14):8014. https://doi.org/10.3390/app15148014
Chicago/Turabian StyleDiachenko, Grygorii, Serhii Semenov, Katarzyna Marczak, Gernot Schullerus, and Ivan Laktionov. 2025. "Computerised Method of Multiparameter Optimisation of Predictive Control Algorithms for Asynchronous Electric Drives" Applied Sciences 15, no. 14: 8014. https://doi.org/10.3390/app15148014
APA StyleDiachenko, G., Semenov, S., Marczak, K., Schullerus, G., & Laktionov, I. (2025). Computerised Method of Multiparameter Optimisation of Predictive Control Algorithms for Asynchronous Electric Drives. Applied Sciences, 15(14), 8014. https://doi.org/10.3390/app15148014