1. Introduction
Acoustic metamaterials are artificially structured materials composed of subwavelength-scale units that enable unusual control over acoustic wave propagation. These systems have attracted significant attention for their ability to realize engineered phenomena such as refraction, absorption, reflection, transmission suppression, and bandgap formation, supporting diverse applications including ultrasound imaging, noise mitigation, acoustic cloaking, and energy harvesting, and have been the focus of extensive investigation in the context of periodic and resonant designs [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17].
Rigid materials have traditionally served as the basis for many acoustic metamaterial designs, enabling frequency-selective manipulation but imposing limitations in terms of structural deformability, adaptability to dynamic environments, and impedance matching [
18]. Furthermore, fundamental physical constraints rooted in the causality of linear time-invariant systems place limits on the attainable bandwidth and thickness trade-offs in passive absorbers. In response to these limitations, recent studies have increasingly explored the use of soft and deformable materials for acoustic control [
19,
20,
21].
Recent reviews of acoustic metamaterials have established classification frameworks based on tuning mechanisms (mechanical, electrical, etc.), structural types (membrane, Helmholtz, etc.), and operational modes such as passive and active operation. While these reviews illuminate specific aspects through their respective criteria, they face limitations in comprehensively capturing the complex characteristics of soft metamaterials, where multiple physical factors interact simultaneously.
Table 1 summarizes representative prior reviews and their classification criteria, highlighting the scope and focus of each work.
Table 1.
Classification of prior reviews by scope and classification criteria.
Table 1.
Classification of prior reviews by scope and classification criteria.
| Author | Year | Scope of Review | Classification Criteria |
|---|
| Chen et al. [2] | 2018 | AMs | Theories, Structures, Fabrication Approaches, Applications |
| Gao et al. [3] | 2022 | Tunable AMS | Tuning Mechanisms, Structural Types, Applications |
| Liao et al. [7] | 2021 | AMs | Passive and Active Systems |
| Zabihi et al. [19] | 2023 | Tunable and Programmable Systems | Mechanical Tuning, Active Control, Field-Responsive Materials |
To address these limitations, this review introduces the concept of soft acoustic metamaterials (SAMs) as a distinct category that includes systems composed of soft materials or reconfigurable architectures. The term “soft” is adopted from the field of soft robotics, referring not only to material properties such as low-modulus elastomers and gels but also to the ability of the entire structure to deform and interact compliantly with external environments [
22,
23]. In SAMs, such material or structural softness is not incidental but serves as a functional mechanism that enables acoustic manipulation by dynamically tuning key properties such as resonance frequency, wave path, and impedance. SAMs span a wide range of implementations, from entirely passive configurations that rely on intrinsic mechanical properties to systems that actively respond to external control inputs through the integration of actuators or sensors. Additionally, tunable systems that allow post-fabrication adjustment of properties using external stimuli such as static voltage or pre-applied strain combine features of both passive and active approaches while occupying a unique position in terms of operational flexibility.
To provide a coherent classification of the growing diversity in SAM research, we organize these systems along three conceptually independent but complementary dimensions. The first dimension is geometric configuration, which determines how the structure interacts with the acoustic field. SAMs are classified as either planar metasurfaces or bulk-type architectures. Metasurfaces are thin, two-dimensional systems that control wavefronts primarily at boundaries using surface-patterned features [
24,
25,
26]. In contrast, bulk-type SAMs interact volumetrically with acoustic waves, enabling broadband absorption, direction-dependent propagation, and spatial sound manipulation. This integrated perspective provides a foundation for systematically explaining the inherent interactivity and multifunctional operational capabilities of soft systems, transcending conventional single-axis classifications.
The second dimension of classification focuses on the dominant physical mechanism by which acoustic control is achieved [
27,
28]. These mechanisms include local resonance, phase manipulation, amplitude attenuation, and structural reconfiguration. For example, systems based on membrane–mass units or Helmholtz resonators rely on subwavelength resonance, whereas those based on gradient index designs or delay-unit cells manipulate the phase of wave propagation [
29,
30,
31,
32,
33,
34]. Other systems achieve amplitude modulation through lossy components or tunable acoustic resistors, and some utilize geometric deformation to dynamically alter acoustic pathways [
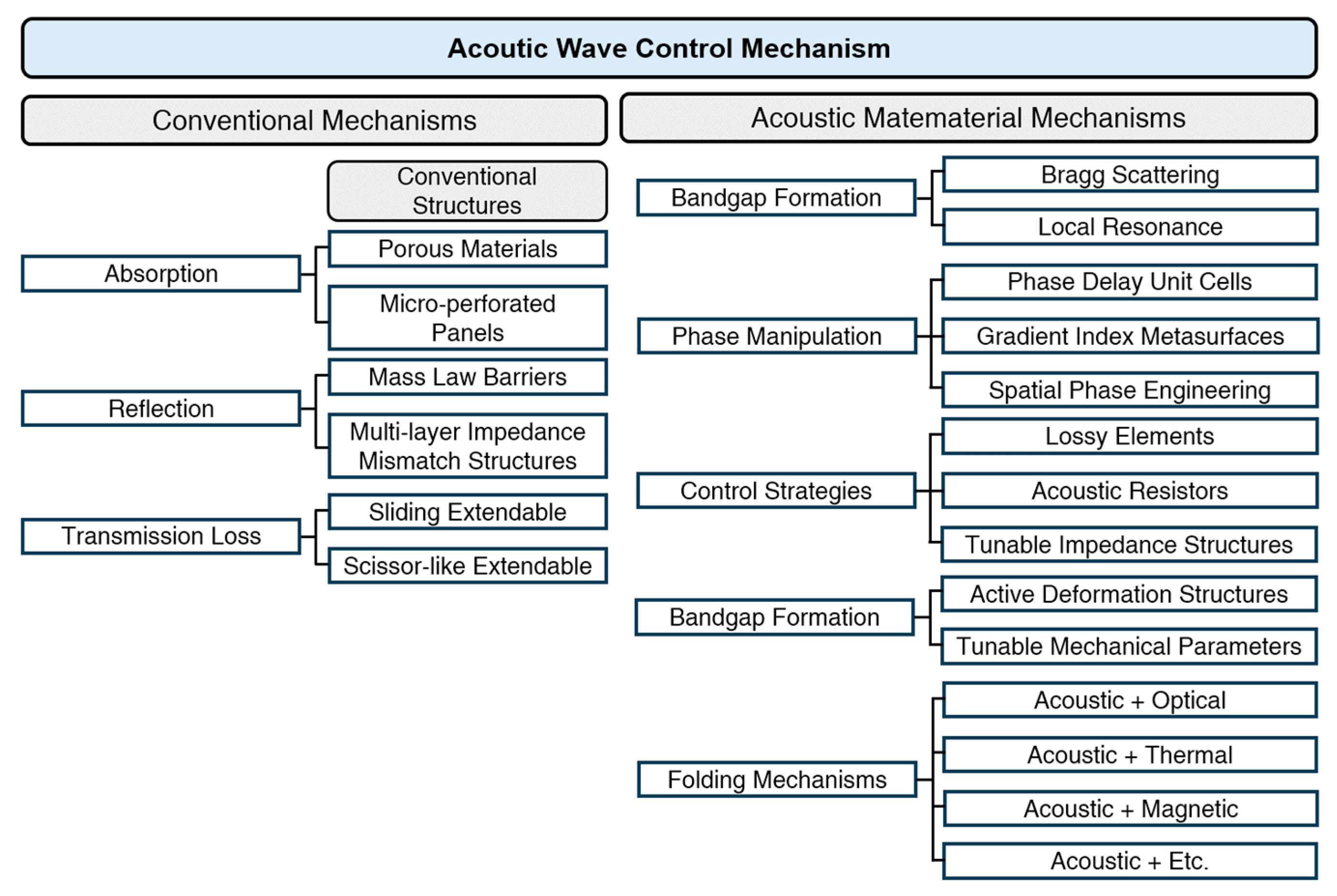
35]. A summary of conventional and acoustic metamaterial mechanisms is illustrated in
Figure 1.
The third dimension addresses functional responsiveness, which refers to how systems behave in the presence of external stimuli. This classification clarifies the distinction between responsiveness and tunability—two related but distinct attributes. Responsiveness indicates how actively a system responds to external stimuli; passive systems react to environmental changes such as temperature and deformation without external power, while active systems can adjust properties in real time through electrical, magnetic, or pneumatic stimuli with feedback control. Tunability, on the other hand, refers to the ability to adjust structural or physical properties post-fabrication, encompassing both passive adjustments (e.g., rotation, compression) and active adjustments.
These two attributes are interrelated but not identical. Tunability and activeness are distinct but potentially intersecting attributes; their presence within a system is governed by implementation-specific factors rather than inherent coupling. This review systematically analyzes these overlaps and differences, providing examples of practical implementation approaches and performance trade-offs. Through this analysis, we emphasize that soft metamaterial design is not merely functional insertion but represents a systemic integration of structure, material, control, and response.
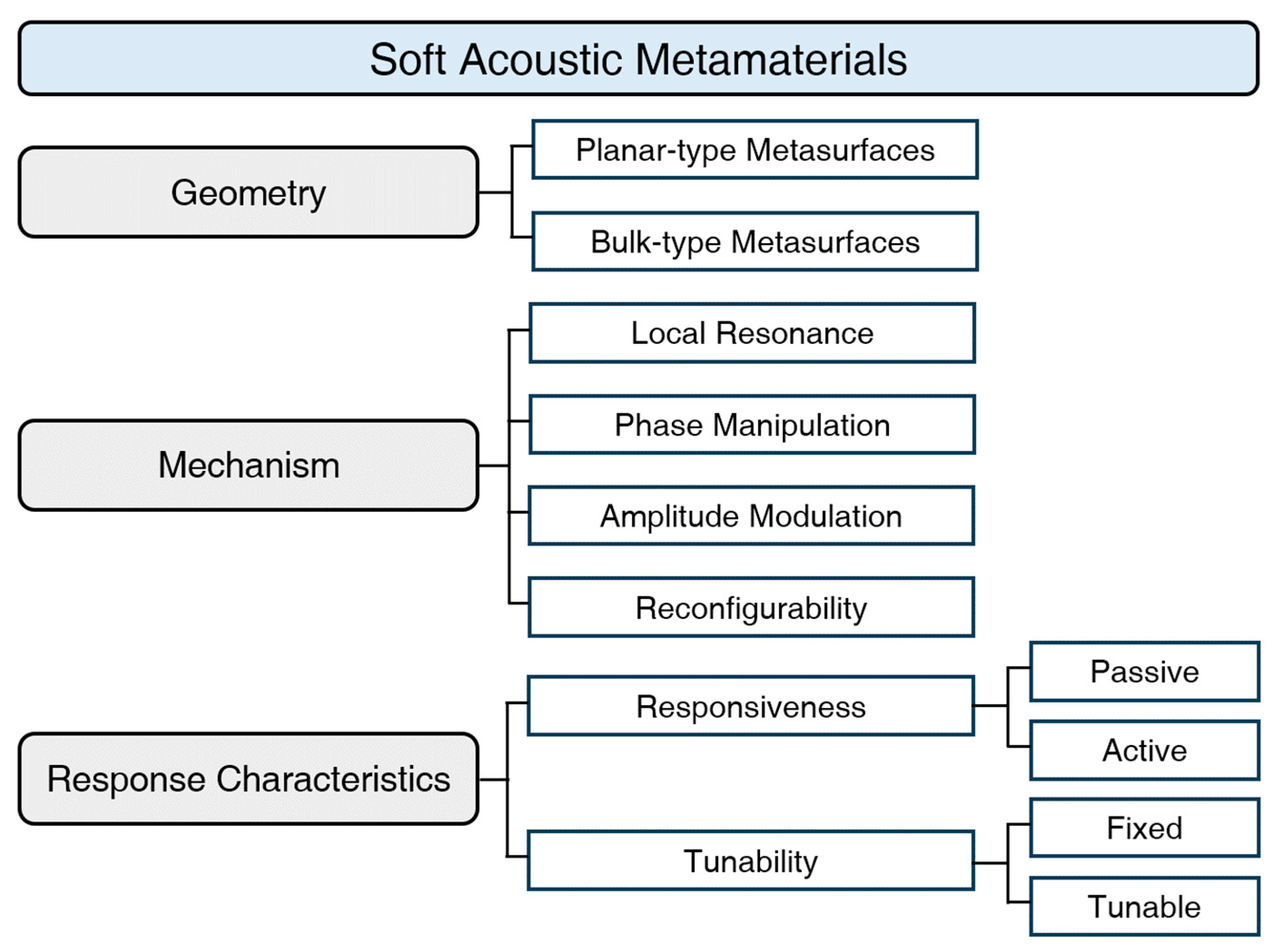
Importantly, these functional attributes are not determined solely by the material itself but by how it is implemented within the system. For instance, dielectric elastomer actuators and shape memory polymers may be employed in either active or tunable configurations depending on their integration and control strategy. The relationships among geometry, mechanism, and responsiveness are summarized in
Figure 2, which provides a structural overview of how SAMs are classified in this review.
By articulating how geometric flexibility, physical mechanisms, and dynamic responsiveness collectively define the behavior of SAMs, this review provides practical insight into the design of future adaptive acoustic systems and multifunctional platform integration. This framework is intended to clarify distinctions among existing systems, enable meaningful comparisons, and guide the development of next-generation soft acoustic metamaterials.
2. Acoustic Metasurfaces
Acoustic Metasurfaces are two-dimensional engineered structures that manipulate sound waves by controlling their phase, amplitude, or spatial distribution on a planar surface [
36]. Due to their subwavelength thickness, these structures offer advantages in terms of lightweight design and ease of integration. In this study, soft acoustic metasurfaces are categorized based on their sound manipulation mechanism and functional characteristics into five types: resonance-based, phase-modulating, amplitude-modulating, sound insulation or active, and multifunctional systems, as summarized in
Table 2. This classification reflects differences in both the underlying physical mechanisms and the degrees of responsiveness and tunability exhibited by each system.
As shown in
Table 2, tunability is not inherently determined by whether a system is categorized as active or passive. Passive systems can exhibit tunable acoustic properties through material nonlinearities or geometrical reconfiguration, whereas some active systems may operate with fixed acoustic responses despite external actuation. This indicates that tunability should be considered an independent functional dimension rather than a subset of actuation type. Likewise, multifunctional capabilities, which involve the simultaneous realization of distinct acoustic functionalities, can be achieved through both passive and active strategies depending on system design. These considerations support the need for a classification scheme that separates actuation mechanisms from functional properties such as tunability and multifunctionality.
In addition to these functional classifications,
Table 3 presents a comparison of representative acoustic metasurface systems in terms of their absorption coefficient, structural thickness, and resonance frequency, highlighting the trade-offs between acoustic performance and physical compactness.
Table 2.
Classification of SAMs by mechanism, responsiveness, tunability, and structure.
Table 2.
Classification of SAMs by mechanism, responsiveness, tunability, and structure.
| Author | Year | Sound Manipulation
Mechanism | Responsiveness Type | Tunability | Structure |
|---|
Chen et al.
[37] | 2017 | Resonance-based | Active | Yes | Membrane-mas with
back cavity |
Li et al.
[38] | 2019 | Resonance-based | Active | No | Membrane with
central mass |
Tang et al.
[39] | 2018 | Resonance-based | Active | Yes | Membrane with
magnetic mass |
Shrestha et al.
[40] | 2021 | Phase modulating | Active | Yes | Micro-perforated DEA with rigid glass backplate |
Jin et al.
[41] | 2019 | Phase modulating | Passive | No | Gradient porous film with
rigid frame |
Ma et al.
[42] | 2018 | Phase modulating | Active | Yes | Membrane with
central mass array |
Walker et al.
[43] | 2019 | Phase modulating | Passive | Yes | Hybrid membrane:
Thermo-responsive polyurethane/silicone film |
Sun et al.
[44] | 2024 | Amplitude modulating | Active | Yes | Gradient porous film
with rigid frame |
Tian et al.
[45] | 2024 | Phase-amplitude
modulating | Active | Yes | Composite PAP |
Xia et al.
[46] | 2022 | Sound Insulation | Passive | Yes | Magnetorheological
membrane with central mass |
Table 3.
Classification of Acoustic Metasurfaces by absorption coefficient, thickness, and resonance frequency.
Table 3.
Classification of Acoustic Metasurfaces by absorption coefficient, thickness, and resonance frequency.
| Author | Absorption Coefficient (α) | Thickness (mm) | Resonance Frequency (Hz) |
|---|
| Shrestha et al. [40] | 1-layered inactive
>0.8 (831 Hz–1180 Hz)
2-layered inactive
>0.8 (846 Hz–1290 Hz) | Membrane: 0.125
Backspace: 40 | - |
| Tang et al. [47] | 0.988 (235.5 Hz)
0.930 (483.2 Hz)
0.988 (763.6 Hz)
0.930 (936.2 Hz)
0.982 (998.9 Hz) | 0.2 per each membrane | 235.5
483.2
763.6
936.2
998.9 |
| Sun et al. [44] | 0.97 (615 Hz) | 2 | 563–615 |
2.1. Resonance-Based Metasurfaces
Resonance-based acoustic metasurfaces incorporate local resonators within unit cells to induce strong sound absorption, reflection, or scattering at targeted frequencies, particularly in the low-frequency regime. Typical configurations include Helmholtz resonators, membrane–mass systems, and micro-slit structures [
48,
49,
50,
51]. Recent advances have extended this concept by integrating soft materials such as elastic membranes and tunable nanocomposites, allowing for active modulation of resonance behavior through external stimuli like magnetic fields, electric fields, or temperature changes. These designs provide high absorption efficiency relative to their physical thickness, enabling acoustic cutoff bands or frequency-selective sound insulation effects. Structural parameters that control the resonant (or anti-resonant) frequency include membrane tension, slit geometry, or material stiffness [
52].
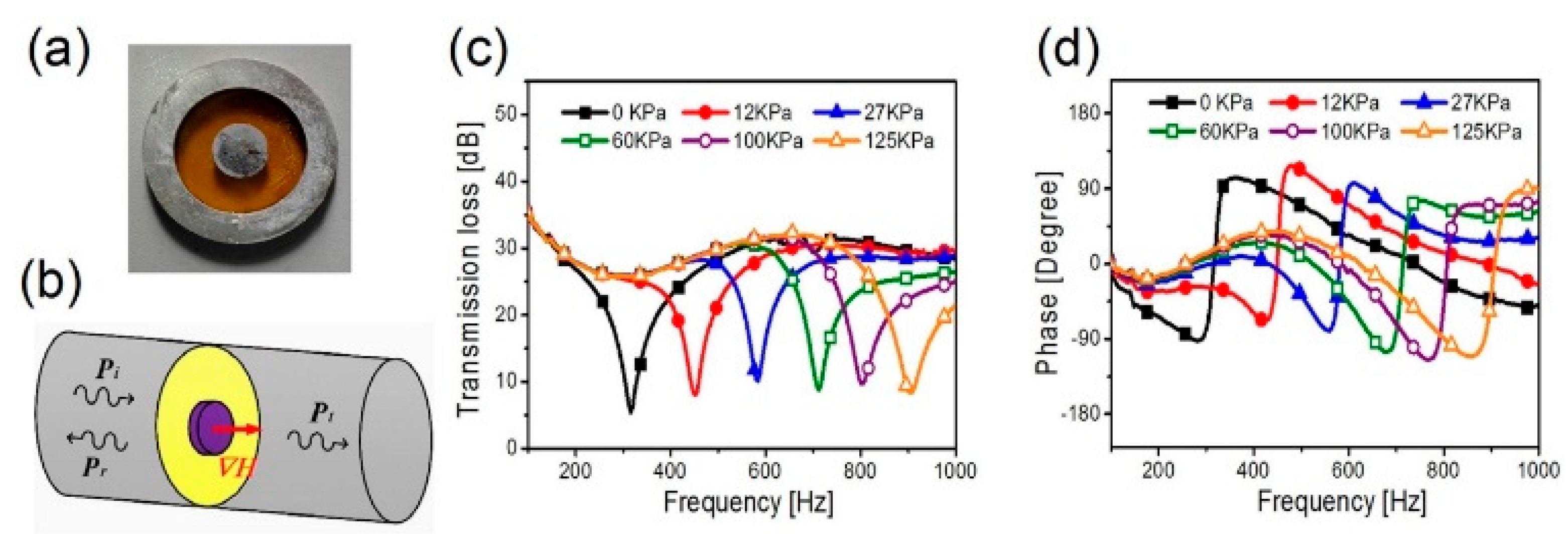
Chen et al. presented a membrane-based acoustic metasurface that uses a magnetic control mechanism to regulate low-frequency sound waves [
37]. This metasurface achieves a broad tuning range of resonant frequencies, from 316 Hz without magnetic force to 904 Hz under maximum magnetic pressure. A 6-mm-diameter iron disk, acting as a central mass, is attached to a 0.1-mm-thick elastic membrane with a radius of 10 mm. The overall structure is illustrated in
Figure 3. The membrane is supported by an aluminum ring with an outer diameter of 29 mm, and the entire unit is backed by a rigid cavity of 10 mm depth. In this work, polyamide was used as the membrane material, while rigid components included the iron disk, aluminum frame, and back cavity structure. Experimental results confirmed the significant frequency shift enabled by the magnetic stimulus. This metasurface enables redirection, focusing, and diffraction of low-frequency acoustic waves without physical structural changes, leveraging geometric nonlinearity and reflection-based control. The system operates under an active mechanism using static magnetic fields, allowing real-time control. Simultaneously, it exhibits tunability through post-fabrication adjustment of resonant frequency and phase delay via magnetic force modulation. The numerical analysis was conducted using COMSOL Multiphysics, based on a structure composed of a linearly elastic membrane and a central mass. A fixed boundary condition was applied to the rim of the membrane, while a uniform initial stress was applied across the entire membrane to simulate pre-stretching under geometric nonlinearity. The magnetic force was modeled as a boundary load acting on the surface of the central mass. Plane wave radiation and periodic conditions in the y-direction were employed for acoustic analysis. For simulations involving oblique incidence, such as focusing or wave bending, perfectly matched layers (PMLs) and background pressure fields were added to suppress boundary reflections. Structural deformation was analyzed using geometrically nonlinear static analysis, while acoustic responses were computed using linear acoustic–structure coupling in the frequency domain.
Li et al. proposed a membrane-based acoustic metasurface with a central mass, in which the resonant frequency can be tuned by adjusting membrane tension through an external magnetic field [
38]. A nanocomposite membrane made of poly (vinyl alcohol)/graphene (PVA/GR) and an aluminum central mass was used within a plastic frame to support the structure. This configuration enables strong low-frequency absorption and qualifies the system as active, based on the use of static magnetic control. In addition, the nanocomposite membrane shifts its resonant frequency in response to temperature changes induced by DC voltage, thereby effectively attenuating sound. The ability to modulate the magnetic field after fabrication also provides tunability in the resonant response.
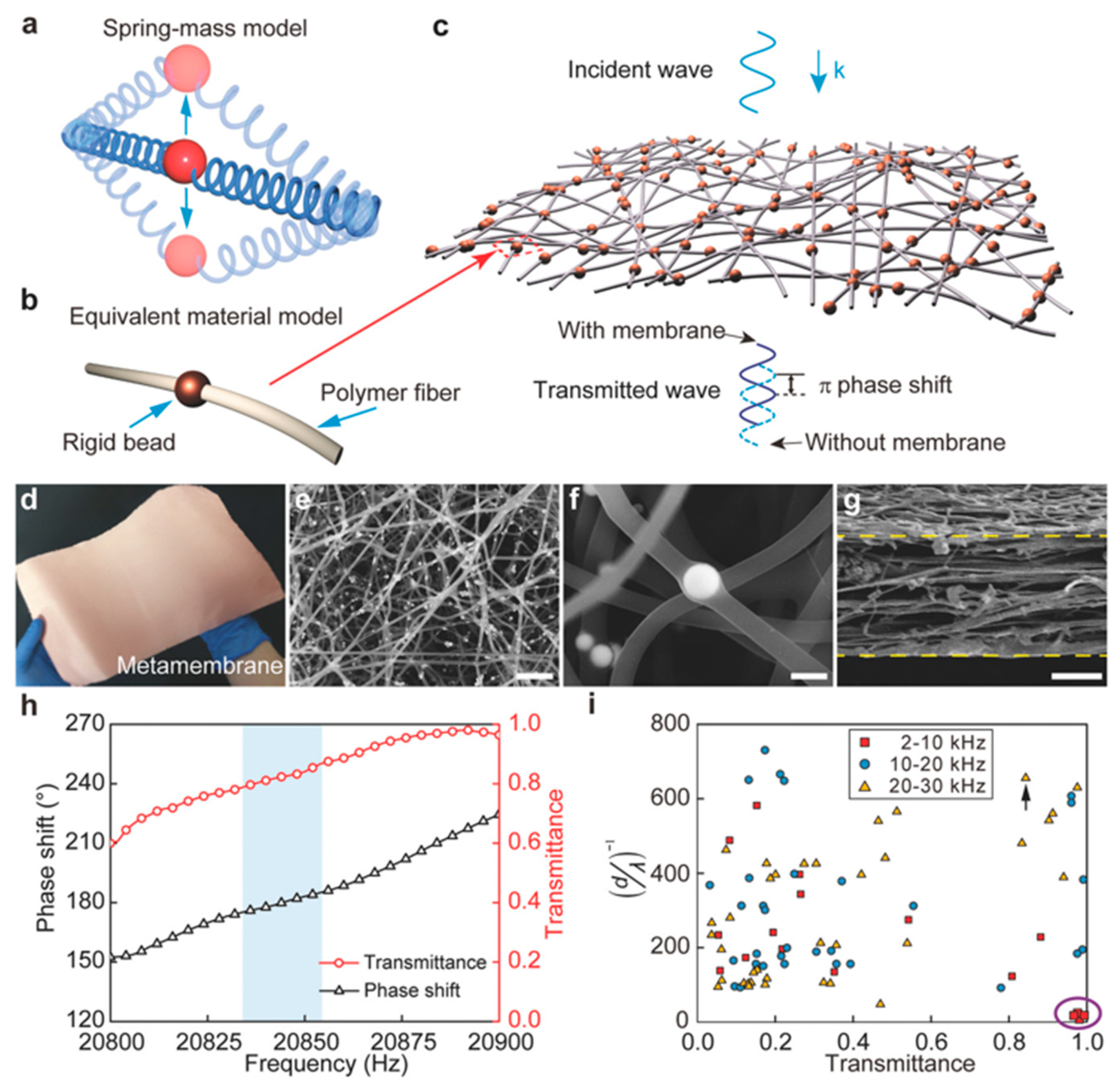
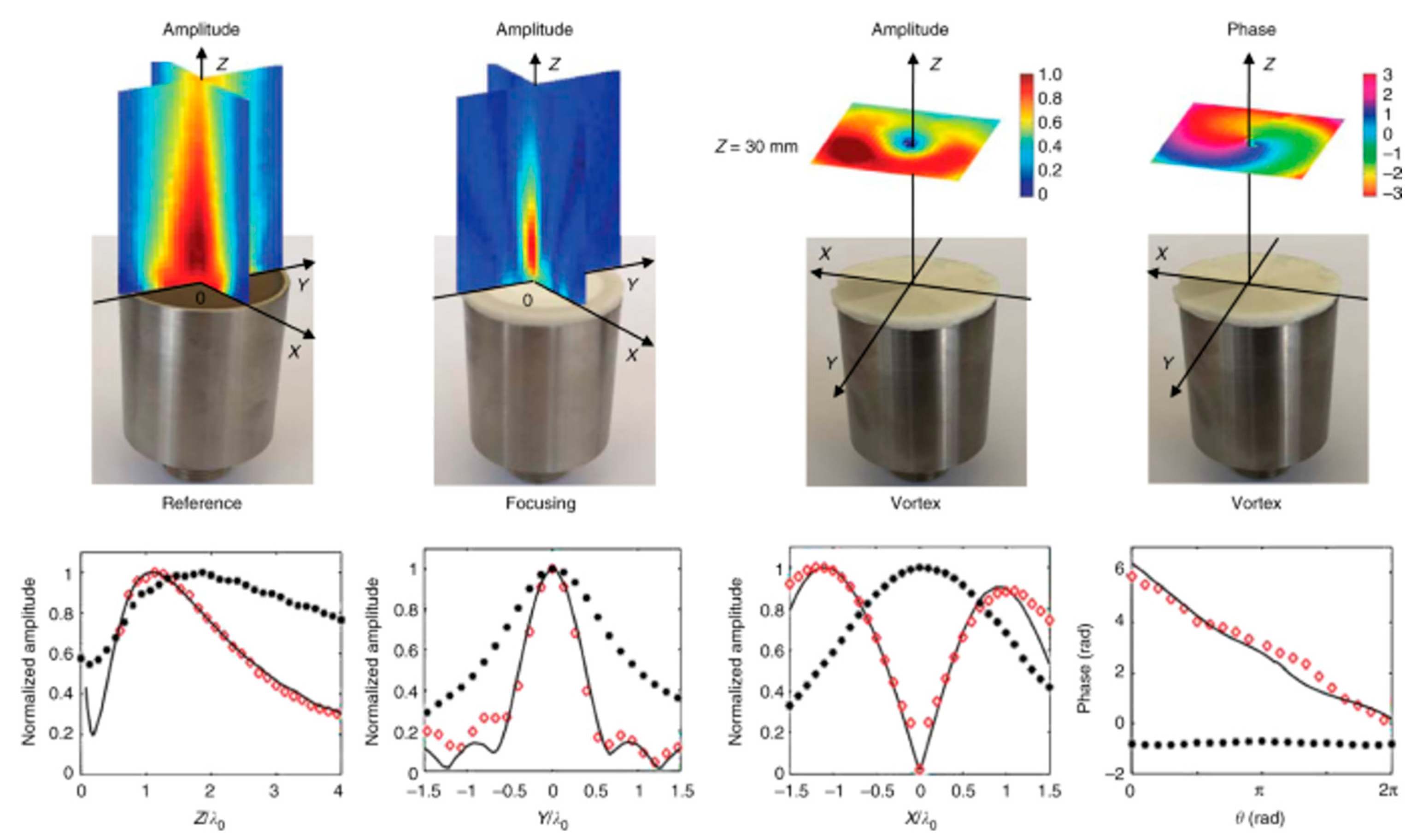
Tang et al. proposed an ultrathin acoustic metasurface (thickness ≈ 10–300 µm, up to λ/650) based on a spring–mass resonator model, composed of a flexible fiber/bead network formed by electrospinning soft polymer fibers and rigid copper beads [
39]. As shown in
Figure 4, the metasurface features a porous network structure that enables subwavelength thickness and tunable phase modulation. This design addresses the structural complexity, rigidity, and high loss of conventional acoustic metamaterials. The system demonstrates active responsiveness, as the resonance behavior can be tuned by applying an external magnetic field. It also provides post-fabrication tunability by adjusting the magnetic field strength to shift the resonant frequency. The metasurface achieves a near-π phase shift and maintains acoustic transmittance above 80%, enabling effective wavefront control. Through hollow-out patterning using a paper-cutting technique, diverse phase control functions such as acoustic vortex generation, sound focusing, and ultra-vibration manipulation are demonstrated within a single device, highlighting both its multifunctionality and large-area fabrication potential.
2.2. Phase-Modulating Metasurfaces
Phase-modulating metasurfaces control the phase delay of transmitted or reflected waves by tuning the geometry, depth, or material properties of unit cells. This enables the manipulation of acoustic wavefronts, beam steering, and focusing. Gradient Index Metasurfaces (GIMs) are a representative example, providing spatially varying phase profiles for advanced wavefront control. Such structures are used in ultrasonic imaging. Xiao et al. developed a membrane-based acoustic metamaterial that can be actively adjusted through external voltage application [
53]. Their experimental configuration was made of a rubber membrane for vibration, a central disk with gold-coated gold acting as both a mass load and an electrode, a gold-coated rigid ring for electric field generation and sound transmission, and a solid ring for fixing. Experiments show that when a DC voltage is applied, the resonance frequency can be modulated and the phase can be tuned, and it acts as a phase modulator in a phase array that can manage the sound wave at will. When the AC voltage is applied, it acts as an extra vibration source and amplifies or attenuates the vibration through phase control to achieve a noise reduction performance of up to 52 dB, experimentally demonstrating that the sound switch function can be realized.
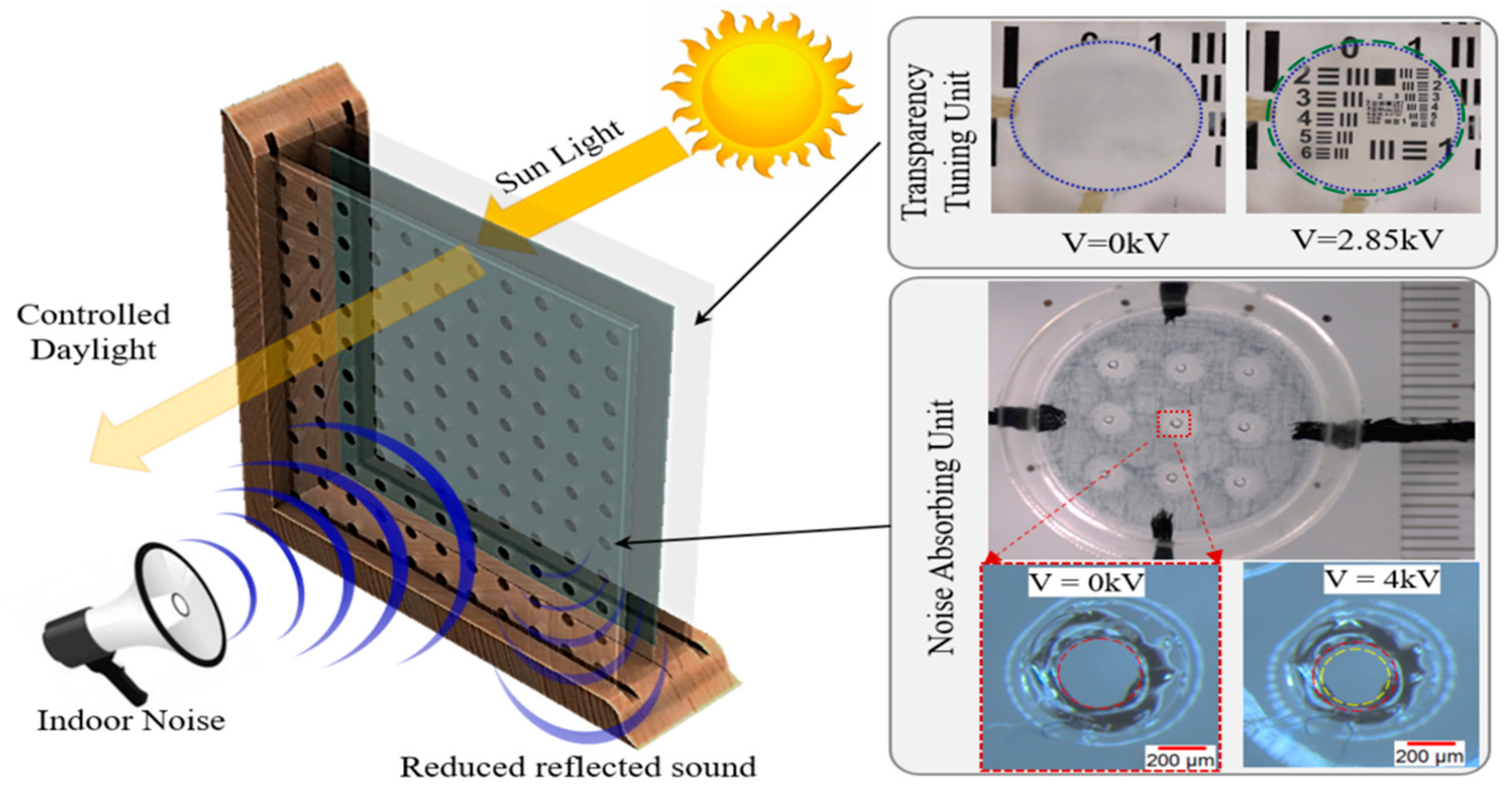
Shrestha et al. presented a multifunctional smart window based on the dielectric elastomer actuator (DEA), which can electrically tune the acoustic absorption performance [
40]. The structure consists of a microperforated dielectric elastomer actuator (MPDEA) fabricated using an acrylic-based dielectric elastic body (3M VHB 4910) with an inner diameter of 20.5 mm and an outer diameter of 28 mm, and a rigid glass backplate with a depth of 40 mm. In addition to serving as a light-scattering layer, the MPDEA incorporates a Helmholtz-like configuration that enables an acoustic control mechanism focused on phase modulation. The applied voltage alters the perforation radius and membrane tension, dynamically tuning not only the resonant frequency but also the phase response, and both single- and double-layer configurations exhibit electrical tunability. The double-layer device achieves a 15% reduction in perforation size and absorbs sound in the 846–1290 Hz range with absorption coefficients above 0.8. The system demonstrates an active electrostatic control mechanism along with a high level of post-fabrication tunability through voltage modulation.
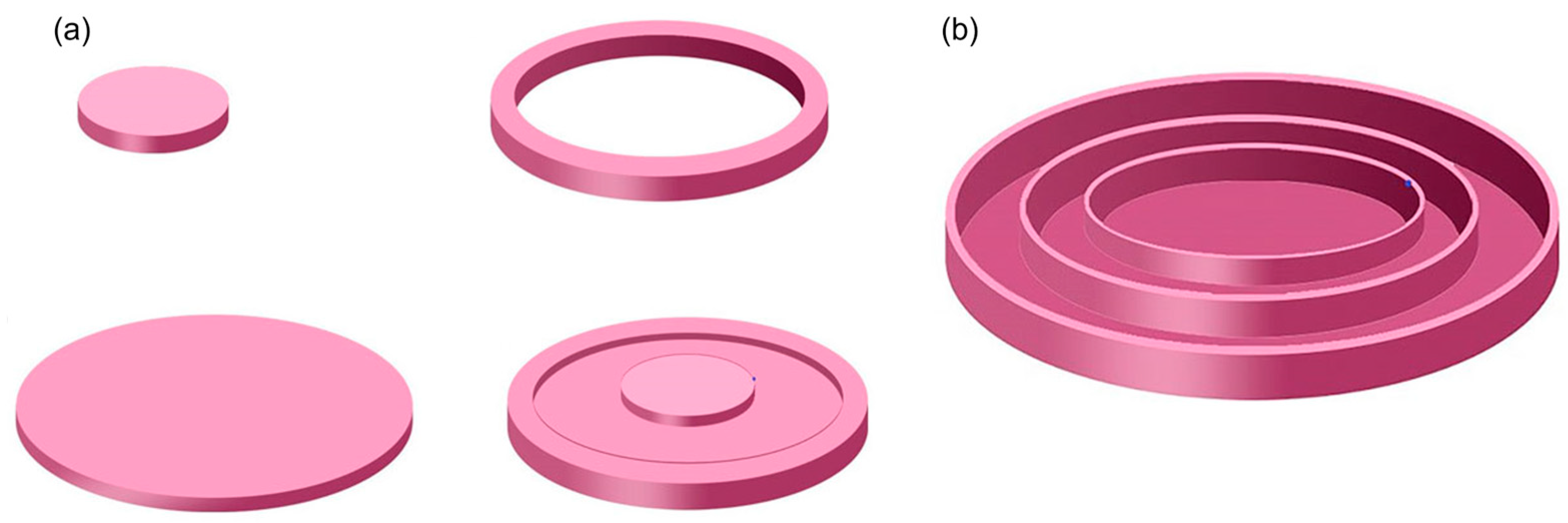
Jin et al. proposed an acoustic gradient-index (GRIN) metasurface based on soft graded-porous silicone rubber [
41]. The structure enables broadband three-dimensional wavefront shaping in underwater ultrasound environments, with spatial porosity control allowing acoustic refractive indices ranging from 1.4 to 7.5. Composed of a graded porous film supported by a rigid frame, the metasurface induces frequency-dependent phase delays by microscale reconfiguration of its internal pore structure in response to external mechanical inputs, enabling precise control over acoustic scattering even in ultrathin formats. As illustrated in
Figure 5, this structural design enables advanced functionalities such as three-dimensional acoustic focusing and vortex beam generation. This 2 mm-thick metasurface demonstrated 5° beam steering, acoustic focusing with a 50 mm focal length (NA = 0.82), and vortex beam generation with a topological charge of +1 using a single transducer. These functions were experimentally verified in free space without the need for phased arrays. The authors further highlighted the feasibility of scaling up the design using conventional polymer processing and precision patterning techniques, referencing existing acoustic lens fabrication strategies as a potential pathway [
54].
Ma et al. proposed a spatial acoustic modulator (SSM), an electrically reconfigurable phase-adjustable acoustic metasurface, to actively control the acoustic field in the echo environment [
42]. The proposed structure consists of a binary phase-adjustable membrane resonator array, with a two-dimensional metasurface morphology of 90 pixels. Each membrane has a radius of 27 mm and a thickness of 0.1 mm, with a magnetic disk with a radius of 6 mm mass 0.9 g attached to its center, and above each unit cell, an electromagnet with a diameter of 2.5 mm can be placed at intervals to fix or release the center of the membrane depending on the voltage application. As shown in
Figure 6, the unit cell is designed to enable binary phase switching via electromagnetic control, and its vibration modes vary depending on the applied voltage state. Through experiments, it was confirmed that it is possible to form a hotspot that concentrates sound pressure as opposed to a quiet zone that reduces sound pressure by up to 21 dB at a specific location. This control is achieved through a feedback-based optimization algorithm, and SSM shows that complex echo sound fields can also be actively reconstructed.
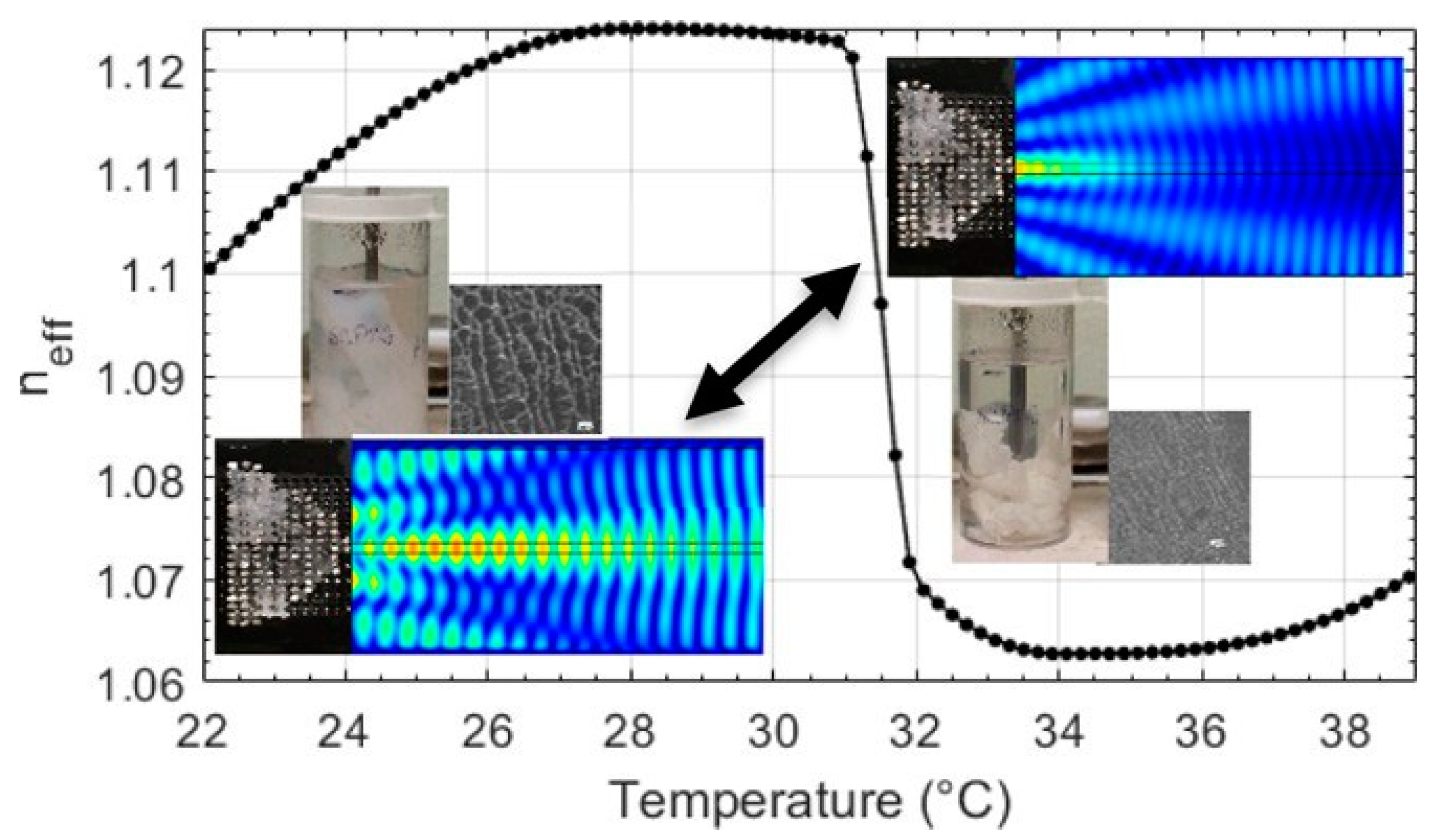
Walker et al. developed a tunable hybrid ultrasonic lens by infiltrating a solid phononic crystal (PnC) lens with a thermo-responsive hydrogel composed of PVA and PNIPAm [
43]. The hydrogel exhibits a discontinuous phase transition near 32 °C, which causes a sharp increase in the speed of sound and refractive index. This thermal actuation enables the hybrid lens to dynamically shift its focal length from 40 mm to 50 mm. The focal shift mechanism enabled by the hydrogel’s phase transition is schematically represented in
Figure 7. The design leverages the contrast between the PnC structure and the thermosensitive polymer to modulate dispersion and transmission, allowing for temperature-driven focusing without electrical components.
2.3. Amplitude-Modulating Metasurfaces
Amplitude-modulating metasurfaces are designed to attenuate the sound pressure level by inducing energy dissipation or scattering. This class includes porous layers, micro-slit arrays, and viscous-damping-based units and is commonly used for indoor acoustic management and echo reduction. Although typically simpler than phase-modulating types, they may offer lower frequency selectivity [
47].
Figure 8 presents an example of a hybrid design that incorporates amplitude modulation as part of a more complex Phase–Amplitude–Phase (PAP) structure.
Sun et al. proposed a low-frequency absorption method for the soft wall space coil parameter (SSM) using a soft wall [
44]. The method is absorbed through friction-like splitting along the inner space coil channel and features informative splitting of the soft wall. And the half-power bandwidth is 1.6 times wider than when using the rigid wall space coil parameter (RSM) of the same geometric dimension. The method consists of a soft wall made from Dragon Skin™ 10 NV and a frame made from the PLA used to support it. The total thickness of the SSM sample used in the experiment is less than 1/25 wavelength, and all structural dimensions, including the fine channel and soft wall thickness, are designed to be very thin relative to the wavelength.
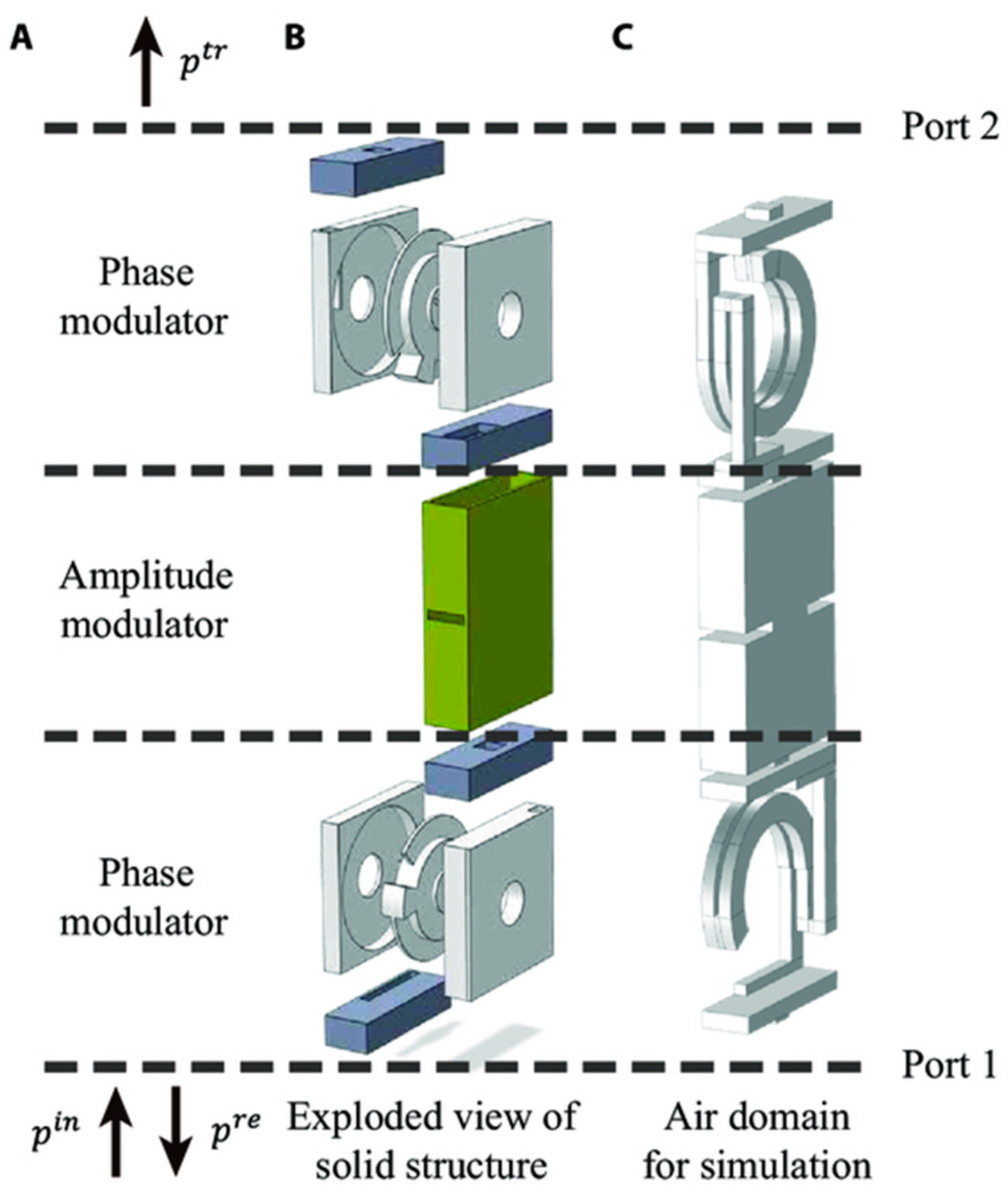
Tian et al. proposed a unit cell of an acoustic metasurface capable of phase-amplitude-phase (PAP) control, and through this, an arbitrary acoustic impedance matrix was implemented [
45]. This structure allows wave control of a higher degree of freedom than the existing phase control central metasurface, and can precisely control both amplitude and phase. The unit cell transverse size (width) of the metasurface is designed to be 1.12 cm (λ/9), and the unit cell thickness is 3.5 cm (main body 3.3 cm + cover 0.2 cm) and the interior includes two phase modulators and a central amplitude modulator. Through numerical simulations and acoustic experiments, the proposed metasurface has been demonstrated to be effective in the design.
2.4. Sound Insulation Metasurfaces
Sound insulation metasurfaces are innovative acoustic control structures that employ resonators, interference architectures, and multi-resonance mechanisms to achieve excellent low-frequency transmission loss even in ultra-thin, lightweight designs. These metasurfaces induce strong resonances at targeted frequencies to absorb or scatter sound energy for high attenuation, and form bandgaps through phase and amplitude interference between adjacent units to enable broadband sound insulation. The future integration of multi-material 4D printing and intelligent design libraries is expected to accelerate the commercialization of ultra-thin, lightweight metasurface barriers tailored for low-frequency noise sources [
55,
56].
Xia et al. proposed a multi-film composite metasurface with enhanced sound insulation performance and magnetically adjustable acoustic properties [
46]. This metasurface consists of a circular magnetron film of 1 mm thickness and 15 mm radius, an aluminum frame of 3 mm thickness, and a lead mass block of 6 mm radius and 2 mm thickness. For the composite structure, three films are separated by an aluminum spacer and laminated.
Figure 9 illustrates the key components of the composite metasurface, including the laminated multi-film structure and the individual material layers. The experiment showed that the Young’s modulus and adjustable frequency range of the magneton film are changed by the presence of a magnetic field. Utilizing the composite film, the structure exceeded the bounds of previous single-film methods, generating several resonant frequencies and achieving sound insulation in an extended frequency range.
2.5. Multifunctional Metasurfaces
Multifunctional metasurfaces are engineered to integrate acoustic functions with other physical domains such as optics, mechanics, or thermal response. Examples include devices that combine transparency control and sound absorption or integrate pressure sensing with acoustic modulation. Such systems offer high versatility for smart windows, wearable devices, and multifunctional sensors [
40].
Figure 10 presents a representative multifunctional system that integrates a dielectric elastomer actuator for simultaneous light and sound regulation.
3. Bulk-Type Acoustic Metamaterials
Three-dimensional (3D) acoustic metamaterials (AMs) have bulk structures and are characterized by controlling acoustic characteristics within the entire space. Due to these characteristics, it can be used in a wide range of applications and has a high degree of freedom in design. However, sophisticated manufacturing processes are essential along with complex designs, and technical difficulties exist, especially in implementing large-area bulk structures based on soft materials. For example, 3D printing, which is mainly used, is utilized in various complex structure fabrication processes, but mass production is difficult due to high cost and slow processing speed [
57]. Also, the method of molding a large-area structure by molding/injection molding can be mass-produced with high repeatability and product consistency, but there are limitations in implementing complex microstructures, and materials have limitations due to durability issues in practical applications [
58]. In addition, in metal-insulator-metal (MIM)-based metamaterials, continuous large-area patterning at tens of centimeters through roll-to-roll nanoimprint (R2R NIL) has been successfully performed, but its application to soft acoustic metamaterials is still in its infancy [
59]. In addition, for example, reconfigurable structures based on Origami or Kirigami require manual assembly, which limits consistent quality and automated production [
60]. Accordingly, it is pointed out that the practical use of soft-based three-dimensional (3D) acoustic metamaterials (AMs) requires the introduction of high-throughput methods such as roll-to-roll processes, modular automatic assembly systems, and 4D printing to overcome the existing throughput limitations [
61].
Meanwhile, three-dimensional (3D) acoustic metamaterials (AMs) can be classified into composite/hybrid structures [
62,
63], modular structures [
64,
65,
66,
67], and reconfigurable structures [
68,
69] depending on the structural design.
The composite/hybrid structure is a structure in which soft material with high flexibility and reactivity and rigid material with excellent mechanical stability are combined to complement each other by utilizing each other’s advantages [
39,
70]. Details of these structures include the mechanism of soft-rigid layered structure, adhesive multiphase structure [
71], and topologically designed structure [
72,
73,
74].
Among the classifications, reconfigurable structures are systems that reversibly alter their shape in response to external stimuli, enabling real-time modulation of various acoustic responses within a single configuration [
19]. This type of structural reconfiguration is implemented through diverse mechanical deformation mechanisms. Notable approaches involve folding structures based on origami and Kirigami [
75,
76,
77,
78,
79,
80], actuator integration on flexible substrates, and compliant deformation using dielectric elastomers (DEs) [
81,
82]. These approaches offer broader tunability than conventional AMs, particularly in frequency response, damping performance, and directional control. Reconfigurable AMs are capable of performing multiple functions within a single structure. This adaptability enables applications such as acoustic cloaking [
83,
84], tunable waveguides [
85], and multifunctional sensor systems [
86,
87,
88] by allowing real-time responses to environmental changes. To complement the structural and functional classifications,
Table 4 highlights selected bulk-type AMs and their acoustic performance metrics, including absorption levels and frequency ranges.
Different soft materials, including elastomers with high elasticity and resilience, liquid crystal polymers (LCPs), shape memory polymers (SMPs) [
89,
90,
91], and magnetic polymer composites (MPCs), are used to implement these systems. Each material responds to external stimuli such as electric fields, magnetic fields, thermal input [
92], or pneumatic pressure. By designing the interaction between structure and function, these systems move beyond simple material property tuning and can be extended to state-switchable acoustic devices.
Table 4.
Classification of Bulk-type Acoustic Metamaterials by absorption coefficient, thickness, transmission loss, and peak absorption.
Table 4.
Classification of Bulk-type Acoustic Metamaterials by absorption coefficient, thickness, transmission loss, and peak absorption.
| Ref | Year | Responsiveness
Type | Tunability | Absorption Coefficient
(α) | Thickness
(mm) | Transmission Loss
(dB) | Peak Absorption (Hz) |
|---|
Sim et al.
[93] | 2023 | active | Yes | - | top layer: 2
bottom layer: 2, 4, 6 | offset bilayer transmission drops
folded mode: 0,
deployed mode: 447 | - |
Bi et al.
[94] | 2023 | passive | No | Single HR 0.9966 (rectangle),
0.9565 (common trapeziform),
0.9598 (reverse trapeziform),
0.9942 (dumbbell), 0.9267 (olive)
Multiple HR array: 0.7821 (at 500–820 Hz) | 30
(Overall Structural Thickness) | - | 408 (rectangle), 349 (common trapeziform), 355 (reverse trapeziform), 364 (dumbbell), 327 (olive) |
Xu et al.
[95] | 2025 | Passive | Yes | >0.95
(At the two absorption peaks of 315 Hz and 509 Hz) | 1/28.4 th wavelength of the minimum resonator frequency. | Performance evaluation based on 10 or more
(90% or more attenuation), reaching up to 27 or more | 315, 509 |
Wen et al.
[96] | 2023 | Passive | Yes | > 0.9 | 1/18–1/6 λ | - | - |
3.1. Resonance-Based Metamaterials
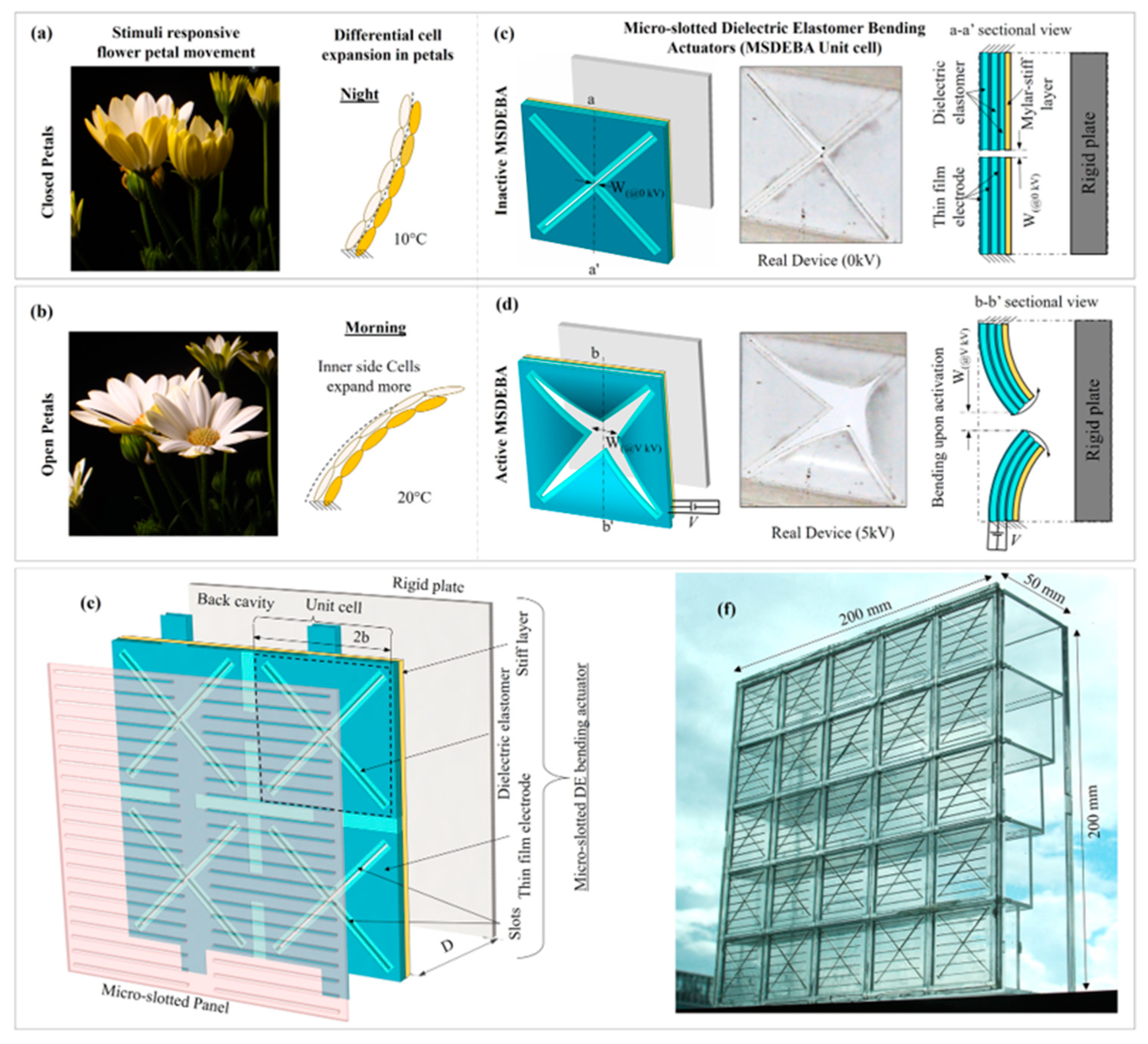
Shrestha et al. proposed a dielectric elastomer actuator (DEA)-based bending structure inspired by the flowering motion of petals, with the aim of developing a reconstructive acoustic absorber that can actively respond to changing noise environments in real time [
97]. The absorber features a multilayer micro-slotted dielectric elastomer bending actuator (MSDEBA), composed of acrylic-based VHB elastomer and a non-stretchable PET film forming a unimorph configuration. Upon high-voltage activation, each triangular petal-like segment undergoes out-of-plane bending, actively increasing the open ratio of a micro-slotted front panel (MSP) and thereby shifting the acoustic resonance frequency. This biomimetic bending mechanism and its integration with the micro-slotted panel are illustrated in
Figure 11. This geometry-driven change in the open area alters the acoustic coupling between the slotted panel and the underlying cavity, enabling frequency-selective sound absorption. Electrical actuation (5 kV) enables a peak open ratio of 14.07%, shifting the transmission loss peak from 697 Hz to 1204 Hz (a 72.7% shift), and doubling the 15 dB absorption bandwidth from 435 Hz to 820 Hz. This absorber has the potential to adjust the absorption spectrum in line with real-time noise frequency variations.
Wang et al. proposed a flexible acoustic metamaterial using Ion Polymer-Metal Composite (IPMC), a representative Ionic EAP material, to implement electrically adjustable low-frequency acoustic absorption properties [
98]. This new structure provides sound absorption characteristics that can be continuously tunable under low voltage. In addition, the combination of IPMC material detection and operation functions allows effective low-frequency sound absorption as well as a wide range of modulation with minimal voltage. Moreover, by attaching an additional MPP, complete sound absorption can be reached at specific frequencies. The IPMC used in the experiment was a Pd-Au electroded IPMC with Nafion-117 and ridge support produced through 3D printing using PLA to provide back-cavity and support structure. These absorbers facilitate real-time low-frequency noise control or the practical use of soft, intelligent material-based acoustic metamaterials.
Sim et al. proposed a magneto-mechanical bilayer metamaterial for acoustic wave control through area conservation density adjustment [
93]. This structure consists of two layers of magnetic soft material, each of which is designed to have a different magnetization distribution. At this time, the soft material provides high flexibility and reactivity so that the shape can be reconstructed in response to the magnetic field. These double-layer metamaterials can be reconstructed in various forms through the composition of the unit cell while minimizing area change.
Figure 12 illustrates both the single-layer and bilayer magneto-mechanical structures used to achieve shape reconfigurability under magnetic actuation. As a result of the experiment, it was confirmed that when the thickness of the lower layer was 2 mm, two acoustic band gaps were formed, 889–1118 Hz and 1580–1958 Hz. In addition, it was verified to maintain the band gap in the sections of 915–1138 Hz and 1654–1785 Hz, even when the lower layer was 4 mm. These area-conserving magnetic field-regulated metamaterials can be used in adaptive acoustic bandgap control or variable vibration isolation.
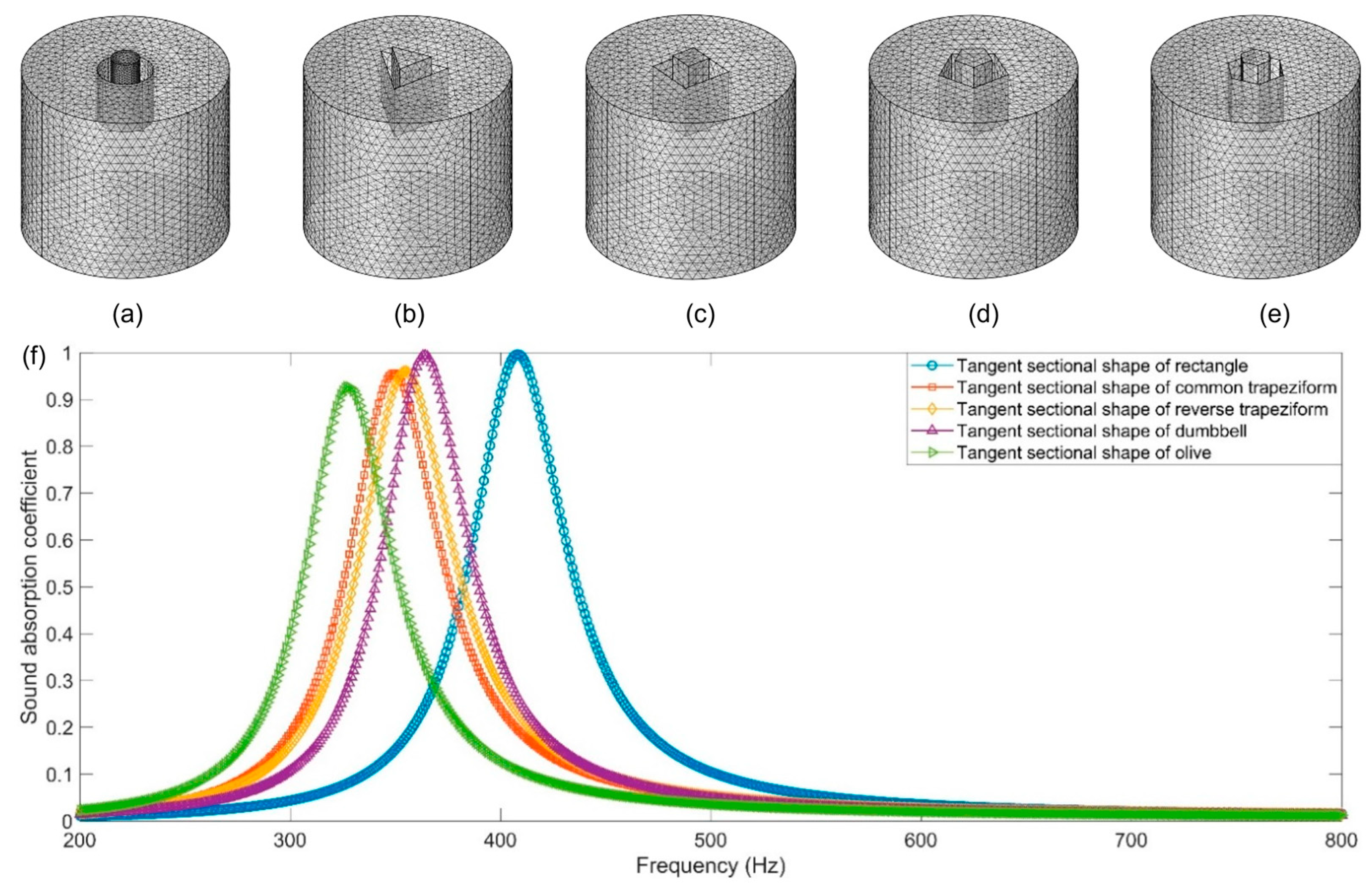
Bi et al. proposed an acoustic metamaterial that improved low-frequency sound absorption performance by using a parallel-connected Helmholtz resonator with a built-in opening to improve low-frequency sound absorption performance through structural shape control [
94]. The tangential cut surfaces of various openings of rectangles, dumbbells, and olives, as well as the effects on the cross-sectional resonant frequency, such as circles and equilateral triangles, were analyzed by 2D/3D acoustic finite element analysis.
Figure 13 displays the different tangent sectional shapes investigated and their impact on sound absorption performance. In particular, the combination of the olive tangential cut surface and the circular cross-section induced the lowest resonant frequency at 327 Hz, showing excellent low-frequency sound absorption performance. As a result of manufacturing and measuring an optimized multi-parallel structure specimen based on this, an average sound absorption coefficient of 0.7821 was achieved in the 500–820 Hz section, even with a thin thickness of 30 mm. This study provides practical design guidelines for the design of small, low-frequency sound absorption devices through precise control of structural shapes. This study provides practical design guidelines for the design of small, low-frequency sound absorption devices through precise control of structural shapes.
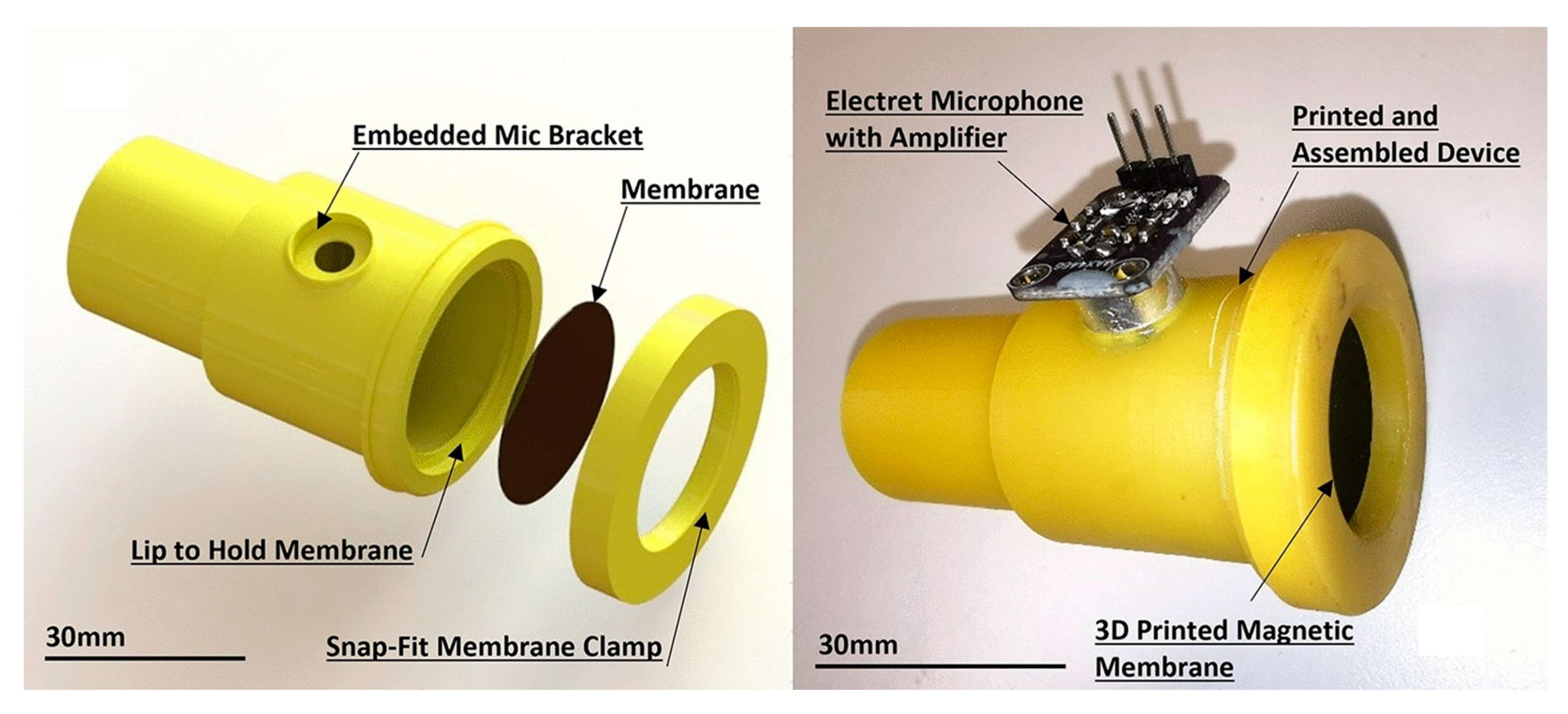
Gardiner et al. proposed a magnetic membrane-based adjustable acoustic metamaterial cell manufactured using SLA 3D printing for the purpose of controlling real-time resonant frequency by magnetic fields [
99]. This structure is based on a Helmholtz resonator and consists of a magnetic membrane using a superparamagnetic resin. The design of this tunable unit, including its 3D-printed Helmholtz structure and magnetic membrane, is illustrated in
Figure 14. As a result of the experiment, this metamaterial recorded a resonance frequency of 88.73 Hz when the magnetic field was 0 mT, and when a magnetic field of 392.5 mT was applied, the resonance frequency was adjusted to 86.63 Hz. This indicates that the frequency change range is 2.1 Hz (88.73 Hz to 86.63 Hz), and this frequency adjustment occurs when the membrane tension changes according to the change in the magnetic field. In addition, the prediction result through the mathematical model confirmed that the resonance frequency was 88.18 Hz in the absence of a magnetic field, showing a small difference of 0.55 Hz from the experimental result. This work shows that resonant properties can be tuned in the low-frequency region, and it can be applied to the development of next-generation adaptive devices for low-frequency modulation.
3.2. Composite and Hybrid Metamaterials
Deng et al. proposed an acoustic metamaterial based on a soft-stiff hybrid polymer film composed of a tough PNIPAM hydrogel and rigid SU-8 patterns [
100]. When heated above the hydrogel’s lower critical solution temperature of 29.3 °C, the film shrinks to 45% of its original volume at 100 °C, inducing mechanical buckling guided by the SU-8 segments. Through this buckling, the material can form 3D wave-shaped peak-valley structures, checkerboard patterns, and Gaussian surfaces.
Figure 15 illustrates the fabrication process and the resulting self-morphed 3D structures formed from the PNIPAM/SU-8 hybrid film. Due to the large mechanical mismatch between the PNIPAM hydrogel (~40 kPa) and SU-8 (4 GPa), deformation is confined to the active domains, resulting in sharp-edged, repeatable geometries. Finite element analysis showed that the stiff SU-8 increases the energy barrier between buckling modes, promoting stable and deterministic shape transformation while suppressing undesired interactions between adjacent units. The acoustic performance of the resulting 3D structures was investigated through simulations and experiments. Using a coupled piezoelectric-circuit-structural-acoustic module in COMSOL Multiphysics, where all materials (PNIPAM hydrogel, SU-8, and PAAM) were modeled as linearly elastic and isotropic, the frequency-dependent transmission was simulated under thermal expansion and free boundary conditions. The model predicted two phononic band gaps at 4–6 kHz and 7–9 kHz. These were experimentally validated by measuring the acoustic frequency response of a thermally morphed structure with wedge-like bulges, confirming strong attenuation in the same frequency ranges. The shape change was analyzed through static and linear buckling simulations to capture the equilibrium-state morphology. It was suggested that the method of self-transforming these hybridized separator films to form a 3d structure will lead to progress in the production of smart and multifunctional materials for a wide range of applications, such as metamaterials, soft robotics, and 3D electronic engineering.
3.3. Modular Metamaterials
The modular soft structure has the advantage of being able to adjust the acoustic properties by combining individual modules and being expandable, easy to maintain, and optimized for conditions. Kun Zhang et al. proposed a modularized pneumatic soft acoustic metamaterial [
101]. Through casting molding, they designed air-pressure-based soft scatterers in various types, such as squares, hexagons, and circles. And they performed experiments to compare their performance. The sound absorption mechanism works by adjusting the air pressure to deform the scatterers and adjust the bandgap, accordingly, blocking sound within specific frequency ranges. Their study proved that increasing the air pressure enlarges the bandgap, enhancing the sound attenuation effect, with an average transmission reduction of approximately 20.2 dB over a maximum bandgap spanning 3209.7–4639.7 Hz. Xiaohua Liu et al. designed a pneumatic soft phononic crystal to realize a tunable bandgap [
102]. Their research uses the principle that in the absence of air pressure, the soft phononic crystal does not show a bandgap. However, when air pressure is applied, the scatterers of the soft phononic crystal are deformed, inducing a reversible bandgap. The bandgap width can be adjusted by varying the applied air pressure within a range of 0 to 120 kPa. Furthermore, they studied how the scatterers’ geometric parameters—such as diameter, height, and thickness affect the evolution of the phononic crystal’s bandgap. This demonstrates the applicability of the combination of pneumatic soft robots and tunable acoustic devices.
In the case of a 3D printing-based reconfigurable structure among modular soft structures, it has the advantage of being able to manufacture complex and diverse-shaped modules quickly and at low cost, and can be customized and applied to applications. Li et al. proposed a novel technique for controlling the alignment of rigid scatterer columns consisting of acrylonitrile-butadiene-styrene (ABS) by introducing mechanical deformation on flexible and stretchable soft substrates with the aim of actively regulating acoustic waves in a particular frequency band [
103]. This deformation process leads to localized resonance effects, which in turn modify the propagation of sound waves through the material. The soft substrate used in the study was fabricated from hyperelastic Ecoflex, chosen for its ability to withstand mechanical strain without compromising its structural integrity. By applying tensile strain ε to the substrate, they observed variations in the width of the bandgap. Especially, the study identified a bandgap frequency of 3.021 kHz at a maximum tensile strain of ε = 0.3, demonstrating the potential of this method to manipulate sound transmission properties in a controlled manner. They mentioned the potential for a precise manipulation of sound switching, as well as reducing noise and improving the acoustic quality of the environment.
3.4. Origami-And Kirigami-Based Metamaterials
Xiaoming Cai et al. utilized the Kresling origami configuration to create a Helmholtz resonator (HR) composed of polypropylene sheets to actively adjust the sound absorption properties to different noise environments, proposing the first tristable origami-inspired acoustic metamaterial (OIAM) [
60]. This structure can implement zero-stiffness, bistable, and tristable states by adjusting the folding angle parameters, thereby achieving variable sound absorption characteristics with an absorption rate α > 0.95 at three frequency ranges (149 Hz, 180 Hz, 275 Hz) by adjusting the structural height. OIAM overcomes the limitations of fixed-frequency absorbers through active structural reconfiguration based on multistable architecture, achieving both broadband low-frequency absorption and load-bearing capability simultaneously. This design has potential applications in industrial and transportation systems.
Jiajie Luo et al. proposed bistable reconfigurable acoustic metamaterials (BRAM) that change shape in response to thermal stimuli, based on combining a Helmholtz resonator and a bistable structure [
104]. This structure was fabricated using shape memory polylactic acid (SM-PLA) via 4D printing technology, and it can switch between two stable states at 55 °C. BRAM exhibits absorption peaks of 130 Hz and 228 Hz in State I, and 156 Hz and 542 Hz in State II, demonstrating multi-band low-frequency absorption. Additionally, it is possible to adjust the absorption band through geometrical parameter tuning via angle modulation, and the shape recovery process shows a linear restoration rate, indicating high controllability. Combined with the idea of this study, they proposed that a manual design based on natural biological structures and an active design method based on the principle of absorption should be adopted to realize lightweight, multifunctional, and intelligent low-frequency noise absorption metamaterials as a gradual revolution to cope with the current limitations of sound absorption metamaterials.
Babaee et al. developed a reconfigurable acoustic waveguide based on origami-inspired structures [
105]. The three-dimensional system, composed of rigid PET plates and flexible hinges, allows for the dynamic reconfiguration of internal acoustic paths through external mechanical deformation, enabling active control over the directionality and propagation of sound. The metamaterial consists of an array of extruded cubes, where “extruded” refers to tube-like volumes protruding outward from each face of the cube. As shown in
Figure 16, the structure can be transformed into three principal configurations: 1D, 2D, and 3D. Each configuration exhibits distinct acoustic transmission characteristics, which were analyzed through both simulations and experiments. The concept was further extended to structures based on truncated octahedra and hexagonal prisms, demonstrating that the connected tube network can be reversibly formed or disrupted to control the propagation of acoustic energy. To analyze sound propagation, the internal and external air domains were meshed using 10-node quadratic acoustic elements (AC3D10M) in Abaqus 6.12. The structure was modeled as a 4 × 4 × 4 array of extruded cubes, with the plates treated as rigid reflective boundaries. Nonreflecting boundary conditions were applied to the outer domain. Harmonic pressure was applied at one opening to excite acoustic waves, and steady-state linear responses were computed over a wide frequency range. In the simple single-tube configuration, simulation results showed good quantitative agreement with experimental measurements. For the interconnected configurations, the overall trends matched qualitatively, but geometric imperfections such as gaps between plates caused deviations in the quantitative results.
Xu et al. proposed a compressible hybrid acoustic metamaterial integrating an origami-inspired V-shaped resonator and a spiral extended-neck Helmholtz resonator, with the aim of maintaining constant sound absorption performance in the low-frequency region despite structural deformation due to external loads [
95]. The structure achieves near-perfect absorption at 315 Hz regardless of deformation, with a second peak tunable from 509 Hz to 682 Hz under up to 31.3% compression strain. It also maintains stable performance between 316 and 391 Hz under deformation and supports oblique incidence up to 60°. This design combines structural foldability and compressibility to enable tunable, reconfigurable acoustic behavior for multifunctional SAM applications.
Wen et al. proposed an accordion origami-based acoustic metamaterial (OBAM) using a Helmholtz resonator as a side cavity for the purpose of blocking noise over a wide frequency range [
96]. This structure combines flexible mesh fiber tape and hard materials such as PLA to implement a 2D pattern as a 3D structure through preset mountain and valley folding, and geometric parameters such as folding angle can be finely adjusted. This allows a precise tuning of the volume of the side cavity by air pressure, which adjusts the acoustic impedance in real time and achieves a transmission loss of 10 dB or more (negative energy attenuation above 90%) within the range of 271–790 Hz. In addition, high consistency between experimental, theoretical, and numerical analysis results confirmed that the transmission loss peak is improved from about 13 dB to 18 dB according to the compression rate change, and an effective operating bandwidth of up to 500 Hz is implemented.
4. Summary and Conclusions
The review findings highlight that soft acoustic metamaterials broaden the design space of acoustic control by merging wave physics with the adaptability of soft materials. Across the spectrum of implementations, there is a clear distinction yet complementarity between metasurface-type and bulk-type SAMs. Planar metasurfaces excel at precise wavefront engineering on surfaces, such as generating targeted phase delays to focus or steer sound. In contrast, bulk three-dimensional metamaterials allow volumetric interaction with sound, enabling phenomena like omnidirectional attenuation and multi-band acoustic filtering within a single material. These bulk three-dimensional metamaterials can be applied to advanced features such as vibration blocking and concealment, and small, low-frequency sound absorption devices. They are also used in smart and multifunctional materials such as soft robotics, 3D electronics, and noise mitigation in architectural, industrial, and transportation systems.
A key advancement in this field is the integration of soft, deformable materials into acoustic metamaterial design, which has enabled levels of tunability and reconfigurability that were not possible with conventional rigid structures. Many recent SAM systems have evolved toward active or adaptive operation by incorporating elements that respond to external stimuli and allow on-demand adjustment of acoustic properties. Notable implementations include systems that use magnetic fields to modify the stiffness of resonators, structures that deform in response to electric fields, and architectures that can be tuned by pneumatic pressure.
The range of materials used in SAMs has expanded beyond hard plastics and metals to include soft matter such as silicones, hydrogels, shape-memory polymers, and other stimuli-responsive substances. This material diversity has allowed the development of metamaterials capable of altering their acoustic state in response to magnetic, electric, thermal, or mechanical triggers, thereby achieving adaptive functionalities such as switchable absorption or tunable bandgaps with real-time responsiveness.
Despite these advances, several challenges remain in transitioning SAMs from laboratory-scale demonstrations to widespread practical applications. Fabricating large-scale, structurally robust soft metamaterials with consistent acoustic performance remains a complex task, as subwavelength structuring of soft materials often involves intricate processes and tight control over material uniformity across extended areas or volumes.
Furthermore, the smooth integration of sensors, actuators, and control logic is required to realize real-time reconfigurability, which raises additional challenges related to power supply, feedback stability, and system complexity. Active SAMs have different required voltages and power densities depending on how they are driven, resulting in inherent trade-offs such as response speed, energy efficiency, and system integration in the process of commercialization. For example, dielectric actuator (DEA) based systems require a high voltage of about 5 kV, which leads to reduced power conversion efficiency, complexity in high voltage circuit design, difficulties in wiring and insulation when implementing large-area arrays [
45]. On the other hand, graphene or ITO-based electrical drive metamaterials are capable of low-power operation but have limited functional implementation due to their limited strain or modulation range [
37]. These low-voltage and low-power drives are advantageous for integration and energy efficiency but have limited modulation width and response speed. In contrast, high voltage and high power drives provide a wide range of control and fast response, but there are barriers in heat generation, reliability, and large-area scalability.
The inherent trade-off between softness and durability also presents limitations, as highly deformable materials may experience fatigue, hysteresis, or slower dynamic responses. For example, repeated folding or stretching in pneumatic or origami-based systems can degrade long-term performance, and certain active mechanisms demand high energy inputs that are not always feasible in real-world settings.
Future progress will likely rely on innovations across multiple disciplines. Developments in materials science—such as the creation of fast-responding elastomers with improved fatigue resistance—alongside advanced fabrication techniques like 3D or 4D printing, and integration strategies from soft robotics and flexible electronics, are expected to be critical. Enhanced computational tools will also aid in the predictive design and optimization of complex acoustic structures. At the same time, it is essential to acknowledge the underlying trade-offs between traditional and soft acoustic metamaterials. Although structural compliance affords exceptional tunability and adaptability, it invariably entails heightened fabrication complexity, diminished mechanical integrity, and reduced energy efficiency—challenges whose resolution will be instrumental in realizing versatile, high-performance acoustic systems.
To translate these multidisciplinary advances into practical devices, researchers are actively working on modeling and tuning methods. Recent studies have begun to reflect such interdisciplinary advances, particularly in how SAMs are designed, modeled, and tuned for functional performance. For example, Chen et al. introduced a magnetically tunable membrane-type metasurface, employing geometric nonlinearity to achieve broadband control over reflection-based acoustic wave manipulation [
37]. Deng et al. proposed a thermally reconfigurable soft–stiff hybrid metamaterial and conducted finite element analysis using a coupled piezoelectric–circuit–structural–acoustic model, with all materials modeled as linear and isotropic [
99]. Babaee et al. developed a reconfigurable acoustic waveguide based on origami-inspired rigid structures and analyzed directional sound propagation through simplified acoustic simulations, assuming rigid boundaries and linear wave behavior [
104]. While each study incorporated specific elements such as boundary-applied magnetic forces or geometric nonlinearity, most adopted linear elastic material models and frequency-domain analyses. Despite differences in actuation mechanisms and structural designs, all three approaches shared common modeling simplifications, including static deformation assumptions, linear elasticity, and limited multiphysics coupling.
In particular, material and structural softness in SAMs leads to modeling challenges that involve both geometric nonlinearity and stimulus responsiveness. To address this complexity, the reviewed studies adopted simplified strategies, such as analyzing static deformation states or omitting time-dependent responses. Nevertheless, they sought to capture the essential system behavior by incorporating structure–acoustic interactions. For future work, enhanced modeling frameworks that integrate nonlinear, time-dependent behavior and full structure–acoustic coupling will be crucial for more accurate and predictive simulations of soft and reconfigurable metamaterials.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}