


Route Optimization for UGVs: A Systematic Analysis of Applications, Algorithms and Challenges

 ,
,  , and
, and
Abstract
1. Introduction
2. Research Methodology
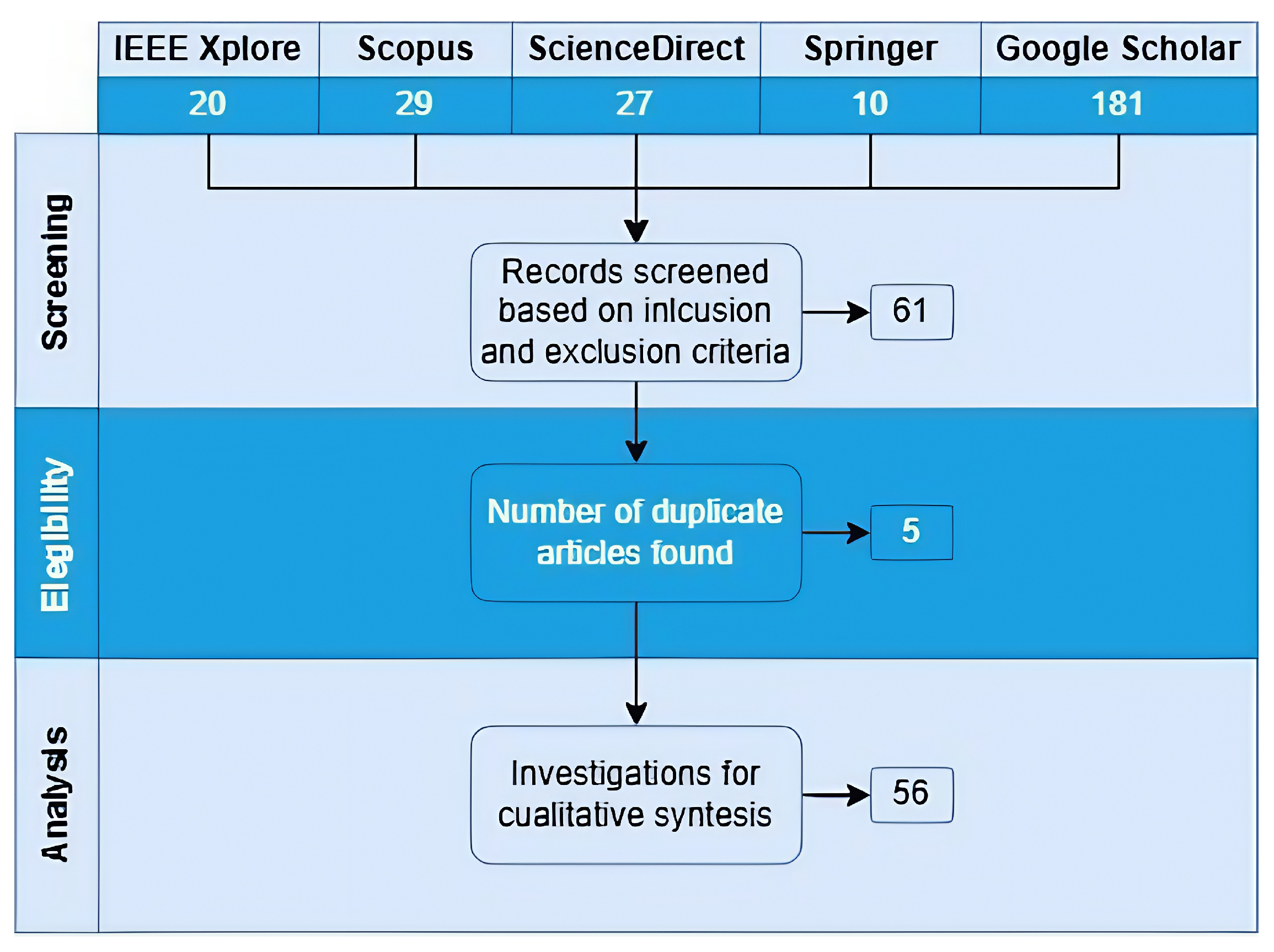
2.1. Review Protocol
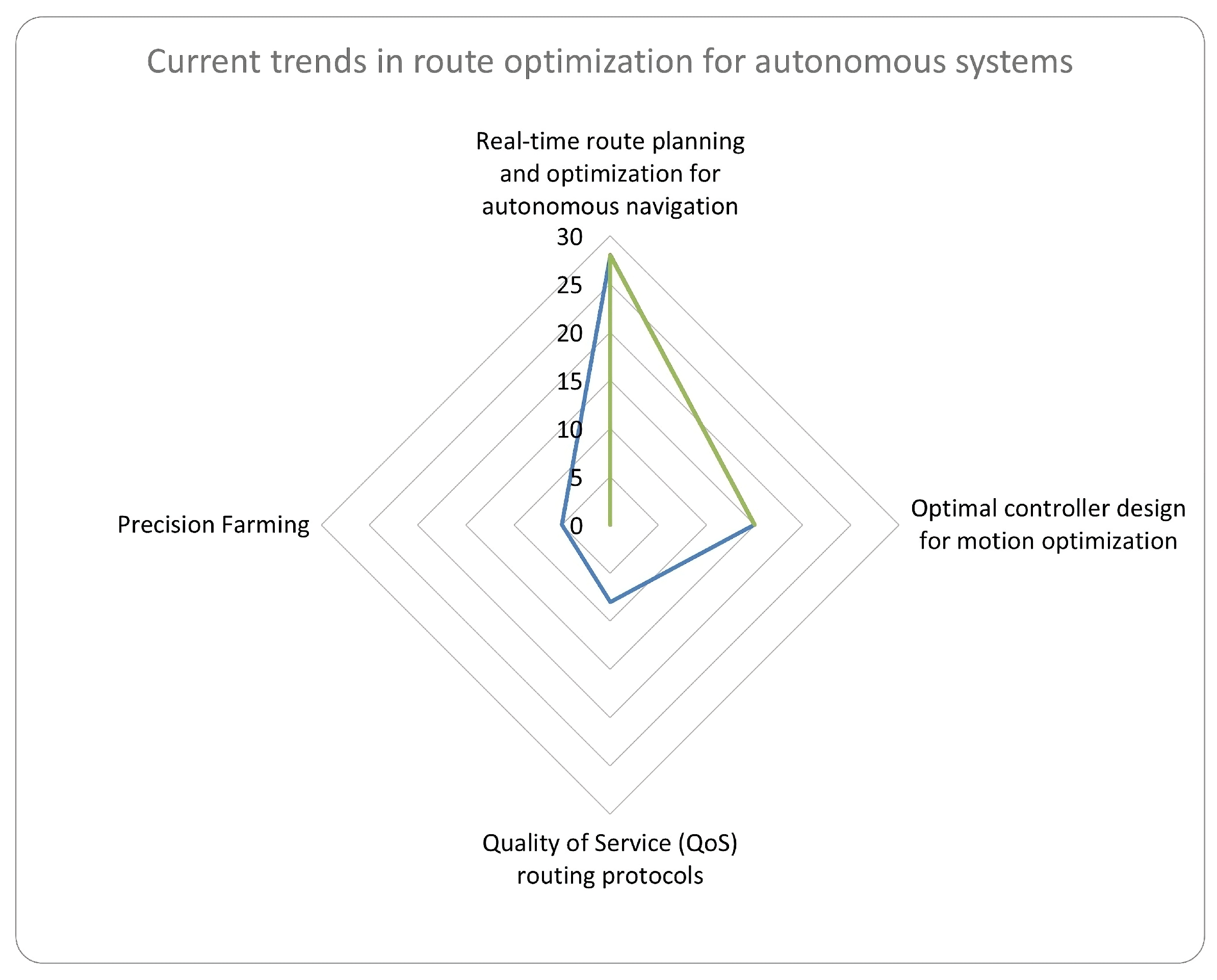
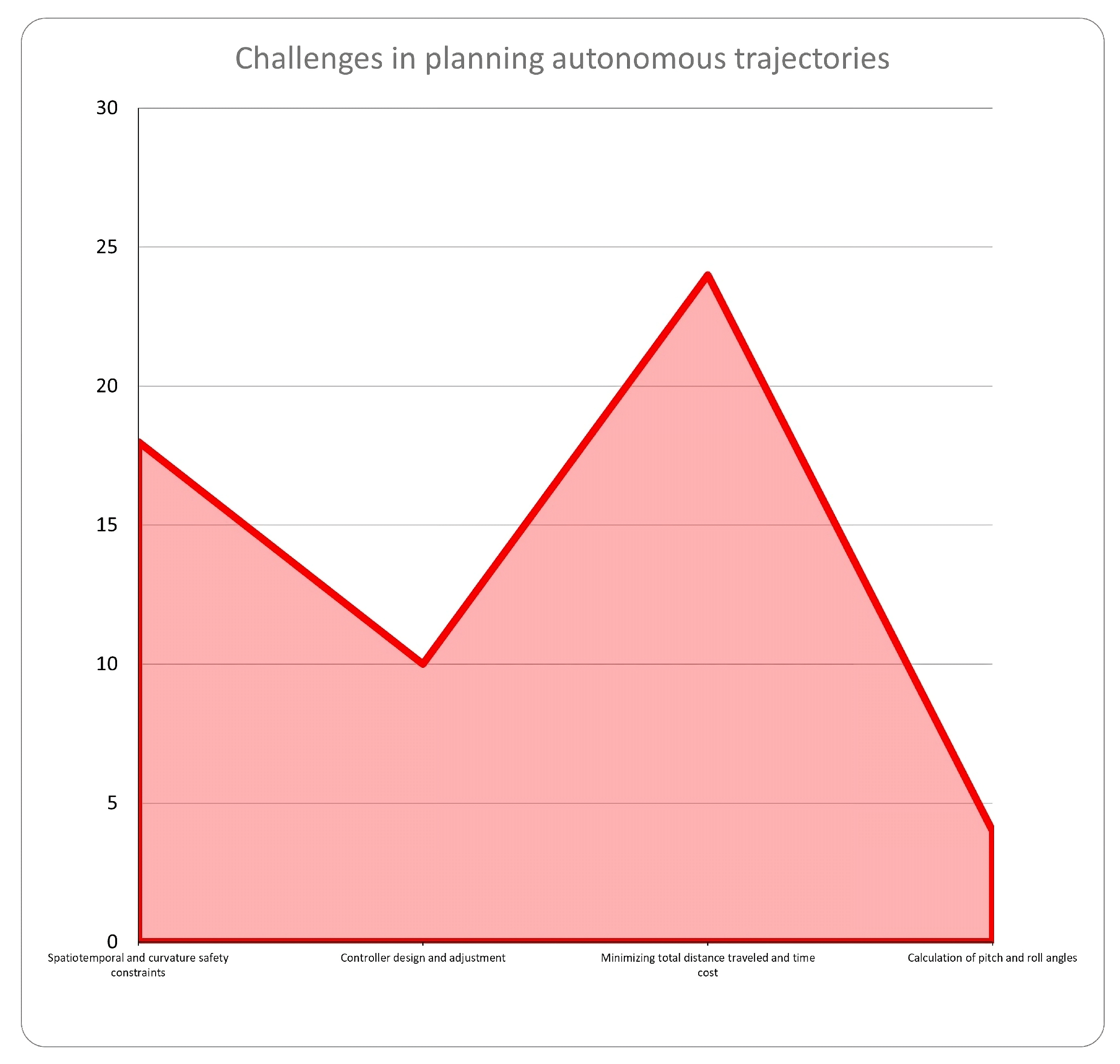
2.2. Trends in Path Planning Optimization
3. Background and Related Works
Route Optimization Applications
4. Discussion
5. Conclusions
6. Future Trends in Path Planning Optimization
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schwab, K. The Fourth Industrial Revolution: What it means, how to respond1. In Handbook of Research on Strategic Leadership in the Fourth Industrial Revolution; Edward Elgar Publishing: Cheltenham, UK, 2024; pp. 29–34. [Google Scholar]
- Da Silveira, F.; Da Silva, S.L.C.; Machado, F.M.; Barbedo, J.G.A.; Amaral, F.G. Farmers’ perception of the barriers that hinder the implementation of agriculture 4.0. Agric. Syst. 2023, 208, 103656. [Google Scholar] [CrossRef]
- Conrad, C.; Al-Rubaye, S.; Tsourdos, A. Intelligent embedded systems platform for vehicular cyber-physical systems. Electronics 2023, 12, 2908. [Google Scholar] [CrossRef]
- Shukla, S.; Hassan, M.F.; Tran, D.C.; Akbar, R.; Paputungan, I.V.; Khan, M.K. Improving latency in Internet-of-Things and cloud computing for real-time data transmission: A systematic literature review (SLR). Clust. Comput. 2023, 26, 2657–2680. [Google Scholar] [CrossRef]
- Erickson, B.; Fausti, S.W. The role of precision agriculture in food security. Agron. J. 2021, 113, 4455–4462. [Google Scholar] [CrossRef]
- United Nations. Transforming Our World: The 2030 Agenda for Sustainable Development. Available online: https://sdgs.un.org/2030agenda (accessed on 22 April 2025).
- Tura, N.; Ojanen, V. Sustainability-oriented innovations in smart cities: A systematic review and emerging themes. Cities 2022, 126, 103716. [Google Scholar] [CrossRef]
- Mathe, S.E.; Kondaveeti, H.K.; Vappangi, S.; Vanambathina, S.D.; Kumaravelu, N.K. A comprehensive review on applications of Raspberry Pi. Comput. Sci. Rev. 2024, 52, 100636. [Google Scholar] [CrossRef]
- Neamah, O.N.; Almohamad, T.A.; Bayir, R. Enhancing road safety: Real-time distracted driver detection using Nvidia Jetson Nano and YOLOv8. In Proceedings of the 2024 Zooming Innovation in Consumer Technologies Conference (ZINC), Novi Sad, Serbia, 28–29 May 2024; pp. 194–198. [Google Scholar]
- Jadhav, S.; Chaudhari, B.S. Embedded systems for low-power applications. In TinyML for Edge Intelligence in IoT and LPWAN Networks; Elsevier: Amsterdam, The Netherlands, 2024; pp. 13–26. [Google Scholar]
- Chattopadhyay, S. Embedded System Design; PHI Learning Pvt. Ltd.: Delhi, India, 2023. [Google Scholar]
- Rahmaniar, W.; Hernawan, A. Real-time human detection using deep learning on embedded platforms: A review. J. Robot. Control (JRC) 2021, 2, 462–468. [Google Scholar]
- Carvalho, G.; Cabral, B.; Pereira, V.; Bernardino, J. Edge computing: Current trends, research challenges and future directions. Computing 2021, 103, 993–1023. [Google Scholar] [CrossRef]
- Van Dinter, R.; Tekinerdogan, B.; Catal, C. Automation of systematic literature reviews: A systematic literature review. Inf. Softw. Technol. 2021, 136, 106589. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. Declaración PRISMA 2020: Una guía actualizada para la publicación de revisiones sistemáticas. Rev. Espa Nola Cardiol. 2021, 74, 790–799. [Google Scholar] [CrossRef]
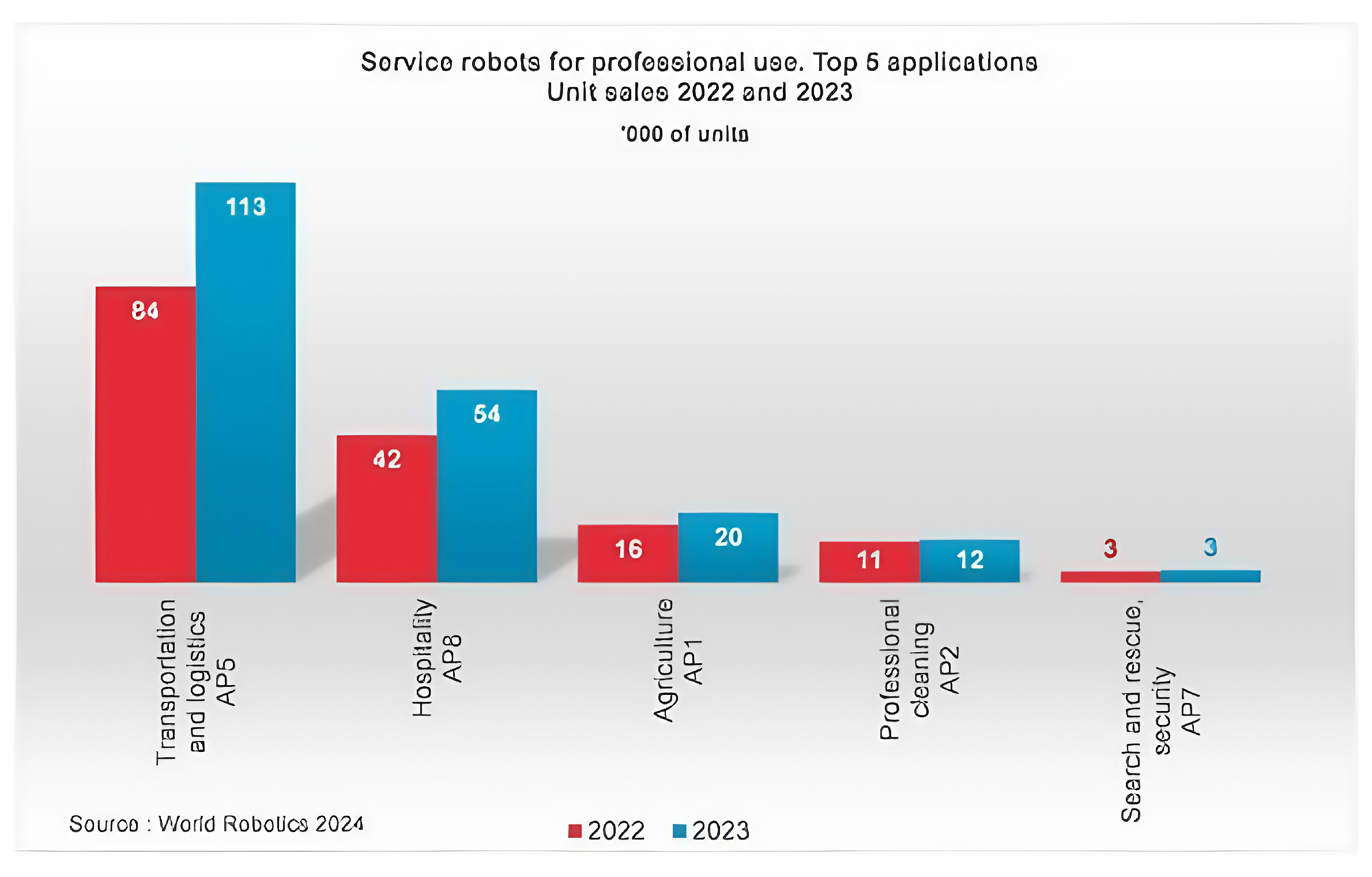
- International Federation of Robotics. World Robotics 2024. Available online: https://ifr.org/wr-service-robots/ (accessed on 22 April 2025).
- Parsons, T.; Baghyari, F.; Seo, J.; Kim, B.; Kim, M.; Lee, H. Surveillance Unmanned Ground Vehicle Path Planning with Path Smoothing and Vehicle Breakdown Recovery. Appl. Sci. 2024, 14, 7266. [Google Scholar] [CrossRef]
- Prasad, A.; Chaudhary, K.; Sharma, B.; Ali, A.S. Robot Path Planning and Motion Control: A Systematic Review. Eng. Sci. 2025, 33, 1354. [Google Scholar] [CrossRef]
- Furchì, A.; Lippi, M.; Carpio, R.F.; Gasparri, A. Route Optimization in Precision Agriculture Settings: A Multi-Steiner TSP Formulation. IEEE Trans. Autom. Sci. Eng. 2023, 20, 2551–2568. [Google Scholar] [CrossRef]
- Fotio Tiotsop, L.; Servetti, A.; Masala, E. An integer linear programming model for efficient scheduling of UGV tasks in precision agriculture under human supervision. Comput. Oper. Res. 2020, 114, 104826. [Google Scholar] [CrossRef]
- Prakash, R.; Dheer, D.K.; Kumar, M. Path Planning of UGV using Sampling-Based Method and PSO in 2D Map Configuration: A Comparative Analysis. In Proceedings of the 2020 International Conference on Emerging Frontiers in Electrical and Electronic Technologies (ICEFEET), Patna, India, 10–11 July 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, J.; Wang, J.; Zhang, X.; Wang, Y. Local Path Planning Algorithm for UGV Based on Improved Covariance Matrix Adaptive Evolution Strategy. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 1085–1091. [Google Scholar] [CrossRef]
- Schwenzer, M.; Ay, M.; Bergs, T.; Abel, D. Review on model predictive control: An engineering perspective. Int. J. Adv. Manuf. Technol. 2021, 117, 1327–1349. [Google Scholar] [CrossRef]
- Munoz-Ceballos, N.D.; Suarez-Rivera, G. Criterios de desempeño para evaluar algoritmos de navegación de robots móviles: Una revisión. Rev. Iberoam. Autom. Inform. Ind. 2022, 19, 132–143. [Google Scholar] [CrossRef]
- Katona, K.; Neamah, H.A.; Korondi, P. Obstacle Avoidance and Path Planning Methods for Autonomous Navigation of Mobile Robot. Sensors 2024, 24, 3573. [Google Scholar] [CrossRef]
- Batista, H.O.B.; Hudson, T.M.; de Carvalho, K.B.; Brandão, A.S. Q-Learning-Based Multi-Objective Global Path Planning for UGV Navigation. In Proceedings of the 2024 Latin American Robotics Symposium (LARS), Arequipa, Peru, 11–14 November 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, L.; Li, P.; Qian, S.; Quan, H.; Miao, J.; Liu, M.; Hu, Y.; Memetimin, E. Path planning technique for mobile robots: A review. Machines 2023, 11, 980. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, S.; Wen, Y.; Du, Z.; Xiao, C.; Huang, L.; Zhu, M. The review unmanned surface vehicle path planning: Based on multi-modality constraint. Ocean Eng. 2020, 200, 107043. [Google Scholar] [CrossRef]
- Chu, Y.; Gao, Q.; Yue, Y.; Lim, E.G.; Paoletti, P.; Ma, J.; Zhu, X. Evolution of Unmanned Surface Vehicle Path Planning: A Comprehensive Review of Basic, Responsive, and Advanced Strategic Pathfinders. Drones 2024, 8, 540. [Google Scholar] [CrossRef]
- Qin, H.; Shao, S.; Wang, T.; Yu, X.; Jiang, Y.; Cao, Z. Review of Autonomous Path Planning Algorithms for Mobile Robots. Drones 2023, 7, 211. [Google Scholar] [CrossRef]
- Majumdar, P.; Mitra, S.; Mirjalili, S.; Bhattacharya, D. Whale optimization algorithm-comprehensive meta analysis on hybridization, latest improvements, variants and applications for complex optimization problems. In Handbook of Whale Optimization Algorithm; Elsevier: Amsterdam, The Netherlands, 2024; pp. 81–90. [Google Scholar]
- Alyasseri, Z.A.A.; Alomari, O.A.; Al-Betar, M.A.; Makhadmeh, S.N.; Doush, I.A.; Awadallah, M.A.; Abasi, A.K.; Elnagar, A. Recent advances of bat-inspired algorithm, its versions and applications. Neural Comput. Appl. 2022, 34, 16387–16422. [Google Scholar] [CrossRef] [PubMed]
- Sampieri, H. Metodología de la Investigación, 6th ed.; Mc Graw Hill: Mexico City, Mexico, 2014. [Google Scholar]
- Ma, H.; Zhang, Y.; Sun, S.; Liu, T.; Shan, Y. A comprehensive survey on NSGA-II for multi-objective optimization and applications. Artif. Intell. Rev. 2023, 56, 15217–15270. [Google Scholar] [CrossRef]
- Abualigah, L.; Yousri, D.; Abd Elaziz, M.; Ewees, A.A.; Al-Qaness, M.A.; Gandomi, A.H. Aquila optimizer: A novel meta-heuristic optimization algorithm. Comput. Ind. Eng. 2021, 157, 107250. [Google Scholar] [CrossRef]
- Thayer, T.C. Planning Algorithms for Robots Operating in Vineyards. Ph.D. Thesis, University of California, Merced, CA, USA, 2021. [Google Scholar]
- Abujabal, N.; Fareh, R.; Sinan, S.; Baziyad, M.; Bettayeb, M. A comprehensive review of the latest path planning developments for multi-robot formation systems. Robotica 2023, 41, 2079–2104. [Google Scholar] [CrossRef]
- Zhou, C.; Huang, B.; Fränti, P. A review of motion planning algorithms for intelligent robots. J. Intell. Manuf. 2022, 33, 387–424. [Google Scholar] [CrossRef]
- Hichri, B.; Gallala, A.; Giovannini, F.; Kedziora, S. Mobile robots path planning and mobile multirobots control: A review. Robotica 2022, 40, 4257–4270. [Google Scholar] [CrossRef]
- WANG, C.; ZHANG, S.; MA, T.; XIAO, Y.; CHEN, M.Z.; WANG, L. Swarm intelligence: A survey of model classification and applications. Chin. J. Aeronaut. 2024, 38, 102982. [Google Scholar] [CrossRef]
- Yang, X.; Wu, F.; Li, R.; Yao, D.; Meng, L.; He, A. Real-Time Path Planning for Obstacle Avoidance in Intelligent Driving Sightseeing Cars Using Spatial Perception. Appl. Sci. 2023, 13, 11183. [Google Scholar] [CrossRef]
- Haruna, Z.; Mu’azu, M.B.; Umar, A.; Ufuoma, G.O. Path Planning Algorithms for Mobile Robots: A Survey. In Motion Planning for Dynamic Agents; Ali, Z.A., Israr, A., Eds.; IntechOpen: Rijeka, Croatia, 2023; Chapter 5. [Google Scholar] [CrossRef]
- Euldji, R.; Batel, N.; Rebhi, R.; Kaid, N.; Tearnbucha, C.; Sudsutad, W.; Lorenzini, G.; Ahmad, H.; Ameur, H.; Menni, Y. Optimal Backstepping-FOPID Controller Design for Wheeled Mobile Robot. J. Eur. Syst. Autom. 2022, 55, 97–107. [Google Scholar] [CrossRef]
- Haruna, Z.; Mu’azu, M.B.; Sha’aban, Y.A.; Adedokun, E.A. Obstacle Avoidance Scheme Based Elite Opposition Bat Algorithm for Unmanned Ground Vehicles. Covenant J. Inform. Commun. Technol. 2021, 9. Available online: https://journals.covenantuniversity.edu.ng/index.php/cjict/article/view/2615 (accessed on 22 April 2025).
- Zhang, L.; Cai, K.; Sun, Z.; Bing, Z.; Wang, C.; Figueredo, L.; Haddadin, S.; Knoll, A. Motion Planning for Robotics: A Review for Sampling-based Planners. arXiv 2024, arXiv:2410.19414. [Google Scholar] [CrossRef]
- Quan, Y.; Ouyang, H.; Zhang, C.; Li, S.; Gao, L.Q. Mobile Robot Dynamic Path Planning Based on Self-Adaptive Harmony Search Algorithm and Morphin Algorithm. IEEE Access 2021, 9, 102758–102769. [Google Scholar] [CrossRef]
- Stodola, P.; Michenka, K.; Nohel, J.; Rybanský, M. Hybrid Algorithm Based on Ant Colony Optimization and Simulated Annealing Applied to the Dynamic Traveling Salesman Problem. Entropy 2020, 22, 884. [Google Scholar] [CrossRef]
- Ali, A.M.; Ngadi, M.A.; Sham, R.; Al_Barazanchi, I.I. Enhanced QoS Routing Protocol for an Unmanned Ground Vehicle, Based on the ACO Approach. Sensors 2023, 23, 1431. [Google Scholar] [CrossRef]
- Toscano-Moreno, M.; Mandow, A.; Martínez, M.A.; García-Cerezo, A. DEM-AIA: Asymmetric inclination-aware trajectory planner for off-road vehicles with digital elevation models. Eng. Appl. Artif. Intell. 2023, 121, 105976. [Google Scholar] [CrossRef]
- Ivić, S.; Andrejčuk, A.; Družeta, S. Autonomous control for multi-agent non-uniform spraying. Appl. Soft Comput. 2019, 80, 742–760. [Google Scholar] [CrossRef]
- Ni, J.; Wang, X.; Tang, M.; Cao, W.; Shi, P.; Yang, S.X. An Improved Real-Time Path Planning Method Based on Dragonfly Algorithm for Heterogeneous Multi-Robot System. IEEE Access 2020, 8, 140558–140568. [Google Scholar] [CrossRef]
- Fan, Y.; Zhang, S.; Yang, H.; Xu, D.; Wang, Y. An Improved Future Search Algorithm Based on the Sine Cosine Algorithm for Function Optimization Problems. IEEE Access 2023, 11, 30171–30187. [Google Scholar] [CrossRef]
- Mir, I.; Gul, F.; Mir, S.; Khan, M.A.; Saeed, N.; Abualigah, L.; Abuhaija, B.; Gandomi, A.H. A Survey of Trajectory Planning Techniques for Autonomous Systems. Electronics 2022, 11, 2801. [Google Scholar] [CrossRef]
- Pianini, D.; Kalogeraki, V.; Schmidt, J.; Schilcher, U.; Vogell, A.; Bettstetter, C.; Lesch, V.; Hadry, M.; Krupitzer, C.; Kounev, S. Autonomous and Adaptive Systems. ACM Trans. Auton. Adapt. Syst. 2023, 18. [Google Scholar]
- Baccari, S.; Hadded, M.; Ghazzai, H.; Touati, H.; Elhadef, M. Anomaly detection in connected and autonomous vehicles: A survey, analysis, and research challenges. IEEE Access 2024, 12, 19250–19276. [Google Scholar] [CrossRef]
- Zhang, X.; Guo, Y.; Yang, J.; Li, D.; Wang, Y.; Zhao, R. Many-objective evolutionary algorithm based agricultural mobile robot route planning. Comput. Electron. Agric. 2022, 200, 107274. [Google Scholar] [CrossRef]
- Tang, C.; Abbatematteo, B.; Hu, J.; Chandra, R.; Martín-Martín, R.; Stone, P. Deep reinforcement learning for robotics: A survey of real-world successes. Proc. AAAI Conf. Artif. Intell. 2025, 39, 28694–28698. [Google Scholar]
- Kim, D.; Lee, H.; Cha, J.; Park, J. Bridging the Reality Gap: Analyzing Sim-to-Real Transfer Techniques for Reinforcement Learning in Humanoid Bipedal Locomotion. IEEE Robot. Autom. Mag. 2024. [Google Scholar] [CrossRef]
- Zulkarnain; Putri, T.D. Intelligent transportation systems (ITS): A systematic review using a Natural Language Processing (NLP) approach. Heliyon 2021, 7, e08615. [Google Scholar] [CrossRef]
- Aitsam, M.; Davies, S.; Di Nuovo, A. Neuromorphic computing for interactive robotics: A systematic review. IEEE Access 2022, 10, 122261–122279. [Google Scholar] [CrossRef]
- Kegeleirs, M.; Grisetti, G.; Birattari, M. Swarm SLAM: Challenges and perspectives. Front. Robot. AI 2021, 8, 618268. [Google Scholar] [CrossRef]
- Olutimehin, A.T.; Ajayi, A.J.; Metibemu, O.C.; Balogun, A.Y.; Oladoyinbo, T.O.; Olaniyi, O.O. Adversarial threats to AI-driven systems: Exploring the attack surface of machine learning models and countermeasures. J. Eng. Res. Rep. 2025, 27, 342. [Google Scholar] [CrossRef]
- Salvato, E.; Fenu, G.; Medvet, E.; Pellegrino, F.A. Crossing the reality gap: A survey on sim-to-real transferability of robot controllers in reinforcement learning. IEEE Access 2021, 9, 153171–153187. [Google Scholar] [CrossRef]
- Thornblade, L.W.; Fong, Y. Simulation-based training in robotic surgery: Contemporary and future methods. J. Laparoendosc. Adv. Surg. Tech. 2021, 31, 556–560. [Google Scholar] [CrossRef] [PubMed]
- Annaswamy, A.M. Adaptive control and intersections with reinforcement learning. Annu. Rev. Control. Robot. Auton. Syst. 2023, 6, 65–93. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, H. Enhancing robot path planning through a twin-reinforced chimp optimization algorithm and evolutionary programming algorithm. IEEE Access 2023, 12, 170057–170078. [Google Scholar] [CrossRef]
- Yépez-Ponce, D.F.; Salcedo, J.V.; Rosero-Montalvo, P.D.; Sanchis, J. Mobile robotics in smart farming: Current trends and applications. Front. Artif. Intell. 2023, 6, 1213330. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Review Questions | RQ1: How is agricultural path planning optimization carried out? |
| RQ2: What tools, techniques and technologies are employed for the best possible path planning? | |
| RQ3: What are real-time path planning’s primary obstacles? | |
| Selection Criteria | Articles required for inclusion criteria: |
| - Research that was released between 2019 and 2024. | |
| - The research questions are addressed by the studies. | |
| - The use of ground mobile robotics in trajectory planning was the main topic of the literature. | |
| - The literature focused on the application of ground mobile robotics in trajectory planning. | |
| Articles with early access. | |
| Research that includes efficiency metrics. | |
| Research that has at least 10 citations. | |
| Research from indexed journals. | |
| Articles among the exclusion criteria: | |
| The use of airborne or cooperative mobile robotics in trajectory planning was the subject of the study. | |
| The complete texts of several publications were unavailable. | |
| Articles written in languages other English. | |
| Aerial (UAV) or maritime (USV) systems not hybridized with UGVs. | |
| Applications that do not use UGVs. | |
| Literature Search | Sources: ScienceDirect, Scopus, Web of Science, IEEE Xplore and Google Scholar. |
| The following search strings were used: | |
| - “Route Optimization” AND (“Agricultural Robots" OR “Warehouse Robots”) AND “Heuristic Algorithm”. | |
| - “Path Planning” AND “UGV” AND “Heuristic Optimization”. | |
| - “Path Optimization” AND “UGV” AND “Multi-Objective Optimization”. | |
| Search Dates | The information search was carried out from October 2024 to March 2025. |
| Applications | Control Techniques | Description of Algorithms | Hardware/Software | Execution Time | Evaluation Criteria | Citation |
|---|---|---|---|---|---|---|
| Patrol operations, target tracking, anti-submarine warfare, water sampling and monitoring and maritime search and rescue. | A*, RRT*, Potential fields, PSO, cuckoo search and RL. | A* and RRT* for global and local planning; PSO and cuckoo search for route optimization on embedded hardware; RL for dynamic adaptation. | MATLAB (R2025a) for simulations, embedded software developed for ARM microcontrollers and specific simulators for validation of local planners. | Cuckoo search up to 89% less time than PSO and ARM Cortex M4 generates waypoints in less than 6 s. | Comparison of total distance traveled, computational execution time, route stability and robustness (statistical evaluation over multiple runs), evaluation in simulated environments and real maps (GPS data) and validation on embedded hardware with resource constraints. | [28] |
| Autopilot systems. | PSO, ACO, ABC, BFO, Boids, Vicsek, Leadership and empirical models. | Bio-inspired algorithms for optimization and coordination in swarms, applied in robotics and multi-agent systems. | Simulation without specifying the software used. | Unspecified | Iterations, fitness, convergence time, success. | [40] |
| Autonomous surveillance systems. | ACO, GA, corner-cutting and Reeds–Shepp. | ACO for optimal coverage routing; GA for sub-area assignment; Reeds–Shepp and corner-cutting for smoothing and adapting routes to kinematic constraints; automatic failover. | Simulation; UGVs modeled with real parameters; unspecified software | 14.3–18.5 s | Total distance traveled, run time, coverage (%), recovery from failures | [17] |
| Agricultural tasks in precision agriculture (PA) environments, such as inspections and pesticide application. | MILP for Multi-Steiner TSP (optimal and suboptimal), greedy algorithm. | MILP for accurate and suboptimal routing and tasking optimization; greedy algorithm for fast and comparative solutions. | Simulation on PC (i7-9750H, 16 GB RAM), Python 3.7, CPLEX 12.10 | 0.6 to 813.7 s | Makespan, cumulative time, optimality gap (%), computational time. | [19] |
| Perform tasks efficiently and intelligently. | Dijkstra, A*, D*, RRT, PRM, ACO, PSO, Genetics, Firefly, RL, neural networks, hybrids. | Classical, heuristic, sampling-based and learning algorithms for planning and control in mobile robotics. | Simulators, mobile robots, various sensors. | Relative efficiency between algorithms. | Path length, computation time, nodes scanned, success rate, robustness, efficiency | [18] |
| Material handling, underwater robots for sampling and aerial robots for search and rescue operations. | A*, Dijkstra, GA, PSO, ACO, ABC, Firefly, RRT, PRM, RL, DWA, Potential fields. | A* finds optimal paths in static environments; Dijkstra guarantees shortest path in graphs, GA finds optimal paths in large and complex search spaces, PSO optimizes paths in complex and dynamic environments, ACO finds optimal paths for multipath and dynamic problems. ABC and Firefly optimize routes using bio-inspired strategies. RRT and PRM enable route finding in high-dimensional spaces with complex obstacles. Potential fields and DWA enable real-time reactive obstacle avoidance and RL allows the robot to learn optimal routes by interacting with the environment, adapting to changes. | Relative efficiency between algorithms. | Simulators and mobile robots. | Path length, computation time, nodes scanned, success rate, robustness, energy consumption | [30] |
| Tourist vehicles with intelligent driving. | Dijkstra, A*, RRT, PRM, Potential fields, ACO, PSO, GA, neural networks, fuzzy logic. | Dijkstra and A* optimize routes in known maps; RRT and PRM are used for routes in complex and high-dimensional spaces; Potential fields reactively avoid obstacles; ACO, PSO and GA optimize complex and multi-criteria environments; neural networks and fuzzy logic for adaptivity and learning in dynamic environments. | ROS Noetic, MATLAB, C++ 20, Python. | Relative efficiency and robustness among algorithms. | Path length, computation time, smoothness, safety, energy consumption, success rate. | [27] |
| Agricultural activities include vine pruning, pesticide spraying, weeding, seed sowing and yield estimation. | Heuristics for OP/TOP/BOOP/SOPCC (Greedy Row, Greedy Partial-Row, Guided Local Search, GPR), linear programming, CMDP, Lagrange. | Heuristic and specialized algorithms enable optimal route planning in large-scale real-world environments, considering multiple robots, targets and uncertainty scenarios, with practical computational times and proven scalability. | Simulation on standard PC, real vineyard data, optimization tools, high-level languages. | Heuristics < 1 s for 10,000 nodes; multi-robot/stochastic variants from seconds to minutes for large instances. | Total reward, path length, computational time, probability of success and comparison with optima. | [36] |
| Navigation of mobile robots in unstructured environments and complex terrains. | Local planning based on spatial perception; trajectory generation with B-spline; comparison with Bézier curves. | The B-spline algorithm generates smoother and more stable avoidance trajectories than Bézier, reducing steering angles and yaw fluctuations, improving safety and comfort in real-time obstacle avoidance. | Real vehicle with LiDAR, cameras, GNSS/GPS; simulation in Simulink/Carsim. | Real-time operation and low computational load. | Smoothness of trajectory (steering angle, yaw variation), quantitative comparison with Bézier, validation in simulation and real tests. | [41] |
| UGV navigation system. | PRM, Bi-RRT, PSO. | PRM is good for multi-query environments, but generates longer routes and is slower. Bi-RRT is faster and more efficient in length, which is ideal for complex environments. PSO produces smoother and more optimizable routes, but at the cost of longer computation time. | Intel Core i5-4300U, MATLAB 2018, occupancy grid test maps and binary images. | PRM: 0.52 s; Bi-RRT: 0.32 s; PSO: 2.73 s. | Execution time, path length, path smoothness, program complexity. | [21] |
| Transportation (cargo and parcel delivery), data collection and military activities (surveillance, bomb detection, search and rescue and reconnaissance). | Cellular decomposition, Potential field, Roadmap, Subgoal network, Dijkstra, A*, D*, genetic algorithm, neural networks, fuzzy logic. | Classical algorithms are optimal in simple environments, but costly in complexity; A* and D* are efficient and adaptive in dynamic environments; GA explores large search spaces and AI (fuzzy logic/networks) generate adaptability and learning in uncertain environments. | MATLAB, Python, C++. | Relative efficiency and scalability. | Path length, computation time, iterations, success rate, robustness, energy consumption. | [42] |
| Trajectory tracking of wheeled mobile robots (WMRs). | WOA, GWO, PSO, HPSOGWO, HWGO (all for optimization of FOPID parameters). | HWGO achieves the best FOPID tuning, with lower integral error, lower overshoot and faster convergence than the other methods. | MATLAB–Simulink | HWGO: 10.7 s; GWO: 11.8 s; PSO: 12.5 s; WOA: 13.2 s; HPSOGWO: 14.1 s. | ISE, settling time, overshoot, steady-state error, convergence time. | [43] |
| Environmental monitoring, reconnaissance and search and rescue operations. | Elite Opposing Bat Algorithm (EOBA), Bat Algorithm (BA), PSO. | EOBA generates shorter and faster paths, avoiding obstacles more efficiently than BA and PSO, with shorter time and path length; optimal for 0.3 m threshold. | MATLAB/Simulink, HC-SR04 ultrasonic sensor (simulated), map generated from photo with Samsung Galaxy A30. | EOBA: 1.2 s; BA: 3.0 s; PSO: 2.8 s (60% reduction with EOBA). | Route length, arrival time, threshold distance for avoidance, quantitative comparison between algorithms. | [44] |
| Obstacle avoidance. | Dijkstra, Floyd–Warshall, Bellman–Ford, APF, Bug, VFH, PRM, RRT, CD, FGM, A*, lógica difusa, PSO, GA, CSA, ABC, ACO, GWO, GJO, ANN, DL, DRL, MPC, híbridos. | Dijkstra, FW, BF optimal but slow on large maps; A* efficient and adaptive; sampling-based (PRM and RRT) fast in high dimension; bio-inspired (PSO, GA and ACO) find optimal solutions in complex problems; APF, Bug, VFH local and reactive navigation; AI (ANN, DL, DRL) learning and adaptivity; Hybrids combine advantages of several methods. | MATLAB, Python, C++, ROS. | Relative efficiency and scalability. | Path length, computation time, success rate, iterations, robustness, energy consumption. | [25] |
| Dynamic path planning. | ISAHS (Improved Harmonic Search), Morphin Algorithm. | ISAHS finds shorter, safer and faster routes than HS, PSO and GA; Morphin enables efficient real-time avoidance of moving obstacles, ensuring safe and collision-free navigation. | MATLAB; static and dynamic environment maps. | ISAHS: 0.82 s; HS: 1.15 s; Morphin real-time response ms. | Path length, degree of collision, computation time, iterations, avoidance success rate. | [45,46] |
| Military Environments in Command, Control, Communication, Information Technology, Intelligence, Surveillance and Reconnaissance (C4ISR) Systems. | Hybrid algorithm based on ACO and Simulated Annealing (SA). | The ACO+SA hybrid algorithm was used to solve the Dynamic Traveling Salesman Problem (DTSP), taking advantage of information transfer (pheromone matrix) between dynamic iterations. ACO handles solution construction and global exploration, while SA is used for local refinement and avoidance of local optima. | The experiments were performed in a standard computational environment. | For the “eil51” instance, the average time was 0.46 s; for ‘kroA100’ it was 3.47 s and for “pr2392” it was 1216.14 s. | Total cost of the run (objective function), comparison with other benchmark algorithms (best obtained cost and computation time) and statistical analysis of the results in multiple runs. | [47] |
| Naval operations, search and rescue, environmental monitoring and surveillance. | Dijkstra, A*, Uniform Cost Search (UCS), heuristic search algorithms, algorithms incorporating temporal dynamics and kinematic constraints, algorithms with real-time environmental interaction, machine learning, predictive and multi-agent planning. | Basic algorithms are used for navigation in static and known environments, while search algorithms are used in semi-dynamic scenarios, considering vehicle dynamics and moving obstacles. Advanced algorithms are applied in highly dynamic environments, integrating real-time sensor data and predictive capabilities for robust autonomous navigation. | Real USVs with sensors such as LiDAR, sonar, GPS and simulation environments (ROS, MATLAB/Simulink, C++ and Python). | A* and Dijkstra solve 100 × 100 node maps in less than 1 s, and advanced algorithms may require up to 10 s per iteration in complex scenarios. | Path length, computation time, success rate, minimum distance to obstacles and energy consumption. | [29] |
| Fire fighting. | ACO adapted for VANET’s (vehicular ad hoc networks) and optimization of UGV routes. Multi-objective approach to optimize QoS considering distance, disconnection probability and latency. | The ACO algorithm is used to dynamically select the best route for UGVs in VANET networks, optimizing QoS (latency, delivery, throughput) and avoiding congested or interrupted routes in real time. | The UGV is equipped with a digital map, GPS and navigation model. They employ VANET simulators and network modeling tools. | Average latency from 0.8 s to 1.2 s for A*, 1.7 s for SADV. Packet delivery rate of 90% for A* and 85% for SADV. Average throughput of 950 Kbps for A* and 800 Kbps for SADV. | Latency, packet delivery rate, throughput, number of hops and path stability. | [48] |
| Safe and efficient path planning. | DEM-AIA with pitch and roll tilt estimation. | DEM-AIA is used to plan safe and efficient trajectories for UGVs in rough terrain, considering inclination and safe speed in each segment. The algorithm calculates, for each segment, the maximum allowable speed according to pitch/roll and vehicle limitations. | Simulations and experiments in real and synthetic environments implemented with Python on a standard computer. | DEM-AIA between 0.01 s and 0.3 s for 100 × 100 cell maps. For 400 × 400 cell maps, approximately 1.2 s. | Total travel time, path length, number of segments, speed changes and computation time. | [49] |
| Non-uniform application of agrochemicals. | Multi-agent area coverage algorithm Heat Equation Driven Area Coverage (HEDAC). | HEDAC is used to autonomously plan and control the trajectory for non-uniform spraying in agriculture. | Standard computer simulations were implemented for coverage testing and multi-agent control on synthetic scenarios and real crop maps. | HEDAC achieves convergence 35% to 65% faster than Lawnmower and 15% to 50% faster than SMC. | Convergence time, coverage error, over-spraying percentage and tests in synthetic and real scenarios. | [50] |
| Real-time path planning for a heterogeneous multi-robot system. | Enhanced Dragonfly Algorithm (IDA) and bio-inspired neural networks (BINNs). | IDA is used to plan real-time trajectories for heterogeneous robot systems in unknown and dynamic 3D environments. The environment is modeled as a topological neural network, and IDA optimizes the trajectory by considering obstacles and cooperation between robots. | Standard PC and 3D simulation environments. | For a 3D environment of 50 × 50 × 10 nodes: IDA s, PSO s, RRT s and ACO s. | Computation time, path length and success rate. | [51] |
| Global optimization problems, 0-to-1 knapsack problems, path planning and image processing problems. | Future search algorithm based on the sine–cosine algorithm (FSASCA). | FSASCA is used to solve optimization problems of continuous functions, both low and high dimensional. The algorithm improves the exploitation and exploration capability, achieving better results in accuracy, convergence speed and robustness against multimodal and high complexity functions. | Standard PC with own implementation. | FSASCA = 51.2 ms, FSA = 69.5 ms, CS = 74.1 ms, FPA = 78.3 ms and SA = 90.7 ms. | Best value found, mean, standard deviation, convergence time, number of iterations, Wilcoxon rank sum test and convergence plots, boxplots and search paths. | [52] |
| Dynamic route planning. | Dynamic programming, direct and indirect methods, Runge–Kutta, Newton–Raphson, bisection, ACO, PSO, GWO, WO, Grasshopper Algorithm, Simulated Annealing, Harmony Search, Aquila Optimizer, reinforcement learning and neural networks. | Classifies, compares and discusses the use of numerical, bio-inspired and hybrid algorithms for trajectory planning in autonomous systems. | ROSbot 2.0, Pioneer 3-DX, Husarian ROSbot, ROS, MATLAB, Saphira, LiDAR, cameras and GPS. | PSO for planning on 100 × 100 node maps s; ACO s; Direct numerical methods s. | Path length, computation time, success rate, energy consumption, minimum distance to obstacles and robustness to dynamic environments. | [53] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yépez-Ponce, D.F.; Montalvo, W.; Guamán-Gavilanes, X.A.; Echeverría-Cadena, M.D. Route Optimization for UGVs: A Systematic Analysis of Applications, Algorithms and Challenges. Appl. Sci. 2025, 15, 6477. https://doi.org/10.3390/app15126477
Yépez-Ponce DF, Montalvo W, Guamán-Gavilanes XA, Echeverría-Cadena MD. Route Optimization for UGVs: A Systematic Analysis of Applications, Algorithms and Challenges. Applied Sciences. 2025; 15(12):6477. https://doi.org/10.3390/app15126477
Chicago/Turabian StyleYépez-Ponce, Dario Fernando, William Montalvo, Ximena Alexandra Guamán-Gavilanes, and Mauricio David Echeverría-Cadena. 2025. "Route Optimization for UGVs: A Systematic Analysis of Applications, Algorithms and Challenges" Applied Sciences 15, no. 12: 6477. https://doi.org/10.3390/app15126477
APA StyleYépez-Ponce, D. F., Montalvo, W., Guamán-Gavilanes, X. A., & Echeverría-Cadena, M. D. (2025). Route Optimization for UGVs: A Systematic Analysis of Applications, Algorithms and Challenges. Applied Sciences, 15(12), 6477. https://doi.org/10.3390/app15126477