
Control and Real-Time Monitoring of Autonomous Underwater Vehicle Through Underwater Wireless Optical Communication

 , , ,
, , , 
Abstract
1. Introduction
2. AUV Design and Construction
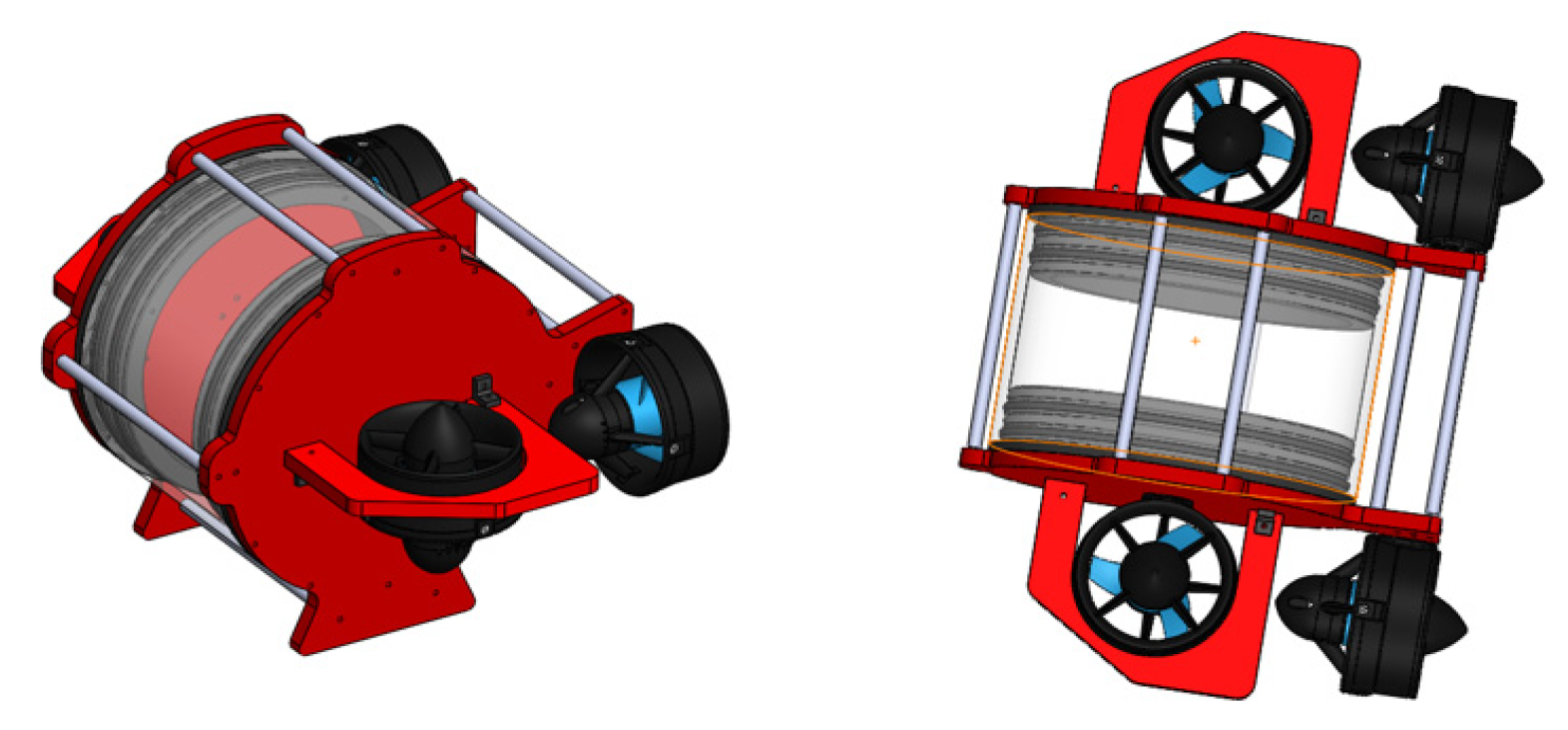
2.1. AUV Structure
2.2. System Configuration and Dynamics
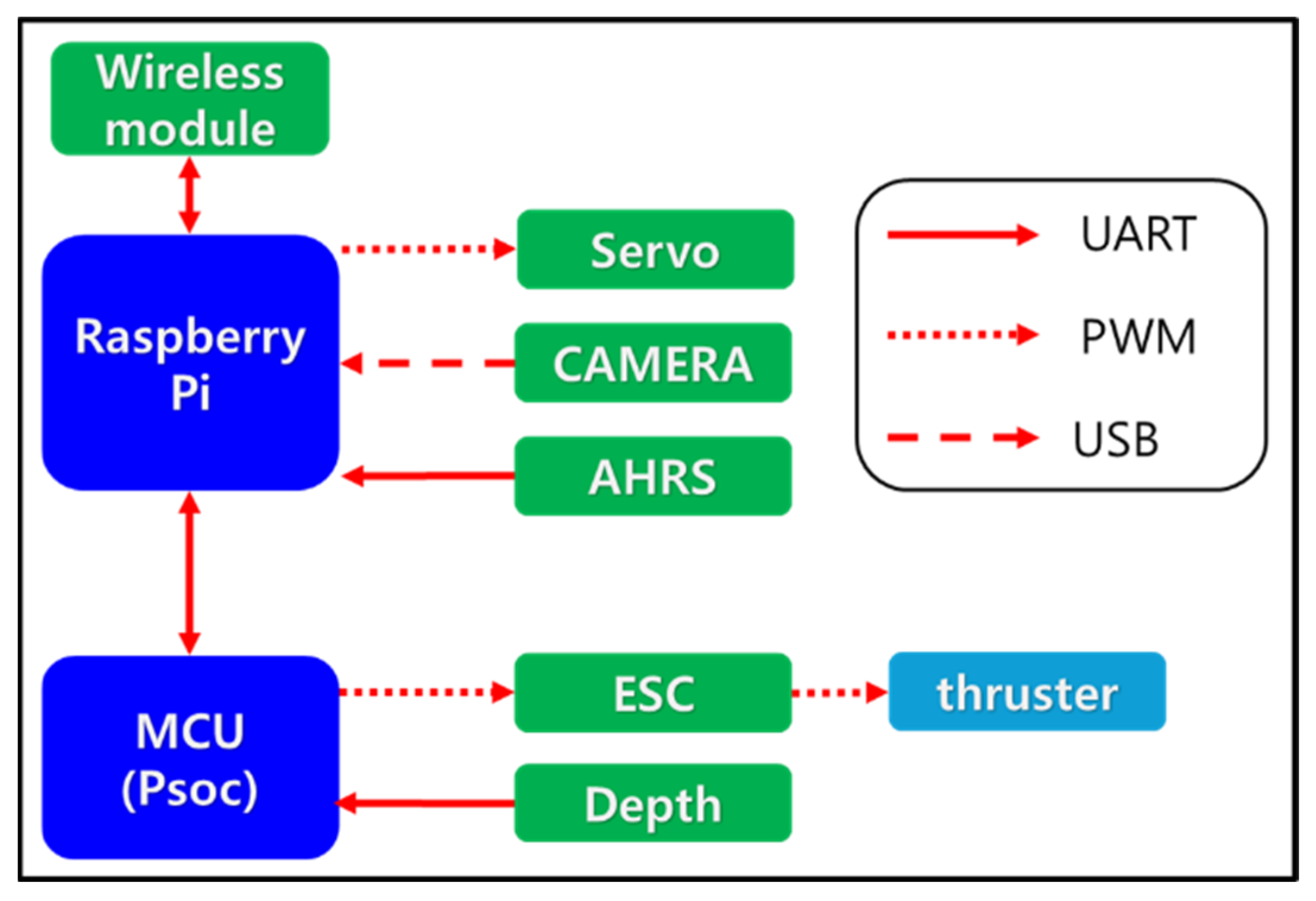
2.3. Control System and Sensors
2.4. Altitude Control Algorithm
3. Underwater Wireless Optical Communication System
3.1. Structure of UWOC
3.2. LED Light Attenuation with Communication Distance
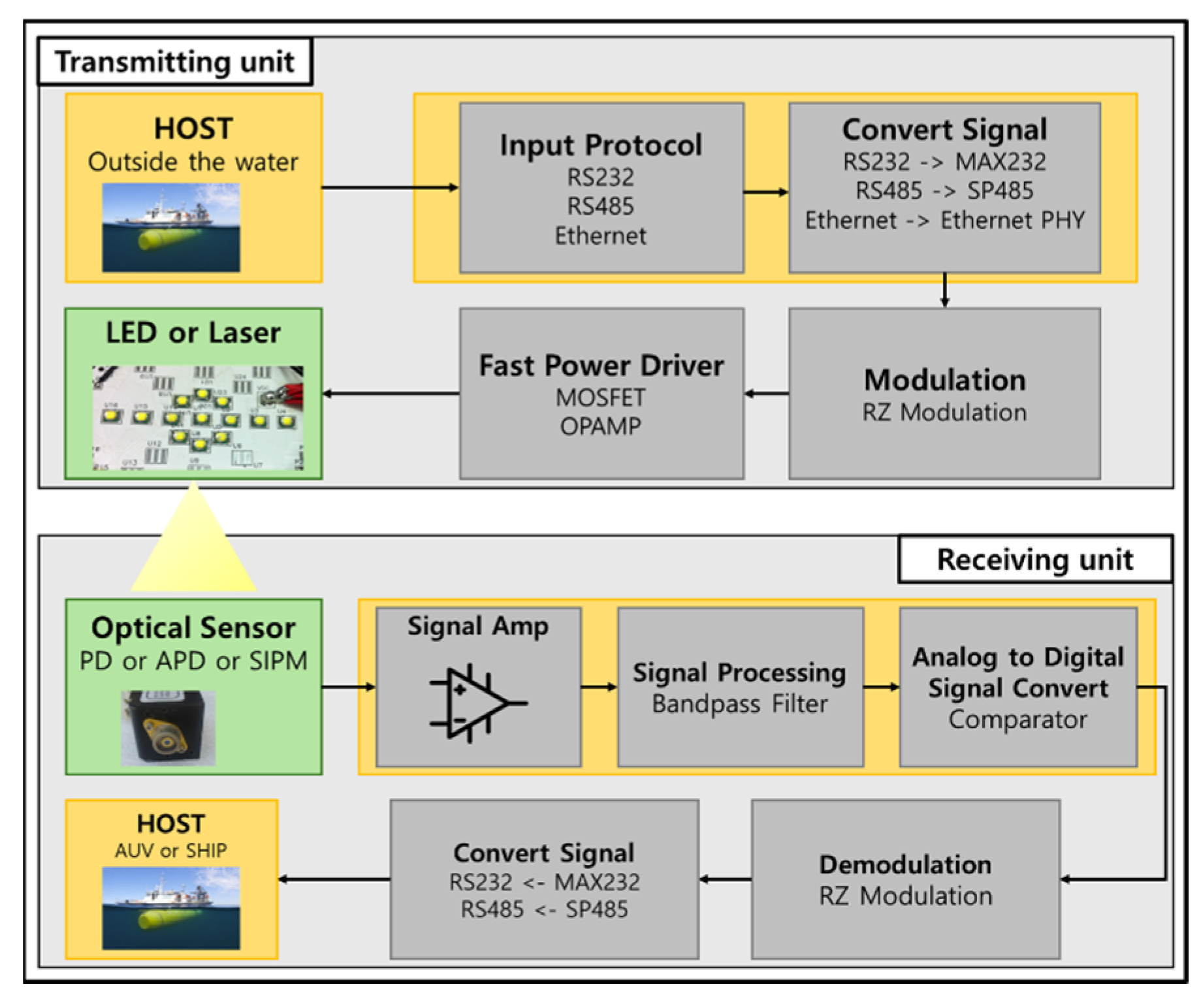
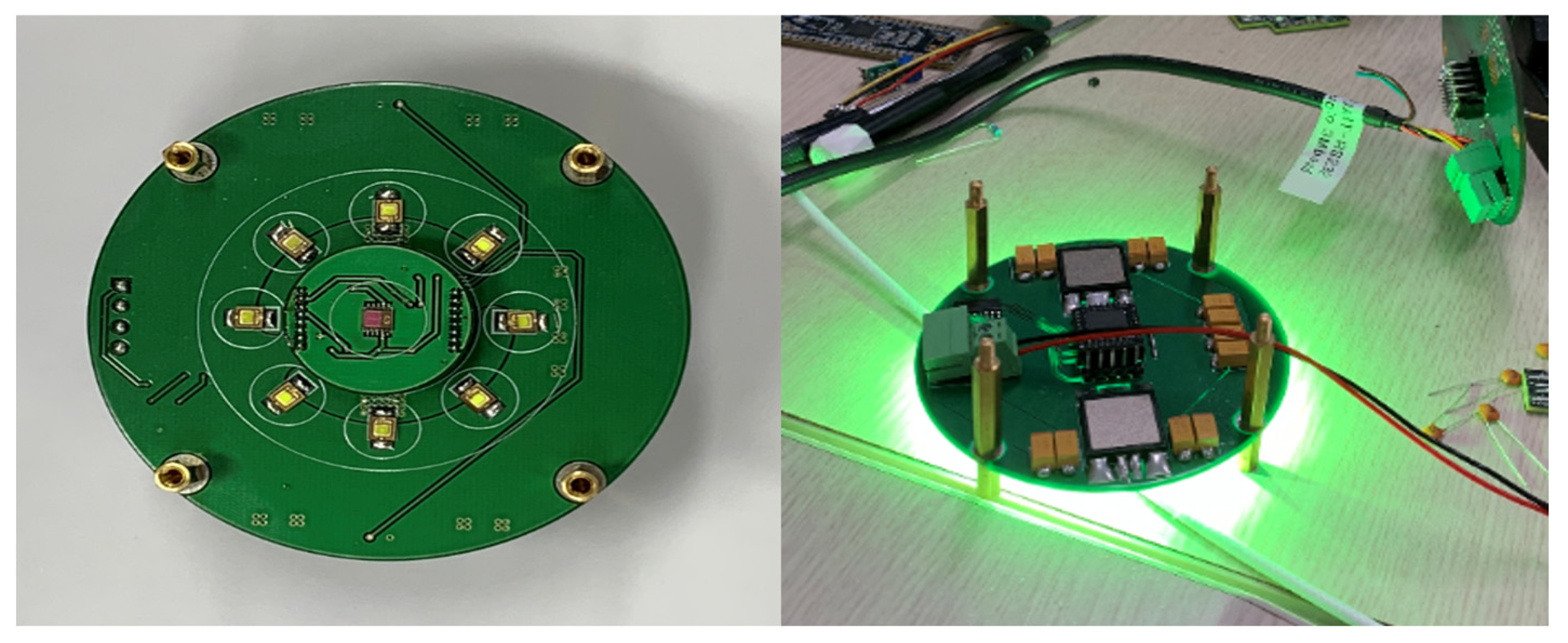
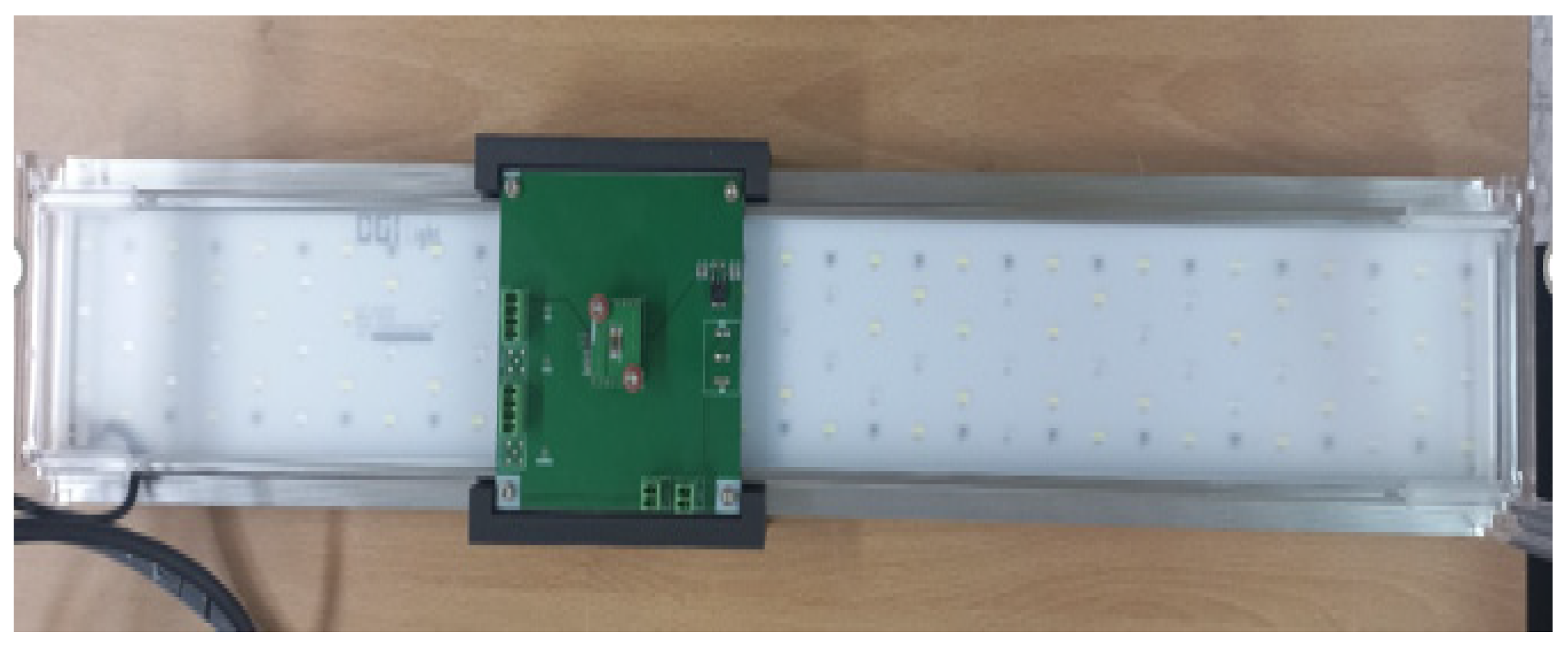
3.3. Hardware Design of Optical Communications System
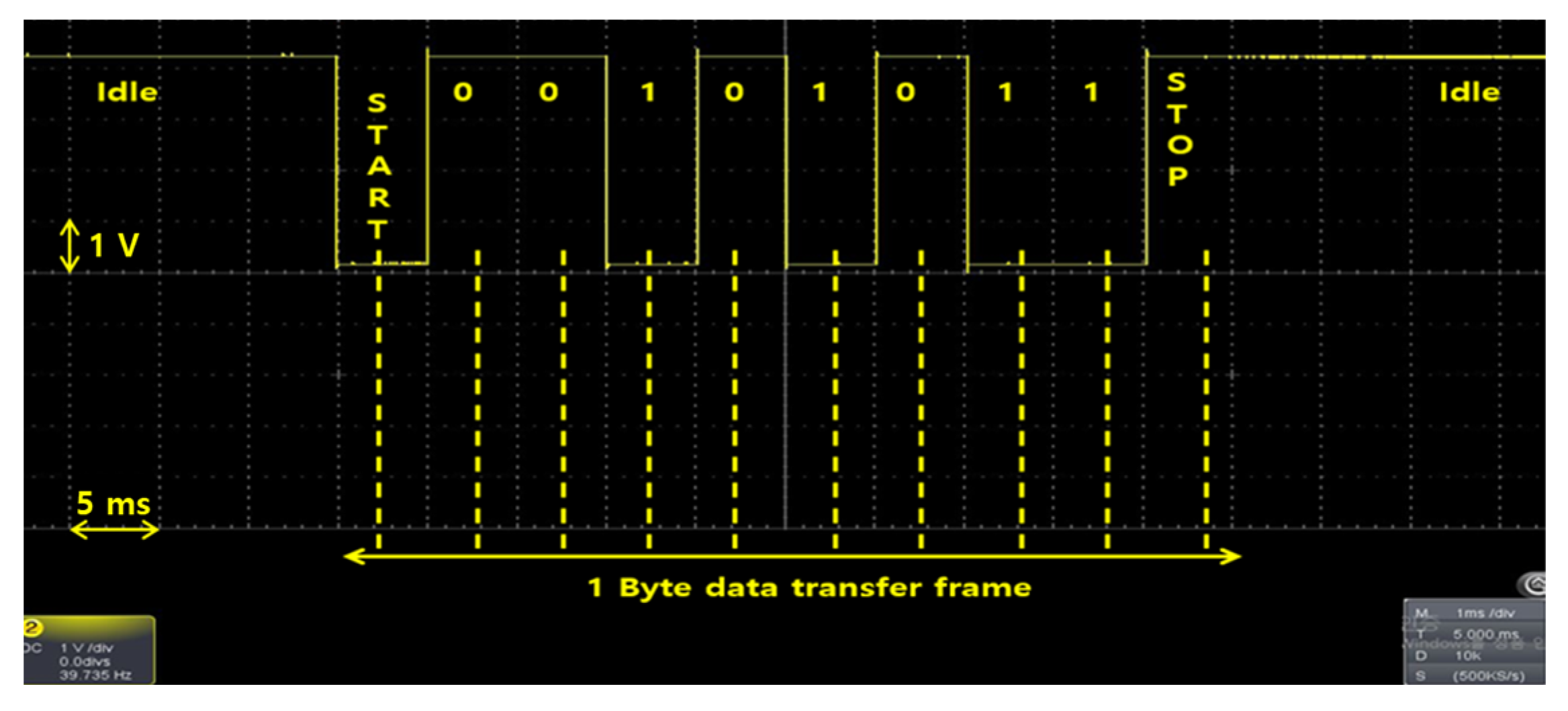
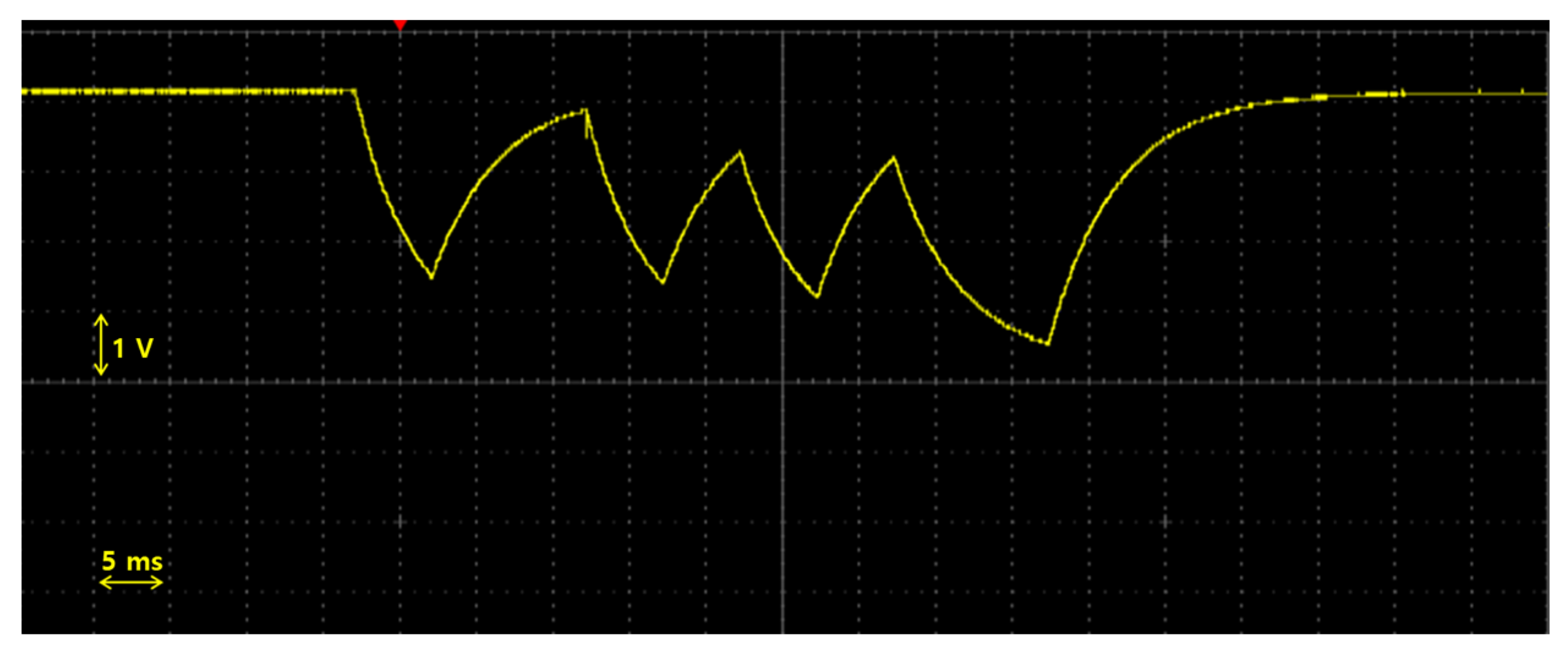
3.4. UWOC Light Modulation Technique
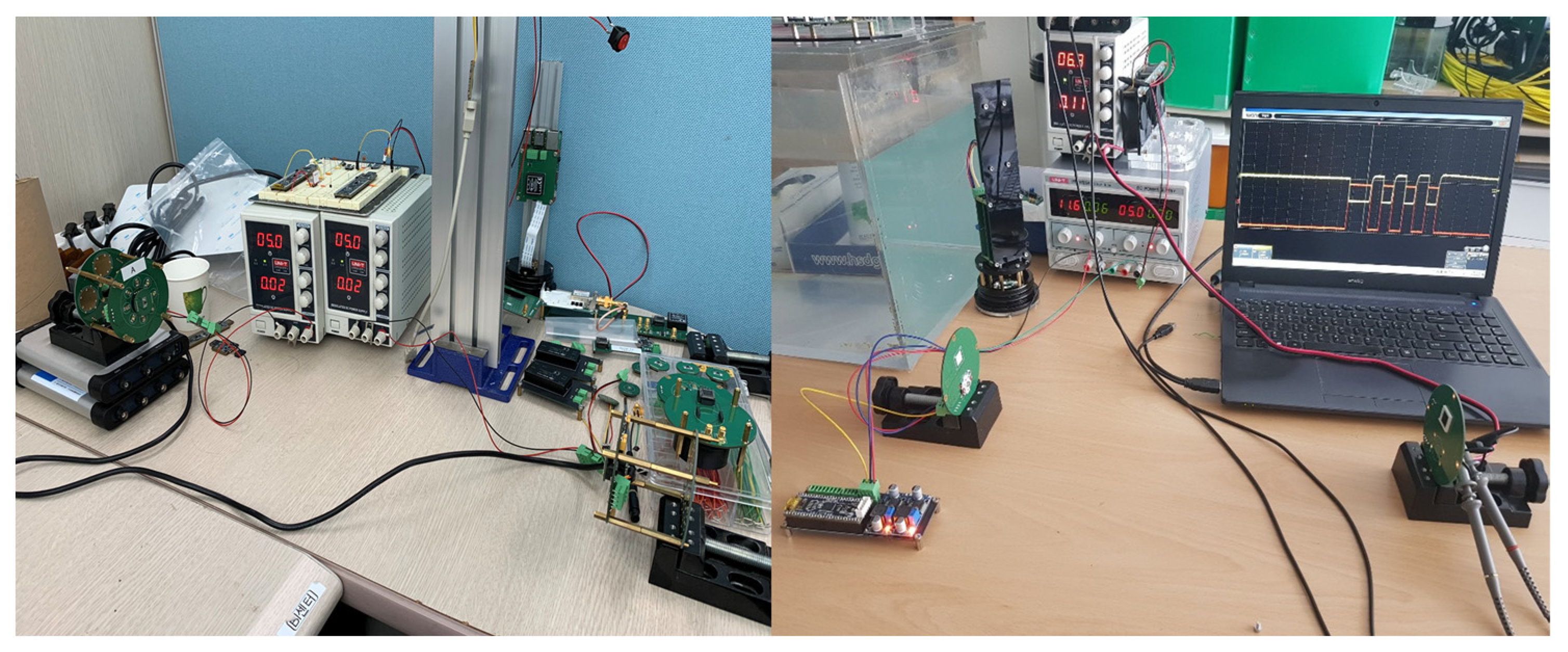
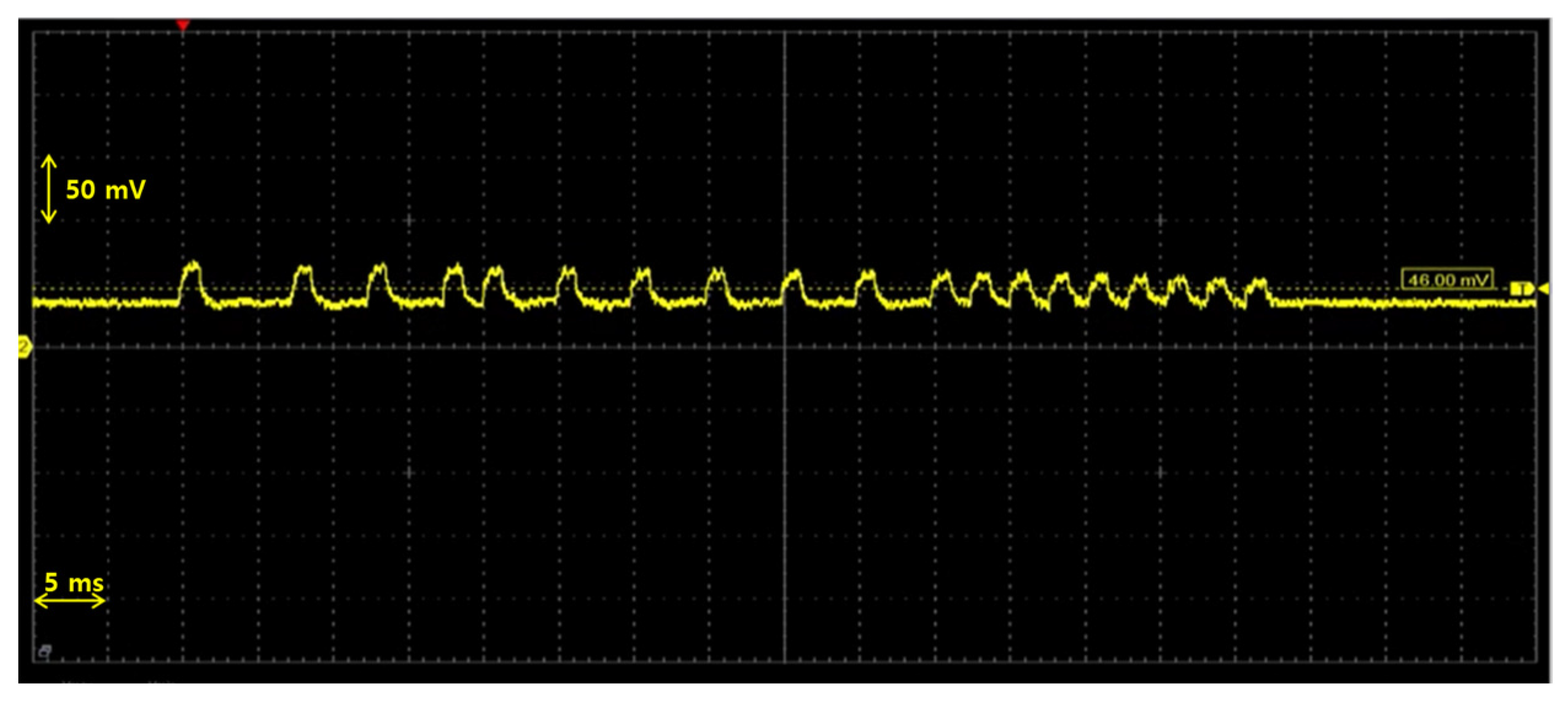
3.5. Performance Test of UWOC System
4. Attitude Control Experiments
4.1. UWOC Experiments
4.2. Communication Speed Experiment
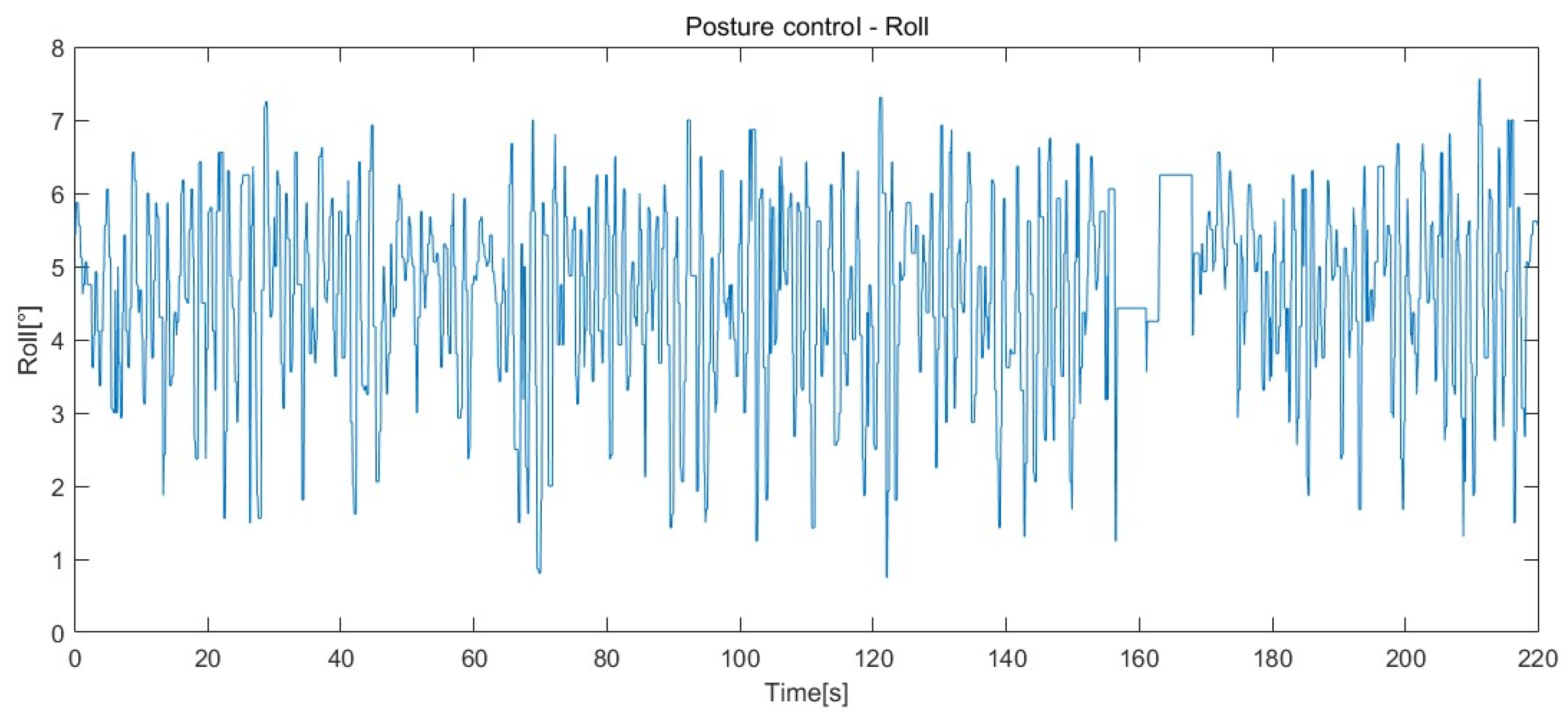
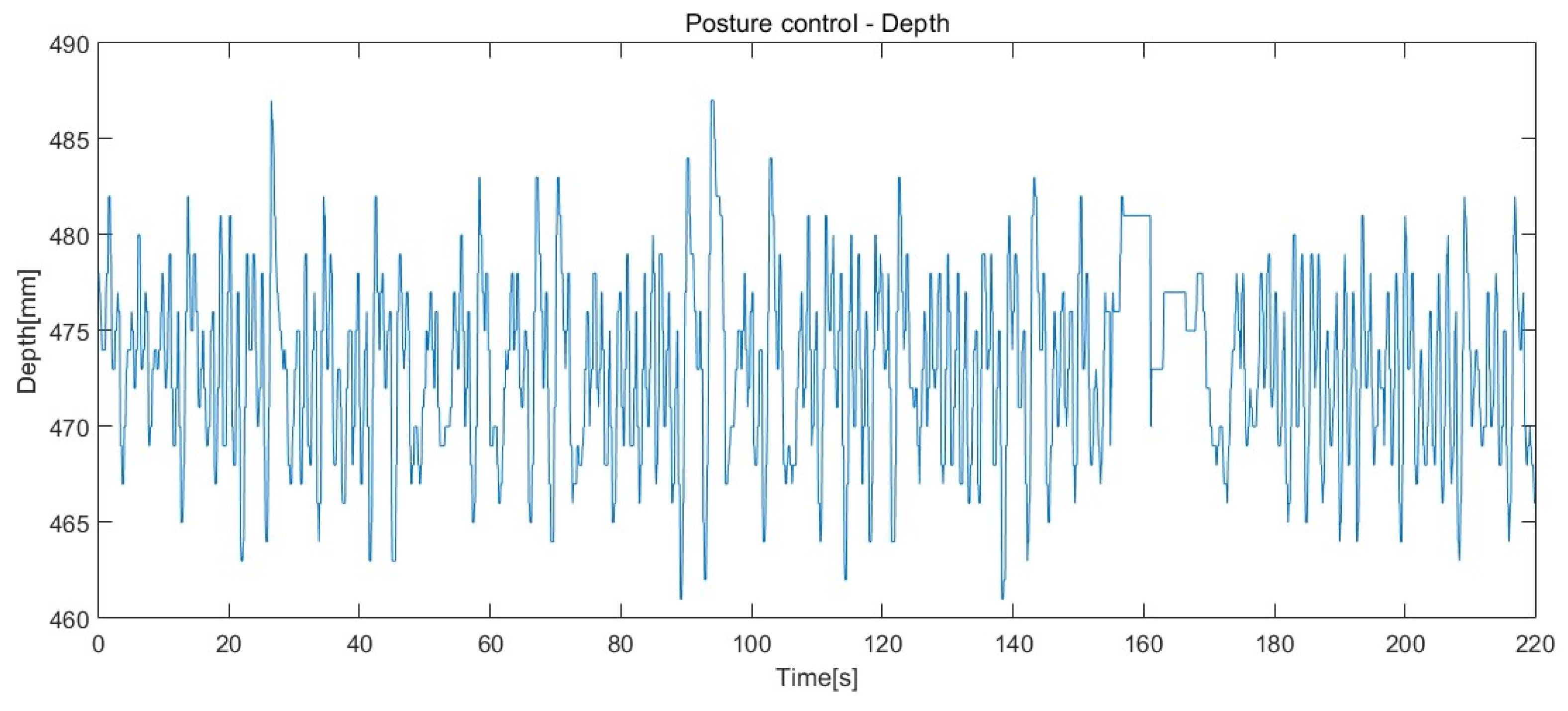
4.3. Posture Control Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qu, Z.; Lai, M. A Review on Electromagnetic, Acoustic, and New Emerging Technologies for Submarine Communication. IEEE Access 2024, 12, 12110–12125. [Google Scholar] [CrossRef]
- Ali, A.M.; Mohideen, S.; Vedachalam, N. Current status of underwater wireless communication techniques: A Review. In Proceedings of the 2022 Second International Conference on Advances in Electrical, Computing, Communication and Sustainable Technologies (ICAECT), Bhilai, India, 21–22 April 2022. [Google Scholar]
- Lurton, X. An Introduction to Underwater Acoustics: Principles and Applications; Springer Science & Business Media: Chichester, UK, 2002. [Google Scholar]
- Mahmud, M.; Islam, M.S.; Ahmed, A.; Younis, M.; Choa, F.-S. Cross-Medium Photoacoustic Communications: Challenges, and State of the Art. Sensors 2022, 22, 4224. [Google Scholar] [CrossRef] [PubMed]
- Sun, Z.; Jiang, J.; Li, Y.; Wang, X.; Li, C.; Li, Z.; Miao, Y.; Fu, X.; Duan, F. Bio-inspired covert active sonar detection method based on the encoding of sperm whale clicks. IEEE Sens. J. 2022, 22, 1449–1460. [Google Scholar] [CrossRef]
- Kumari, M.; Sharma, N.; Chauhan, R.; Joshi, K. Impact of Diverse Turbulene Conditions on Spatial-UWOC system. In Proceedings of the 2024 3rd International Conference for Advancement in Technology (ICONAT), Goa, India, 6–8 September 2024. [Google Scholar]
- Farr, N.; Bowen, A.; Ware, J.; Pontbriand, C.; Tivey, M. An Integrated, Underwater Optical/Acoustic Communications System. In Proceedings of the OCEANS’10 IEEE Sydney, Sydney, NSW, Australia, 24–27 May 2010. [Google Scholar]
- Doniec, M.; Detweiler, C.; Vasilescu, I.; Rus, D. Using Optical Communication for Remote Underwater Robot Operation. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Rajan, V.; Nagendran, A.; Dehghani-Sanij, A.; Richardson, R. Tether Monitoring for Entanglement Detection, Disentanglement and Localisation of Autonomous Robots. Robotica 2016, 34, 527–548. [Google Scholar] [CrossRef]
- Ali, F.M.; Jayakody, D.N.K.; Li, Y. Recent trends in underwater visible light communication (UVLC) systems. IEEE Access 2022, 10, 22169–22225. [Google Scholar] [CrossRef]
- Al-Halafi, A.; Oubei, H.M.; Ooi, B.S.; Shihada, B. Real-Time Video Transmission Over Different Underwater Wireless Optical Channels Using a Directly Modulated 520 nm Laser Diode. J. Opt. Commun. Netw. 2017, 9, 826–832. [Google Scholar] [CrossRef]
- Sajmath, P.K.; Renjith, V.; Ravi, A.M.K. Underwater Wireless Optical Communication Systems: A Survey. In Proceedings of the 2020 7th International Conference on Smart Structures and Systems (ICSSS), Chennai, India, 23–24 July 2020. [Google Scholar]
- Han, X.; Li, P.; Li, G.; Chang, C.; Jia, S.; Xie, Z.; Liao, P.; Nie, W.; Xie, X. Demonstration of 12.5 Mslot/s 32-PPM Underwater Wireless Optical Communication System with 0.34 Photons/Bit Receiver Sensitivity. Photonics 2023, 10, 451. [Google Scholar] [CrossRef]
- Anguita, D.; Brizzolara, D.; Parodi, G.; Hu, Q. Optical Wireless Underwater Communication for AUV: Preliminary Simulation and Experimental Results. In Proceedings of the OCEANS 2011 IEEE—Spain, Santander, Spain, 6–9 June 2011. [Google Scholar]
- Góis, P.; Sreekantaswamy, N.; Basavaraju, N.; Rufino, M.; Sebastião, L.; Botelho, J.; Gomes, J.; Pascoal, A. Development and Validation of Blue Ray, an Optical Modem for the MEDUSA Class AUVs. In Proceedings of 2016 IEEE Third Underwater Communications and Networking Conference (UComms), Lerici, Italy, 30 August–1 September 2016. [Google Scholar]
- Pontbriand, C.; Farr, N.; Hansen, J.; Kinsey, C.J.; Pelletier, L.; Ware, J.; Fourie, D. Wireless Data Harvesting Using the AUV Sentry and WHOI Optical Modem. In Proceedings of the OCEANS 2015—MTS/IEEE Washington, Washington, DC, USA, 10–22 October 2015. [Google Scholar]
- McRaven, C.; Pelletier, L.; Ware, J.; Gardner, A.; Farr, N.; Collins, J.; Purcell, M. Wireless Retrieval of High-Rate Ocean Bottom Seismograph Data and Time Synchronization Using the WHOI Optical Modem and REMUS AUV. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019. [Google Scholar]
- Son, H.-J.; Choi, H.-S.; Kang, J.-I.; Sur, J.-N.; Jeong, S.-H.; Kim, J.-Y. Underwater Guidance System for AUV Using Optical Sensor Array. J. Adv. Navig. Technol. 2019, 23, 125–133. [Google Scholar]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons: New York, NY, USA, 1994. [Google Scholar]
- Maram, R.; Azaña, J. Bit-Rate-Transparent Optical Return-to-Zero-to-Nonreturn-to-Zero Format Conversion Based on Linear Spectral Phase Filtering of the RZ Signal. Opt. Lett. 2017, 42, 5058–5061. [Google Scholar] [CrossRef] [PubMed]
- Krishna, G.; Mathew, J.; Santhanakrishnan, T.; Gupta, S. Experimental Demonstration of Hybrid LED-LD Based UOWC Link. In Proceedings of the 2023 International Conference on Microwave, Optical, and Communication Engineering (ICMOCE), Bhubaneswar, India, 26–28 May 2023. [Google Scholar]
- Sabitu, R.I.; Amin, M. Optimized NRZ/RZ-Ook over a 2-Channel Mode-Division Multiplexing for Interconnect and Metro Applications. In Proceedings of the 2022 31st Wireless and Optical Communications Conference (WOCC), Shenzhen, China, 11–12 August 2022. [Google Scholar]
- Sui, M.; Yu, X.; Zhang, F. The Evaluation of Modulation Techniques for Underwater Wireless Optical Communications. In Proceedings of the 2009 International Conference on Communication Software and Networks, Chengdu, China, 27–28 February 2009. [Google Scholar]
- Palaić, D.; Lopac, N.; Jurdana, I.; Brdar, D. Advancements and Challenges in Underwater Wireless Optical Communication in the Marine Environment. In Proceedings of the 2024 47th MIPRO ICT and Electronics Convention (MIPRO), Opatija, Croatia, 20–24 May 2024. [Google Scholar]
- Lopac, N.; Jurdana, I.; Brnelić, A.; Krljan, T. Application of Laser Systems for Detection and Ranging in the Modern Road Transportation and Maritime Sector. Sensors 2022, 22, 5946. [Google Scholar] [CrossRef] [PubMed]
- Zou, C.; Yang, F.; Song, J.; Han, Z. Underwater wireless optical communication with one-bit quantization: A hybrid autoencoder and generative adversarial network approach. IEEE Trans. Wirel. Commun. 2023, 22, 6432–6444. [Google Scholar] [CrossRef]
- Abd, M.N.; Ali, M.A.A.; Mohammed, N.J. Investigation of hybrid LD/LED system for UWOC link with depth variations. J. Opt. Commun. 2025, 1, 125–134. [Google Scholar] [CrossRef]
- Lelle, R.; Kulkarni, N.M.; Shaligram, A.D. Enhanced NTU by Modified Turbidity Sensor. In Proceedings of 2024 8th International Conference on Computing, Communication, Control and Automation (ICCUBEA), Pune, India, 23–24 August 2024. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Size | 400 × 320 × 290 mm |
| Weight | 7.7 kg |
| Number of Thrusters | 4 |
| Camera | RPI 8MP Camera Board |
| Power of LED communication system | 5 W |
| Housing Material | Acryl |
| Water Quality | Absorption Coefficient [m−1] | Scattering Coefficient [m−1] |
|---|---|---|
| Pure Seawater | 0.0405 | 0.0025 |
| Ocean | 0.114 | 0.037 |
| Coast | 0.179 | 0.219 |
| Harbor | 0.266 | 1.824 |
| Parameter | Value |
|---|---|
| Color | Green |
| Luminous Flux | 500 Lm |
| Current | 1.4 A |
| Voltage | 3.05 V |
| Dimension | 3.09 × 3.65 mm |
| Parameter | Mean Value of Sensor Data | Average RMSE |
|---|---|---|
| Roll (°) | 4.63 | 4.82 |
| Pitch (°) | 2.3 | 2.49 |
| Depth (mm) | 472.98 | 1.99 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, D.; Zhang, R.; Cho, H.; Ji, D.; Kim, S.; Choi, H. Control and Real-Time Monitoring of Autonomous Underwater Vehicle Through Underwater Wireless Optical Communication. Appl. Sci. 2025, 15, 5910. https://doi.org/10.3390/app15115910
Jung D, Zhang R, Cho H, Ji D, Kim S, Choi H. Control and Real-Time Monitoring of Autonomous Underwater Vehicle Through Underwater Wireless Optical Communication. Applied Sciences. 2025; 15(11):5910. https://doi.org/10.3390/app15115910
Chicago/Turabian StyleJung, Dongwook, Rouchen Zhang, Hyunjoon Cho, Daehyeong Ji, Seunghyen Kim, and Hyeungsik Choi. 2025. "Control and Real-Time Monitoring of Autonomous Underwater Vehicle Through Underwater Wireless Optical Communication" Applied Sciences 15, no. 11: 5910. https://doi.org/10.3390/app15115910
APA StyleJung, D., Zhang, R., Cho, H., Ji, D., Kim, S., & Choi, H. (2025). Control and Real-Time Monitoring of Autonomous Underwater Vehicle Through Underwater Wireless Optical Communication. Applied Sciences, 15(11), 5910. https://doi.org/10.3390/app15115910