Shoulder–Elbow Joint Angle Prediction Using COANN with Multi-Source Information Integration


Abstract
1. Introduction
2. COANN Network Optimization Algorithm Architecture
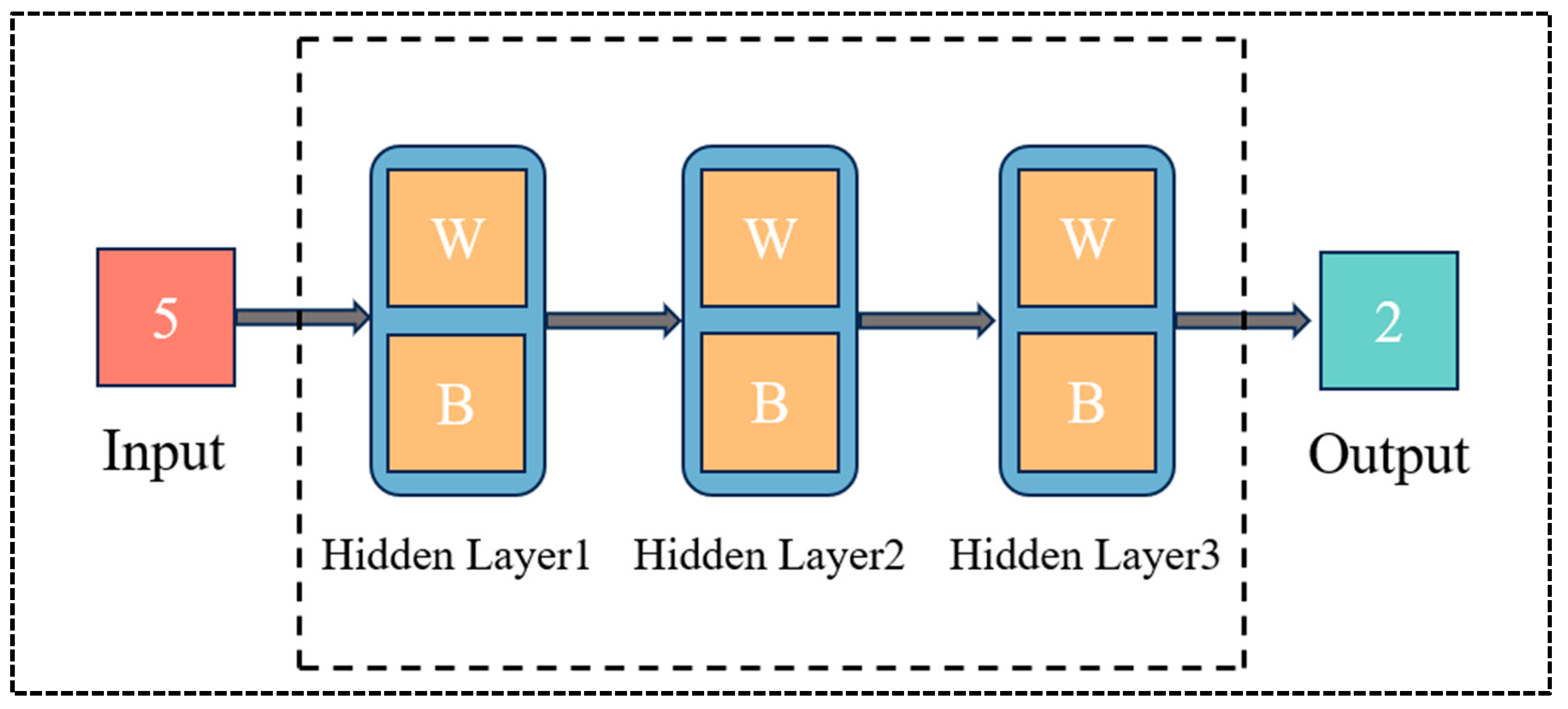
2.1. Basic Neural Network Model
2.2. Cheetah Optimization Algorithm (COA)
2.3. COANN Network Optimization Algorithm
| Algorithm 1 COANN Pseudo-Code (Python) |
| n, T = 30, 50# population size 30, 50 iterations d, hidden, out = 5, [8,6,4], 2 # Input 5 nodes, Hidden layer 8→6→4, Output 2 nodes LB, UB = −1.0, 1.0 # Weighting range [−1, 1] # Initialize the population population = [ [np.random.uniform(LB, UB, (d, hidden[0])), np.random.uniform(LB, UB, (hidden[0], hidden[1])), np.random.uniform(LB, UB, (hidden[1], hidden[2])), np.random.uniform(LB, UB, (hidden[2], out))] for _ in range(n) ] W_best, best_fitness = None, float(‘inf’) for t in range(T): for i in range(n): # Forward propagation to compute RMSE h1 = sigmoid(input_data @ population[i][0]) h2 = sigmoid(h1 @ population[i][1]) predict = sigmoid(h2 @ population[i][2]) @ population[i][3] RMSE = np.sqrt(mean((true_angles − predict)**2)) fitness = 1/(1 + RMSE) # Updating the global optimum if fitness > best_fitness: W_best, best_fitness = population[i], fitness # Updating weights in stages for i in range(n): if t < 0.3*T: # global search α = 0.1*(UB − LB)*(1 − t/T) new_weights = [W + α*np.random.randn(*W.shape) for W in population[i]] elif t < 0.7*T: # local ambush decay = np.exp(−t/T) new_weights = [W*decay + 0.1*(W_best_l − W) for W, W_best_l in zip(population[i], W_best)] else: # convergence attack β = 0.05*(UB − LB) new_weights = [W_best_l + β*np.random.randn(*W_best_l.shape) for W_best_l in W_best] population[i] = [np.clip(W, LB, UB) for W in new_weights] # Final projections final_predict = sigmoid(sigmoid(sigmoid(new_input@W_best[0])@W_best[1])@W_best[2])@W_best[3] |
3. Experimental Program Flow Design
3.1. Pre-Experiment Preparation
3.2. Subject (Of an Experiment)
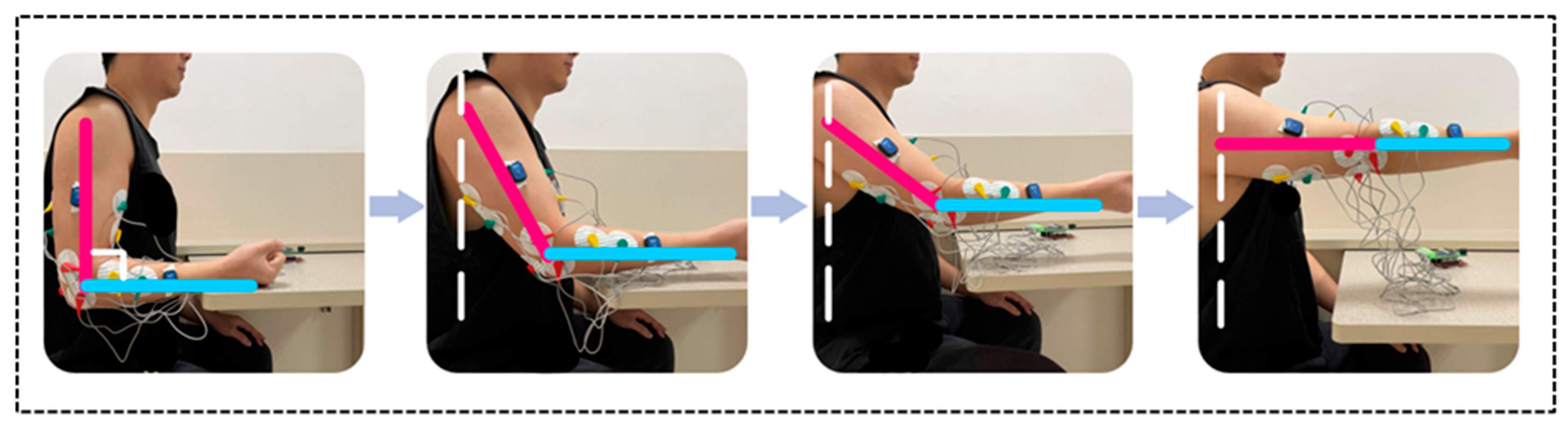
3.3. Data Acquisition
4. Acquisition and Processing of Multi-Information Fusion Signals
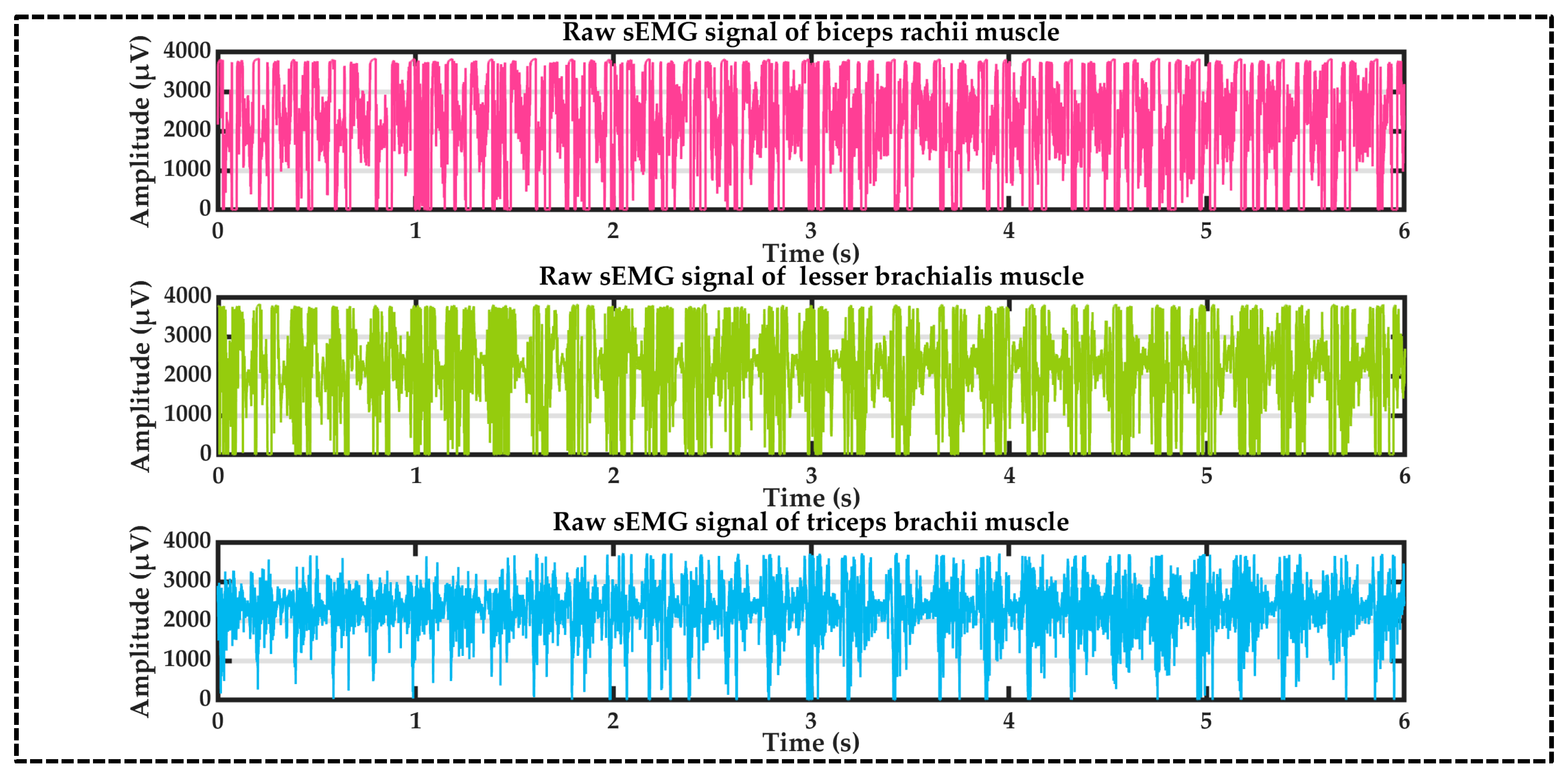
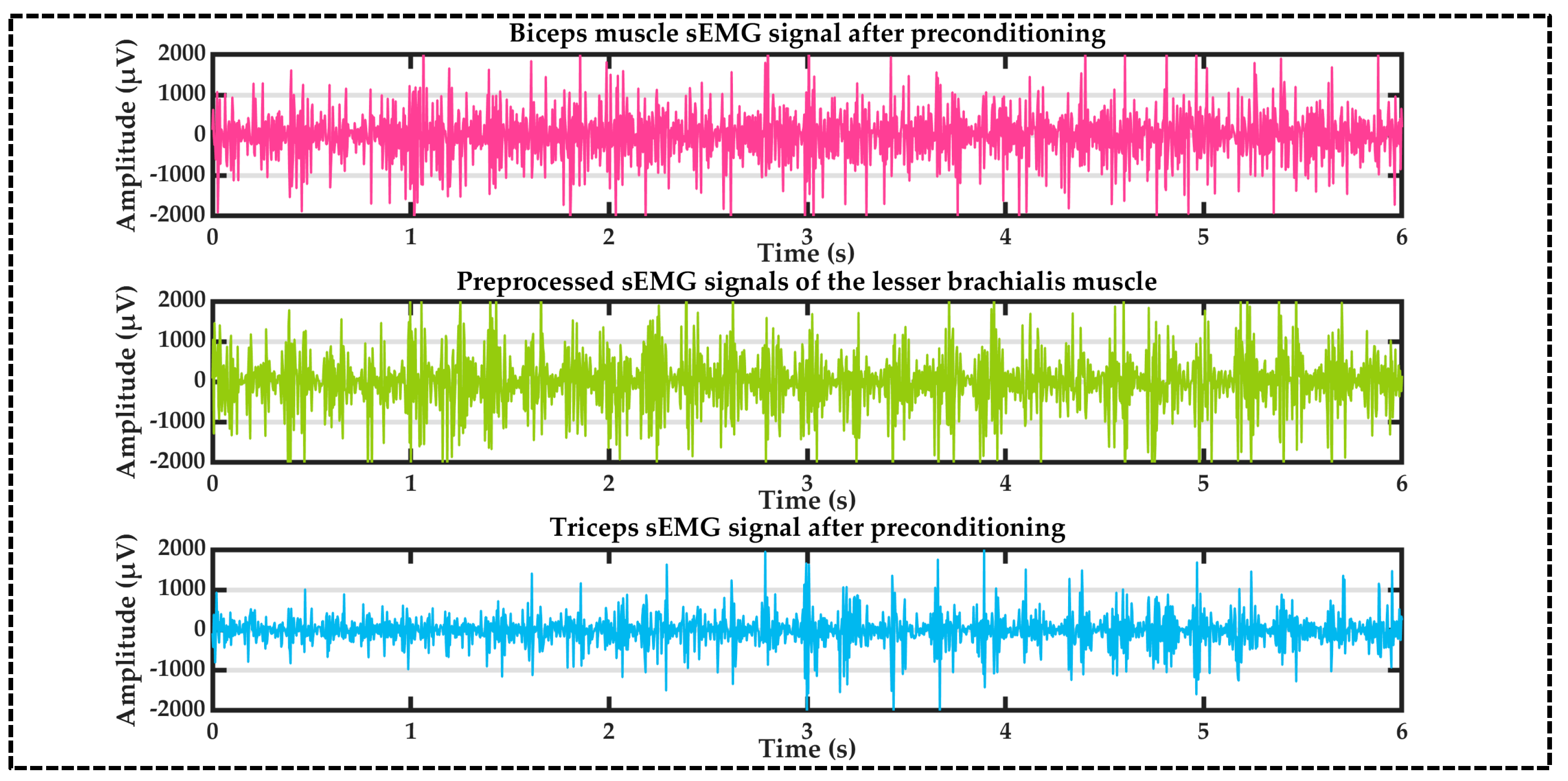
4.1. Surface EMG Signal Acquisition and Processing
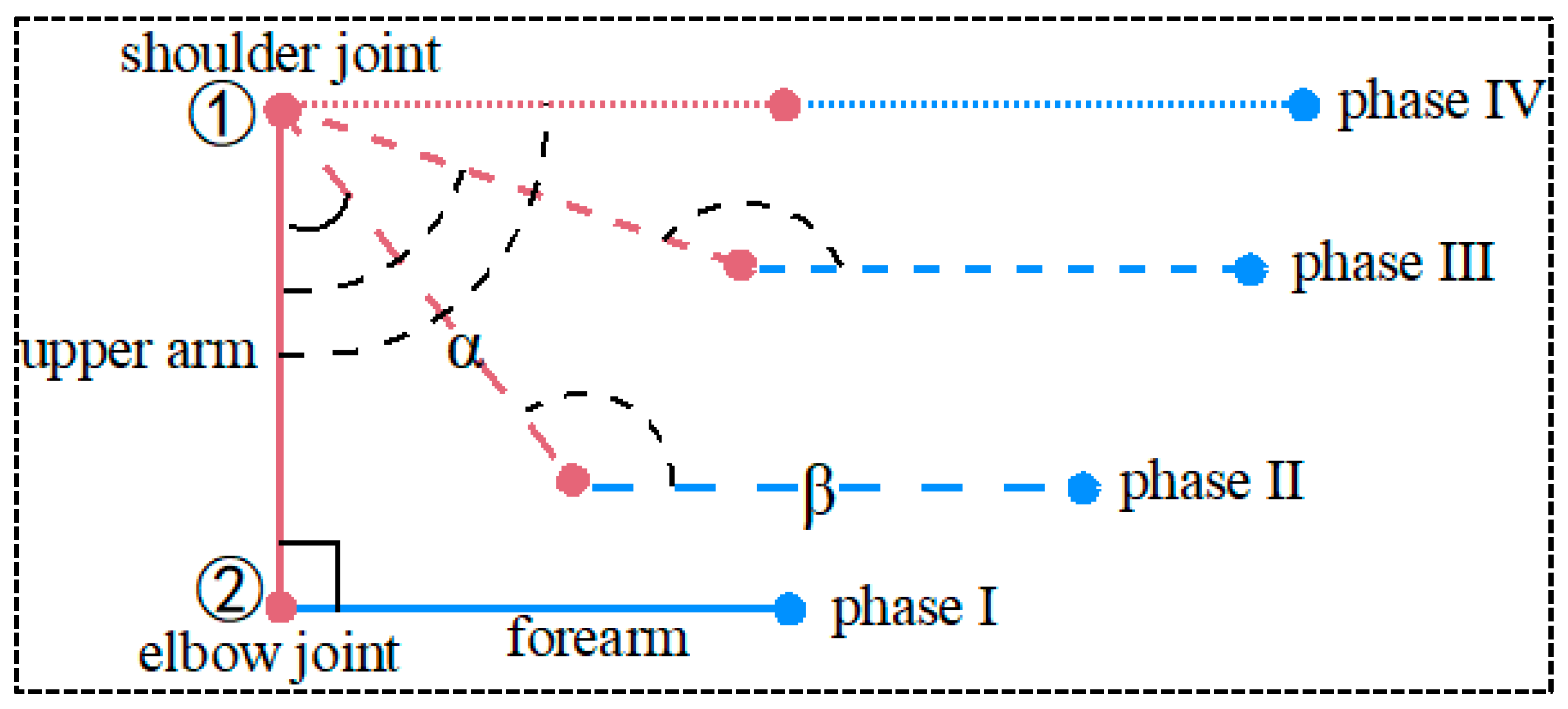
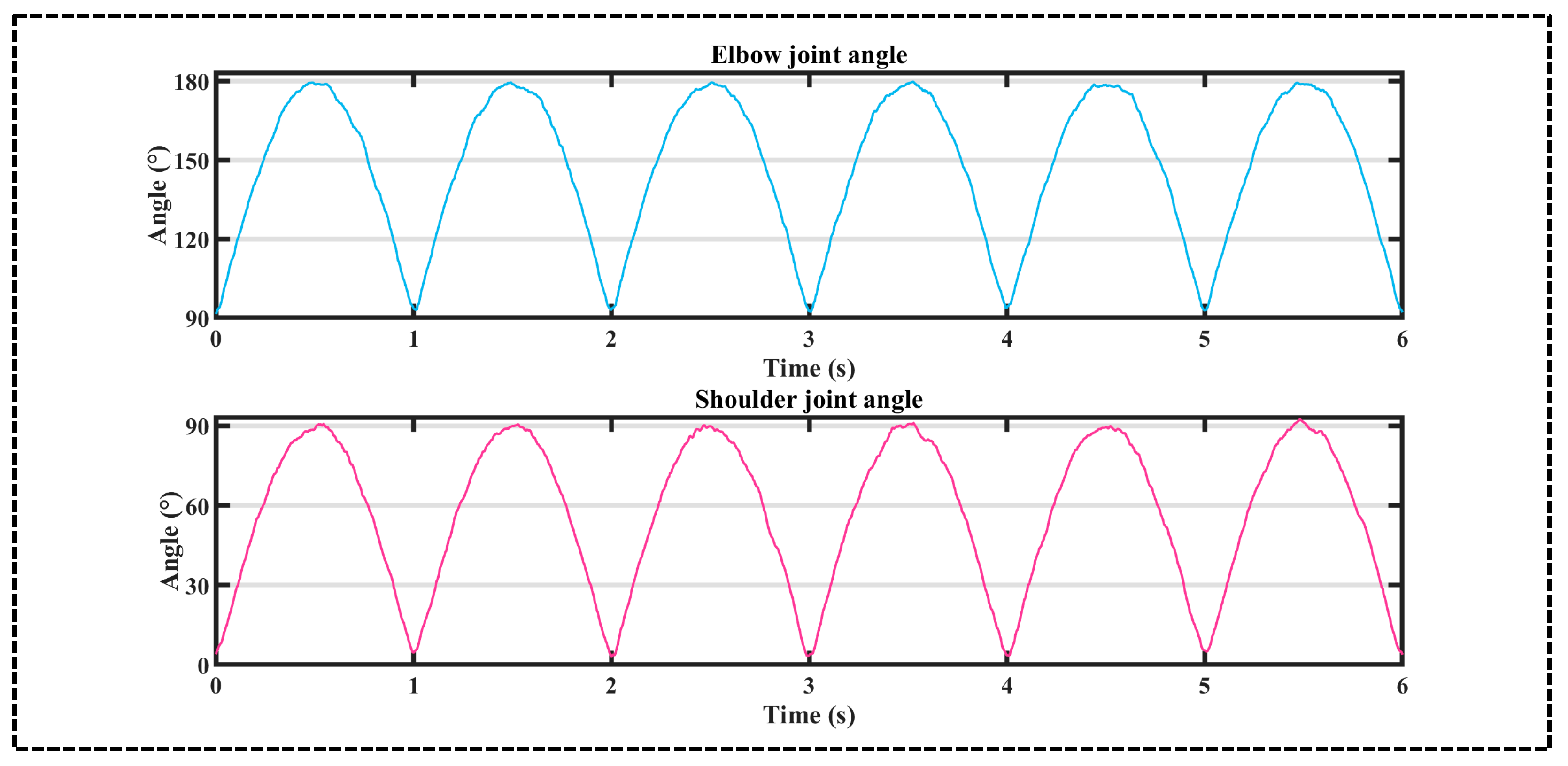
4.2. Acquisition and Processing of Shoulder and Elbow Joint Angle Signals
5. Test Procedure and Analysis
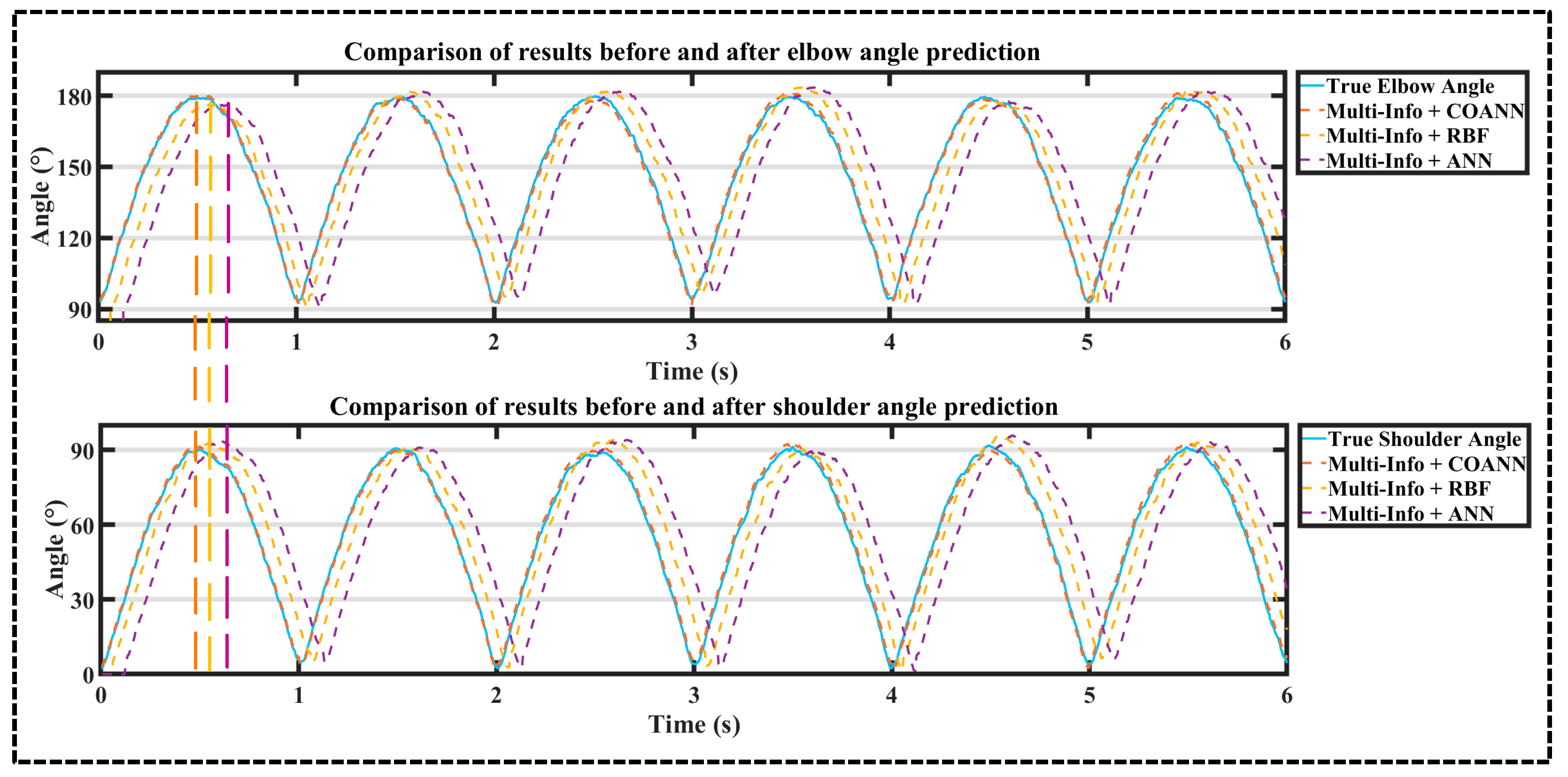
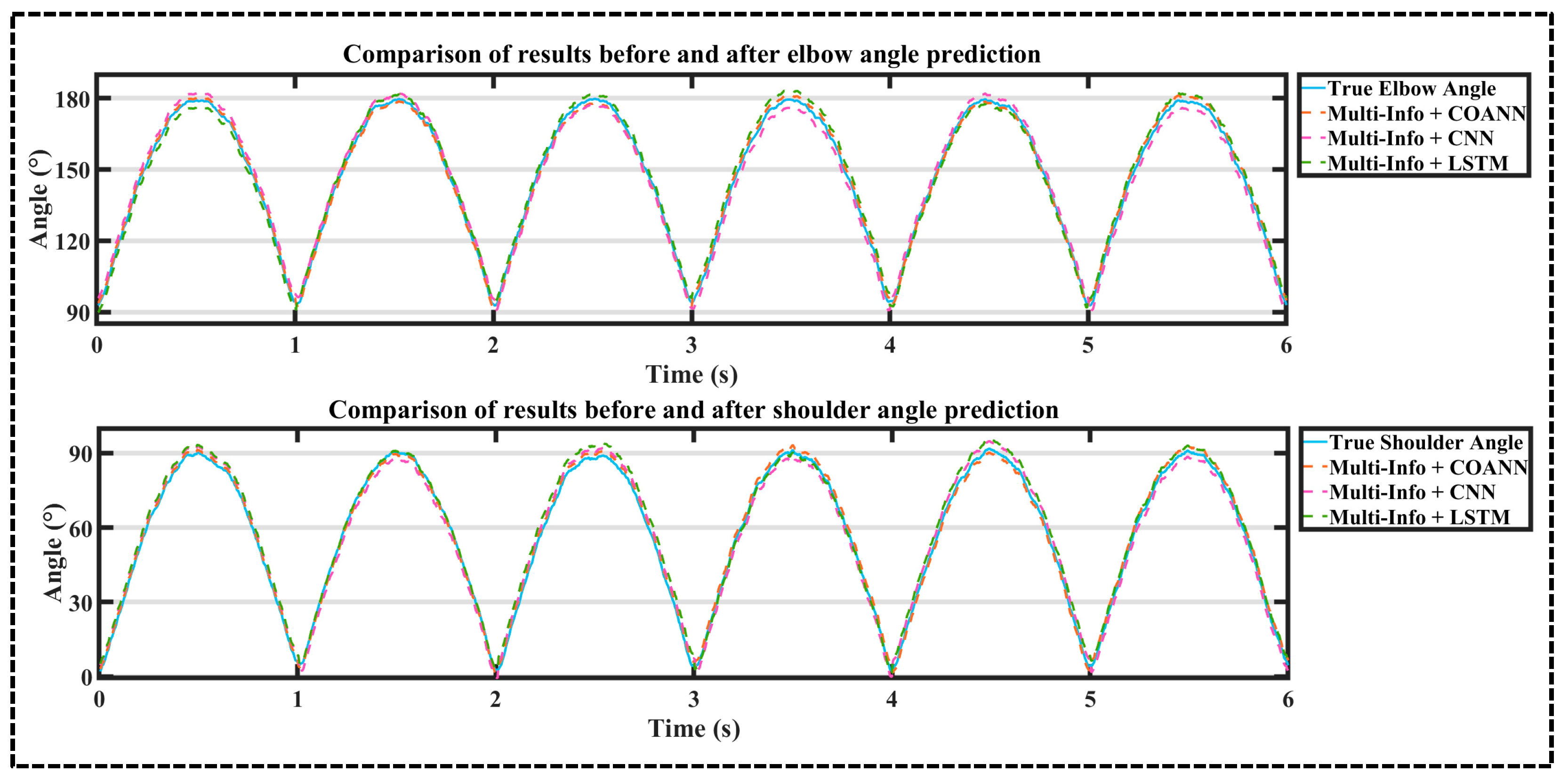
5.1. Comparison of Prediction Effectiveness of Algorithms Under Multi-Information Fusion Inputs
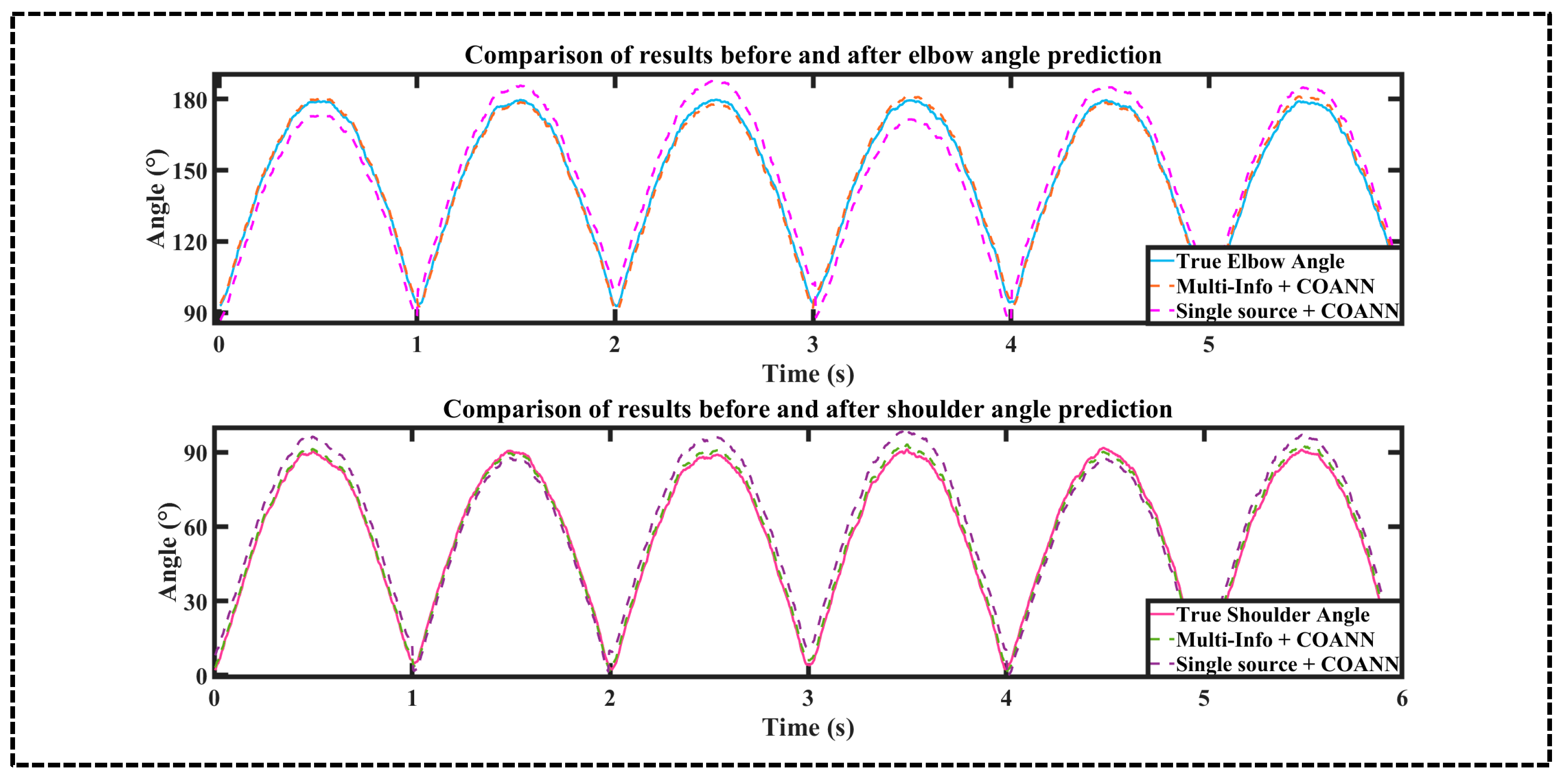
5.2. Comparison of Recognition Effect of Multi-Information Sources and Single Information Sources Under COANN Algorithm
6. Summary
7. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kong, D.Z.; Wang, W.D.; Guo, D.; Shi, Y.K. Research on the prediction method of upper extremity joint angle based on sEMG. J. Northwest. Polytech. Univ. 2022, 40, 764–770. [Google Scholar] [CrossRef]
- Zhao, Z.H.; Zhang, X.S.; Guo, Y.; Xu, Z.K.; Cao, R.H. Joint angle prediction model based on surface EMG signals. J. Taiyuan Univ. Technol. 2025, 1–9. [Google Scholar] [CrossRef]
- Liu, K.P.; Sun, R.L.; Chai, Y.Y.; Sun, Z.B. Upper extremity joint angle prediction based on generalized regression neural network. Sci. Technol. Eng. 2021, 21, 7187–7192. [Google Scholar]
- Bai, Z.H.; Xiang, Z.; Tan, Z.Y.; Pei, H.N. Adaptive neuro-fuzzy inference system optimized for rapid upper limb assessment. Comput. Integr. Manuf. Syst. 2024, 30, 1643–1656. [Google Scholar] [CrossRef]
- Wang, W.M. Prediction of lower limb joint angles by electromyographic signals based on VMD-ELMAN. Comput. Sci. 2024, 51, 257–264. [Google Scholar]
- Han, Y.L.; Tao, Q.; Zhang, X.D.; Chen, Q.Z. An electromyographic prediction method for human lower limb multi-joint continuous motion. Mach. Tools Hydraul. 2023, 51, 112–119. [Google Scholar]
- Rabe, K.G.; Lenzi, T.; Fey, N.P. Performance of Sonomyographic and Electromyographic Sensing for Continuous Estimation of Joint Torque During Ambulation on Multiple Terrains. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 2635–2644. [Google Scholar] [CrossRef]
- Angelidou, C.; Artemiadis, P. On Predicting Transitions to Compliant Surfaces in Human Gait via Neural and Kinematic Signals. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 2214–2223. [Google Scholar] [CrossRef]
- Morbidoni, C.; Cucchiarelli, A.; Agostini, V.; Knaflitz, M.; Fioretti, S.; Di Nardo, F. Machine-Learning-Based Prediction of Gait Events From EMG in Cerebral Palsy Children. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 819–830. [Google Scholar] [CrossRef]
- Khorram, A.; Lin, H.; Peng, W. A Novel SFDN+DNN Approach for Efficient Hand Movement Recognition Using Surface Electromyography Signals. Eng. Proc. 2024, 76, 52. [Google Scholar] [CrossRef]
- Akbari, M.A.; Zare, M.; Azizipanah-abarghooee, R.; Mirjalili, S.; Deriche, M. The cheetah optimizer: A nature-inspired metaheuristic algorithm for large-scale optimization problems. Sci. Rep. 2022, 12, 10953. [Google Scholar] [CrossRef] [PubMed]
- Memon, Z.A.; Akbari, M.A.; Zare, M. An Improved Cheetah Optimizer for Accurate and Reliable Estimation of Unknown Parameters in Photovoltaic Cell and Module Models. Appl. Sci. 2023, 13, 9997. [Google Scholar] [CrossRef]
- Sait, S.M.; Mehta, P.; Gürses, D.; Yildiz, A.R. Cheetah optimization algorithm for optimum design of heat exchangers. Mater. Test. 2023, 65, 1230–1236. [Google Scholar] [CrossRef]
- Qiao, Y.Y.; Wang, J.Y.; Li, H.; Wang, Z. Research on vehicle PMSM control strategy optimized by cheetah algorithm. J. Chongqing Univ. Technol. (Nat. Sci.) 2024, 38, 48–54. [Google Scholar]
- GB/T 17626.3-2016; Electromagnetic Compatibility—Testing and Measurement Techniques—Radiated, Radio-Frequency, Electromagnetic Field Immunity Test. Standards Administration of China: Beijing, China, 2016.
- Wit Motion Shenzhen Co., Ltd. WT9011DCL-BT5.0 Bluetooth 5.0 Accelerometer Inclinometer Datasheet (v23-0608). 2023. Available online: https://www.wit-motion.com/BLE/17.html (accessed on 9 May 2025).
- Zong, S.Y.; Li, W.; Wei, X.J.; Chen, J.J.; Yue, Z.W. A Study on Lower Limb Movement Intention Recognition Based on Multi-Source Information Fusion. IEEE Access 2025, 13, 5032–5041. [Google Scholar] [CrossRef]
- Elouaham, S.; Dilou, A.; Nassiri, B.; Zougagh, H. Combination method for denoising EMG signals using EWT and EMD techniques. In Proceedings of the 2023 IEEE International Conference on Advances in Data-Driven Analytics and Intelligent Systems (ADACIS), Marrakesh, Morocco, 23–25 November 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Fratti, R.; Marini, N.; Atzori, M.; Müller, H.; Tiengo, C.; Bassetto, F. A Multi-Scale CNN for Transfer Learning in sEMG-Based Hand Gesture Recognition for Prosthetic Devices. Sensors 2024, 24, 7147. [Google Scholar] [CrossRef] [PubMed]
- Deng, F.l. Neural network based on sEMG multi-eigenvalue fusion for lower limb joint Angle prediction. Technol. Appl. 2023, 37, 16–20. [Google Scholar]
- Haufe, S.; Isaias, I.U.; Pellegrini, F.; Palmisano, C. Gait Event Prediction Using Surface Electromyography in Parkinsonian Patients. Bioengineering 2023, 10, 212. [Google Scholar] [CrossRef]
- Cai, S.B.; Chen, D.P.; Fan, B.F.; Du, M.Y.; Bao, G.J.; Li, G. Gait phases recognition based on lower limb sEMG signals using LDA-PSO-LSTM algorithm Biomed. Signal Process. Control. 2023, 80 Pt 1, 104272. [Google Scholar] [CrossRef]
- Di Nardo, F.; Morbidoni, C.; Cucchiarelli, A.; Fioretti, S. Influence of EMG-signal processing and experimental set-up on prediction of gait events by neural network Biomed. Signal Process. Control. 2021, 63, 102232. [Google Scholar] [CrossRef]
- Sampath Dakshina Murthy, A.; Karthikeyan, T.; Vinoth Kanna, R. Gait-based person fall prediction using deep learning approach. Soft Comput. 2022, 26, 12933–12941. [Google Scholar] [CrossRef]
- Wei, P.N.; Zhang, J.H.; Wang, B.Z.; Hong, J. Surface Electromyography and Electroencephalogram-Based Gait Phase Recognition and Correlations Between Cortical and Locomotor Muscle in the Seven Gait Phases. Front. Neurosci. 2021, 15, 607905. [Google Scholar] [CrossRef] [PubMed]
- Di Nardo, F.; Morbidoni, C.; Mascia, G.; Verdini, F.; Fioretti, S. Intra-subject approach for gait-event prediction by neural network interpretation of EMG signals. Biomed. Med. Eng. Online 2020, 19, 58. [Google Scholar] [CrossRef] [PubMed]
- Arshad, M.Z.; Jamsrandorj, A.; Kim, J.; Mun, K.-R. Gait Events Prediction Using Hybrid CNN-RNN-Based Deep Learning Models through a Single Waist-Worn Wearable Sensor. Sensors 2022, 22, 8226. [Google Scholar] [CrossRef]
- Wang, S.; Nguyen, T.K.; Bhatt, T. Trip-Related Fall Risk Prediction Based on Gait Pattern in Healthy Older Adults: A Machine-Learning Approach. Sensors 2023, 23, 5536. [Google Scholar] [CrossRef] [PubMed]
- Di Nardo, F.; Basili, T.; Meletani, S.; Scaradozzi, D. Wavelet-Based Assessment of the Muscle-Activation Frequency Range by EMG Analysis. IEEE Access. 2022, 10, 9793–9805. [Google Scholar] [CrossRef]
- Sharma, A.K.; Liu, S.-H.; Zhu, X.; Chen, W. Predicting Gait Parameters of Leg Movement with sEMG and Accelerometer Using Cat Boost Machine Learning. Electronics 2024, 13, 1791. [Google Scholar] [CrossRef]
- Kim, J.-K.; Bae, M.-N.; Lee, K.B.; Hong, S.G. Identification of Patients with Sarcopenia Using Gait Parameters Based on Inertial Sensors. Sensors 2021, 21, 1786. [Google Scholar] [CrossRef]
- Di Nardo, F.; Cucchiarelli, A.; Morbidoni, C.; Fioretti, S. Prediction of stride duration by neural-network interpretation of surface EMG signals. In Proceedings of the 2021 IEEE International Symposium on Medical Measurements and Applications, Lausanne, Switzerland, 23–25 June 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Chowdary, Y.S.S.M.V.; Tokala, J.R.; Sharma, A.; Sharma, S.; Sharma, V. Artificial Intelligence-based Approach for Gait Pattern Identification Using Surface Electromyography (SEMG). In Proceedings of the 2020 IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS), New Delhi, India, 14–17 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, J.; Wang, C.; He, B.; Li, P.; Wu, X. Metric Learning for Robust Gait Phase Recognition for a Lower Limb Exoskeleton Robot Based on sEMG. IEEE Trans. Med. Robot. Bionics 2022, 4, 472–479. [Google Scholar] [CrossRef]
- Arunganesh, K.; Nagarajan, G.; Sivakumaran, N.; Karthick, P.A. Recognition of Lower Limb Movements Using Machine Learning Methods and Bispectral Maps of Wireless SEMG Measurements. IEEE Sens. Lett. 2023, 7, 7004604. [Google Scholar]
- Wu, X.; Wang, P.; Wang, J.; Zhang, J.; Chen, W.; Wang, X. Prediction of Lower Limb Action Intention Based on Surface EMG Signal. In Proceedings of the 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 1–4 August 2021; pp. 1679–1684. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment No. | Gender | Height | Weight | Age | BMI |
|---|---|---|---|---|---|
| A1 | female | 164.3 | 57.8 | 26 | 21.4 |
| A2 | female | 168.4 | 62.7 | 25 | 22.1 |
| A3 | male | 178.7 | 68.2 | 25 | 21.4 |
| A4 | male | 175.2 | 73.1 | 25 | 23.8 |
| A5 | male | 183.8 | 76.7 | 26 | 22.7 |
| Elbow Joint | Shoulder Joint | |||
|---|---|---|---|---|
| RMSE | R2 | RMSE | R2 | |
| A1 | 0.003981 | 0.9959 | 0.008261 | 0.9978 |
| A2 | 0.004628 | 0.9896 | 0.012082 | 0.9895 |
| A3 | 0.003701 | 0.9998 | 0.004326 | 0.9921 |
| A4 | 0.004834 | 0.9928 | 0.009326 | 0.9822 |
| A5 | 0.006532 | 0.9993 | 0.003591 | 0.9899 |
| Elbow Joint | Shoulder Joint | |||
|---|---|---|---|---|
| RMSE | R2 | RMSE | R2 | |
| A1 | 0.017071 | 0.9169 | 0.019825 | 0.9892 |
| A2 | 0.012738 | 0.9092 | 0.042262 | 0.9075 |
| A3 | 0.099933 | 0.9312 | 0.080688 | 0.9121 |
| A4 | 0.053222 | 0.9158 | 0.057479 | 0.9531 |
| A5 | 0.054987 | 0.9736 | 0.097954 | 0.9131 |
| Elbow Joint | Shoulder Joint | |||
|---|---|---|---|---|
| RMSE | R2 | RMSE | R2 | |
| A1 | 0.093281 | 0.8937 | 0.130981 | 0.8996 |
| A2 | 0.117474 | 0.8818 | 0.190503 | 0.9108 |
| A3 | 0.018423 | 0.8764 | 0.109861 | 0.9213 |
| A4 | 0.101305 | 0.9177 | 0.123609 | 0.8956 |
| A5 | 0.087391 | 0.9116 | 0.072856 | 0.8981 |
| Elbow Joint | Shoulder Joint | |||
|---|---|---|---|---|
| RMSE | R2 | RMSE | R2 | |
| A1 | 0.017071 | 0.9169 | 0.019825 | 0.9892 |
| A2 | 0.012738 | 0.9092 | 0.042262 | 0.9075 |
| A3 | 0.099933 | 0.9312 | 0.080688 | 0.9121 |
| A4 | 0.053222 | 0.9158 | 0.057479 | 0.9531 |
| A5 | 0.054987 | 0.9736 | 0.097954 | 0.9131 |
| Elbow Joint | Shoulder Joint | |||
|---|---|---|---|---|
| RMSE | R2 | RMSE | R2 | |
| A1 | 0.093281 | 0.8937 | 0.130981 | 0.8996 |
| A2 | 0.117474 | 0.8818 | 0.190503 | 0.9108 |
| A3 | 0.018423 | 0.8764 | 0.109861 | 0.9213 |
| A4 | 0.101305 | 0.9177 | 0.123609 | 0.8956 |
| A5 | 0.087391 | 0.9116 | 0.072856 | 0.8981 |
| Elbow Joint | Shoulder Joint | |||
|---|---|---|---|---|
| RMSE | R2 | RMSE | R2 | |
| A1 | 0.005289 | 0.9937 | 0.013098 | 0.9961 |
| A2 | 0.010747 | 0.9818 | 0.005039 | 0.9308 |
| A3 | 0.018042 | 0.9764 | 0.019868 | 0.9213 |
| A4 | 0.007130 | 0.9377 | 0.013609 | 0.9725 |
| A5 | 0.017391 | 0.9916 | 0.007285 | 0.9981 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zong, S.; Li, W.; Sun, D.; Jia, Z.; Yue, Z. Shoulder–Elbow Joint Angle Prediction Using COANN with Multi-Source Information Integration. Appl. Sci. 2025, 15, 5671. https://doi.org/10.3390/app15105671
Zong S, Li W, Sun D, Jia Z, Yue Z. Shoulder–Elbow Joint Angle Prediction Using COANN with Multi-Source Information Integration. Applied Sciences. 2025; 15(10):5671. https://doi.org/10.3390/app15105671
Chicago/Turabian StyleZong, Siyu, Wei Li, Dawen Sun, Zhuoda Jia, and Zhengwei Yue. 2025. "Shoulder–Elbow Joint Angle Prediction Using COANN with Multi-Source Information Integration" Applied Sciences 15, no. 10: 5671. https://doi.org/10.3390/app15105671
APA StyleZong, S., Li, W., Sun, D., Jia, Z., & Yue, Z. (2025). Shoulder–Elbow Joint Angle Prediction Using COANN with Multi-Source Information Integration. Applied Sciences, 15(10), 5671. https://doi.org/10.3390/app15105671