Research on Fractional-Order Control of Anchor Drilling Machine Optimized by Intelligent Algorithms


Abstract
1. Introduction
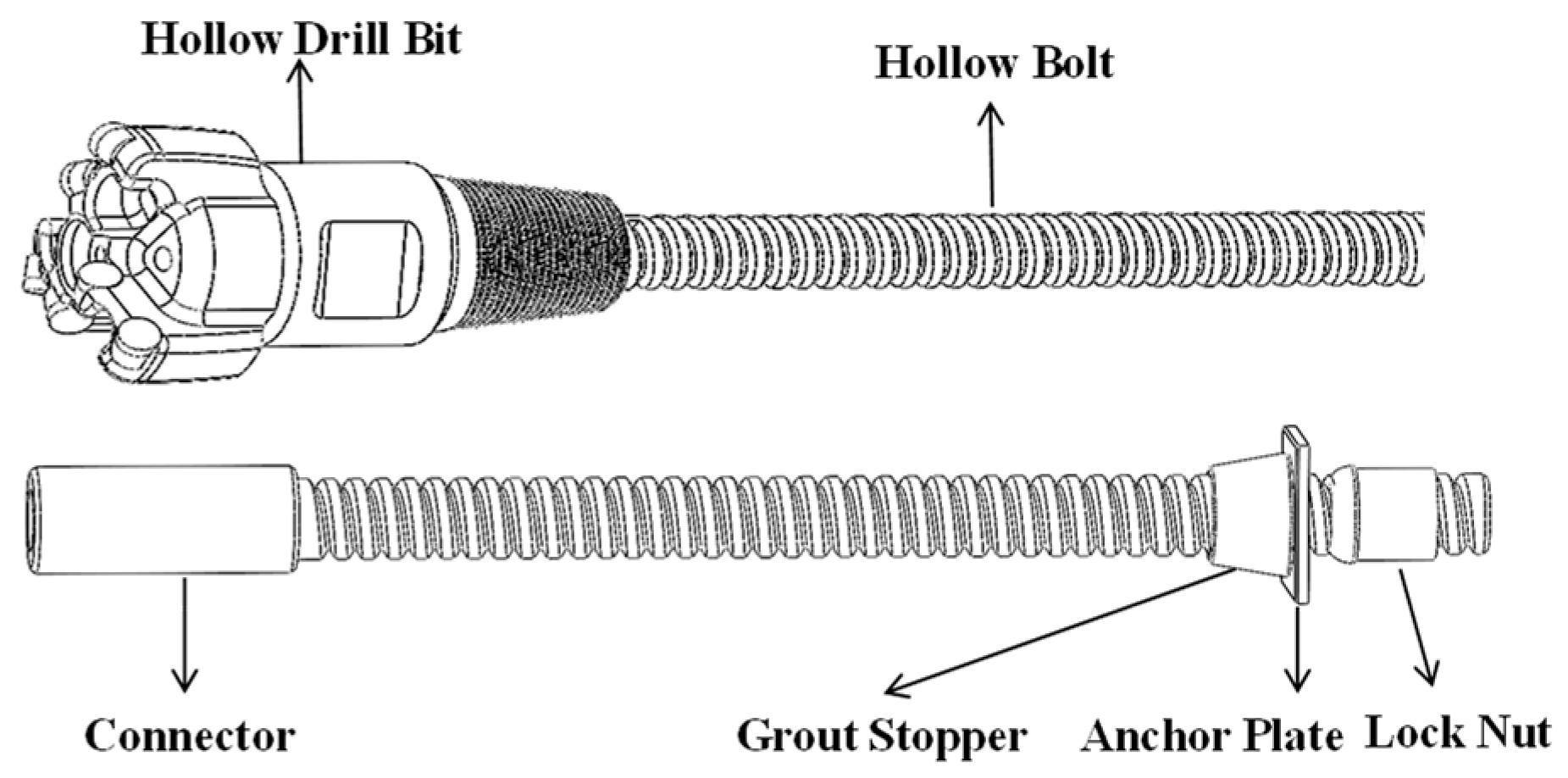
2. Drilling and Bolting Robot Rig Structure and Workflow
3. A Fractional-Order FOPID Controller Based on Intelligent Optimization Algorithms
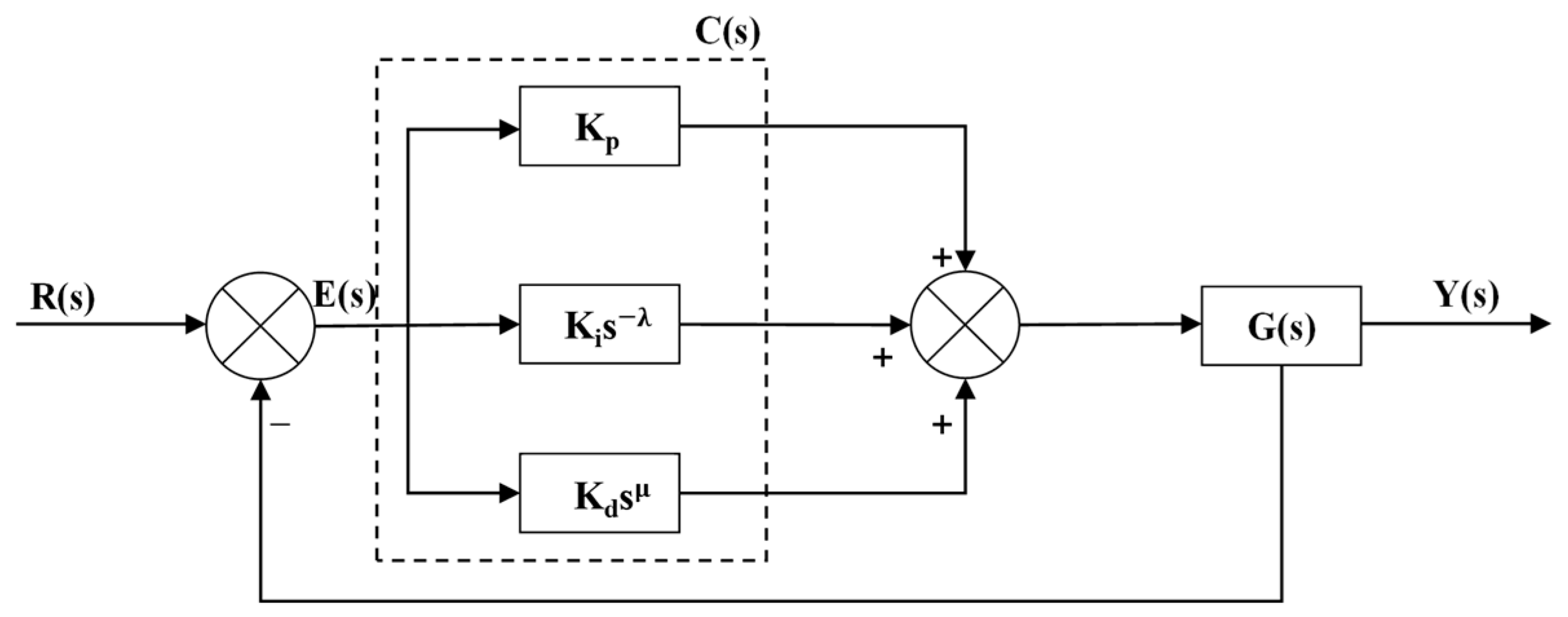
3.1. Fractional-Order Controller
3.2. Particle Swarm Optimization Algorithm Based on Improved Lévy Flight and Chaotic Mapping
4. Mathematical Modeling and Simulation Test
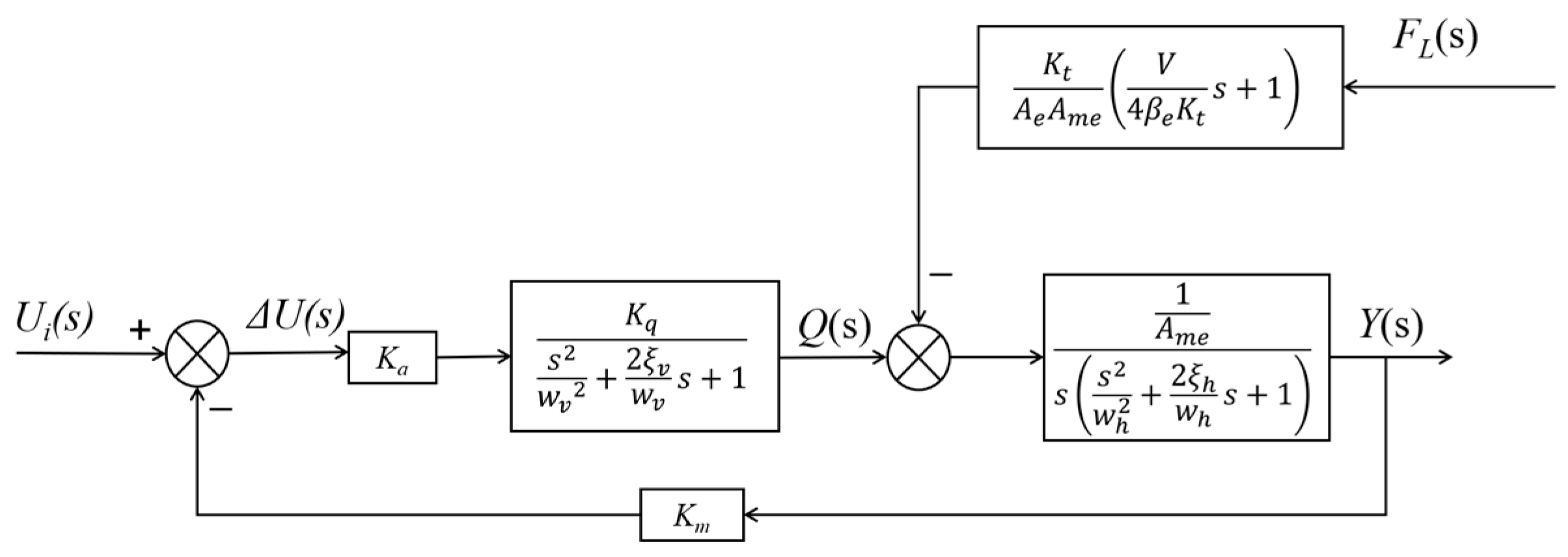
4.1. Modeling of Middle Valve-Controlled Hydraulic Cylinder
4.2. Performance Metric Function Evaluation
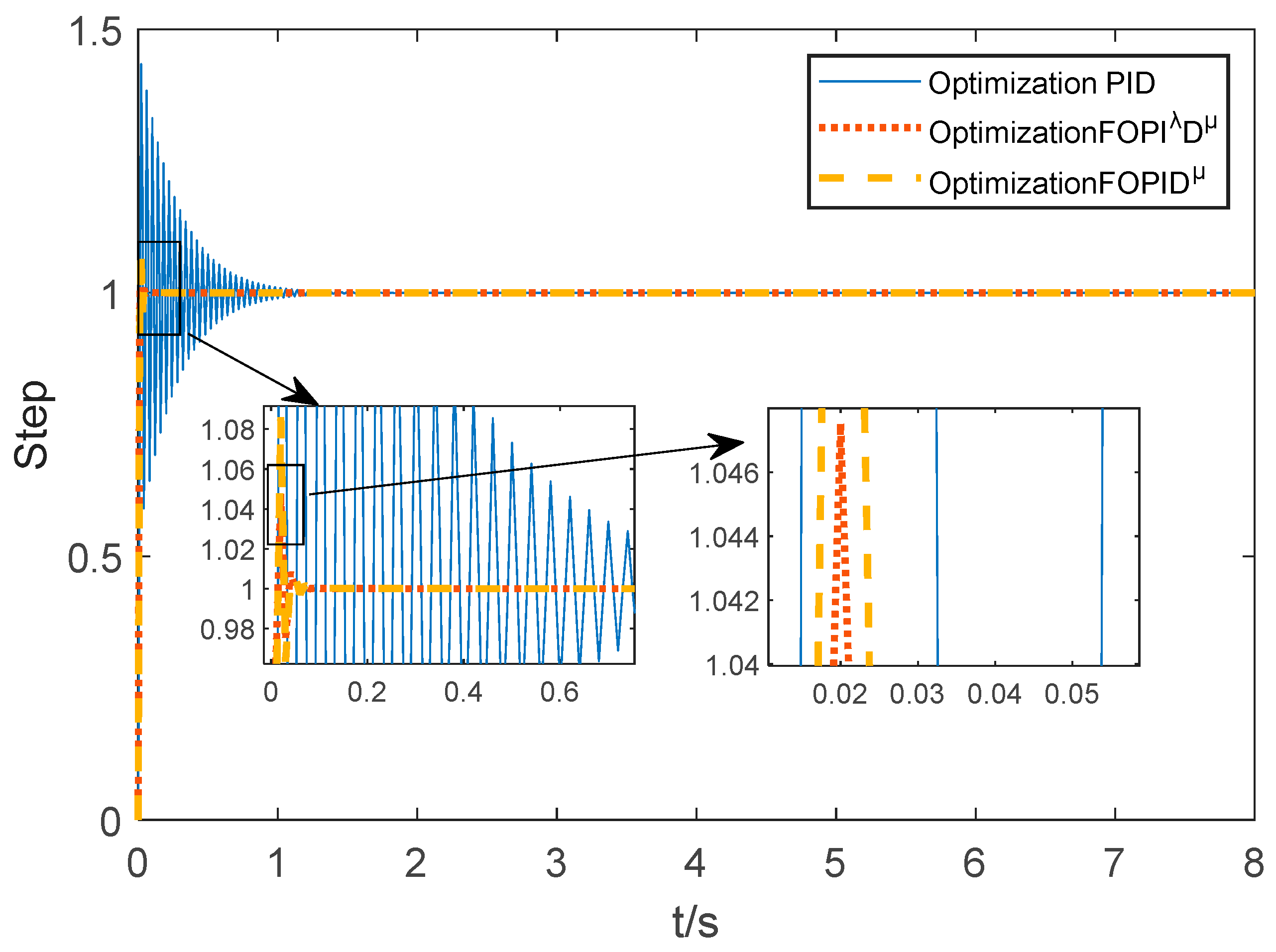
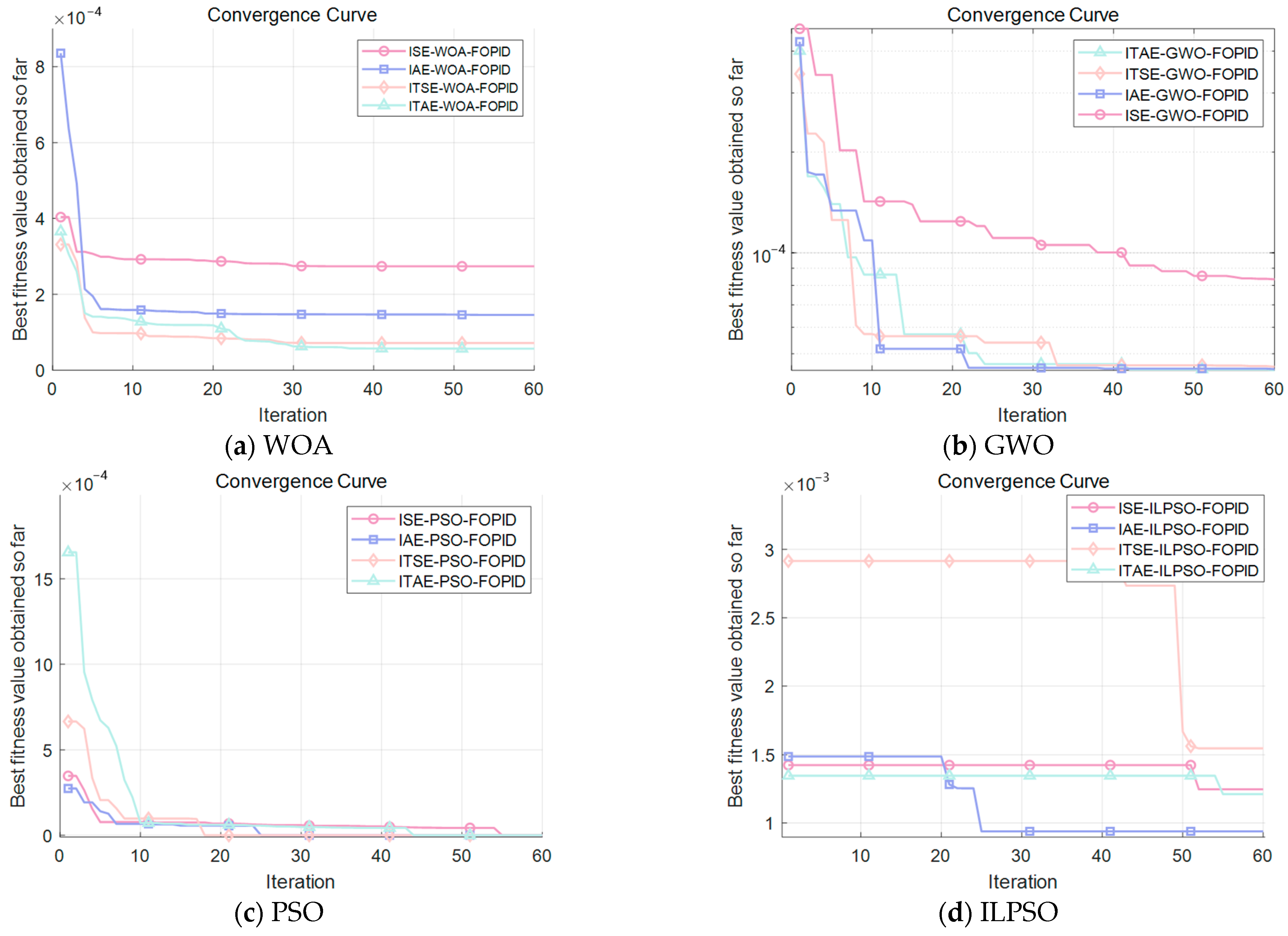
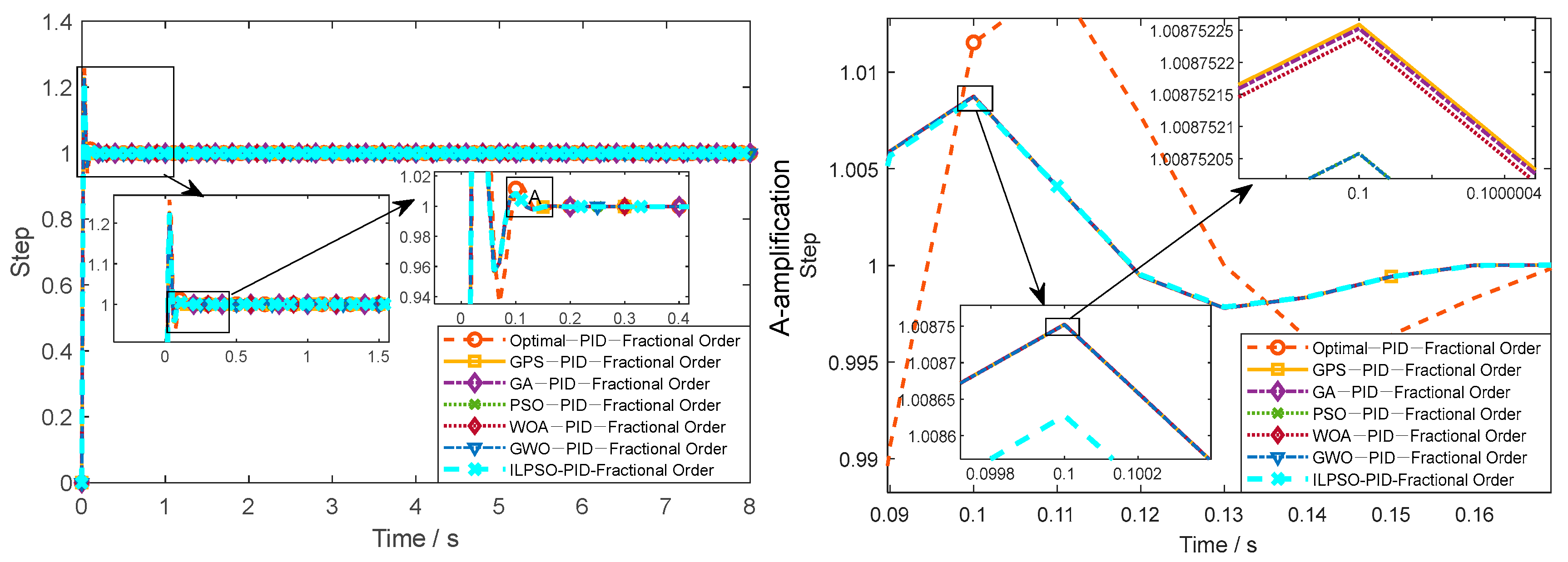
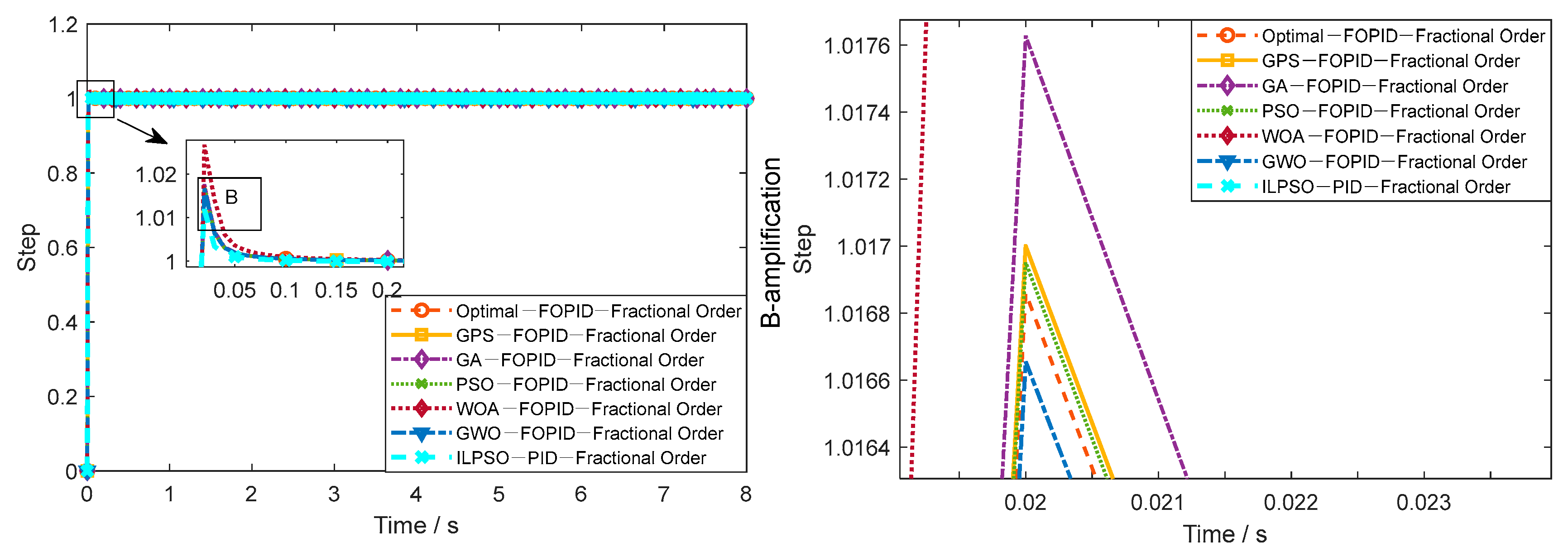
4.3. Simulation of Integer-Order and Fractional-Order Controllers Based on Intelligent Algorithms
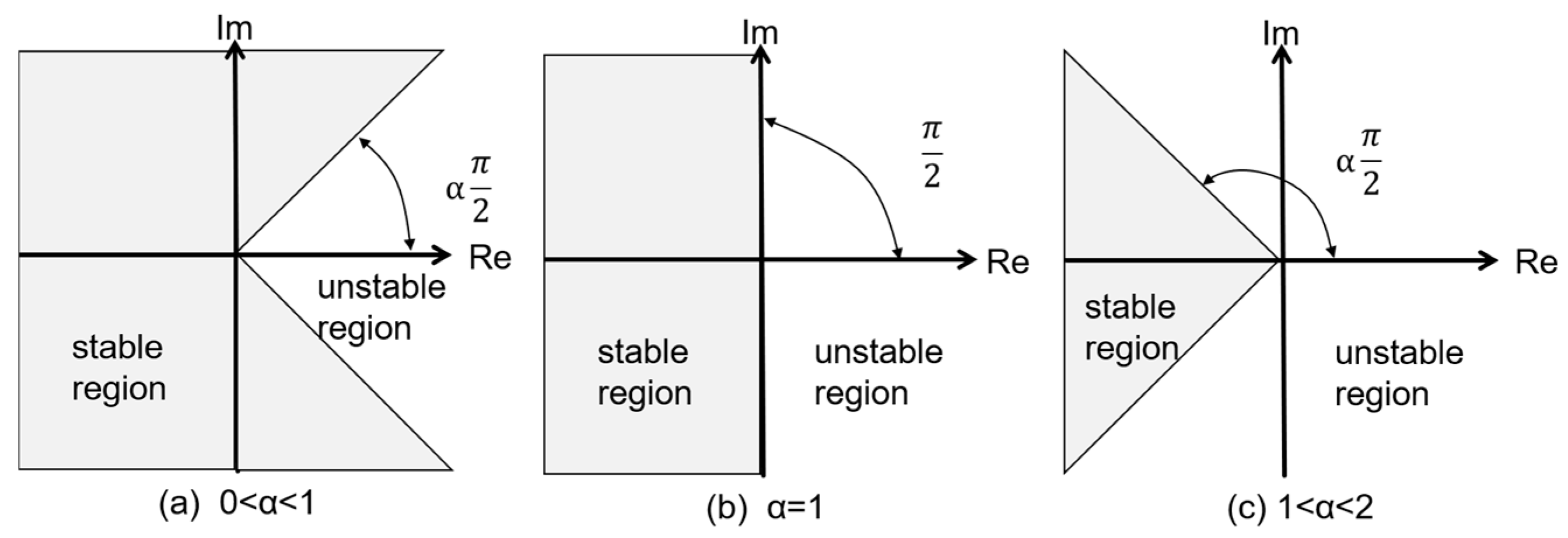
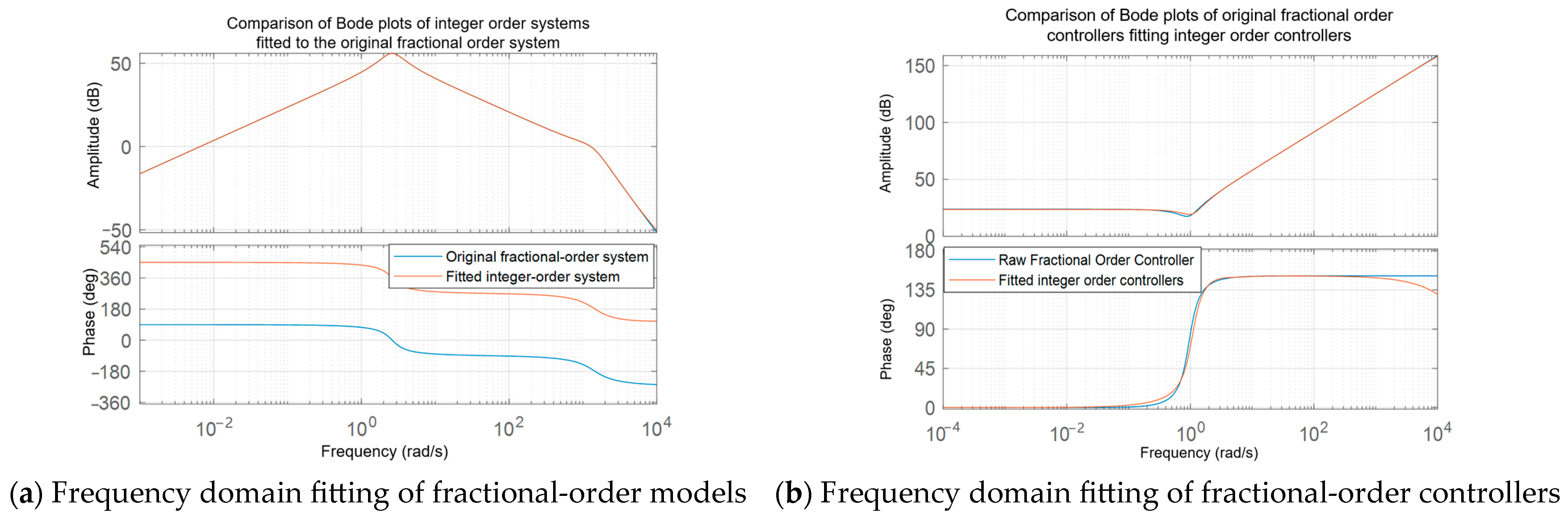
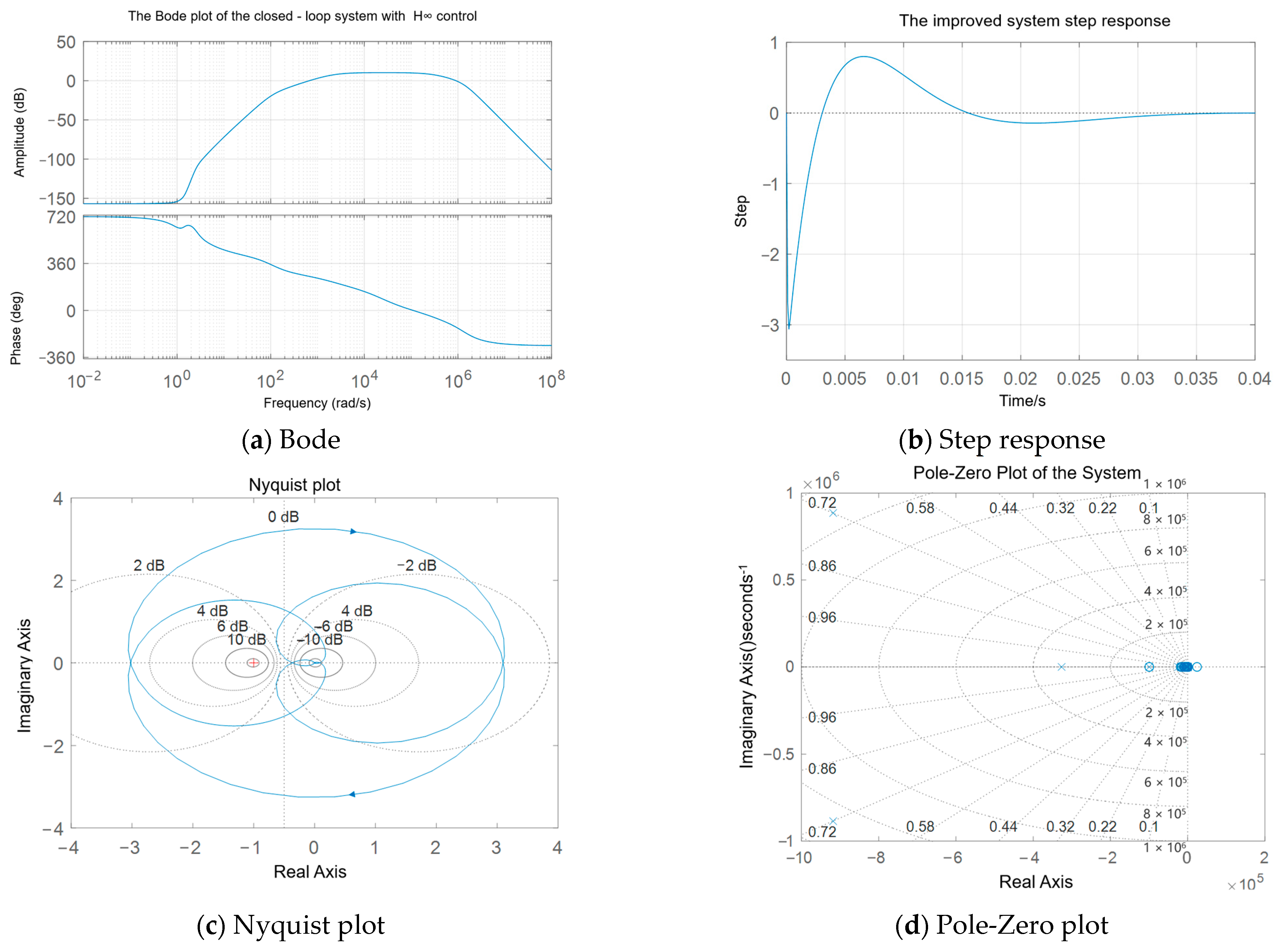
4.4. The Stability Analysis of the Model Under Fractional-Order Controllers
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kang, H.; Gao, F.; Xu, G.; Ren, H. Mechanical Behaviors of Coal Measures and Ground Control Technologies for China’s Deep Coal Mines—A Review. J. Rock Mech. Geotech. Eng. 2023, 15, 37–65. [Google Scholar] [CrossRef]
- Xie, Z.; Zhang, N.; Qian, D.; Han, C.; An, Y.; Wang, Y. Rapid Excavation and Stability Control of Deep Roadways for an Underground Coal Mine with High Production in Inner Mongolia. Sustainability 2018, 10, 1160. [Google Scholar] [CrossRef]
- Yang, X.; Wu, D.; Zou, X.; Chen, H.; Zhang, S. An Analysis of Digging Anchor Machine Stability and Track Wear under Digging Conditions. Sci. Rep. 2022, 12, 17738. [Google Scholar] [CrossRef]
- Li, F.; Duan, B.; Sun, Y.; He, X.; Li, Z.; Wang, B. Quantitative Risk Assessment Model of Working Positions for Roof Accidents in Coal Mine. Saf. Sci. 2024, 178, 106628. [Google Scholar] [CrossRef]
- Onifade, M.; Said, K.O.; Shivute, A.P. Safe Mining Operations through Technological Advancement. Process Saf. Environ. Prot. 2023, 175, 251–258. [Google Scholar] [CrossRef]
- Gao, Z.; Guo, Z. Type Characteristics and Research Direction of Automatic Bolting Frame. Coal Sci. Technol. 2023, 51, 212–224. [Google Scholar] [CrossRef]
- Daunt, A. “Empower the Future”: Komatsu Unveils New Drilling and Bolting Rigs. Quarry, 17 May 2024. [Google Scholar]
- Kang, H.; Yang, J.; Jiang, P.; Gao, F.; Li, W.; Li, J.; Chen, H. Theory, Technology and Application of Grouted Bolting in Soft Rock Roadways of Deep Coal Mines. Int. J. Min. Met. Mater. 2024, 31, 1463–1479. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, L.; Liu, C.; Sun, D.; Shao, J.; Li, Y. Research on Mechanism of Bolt-Grouting Reinforcement for Deep Fractured Rock Mass Based on Prestressed Anchor and Self-Stress Grouting. Rock. Soil. Mech. 2020, 41, 3651–3662. [Google Scholar] [CrossRef]
- Xie, M.; Li, Y.; Zhang, H.; Yang, Z.; Ren, Z.; Nie, R. Analysis of Drilling Vibration Characteristics of Anchoring System in Coal Mine. Sci. Rep. 2023, 13, 19236. [Google Scholar] [CrossRef]
- Liu, Q.; Zha, Y.; Liu, T.; Lu, C. Research on Adaptive Control of Air-Borne Bolting Rigs Based on Genetic Algorithm Optimization. Machines 2021, 9, 240. [Google Scholar] [CrossRef]
- Zhong, Q.; Zhang, B.; Bao, H.; Hong, H.; Ma, J.; Ren, Y.; Yang, H.; Fung, R. Analysis of Pressure and Flow Compound Control Characteristics of an Independent Metering Hydraulic System Based on a Two-Level Fuzzy Controller. J. Zhejiang Univ. Sci. A 2019, 20, 184–200. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional-Order Systems and PI/Sup /Spl Lambda//D/Sup /Spl Mu//-Controllers. IEEE Trans. Autom. Control 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Tepljakov, A.; Alagoz, B.B.; Yeroglu, C.; Gonzalez, E.A.; Hosseinnia, S.H.; Petlenkov, E.; Ates, A.; Cech, M. Towards Industrialization of FOPID Controllers: A Survey on Milestones of Fractional-Order Control and Pathways for Future Developments. IEEE Access 2021, 9, 21016–21042. [Google Scholar] [CrossRef]
- Lino, P.; Maione, G.; Stasi, S.; Padula, F.; Visioli, A. Synthesis of Fractional-Order PI Controllers and Fractional-Order Filters for Industrial Electrical Drives. IEEE/CAA J. Autom. Sin. 2017, 4, 58–69. [Google Scholar] [CrossRef]
- Hassan, F.; Zolotas, A. Impact of Fractional Order Methods on Optimized Tilt Control for Rail Vehicles. Fract. Calc. Appl. Anal. 2017, 20, 765–789. [Google Scholar] [CrossRef]
- Jiangbo, Z.; Junzheng, W. The Fractional Order PI Control for an Energy Saving Electro-Hydraulic System. Trans. Inst. Meas. Control 2017, 39, 505–519. [Google Scholar] [CrossRef]
- Birs, I.; Muresan, C.; Mihai, M.; Dulf, E.; De Keyser, R. Tuning Guidelines and Experimental Comparisons of Sine Based Auto-Tuning Methods for Fractional Order Controllers. IEEE Access 2022, 10, 86671–86683. [Google Scholar] [CrossRef]
- Tseng, K.-H.; Chung, M.-Y.; Chang, C.-Y.; Hsieh, C.-L.; Tseng, Y.-K. Parameter Optimization of Nanosilver Colloid Prepared by Electrical Spark Discharge Method Using Ziegler-Nichols Method. J. Phys. Chem. Solids 2021, 148, 109650. [Google Scholar] [CrossRef]
- Wu, Q. The Hybrid Forecasting Model Based on Chaotic Mapping, Genetic Algorithm and Support Vector Machine. Expert Syst. Appl. 2010, 37, 1776–1783. [Google Scholar] [CrossRef]
- Wang, T.; Xu, J.; Luo, W.; Yu, Y.; Huang, Z. A Novel Fruit Fly Optimization Algorithm with Levi Flight and Challenge Probability. Procedia Comput. Sci. 2021, 183, 182–188. [Google Scholar] [CrossRef]
- Yu, B.; Zhu, Q.; Yao, J.; Zhang, J.; Huang, Z.; Jin, Z.; Wang, X. Design, Mathematical Modeling and Force Control for Electro-Hydraulic Servo System with Pump-Valve Compound Drive. IEEE Access 2020, 8, 171988–172005. [Google Scholar] [CrossRef]
- Barisal, A.K. Comparative Performance Analysis of Teaching Learning Based Optimization for Automatic Load Frequency Control of Multi-Source Power Systems. Int. J. Electr. Power Energy Syst. 2015, 66, 67–77. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, Y.; Che, L.; Wang, N.; Bai, Y.; Wang, C. Workspace Analysis and Motion Control Strategy of Robotic Mine Anchor Drilling Truck Manipulator Based on the WOA-FOPID Algorithm. Front. Earth Sci. 2022, 10, 954547. [Google Scholar] [CrossRef]
- Elghardouf, N.; Ennaciri, Y.; Elakkary, A.; Sefiani, N. Multi-Loop Active Disturbance Rejection Control and PID Control Strategy for Poultry House Based on GA, PSO and GWO Algorithms. Heliyon 2024, 10, e29579. [Google Scholar] [CrossRef]
- Benbouhenni, H.; Hamza, G.; Oproescu, M.; Bizon, N.; Thounthong, P.; Colak, I. Application of Fractional-Order Synergetic-Proportional Integral Controller Based on PSO Algorithm to Improve the Output Power of the Wind Turbine Power System. Sci. Rep. 2024, 14, 609. [Google Scholar] [CrossRef]
- Mughees, A.; Mughees, N.; Mughees, A.; Mohsin, S.A.; Ejsmont, K. Enhancing Stability and Position Control of a Constrained Magnetic Levitation System through Optimal Fractional-Order PID Controller. Alex. Eng. J. 2024, 107, 730–746. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Mittag–Leffler Stability of Fractional Order Nonlinear Dynamic Systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Muresan, C.I.; Dutta, A.; Dulf, E.H.; Pinar, Z.; Maxim, A.; Ionescu, C.M. Tuning Algorithms for Fractional Order Internal Model Controllers for Time Delay Processes. Int. J. Control 2016, 89, 579–593. [Google Scholar] [CrossRef]
- Merrikh-Bayat, F. Rules for Selecting the Parameters of Oustaloup Recursive Approximation for the Simulation of Linear Feedback Systems Containing PIλDμ Controller. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 1852–1861. [Google Scholar] [CrossRef]
- Fiuzy, M.; Shamaghdari, S. Robust H∞-PID Control Stability of Fractional-Order Linear Systems with Polytopic and Two-Norm Bounded Uncertainties Subject to Input Saturation. Math. Comput. Simul. 2023, 208, 550–581. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Parameter Meaning | Parameter Value | Parameter Unit |
|---|---|---|---|
| Effective area of hydraulic cylinder piston | |||
| Hydraulic cylinder rod chamber volume | |||
| Integrated modulus of elasticity of oil | |||
| Fluid density | |||
| Piston and load viscous damping factor | |||
| Hydraulic internal leakage coefficient | |||
| Amplifier gain | |||
| Proportional directional valve flow–pressure coefficients | |||
| Proportional directional valve flow Gain | |||
| Proportional directional valves inherent frequency | |||
| Proportional directional valve damping ratio | - | ||
| Intrinsic frequency of hydraulic cylinders | |||
| Hydraulic cylinder damping ratio | - |
| The Combination of Algorithms | Dynamic Performance Indices | ||
|---|---|---|---|
| Standard Deviation | Overshoot (%) | Settling Time (s) | |
| Optimal—PID—Fractional Order | 0.04105250 | 25.69880644 | 0.08686147 |
| GPS—PID—Fractional Order | 0.03935165 | 22.66074833 | 0.07672818 |
| GA—PID—Fractional Order | 0.03935165 | 22.66074707 | 0.07672817 |
| PSO—PID—Fractional Order | 0.03935162 | 22.66085904 | 0.07672776 |
| WOA—PID—Fractional Order | 0.03935383 | 22.66073568 | 0.07672815 |
| GWO—PID—Fractional Order | 0.03935162 | 22.66084247 | 0.07672839 |
| ILPSO—PID—Fractional Order | 0.01096019 | 22.52362913 | 0.07674312 |
| Optimal—FOPID—Fractional Order | 0.03539254 | 1.68594987 | 0.01488788 |
| GPS—FOPID—Fractional Order | 0.03539242 | 1.70006201 | 0.01487047 |
| GA—FOPID—Fractional Order | 0.03539638 | 1.76267692 | 0.01494976 |
| PSO—FOPID—Fractional Order | 0.03539228 | 1.69513369 | 0.01487006 |
| WOA—FOPID—Fractional Order | 0.03535262 | 1.38877840 | 0.01274958 |
| GWO—FOPID—Fractional Order | 0.03539180 | 1.66546752 | 0.01487959 |
| ILPSO—FOPID—Fractional Order | 0.01275531 | 1.18614015 | 0.00977436 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Zhang, J.; Xie, J.; Shi, W.; Zhao, J. Research on Fractional-Order Control of Anchor Drilling Machine Optimized by Intelligent Algorithms. Appl. Sci. 2025, 15, 5656. https://doi.org/10.3390/app15105656
Li J, Zhang J, Xie J, Shi W, Zhao J. Research on Fractional-Order Control of Anchor Drilling Machine Optimized by Intelligent Algorithms. Applied Sciences. 2025; 15(10):5656. https://doi.org/10.3390/app15105656
Chicago/Turabian StyleLi, Jingkai, Jun Zhang, Jiaquan Xie, Wei Shi, and Jianzhong Zhao. 2025. "Research on Fractional-Order Control of Anchor Drilling Machine Optimized by Intelligent Algorithms" Applied Sciences 15, no. 10: 5656. https://doi.org/10.3390/app15105656
APA StyleLi, J., Zhang, J., Xie, J., Shi, W., & Zhao, J. (2025). Research on Fractional-Order Control of Anchor Drilling Machine Optimized by Intelligent Algorithms. Applied Sciences, 15(10), 5656. https://doi.org/10.3390/app15105656