
Multi-Attribute Collaborative Optimization for Multimodal Transportation Based on User Preferences

Abstract
1. Background and Motivation
2. Literature Review and Research Gap
- (1)
- In terms of modeling factors: This study fully considers the time window characteristics of various transportation modes. Differentiated time window models are established for the continuous time windows of highway transportation, the train schedule constraints of railway transportation, and the arrival and departure times of waterway transportation.
- (2)
- In terms of algorithm design: A fusion of GA and AFO is adopted. GA is utilized to generate the initial population, and then AFO is employed for iterative calculations. This approach avoids both the tendency of GA to fall into local optima and the slow iteration speed of AFO.
- (3)
- In terms of decision-making methods: A four-objective optimization model is constructed to minimize generalized transportation costs, transportation time, carbon emissions, and risks. By designing a fuzzy evaluation matrix, the demand preference information of multimodal transportation participants is quantified, thereby achieving a deep integration of transportation scheme formulation with user preferences.
3. Problem Description and Model Construction
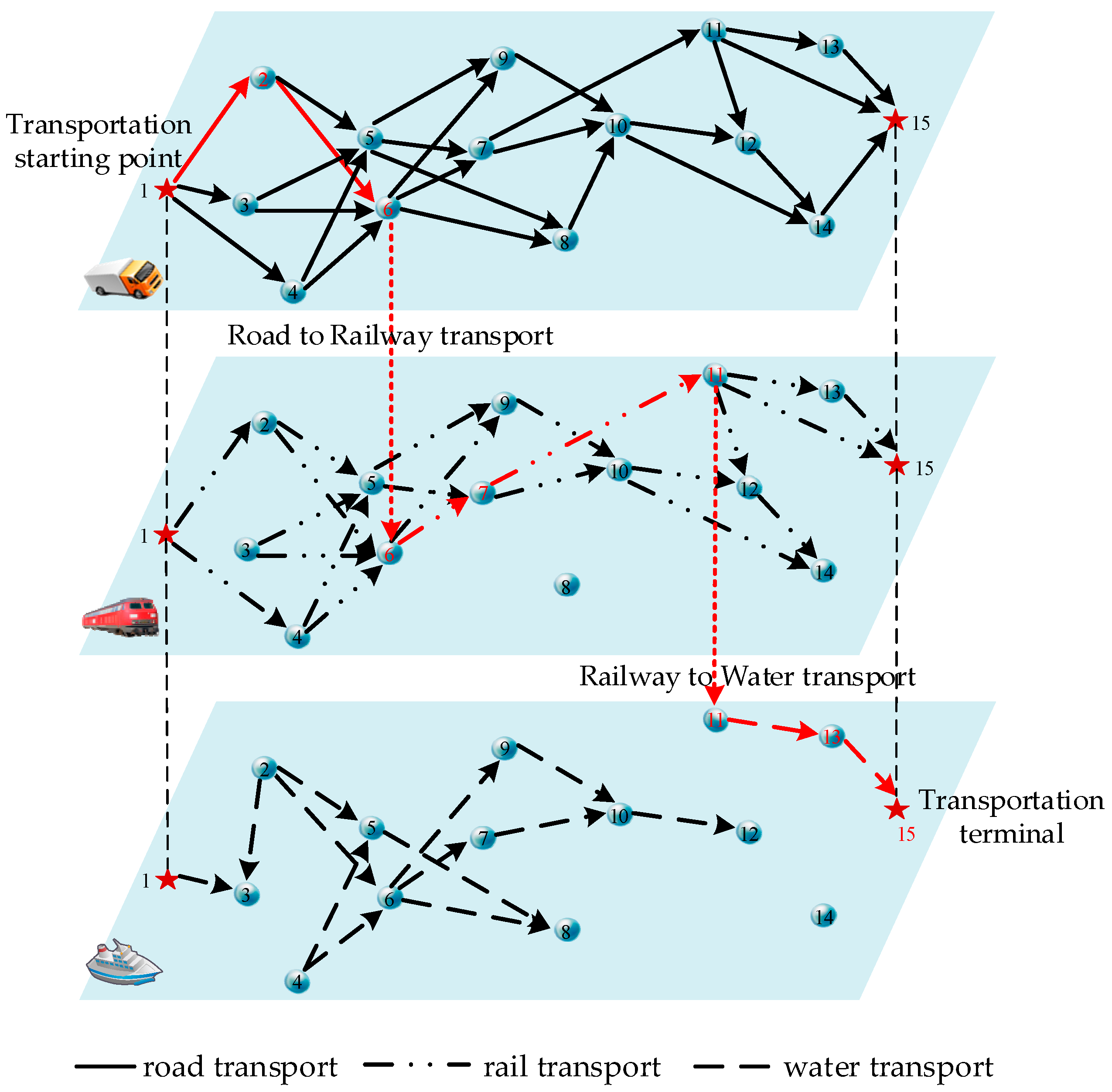
3.1. Problem Description
3.2. Assumptions
3.3. Parameter Description
3.4. Model Construction
4. Methodology
4.1. Genetic Algorithm
4.1.1. Encoding and Decoding
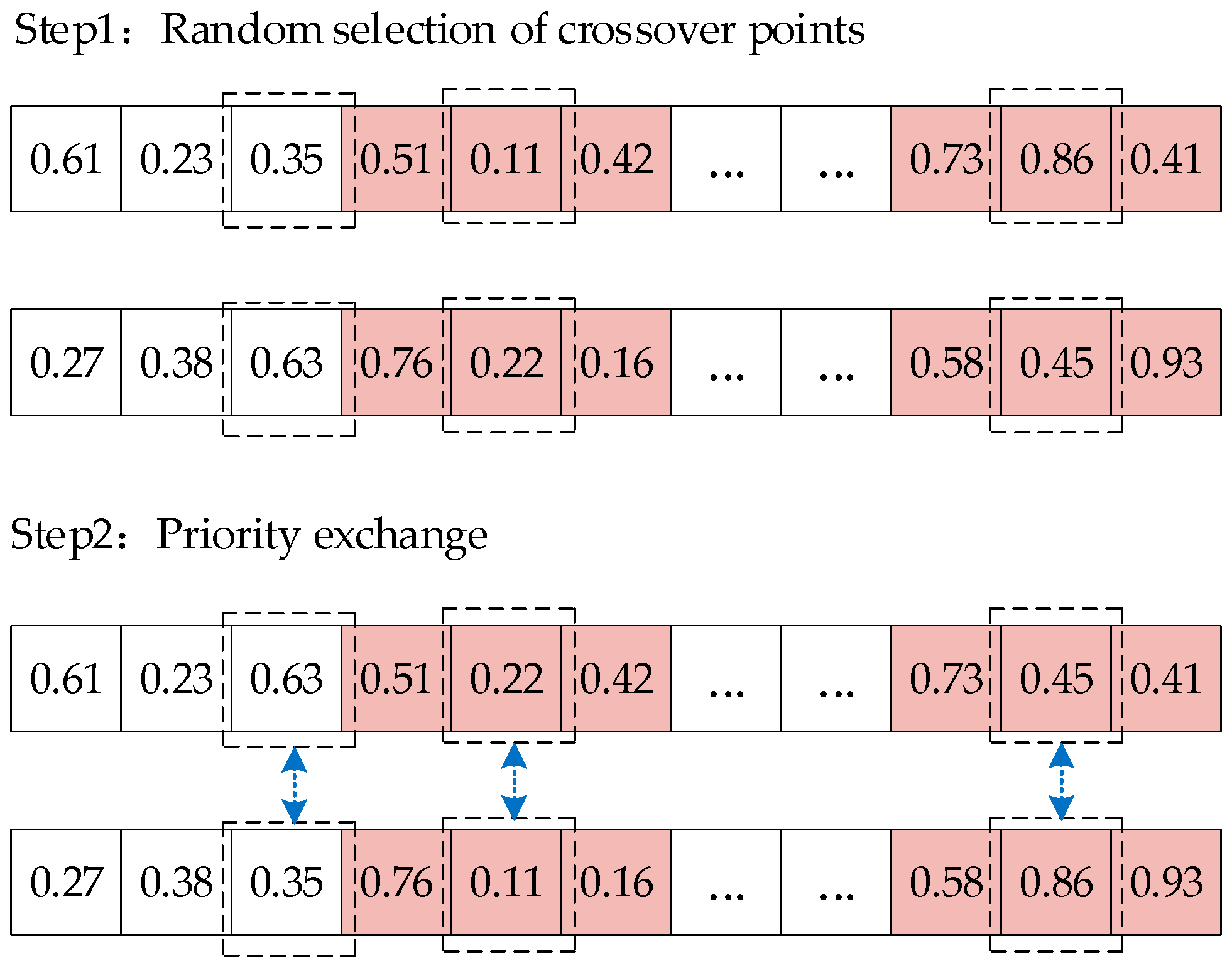
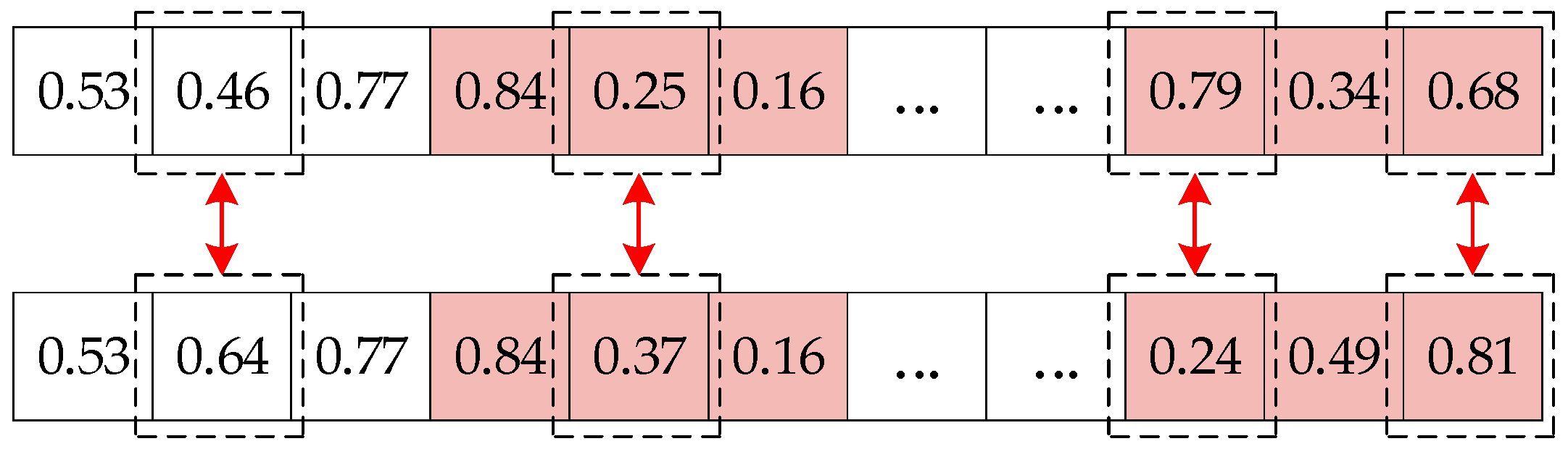
4.1.2. Crossover and Mutation
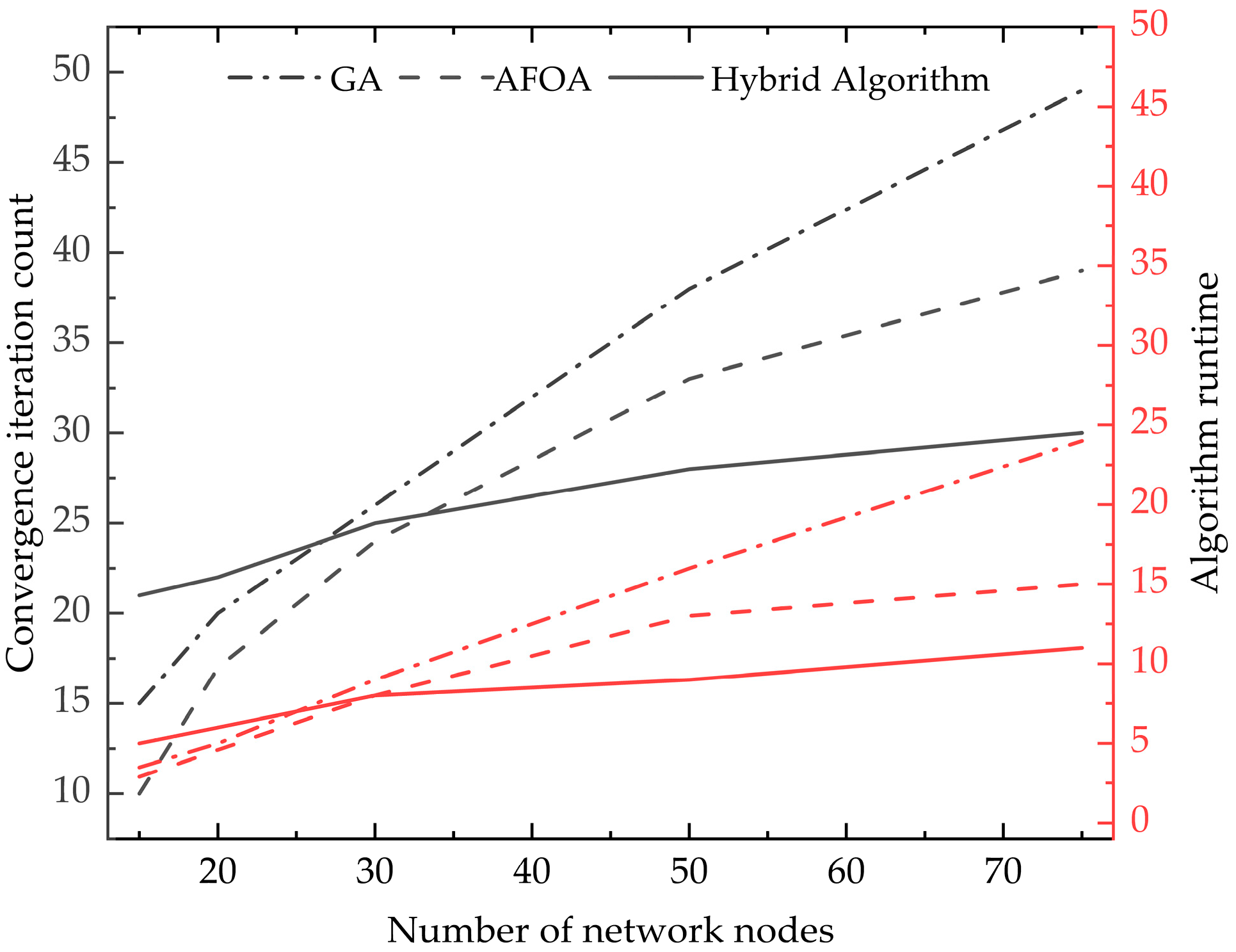
4.2. Hybrid Algorithm
4.3. Multi-Attribute Decision Making
5. Case Study
5.1. Case Description
5.2. Case Solution
5.3. Decision Result Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- SteadieSeifi, M.; Dellaert, N.P.; Nuijten, W.; Van Woensel, T.; Raoufi, R. Multimodal Freight Transportation Planning: A Literature Review. Eur. J. Oper. Res. 2014, 233, 1–15. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, J.; Wu, G.; Chen, J.Q. Solving the Mode Selection Problem with Fixed Transportation Cost in Intermodal Transportation. J. Southwest Jiaotong Univ. 2012, 47, 881–887. [Google Scholar]
- Chen, X.; Hu, X.; Liu, H.B. Low-Carbon Route Optimization Model for Multimodal Freight Transport Considering Value and Time Attributes. Socio-Econ. Plan. Sci. 2024, 96, 102108. [Google Scholar] [CrossRef]
- Tang, J.H.; Ji, S.F.; Jiang, L.W.; Zhu, B.L. The Effect of Consumers Bounded “Carbon Behavior” Preference on Location-Routing-Inventory Optimization. J. Manag. Sci. 2016, 24, 110–119. [Google Scholar]
- Wu, P.; Li, Z.; Ji, H.T. Route and Speed Optimization for Green Intermodal Transportation Considering Emission Control Area. J. Transp. Syst. Eng. Inf. Technol. 2023, 23, 20–29. [Google Scholar]
- Liu, S. Multimodal Transportation Route Optimization of Cold Chain Container in Time-Varying Network Considering Carbon Emissions. Sustainability 2023, 15, 4435. [Google Scholar] [CrossRef]
- Bula, G.A.; Afsar, H.M.; González, F.A.; Prodhon, C.; Velasco, N. Bi-Objective Vehicle Routing Problem for Hazardous Materials Transportation. J. Clean. Prod. 2019, 206, 976–986. [Google Scholar] [CrossRef]
- Demir, E.; Hrušovský, M.; Jammernegg, W.; Van Woensel, T. Green Intermodal Freight Transportation: Bi-Objective Modelling and Analysis. Int. J. Prod. Res. 2019, 57, 6162–6180. [Google Scholar] [CrossRef]
- Mouna, M.; Sadok, B. Firework Algorithm for Multi-Objective Optimization of a Multimodal Transportation Network Problem. Procedia Comput. Sci. 2017, 112, 1670–1682. [Google Scholar]
- Zhang, H.; Huang, Q.; Ma, L.; Zhang, Z. Sparrow Search Algorithm with Adaptive T Distribution for Multi-Objective Low-Carbon Multimodal Transportation Planning Problem with Fuzzy Demand and Fuzzy Time. Expert Syst. Appl. 2024, 238, 122042. [Google Scholar] [CrossRef]
- Laurent, A.B.; Vallerand, S.; van der Meer, Y.; D’Amours, S. CarbonRoadMap: A multicriteria decision tool for multimodal transportation. Int. J. Sustain. Transp. 2020, 14, 205–214. [Google Scholar] [CrossRef]
- Li, Z.; Liu, Y.; Yang, Z. An Effective Kernel Search and Dynamic Programming Hybrid Heuristic for a Multimodal Transportation Planning Problem with Order Consolidation. Transp. Res. Part E 2021, 152, 102408. [Google Scholar] [CrossRef]
- Tang, J.H.; Ji, S.F.; Zhang, Y.; Zhu, B.L. Research on Collaboration of Location-Routing-Inventory Optimization Model Based on the Consumers’ Low Carbon Behaviors Preference. Oper. Res. Manag. Sci. 2017, 26, 35–44. [Google Scholar]
- Adil, B.; Kemal, S. A Multi-Objective Sustainable Load Planning Model for Intermodal Transportation Networks with a Real-Life Application. Transp. Res. Part E 2016, 95, 207–247. [Google Scholar]
- Li, Y.M.; Qiu, M.; Yan, K.L.; Liu, Q.X. Multimodal Transportation Route Selection of Fresh Products Considering Time Window with the Participation of High-Speed Rail. J. Chongqing Jiaotong Univ. Nat. Sci. Ed. 2021, 40, 54–61. [Google Scholar]
- Liu, J.; Peng, Q.Y.; Yin, Y. Multimodal Transportation Route Planning under Low Carbon Emissions Background. J. Transp. Syst. Eng. Inf. Technol. 2018, 18, 243–249. [Google Scholar]
- Yin, W.; Hu, W.; Yan, X.; Peng, B.; Yang, X. A Time-Space Network-Based Model for Transportation Service Optimization of China Railway Express. High-Speed Railw. 2024, 2, 153–163. [Google Scholar] [CrossRef]
- Liu, X.; Chen, Y.L.; Por, L.Y.; Ku, C.S. A Systematic Literature Review of Vehicle Routing Problems with Time Windows. Sustainability 2023, 15, 12004. [Google Scholar] [CrossRef]
- Zhang, M. Optimization of Multimodal Transport Routes Considering Carbon Emissions in Fuzzy Scenarios. Int. Core J. Eng. 2022, 8, 35. [Google Scholar]
- Cheng, J. Research on Optimizing Multimodal Transport Path under the Schedule Limitation Based on Genetic Algorithm. J. Phys. Conf. Ser. 2022, 2258, 012014. [Google Scholar]
- Oudani, M. A Simulated Annealing Algorithm for Intermodal Transportation on Incomplete Networks. Appl. Sci. 2021, 11, 4467. [Google Scholar] [CrossRef]
- Faroqi, H.; Mesgari, M.S. Performance Comparison between the Multi-Colony and Multi-Pheromone ACO Algorithms for Solving the Multi-Objective Routing Problem in a Public Transportation Network. J. Navig. 2016, 69, 197–210. [Google Scholar] [CrossRef]
- Zhang, P.; Yang, J.; Lou, F.; Wang, J.; Sun, X. Aptenodytes Forsteri Optimization Algorithm Based on Adaptive Perturbation of Oscillation and Mutation Operation for Image Multi-Threshold Segmentation. Expert Syst. Appl. 2023, 224, 120058. [Google Scholar] [CrossRef]
- Zheng, C.; Sun, K.; Gu, Y.; Shen, J.; Du, M. Multimodal Transport Path Selection of Cold Chain Logistics Based on Improved Particle Swarm Optimization Algorithm. J. Adv. Transp. 2022, 2022, 5458760. [Google Scholar] [CrossRef]
- Zukhruf, F.; Frazila, R.B.; Burhani, J.T.; Prakoso, A.D.; Sahadewa, A.; Langit, J.S. Developing an Integrated Restoration Model of Multimodal Transportation Network. Transp. Res. Part D Transp. Environ. 2022, 110, 103413. [Google Scholar] [CrossRef]
- Archetti, C.; Peirano, L.; Speranza, M.G. Optimization in Multimodal Freight Transportation Problems: A Survey. Eur. J. Oper. Res. 2022, 299, 1–20. [Google Scholar] [CrossRef]
- Li, L.; Zhang, Q.; Zhang, T.; Zou, Y.; Zhao, X. Optimum Route and Transport Mode Selection of Multimodal Transport with Time Window under Uncertain Conditions. Mathematics. 2023, 11, 3244. [Google Scholar] [CrossRef]
- Peng, Y.; Yong, P.; Luo, Y. The Route Problem of Multimodal Transportation with Timetable under Uncertainty: Multi-Objective Robust Optimization Model and Heuristic Approach. RAIRO Oper. Res. 2020, 55, S3035–S3050. [Google Scholar] [CrossRef]
- Guo, J.; Liu, H.; Liu, T.; Song, G.; Guo, B. The Multi-Objective Shortest Path Problem with Multimodal Transportation for Emergency Logistics. Mathematics 2024, 12, 2615. [Google Scholar] [CrossRef]
- Eltoukhy, M.M.; Zakaraia, M. A Modified Emperor Penguin Optimizer Algorithm for Solving Fixed-Charged Transshipment Problem. Informatica 2024, 48, 79–94. [Google Scholar] [CrossRef]
- Yang, Z.; Deng, L.B.; Wang, Y.C.; Liu, J.F. Aptenodytes Forsteri Optimization: Algorithm and Applications. Knowl. Based Syst. 2021, 232, 107483. [Google Scholar] [CrossRef]
- Xu, Z.S. Uncertain Multiple Attribute Decision Making Methods and Applications; Tsinghua University Press: Beijing, China, 2004. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Highway | Railway | Waterway | |
|---|---|---|---|
| Highway | 0 | 3.09/1/1.56 | 5.23/1/6 |
| Railway | 3.09/1/1.56 | 0 | 26.62/2/3.12 |
| Waterway | 5.23/1/6 | 26.62/2/3.12 | 0 |
| Transportation Mode | Data Category | Value |
|---|---|---|
| Highway | Transportation cost (CNY (t/km)−1) | 0.3 |
| Carbon emission factor (kg (t/km)−1) | 0.796 | |
| Railway | Transportation cost (CNY (t/km)−1) | 0.2 |
| Carbon emission factor (kg (t/km)−1) | 0.028 | |
| Waterway | Transportation cost (CNY (t/km)−1) | 0.1 |
| Carbon emission factor (kg (t/km)−1) | 0.04 |
| Transportation Arc Segment | Highway | Railway | Waterway | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Distance/km | Capacity/t | Risk | Distance/km | Capacity/t | Risk | Distance/km | Capacity/t | Risk | |
| (1, 2) | 400 | 160 | 20 | 312 | 180 | 12 | — | — | — |
| (1, 3) | 350 | 190 | 18 | — | — | — | 650 | 175 | 10 |
| (1, 4) | 435 | 168 | 10 | 424 | 190 | 8 | — | — | — |
| (2, 3) | 700 | 110 | 10 | — | — | — | 550 | 210 | 15 |
| (2, 5) | 318 | 210 | 20 | 335 | 220 | 20 | 463 | 190 | 20 |
| (2, 6) | 428 | 168 | 25 | 390 | 190 | 20 | 453 | 185 | 12 |
| (3, 5) | 285 | 180 | 15 | 379 | 195 | 25 | — | — | — |
| (3, 6) | 306 | 100 | 14 | 337 | 110 | 18 | — | — | — |
| (4, 5) | 264 | 180 | 13 | 275 | 230 | 14 | 342 | 210 | 18 |
| (4, 6) | 273 | 170 | 10 | 289 | 140 | 10 | 352 | 200 | 11 |
| (5, 7) | 250 | 215 | 4 | 369 | 228 | 8 | — | — | — |
| (5, 8) | 700 | 200 | 9 | — | — | — | 650 | 180 | 10 |
| (5, 9) | 509 | 180 | 5 | 458 | 195 | 6 | — | — | — |
| (6, 7) | 441 | 230 | 6 | 851 | 220 | 16 | 420 | 230 | 8 |
| (6, 8) | 345 | 400 | 12 | — | — | — | 392 | 390 | 12 |
| (6, 9) | 513 | 220 | 10 | 231 | 190 | 10 | 496 | 198 | 5 |
| (7, 10) | 400 | 180 | 8 | 468 | 220 | 8 | 460 | 215 | 6 |
| (7, 11) | 608 | 180 | 18 | 655 | 195 | 14 | — | — | — |
| (8, 10) | 124 | 215 | 4 | — | — | — | — | — | — |
| (9, 10) | 100 | 200 | 4 | 163 | 220 | 5 | 158 | 180 | 4 |
| (10, 12) | 292 | 220 | 15 | 399 | 230 | 16 | — | — | — |
| (10, 14) | 523 | 180 | 8 | 485 | 228 | 8 | — | — | — |
| (11, 12) | 290 | 170 | 14 | 399 | 140 | 15 | — | — | — |
| (11, 13) | 284 | 150 | 10 | 266 | 195 | 12 | 317 | 182 | 16 |
| (11, 15) | 600 | 200 | 8 | 482 | 210 | 6 | — | — | — |
| (12, 14) | 369 | 220 | 19 | — | — | — | — | — | — |
| (13, 15) | 141 | 200 | 4 | 274 | 220 | 5 | 119 | 180 | 5 |
| (14, 15) | 379 | 180 | 10 | — | — | — | — | — | — |
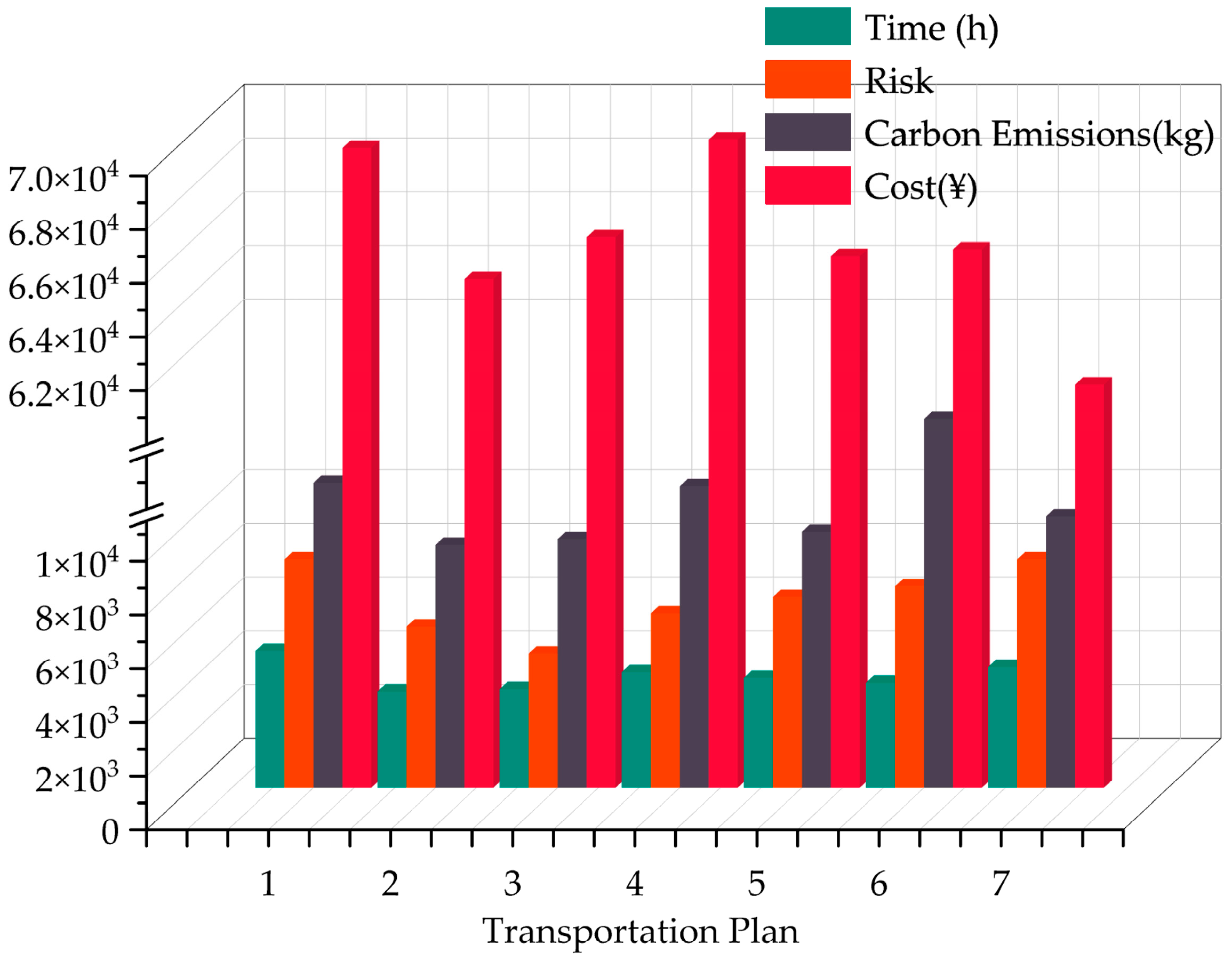
| Scheme | Transportation Path | Transportation Mode | Cost/CNY | Carbon Emission/kg | Time/h | Risk |
|---|---|---|---|---|---|---|
| 1 | 1-2-5-7-11-15 | Railway-Waterway-Railway-Railway-Railway | 69,471 | 11,350 | 50.95 | 85 |
| 2 | 1-2-5-7-11-15 | Railway-Railway-Railway-Railway-Railway | 64,590 | 9042.6 | 35.89 | 60 |
| 3 | 1-4-5-7-11-15 | Railway-Railway-Railway-Railway-Railway | 66,150 | 9261 | 36.75 | 50 |
| 4 | 1-4-6-7-11-15 | Railway-Railway-Waterway-Railway-Railway | 69,786 | 11,226 | 53.04 | 65 |
| 5 | 1-4-5-7-11-13-15 | Railway-Railway-Railway-Railway-Railway-Waterway | 65,448 | 9535.8 | 40.89 | 71 |
| 6 | 1-2-5-7-11-15 | Railway-Railway-Highway-Railway-Railway | 65,697 | 37,811 | 39.1 | 75 |
| 7 | 1-2-5-7-11-13-15 | Railway-Railway-Railway-Railway-Waterway-Waterway | 60,663 | 10,102 | 44.96 | 85 |
| Scenarios | Scenario 1 | Scenario 2 | Scenario 3 |
|---|---|---|---|
| = 0.2187 | = 0.2918 | = 0.7246 | |
| = 0.4692 | = 0.1275 | = 0.0145 | |
| = 0.2025 | = 0.2307 | = 0.1140 | |
| = 0.1096 | = 0.3500 | = 0.0469 | |
| = 0.7717 | = 0.7248 | = 0.7522 | |
| = 0.9684 | = 0.9239 | = 0.8481 | |
| = 0.9661 | = 0.9674 | = 0.8369 | |
| = 0.7894 | = 0.7817 | = 0.7548 | |
| = 0.9026 | = 0.8403 | = 0.8185 | |
| = 0.5731 | = 0.7450 | = 0.8085 | |
| = 0.8648 | = 0.7960 | = 0.8562 | |
| Scheme ranking |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Gao, G. Multi-Attribute Collaborative Optimization for Multimodal Transportation Based on User Preferences. Appl. Sci. 2025, 15, 5512. https://doi.org/10.3390/app15105512
Lu Y, Gao G. Multi-Attribute Collaborative Optimization for Multimodal Transportation Based on User Preferences. Applied Sciences. 2025; 15(10):5512. https://doi.org/10.3390/app15105512
Chicago/Turabian StyleLu, Youpeng, and Gang Gao. 2025. "Multi-Attribute Collaborative Optimization for Multimodal Transportation Based on User Preferences" Applied Sciences 15, no. 10: 5512. https://doi.org/10.3390/app15105512
APA StyleLu, Y., & Gao, G. (2025). Multi-Attribute Collaborative Optimization for Multimodal Transportation Based on User Preferences. Applied Sciences, 15(10), 5512. https://doi.org/10.3390/app15105512