Vehicle Lateral Control Based on Augmented Lagrangian DDPG Algorithm



Abstract
1. Introduction
2. Preliminaries
3. Problem Formulation
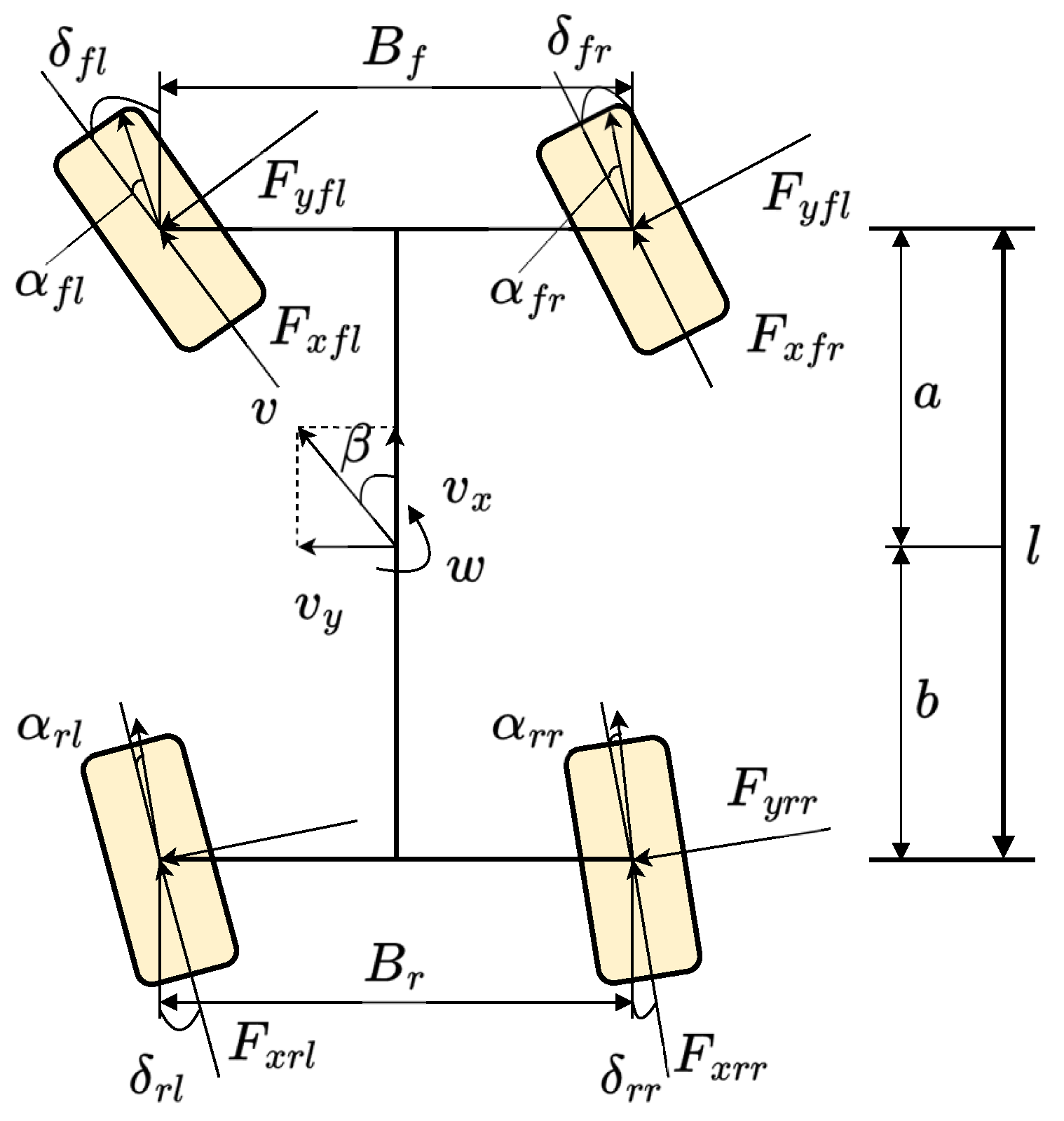
3.1. The Dynamic Model of the Four-Wheel Steering Vehicle
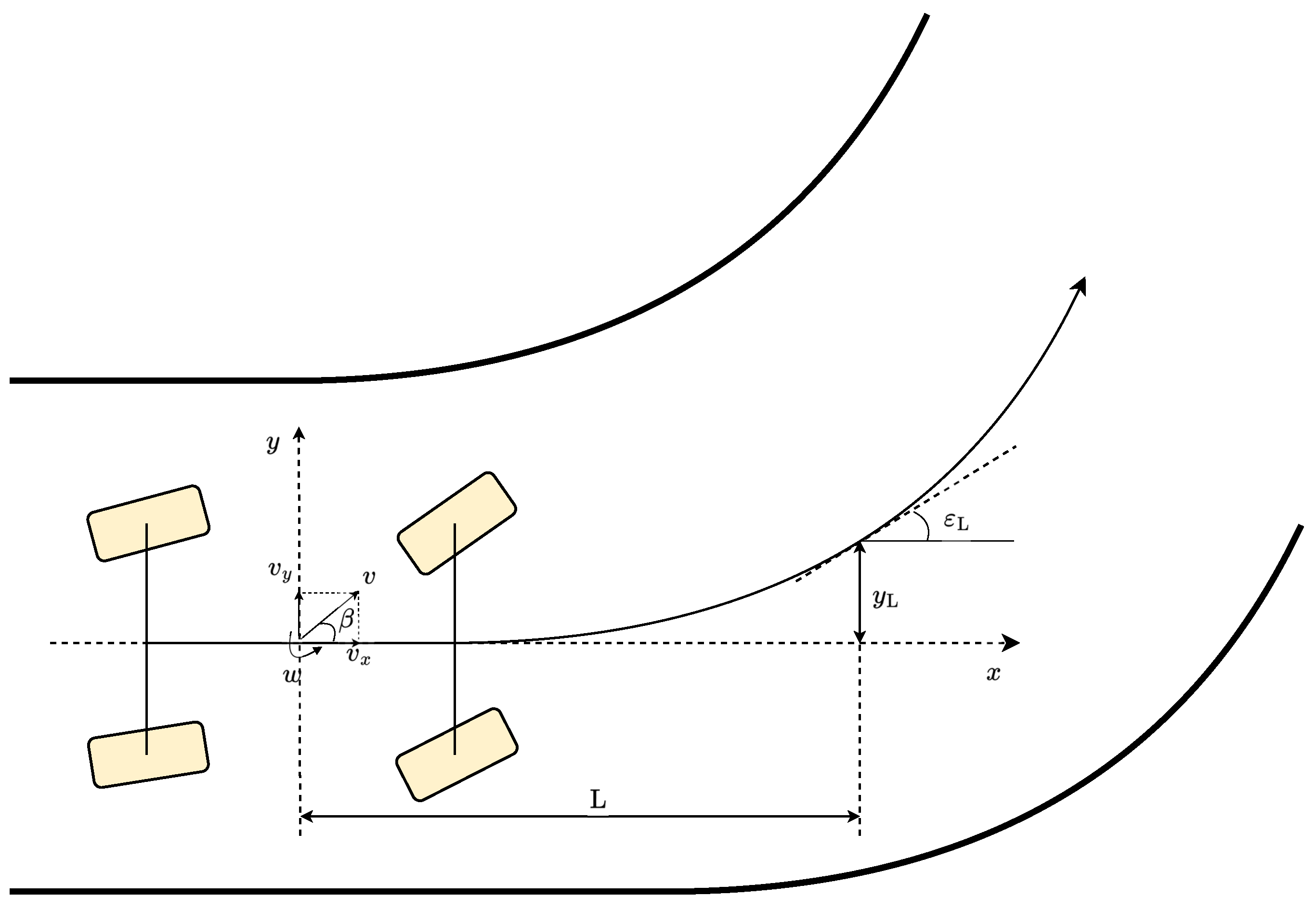
3.2. The Vehicle Trajectory Error System
3.3. Constrained Reinforcement Learning-Based Tracking Control Framework
4. Main Results
4.1. Augmented Lagrangian Method for Safe RL
4.2. Reward Function Design
4.3. Vehicle Tracking Control Algorithm Based on Safety Constraints
| Algorithm 1 Based on the Augmented Lagrangian Method for Safe DDPG Algorithms (DDPGALM). |
|
5. Simulation Studies
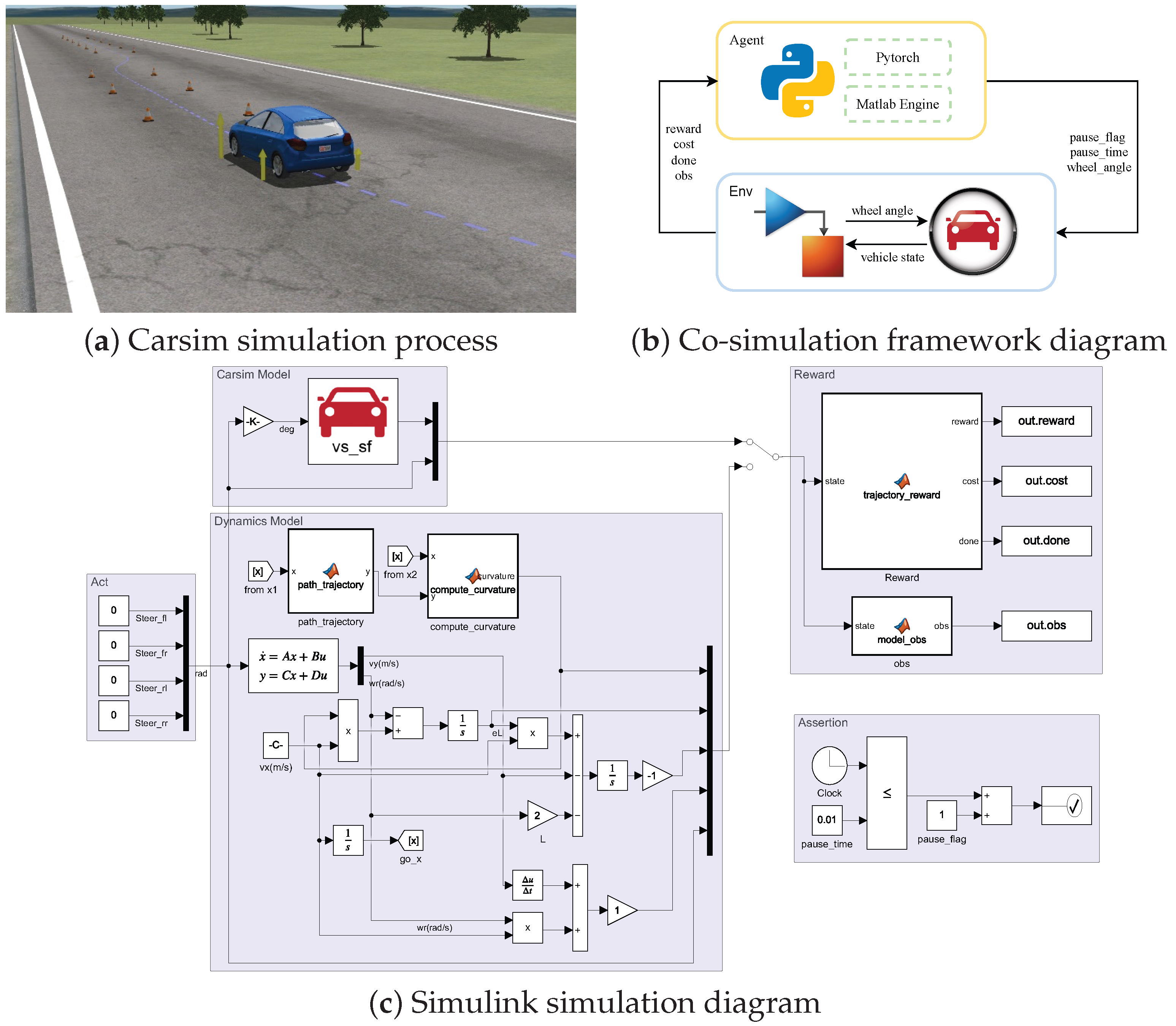
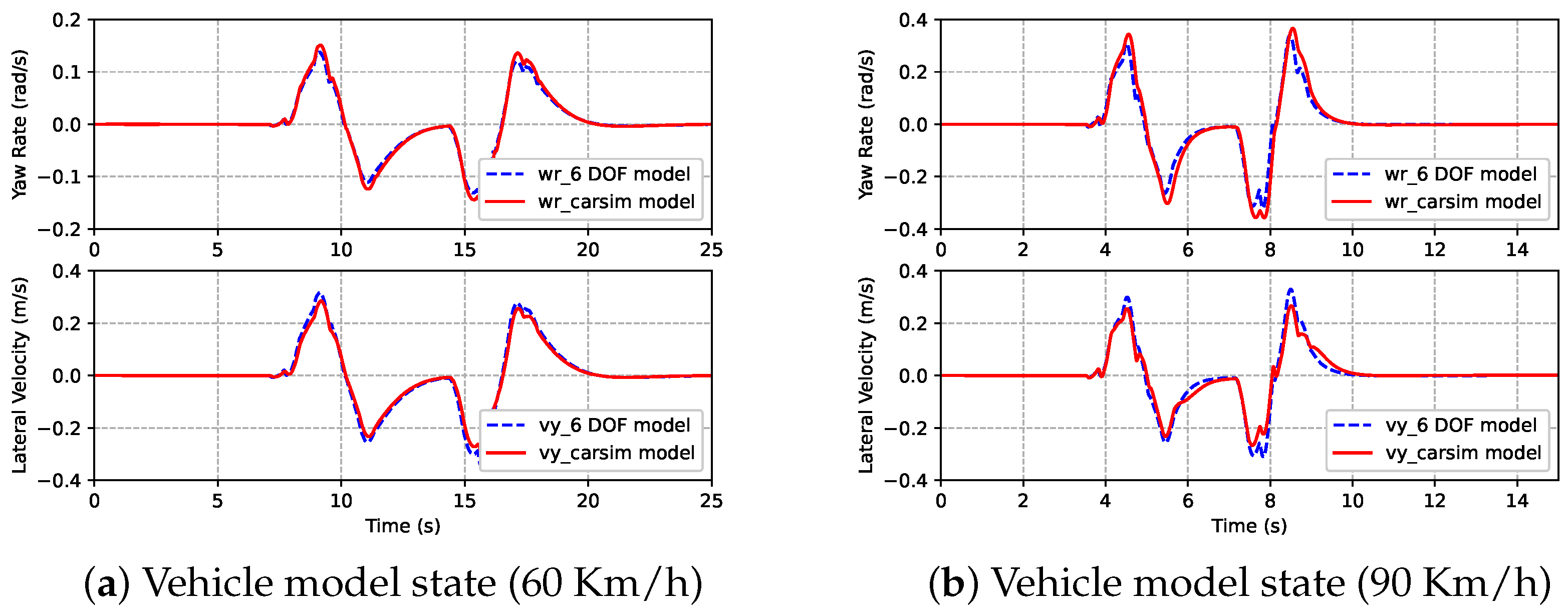
5.1. Simulation Platform and Model Verification
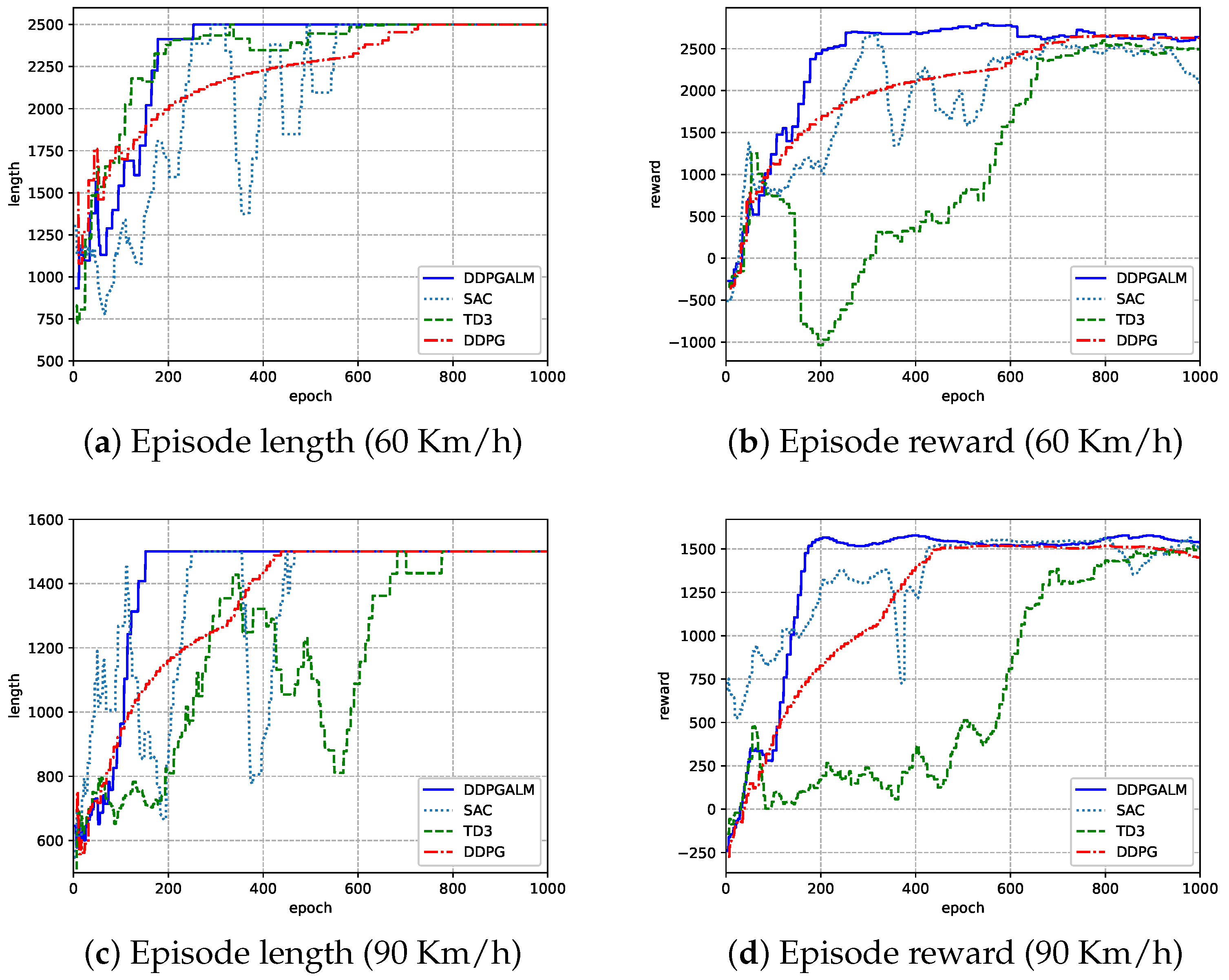
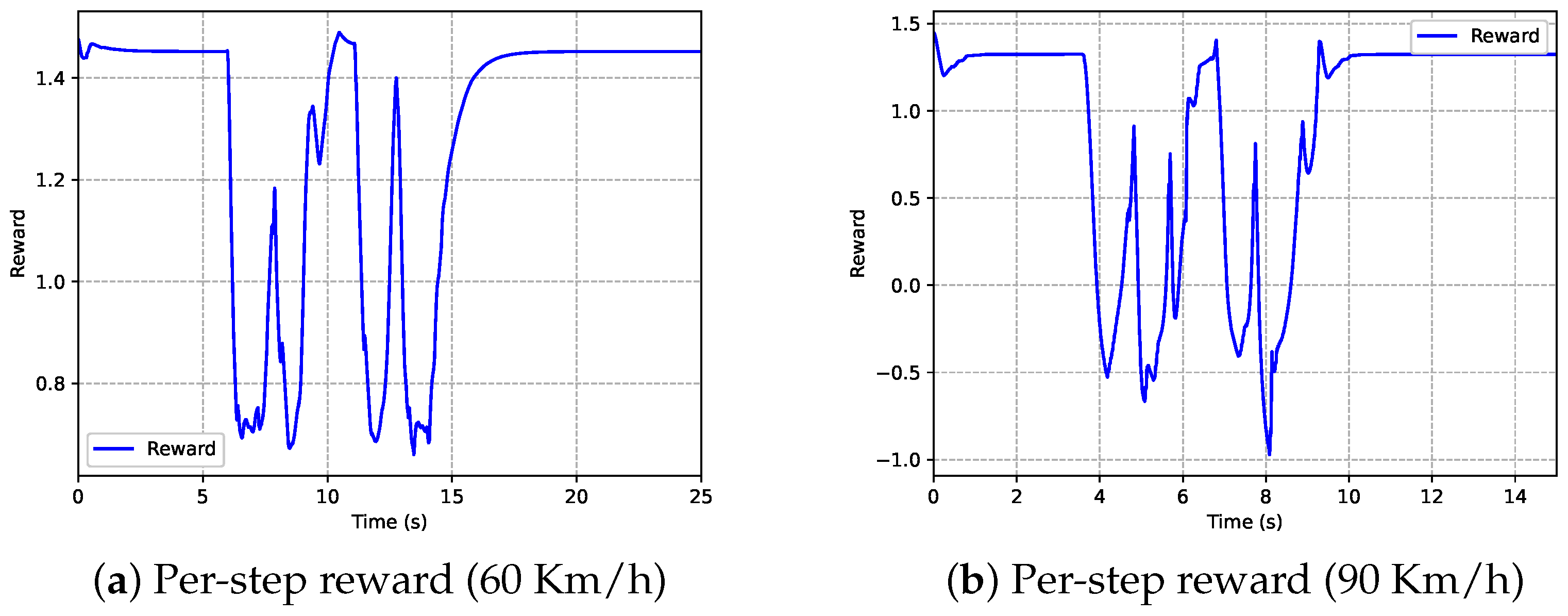
5.2. Simulation Results and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, M.; Niu, C.; Wang, Z.; Jiang, Y.; Jian, J.; Tang, X. Model and Parameter Adaptive MPC Path Tracking Control Study of Rear-Wheel-Steering Agricultural Machinery. Agriculture 2024, 14, 823. [Google Scholar] [CrossRef]
- Tan, Q.; Dai, P.; Zhang, Z.; Katupitiya, J. MPC and PSO Based Control Methodology for Path Tracking of 4WS4WD Vehicles. Appl. Sci. 2018, 8, 1000. [Google Scholar] [CrossRef]
- Zou, T.; You, Y.; Meng, H.; Chang, Y. Research on Six-Wheel Distributed Unmanned Vehicle Path Tracking Strategy Based on Hierarchical Control. Biomimetics 2022, 7, 238. [Google Scholar] [CrossRef] [PubMed]
- Hajjami, L.E.; Mellouli, E.; Žuraulis, V.; Berrada, M.; Boumhidi, I. A Robust Intelligent Controller for Autonomous Ground Vehicle Longitudinal Dynamics. Appl. Sci. 2023, 13, 501. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Z.; Shi, D.; Chu, F.; Guo, J.; Wang, J. Optimized Longitudinal and Lateral Control Strategy of Intelligent Vehicles Based on Adaptive Sliding Mode Control. World Electr. Veh. J. 2024, 15, 387. [Google Scholar] [CrossRef]
- Oh, K.; Seo, J. Development of a Sliding-Mode-Control-Based Path-Tracking Algorithm with Model-Free Adaptive Feedback Action for Autonomous Vehicles. Sensors 2023, 23, 405. [Google Scholar] [CrossRef] [PubMed]
- Shan, Y.; Zheng, B.; Chen, L.; Chen, L.; Chen, D. A Reinforcement Learning-Based Adaptive Path Tracking Approach for Autonomous Driving. IEEE Trans. Veh. Technol. 2020, 69, 10581–10595. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, H.G.; Ni, L. Improved DDPG Algorithm Based on Offline Model Pre-Training Learning. Comput. Eng. Des. 2022, 43, 1451–1458. [Google Scholar]
- Luo, Z.; Zhou, J.; Wen, G. Deep Reinforcement Learning Based Tracking Control of Unmanned Vehicle with Safety Guarantee. In Proceedings of the 2022 13th Asian Control Conference (ASCC), Jeju Island, Republic of Korea, 4–7 May 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1893–1898. [Google Scholar]
- Xiao, H.X.; Zhao, H.X.; Yang, T.J. Special Vehicle Route Optimization Strategy Based on Route Search DQN. Comput. Eng. Des. 2024, 45, 3153–3160. [Google Scholar]
- Chen, I.M.; Chan, C.Y. Deep Reinforcement Learning Based Path Tracking Controller for Autonomous Vehicle. Proc. Inst. Mech. Eng. Part J Automob. Eng. 2021, 235, 541–551. [Google Scholar] [CrossRef]
- Ning, Q.; Liu, Y.S.; Xie, L.Y. Application of SAC-Based Autonomous Vehicle Control Method. Comput. Eng. Appl. 2023, 59, 306–314. [Google Scholar]
- Ye, B.L.; Wang, X.; Li, L.X.; Wu, W.M. Vehicle Intelligent Control Method Based on Deep Reinforcement Learning PPO. Comput. Eng. 2024, 1–14. [Google Scholar] [CrossRef]
- Mnih, V. Playing Atari with Deep Reinforcement Learning. arXiv 2013, arXiv:1312.5602. [Google Scholar]
- Haarnoja, T.; Zhou, A.; Abbeel, P.; Levine, S. Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor. In Proceedings of the International Conference on Machine Learning, PMLR, Stockholm, Sweden, 10–15 July 2018; pp. 1861–1870. [Google Scholar]
- Fujimoto, S.; Hoof, H.; Meger, D. Addressing Function Approximation Error in Actor-Critic Methods. In Proceedings of the International Conference on Machine Learning, PMLR, Stockholm, Sweden, 10–15 July 2018; pp. 1587–1596. [Google Scholar]
- Lillicrap, T.P. Continuous Control with Deep Reinforcement Learning. arXiv 2015, arXiv:1509.02971. [Google Scholar]
- Hassan, I.A.; Ragheb, H.; Sharaf, A.M.; Attia, T. Reinforcement Learning for Precision Navigation: DDQN-Based Trajectory Tracking in Unmanned Ground Vehicles. In Proceedings of the 2024 14th International Conference on Electrical Engineering (ICEENG), Cairo, Egypt, 21–23 May 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 54–59. [Google Scholar]
- Li, M.; Liu, H.; Wang, H.; Xia, M. Trustworthy Dynamic Object Tracking Using Deep Reinforcement Learning with the Self-Attention Mechanism. In Proceedings of the 2023 IEEE 19th International Conference on Automation Science and Engineering (CASE), Auckland, New Zealand, 26–30 August 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6. [Google Scholar]
- Srikonda, S.; Norris, W.R.; Nottage, D.; Soylemezoglu, A. Deep Reinforcement Learning for Autonomous Dynamic Skid Steer Vehicle Trajectory Tracking. Robotics 2022, 11, 95. [Google Scholar] [CrossRef]
- Gu, S.; Yang, L.; Du, Y.; Chen, G.; Walter, F.; Wang, J.; Knoll, A. A Review of Safe Reinforcement Learning: Methods, Theory and Applications. arXiv 2022, arXiv:2205.10330. [Google Scholar] [CrossRef] [PubMed]
- Carr, S.; Jansen, N.; Junges, S.; Topcu, U. Safe Reinforcement Learning via Shielding under Partial Observability. In Proceedings of the AAAI Conference on Artificial Intelligence, Washington, DC, USA, 7–14 February 2023; Volume 37, pp. 14748–14756. [Google Scholar]
- Simão, T.D.; Suilen, M.; Jansen, N. Safe Policy Improvement for POMDPs via Finite-State Controllers. In Proceedings of the AAAI Conference on Artificial Intelligence, Washington, DC, USA, 7–14 February 2023; Volume 37, pp. 15109–15117. [Google Scholar]
- Park, J.; Seo, Y.; Shin, J.; Lee, H.; Abbeel, P.; Lee, K. SURF: Semi-Supervised Reward Learning with Data Augmentation for Feedback-Efficient Preference-Based Reinforcement Learning. arXiv 2022, arXiv:2203.10050. [Google Scholar]
- Cohen, M.H.; Belta, C. Safe Exploration in Model-Based Reinforcement Learning Using Control Barrier Functions. Automatica 2023, 147, 110684. [Google Scholar] [CrossRef]
- ISO 3888-1:1999; Passenger Cars: Test Tracks for a Severe Lane-Change Manoeuvre: Part 1: Double Lane-Change. International Organisation for Standardization: London, UK, 2018.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Reinforcement Learning Parameter Values for Different Methods | |||
|---|---|---|---|---|
| SAC | TD3 | DDPG | DDPGALM | |
| Sampling time/s | 0.01 | 0.01 | 0.01 | 0.01 |
| Batch size | 256 | 256 | 256 | 256 |
| Discount factor | 0.99 | 0.99 | 0.99 | 0.99 |
| Initial exploration rate | 0.2 | 0.2 | 0.2 | 0.2 |
| Final exploration rate | 0.01 | 0.01 | 0.01 | 0.01 |
| Critic learning rate | ||||
| Actor learning rate | ||||
| Soft update coefficient | ||||
| Entropy coefficient | 0.2 | – | – | – |
| Target policy noise | – | 0.2 | – | – |
| Delayed update frequency | – | 2 | – | – |
| Initial penalty factor | – | – | – | 0.01 |
| Initial Lagrange multiplier | – | – | – | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Wang, M.; Zhao, H. Vehicle Lateral Control Based on Augmented Lagrangian DDPG Algorithm. Appl. Sci. 2025, 15, 5463. https://doi.org/10.3390/app15105463
Li Z, Wang M, Zhao H. Vehicle Lateral Control Based on Augmented Lagrangian DDPG Algorithm. Applied Sciences. 2025; 15(10):5463. https://doi.org/10.3390/app15105463
Chicago/Turabian StyleLi, Zhi, Meng Wang, and Haitao Zhao. 2025. "Vehicle Lateral Control Based on Augmented Lagrangian DDPG Algorithm" Applied Sciences 15, no. 10: 5463. https://doi.org/10.3390/app15105463
APA StyleLi, Z., Wang, M., & Zhao, H. (2025). Vehicle Lateral Control Based on Augmented Lagrangian DDPG Algorithm. Applied Sciences, 15(10), 5463. https://doi.org/10.3390/app15105463