
Design and Implementation of a Vehicular Visible Light Communication System Using LED Lamps for Driving Dynamics Data Exchange in Tunnels



Abstract
:1. Introduction
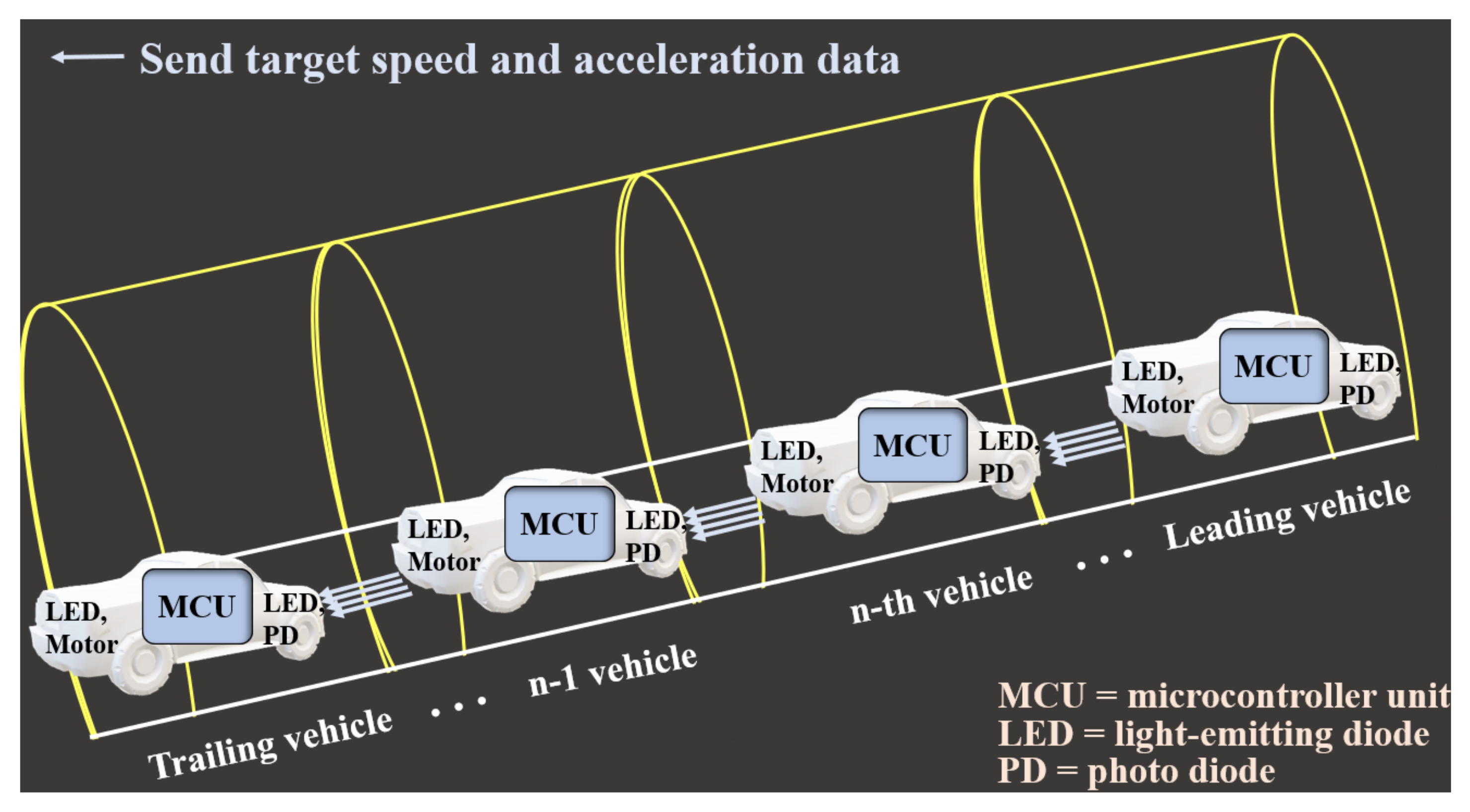
- We propose and implement a vehicular VLC system designed to establish an expandable VLC-based chain network for the real-time exchange of driving dynamics data (e.g., target speed and acceleration) among consecutive vehicles in tunnel environments. The system is tailored for GPS-denied scenarios, where limited visibility and poor situational awareness increase the risk of chain collisions. The system architecture is validated through experimental scenarios representative of real-world tunnel hazards, including sudden braking and unexpected congestion.
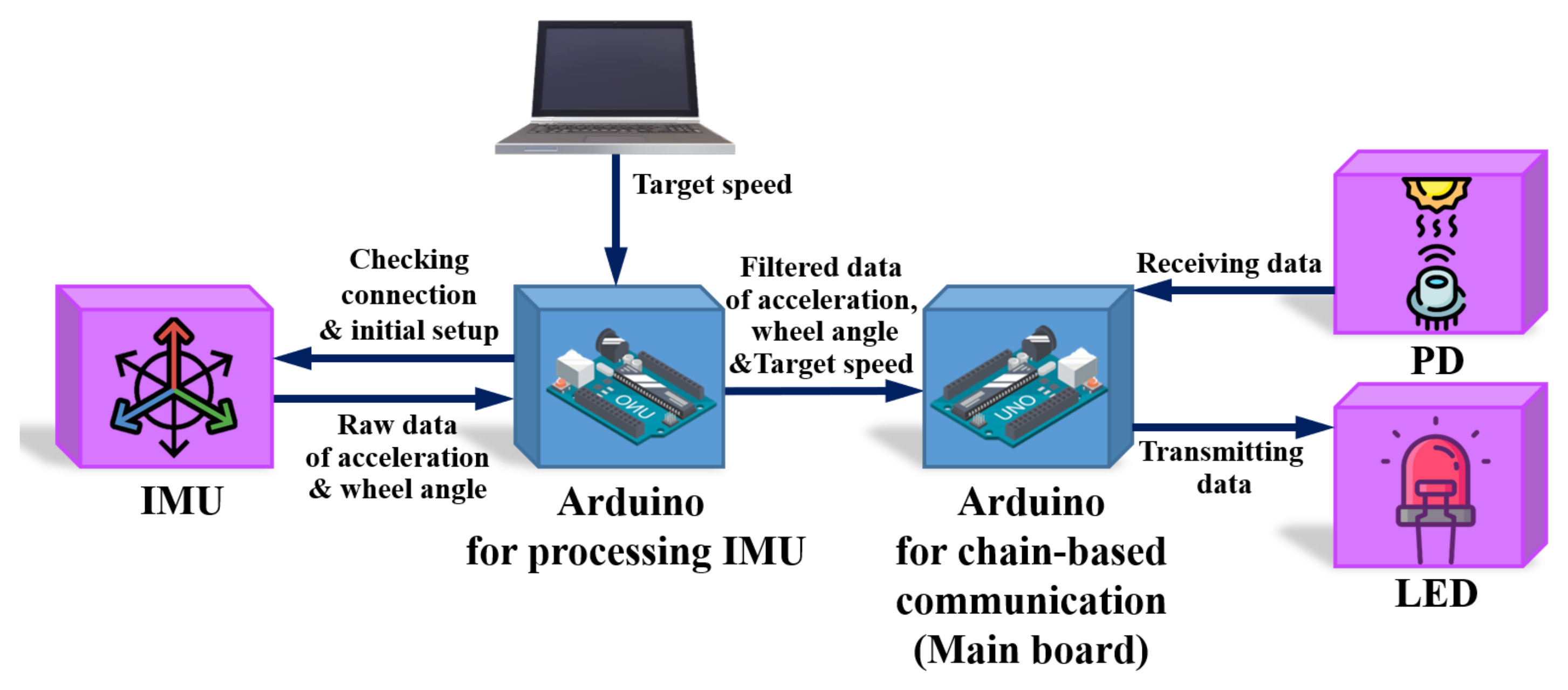
- To ensure reliable optical links even during curved driving, the system incorporates an adaptive LED beam alignment mechanism that dynamically adjusts the transmitter’s orientation based on yaw angle, derived from a nine-axis inertial measurement unit (IMU). This closed-loop control significantly enhances communication stability in conditions where traditional fixed-beam VLC systems are prone to misalignment.
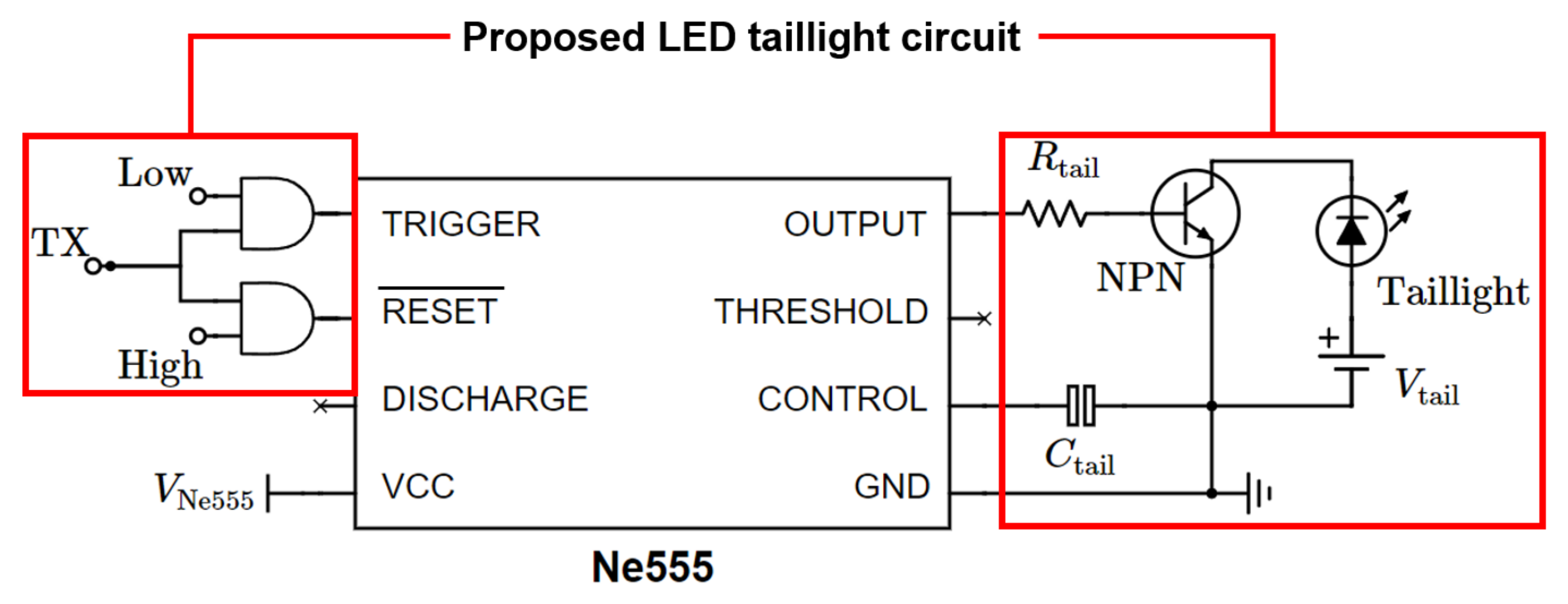
- The proposed system can be practically deployable in existing vehicles with minimal hardware modification, as it reuses built-in LED tail-lights as VLC transmitters and requires only low-cost embedded circuitry. This makes the approach both cost-effective and scalable, offering a feasible path toward the real-world adoption of VLC-based V2V communication.
2. System Description
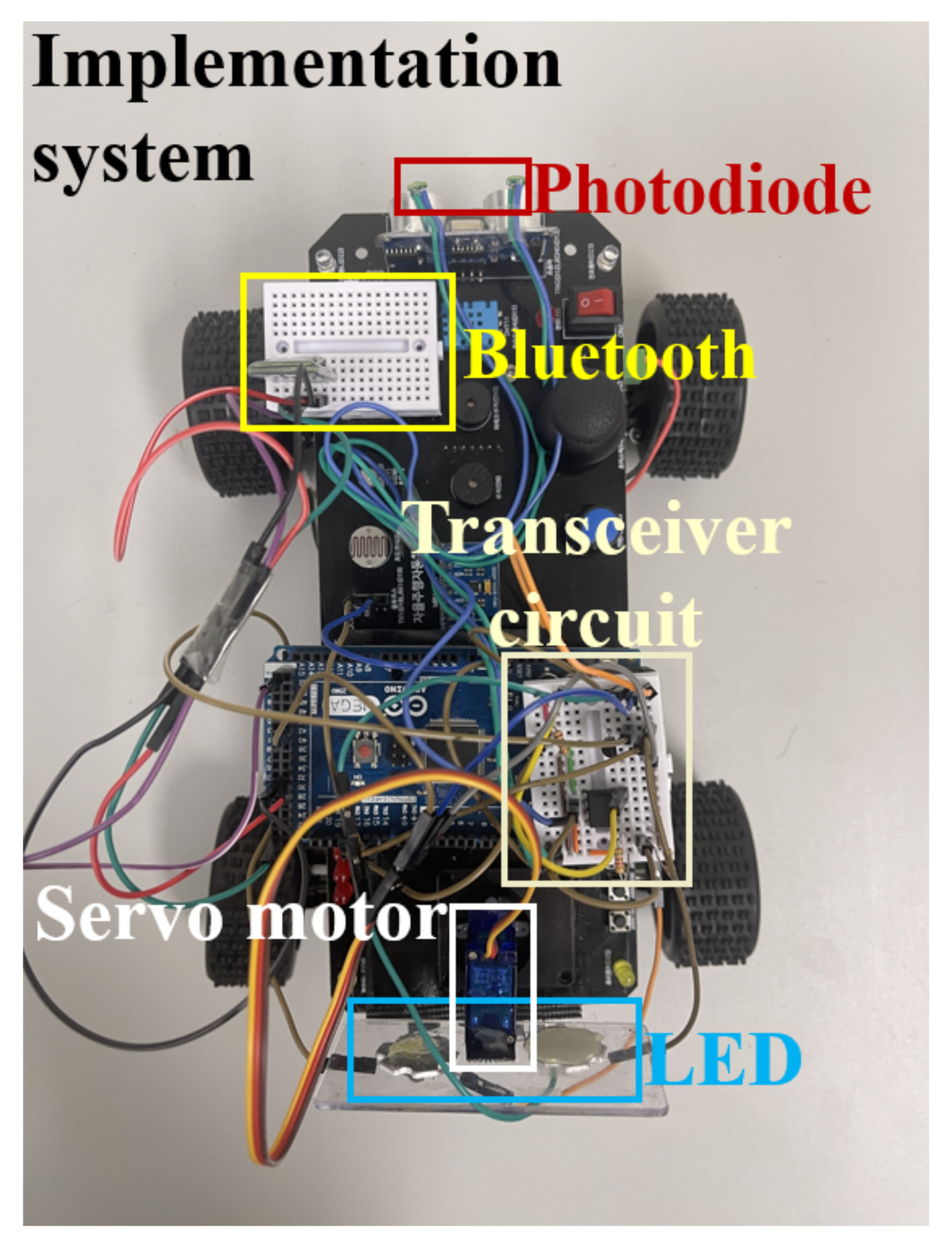
3. Implementation of Vehicular VLC System
3.1. Main Board
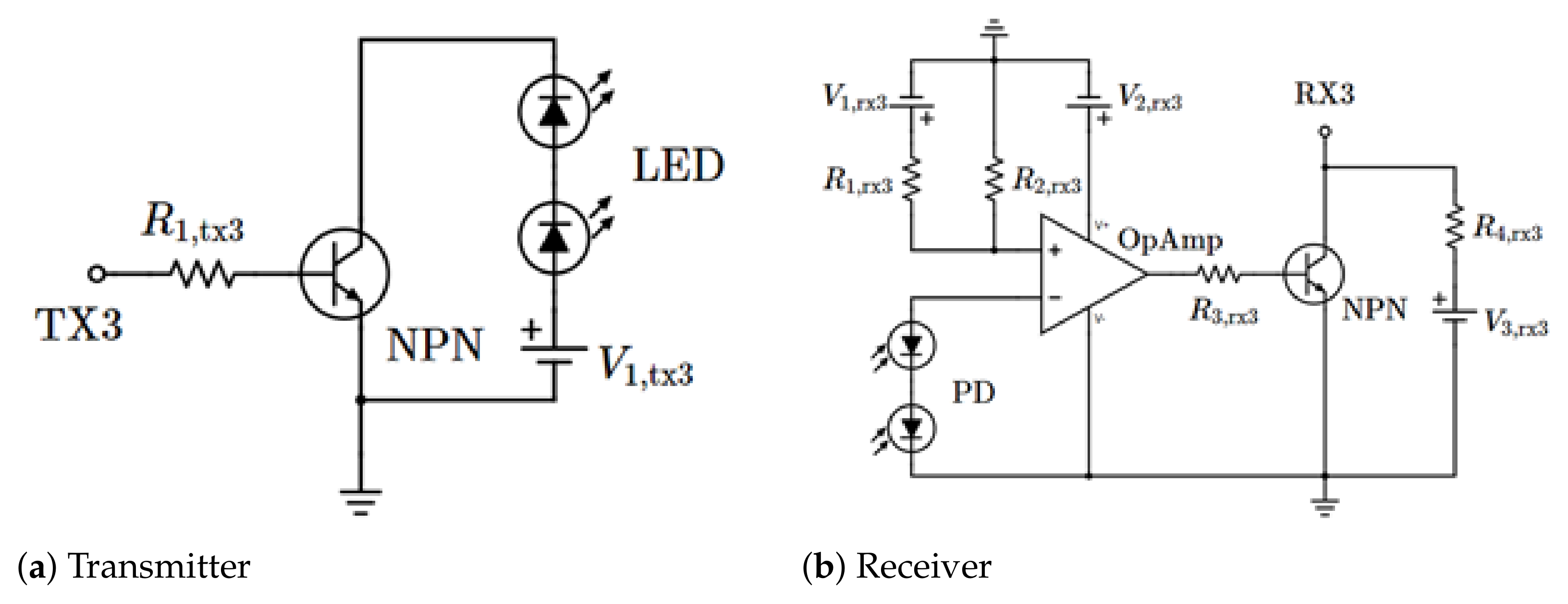
3.2. Transmitter and Receiver
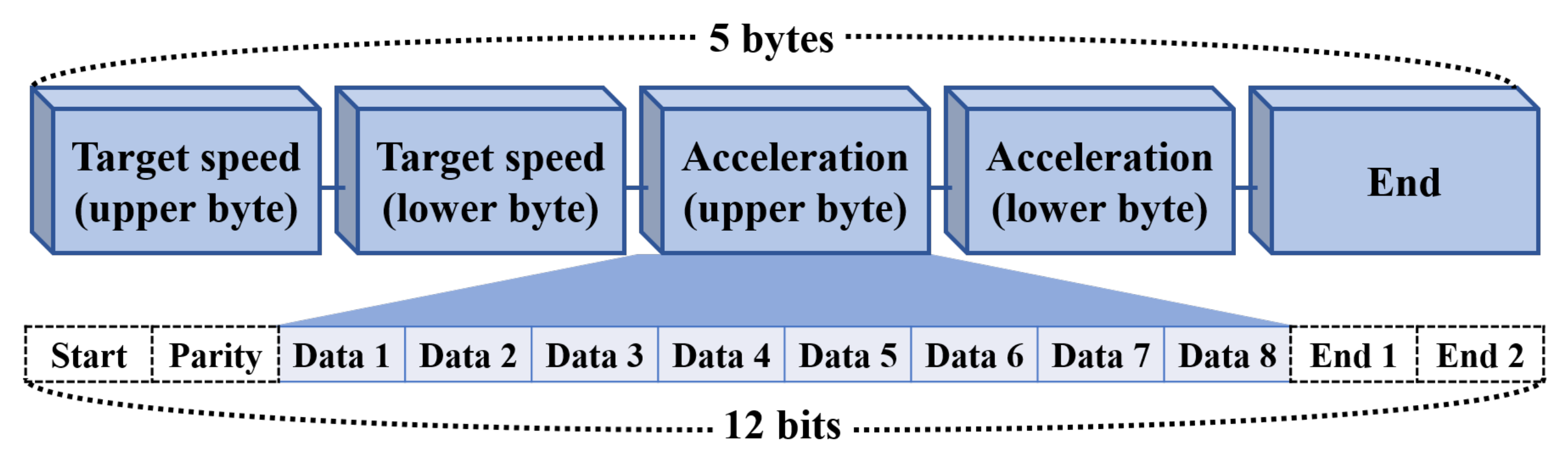
3.3. Packet Design and Timing Requirements for Vehicular VLC System
3.4. Adaptive LED Beam Alignment Mechanism
| Algorithm 1 Adaptive LED beam alignment mechanism. |
|
3.5. Integration of the Proposed Vehicular VLC System to Actual Vehicles
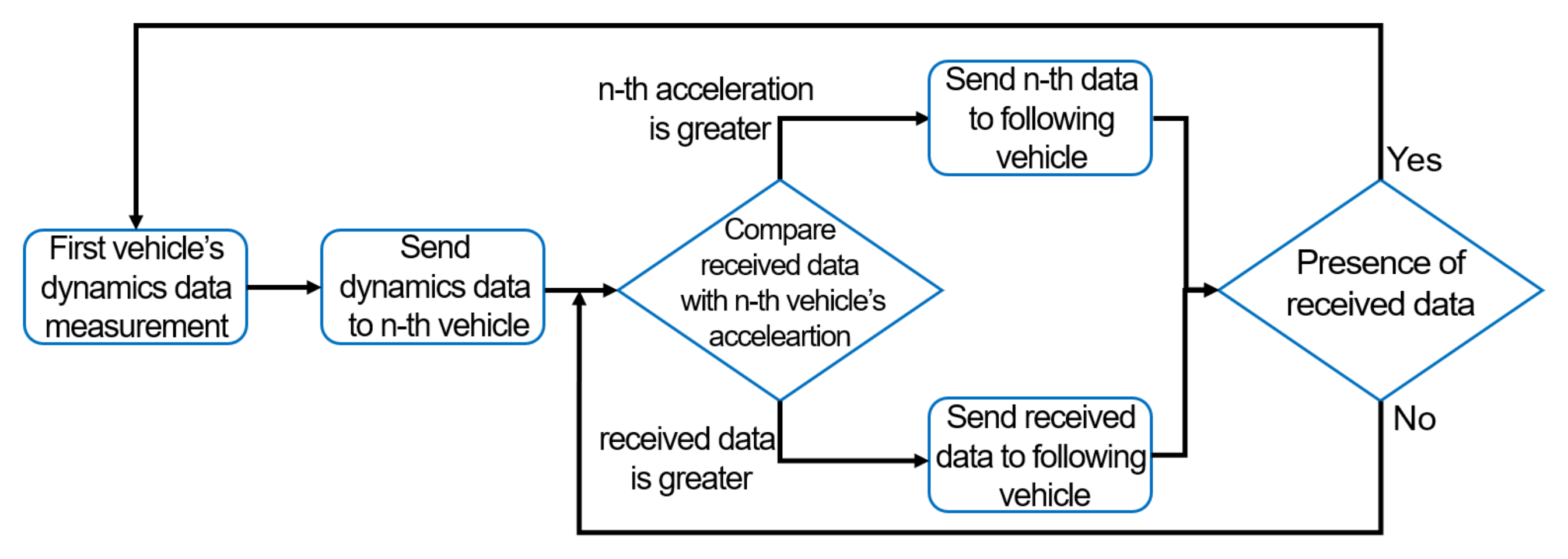
3.6. Proposed Mechanism of Data Exchange in a VLC-Based Chain Network in the Tunnel
4. Experimental Results
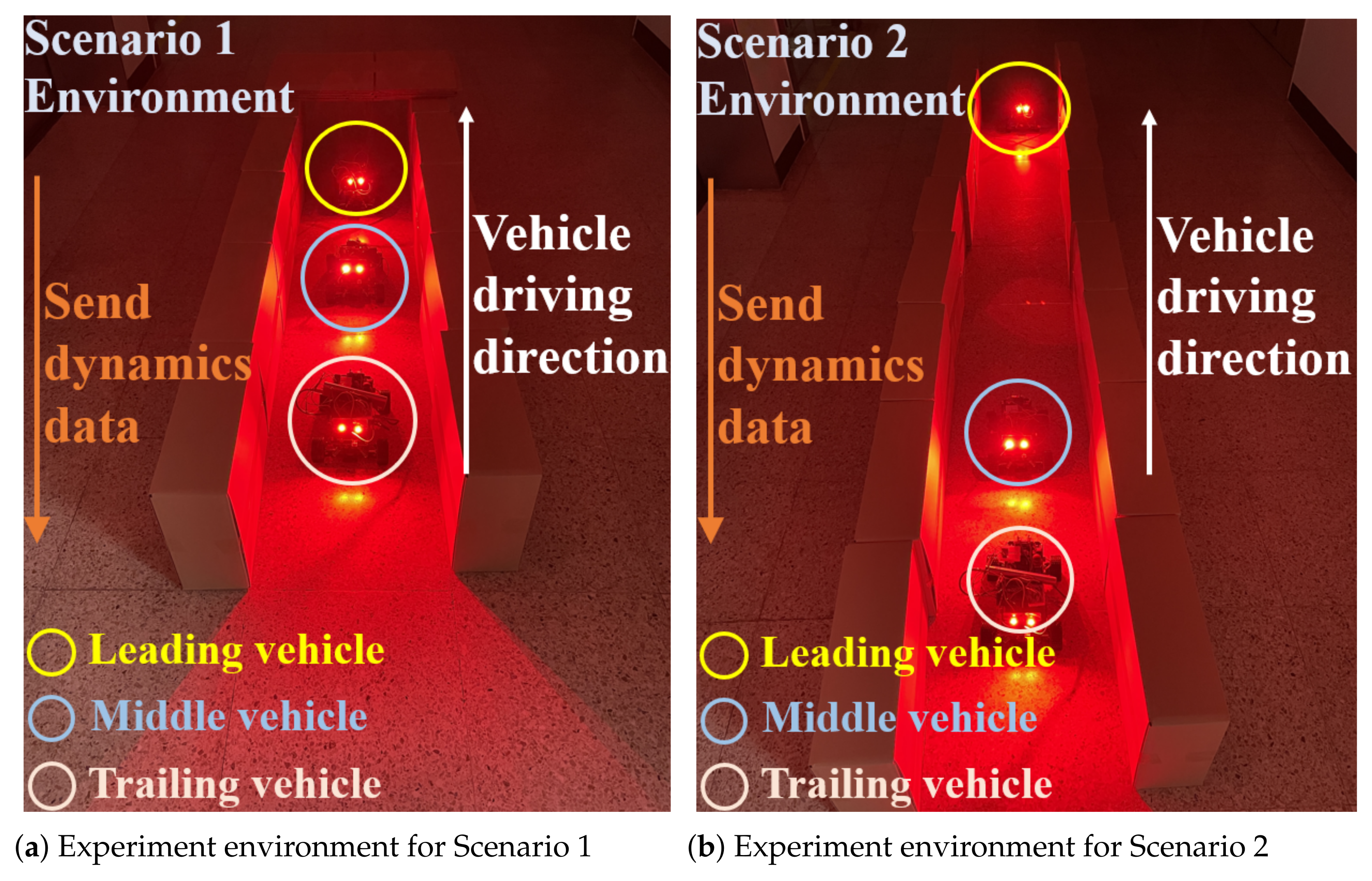
4.1. Experimental Results in Scenario 1
4.2. Experimental Results in Scenario 2
4.3. Experimental Results of the Proposed Vehicular VLC System Under Various Scenarios
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gyawali, S.; Xu, S.; Qian, Y.; Hu, R.Q. Challenges and Solutions for Cellular Based V2X Communications. IEEE Commun. Surv. Tutor. 2021, 23, 222–255. [Google Scholar] [CrossRef]
- Clancy, J.; Mullins, D.; Deegan, B.; Horgan, J.; Ward, E.; Eising, C.; Denny, P.; Jones, E.; Glavin, M. Wireless Access for V2X Communications: Research, Challenges and Opportunities. IEEE Commun. Surv. Tutor. 2024, 26, 2082–2119. [Google Scholar] [CrossRef]
- Abboud, K.; Omar, H.A.; Zhuang, W. Interworking of DSRC and Cellular Network Technologies for V2X Communications: A Survey. IEEE Trans. Veh. Technol. 2016, 65, 9457–9470. [Google Scholar] [CrossRef]
- Garcia, M.H.C.; Molina-Galan, A.; Boban, M.; Gozalvez, J.; Coll-Perales, B.; Şahin, T.; Kousaridas, A. A Tutorial on 5G NR V2X Communications. IEEE Commun. Surv. Tutor. 2021, 23, 1972–2026. [Google Scholar] [CrossRef]
- Memedi, A.; Dressler, F. Vehicular Visible Light Communications: A Survey. IEEE Commun. Surv. Tutor. 2021, 23, 161–181. [Google Scholar] [CrossRef]
- Song, Y.; Mo, R.; Zhang, P.; Wang, C.; Sheng, Z.; Sun, Y.; Yang, Y. VehicleTalk: Lightweight V2V Network Enabled by Optical Wireless Communication and Sensing. In Proceedings of the 2024 IEEE 99th Vehicular Technology Conference (VTC2024-Spring), Singapore, 24–27 June 2024; pp. 1–5. [Google Scholar]
- Yoo, J.-H.; Jang, J.-S.; Kwon, J.K.; Kim, H.C.; Song, D.W.; Jung, S.Y. Demonstration of Vehicular Visible Light Communication Based on LED Headlamp. Int. J. Automot. Technol. 2016, 17, 347–352. [Google Scholar] [CrossRef]
- Janjua, J.I.; Khan, T.A.; Khan, M.S.; Nadeem, M. Li-Fi Communications in Smart Cities for Truly Connected Vehicles. In Proceedings of the 2021 2nd International Conference On Smart Cities, Automation & Intelligent Computing Systems (ICON-SONICS), Tangerang, Indonesia, 12–13 October 2021; pp. 1–6. [Google Scholar]
- Torres-Zapata, E.; Guerra, V.; Rabadan, J.; Perez-Jimenez, R.; Luna-Rivera, J.M. Vehicular Communications in Tunnels Using VLC. In Proceedings of the 2019 15th International Conference on Telecommunications (ConTEL), Graz, Austria, 3–5 July 2019; pp. 1–6. [Google Scholar]
- Ramzi, S.R.; Hameed, S.M.; Sabri, A.A. VLC Performance in Underground Vehicular Tunnels. Opt. Continuum 2024, 3, 1990–2005. [Google Scholar] [CrossRef]
- Chang, T.-H.; Wang, L.-S.; Chang, F.-R. A solution to the ill-conditioned GPS positioning problem in an urban environment. IEEE Trans. Intell. Transp. Syst. 2009, 10, 135–145. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, C.; Wang, R.; Li, W.; Zheng, Y. Classification of Incidents Influencing on Driving Safety in Freeway Tunnel Impact Area and the Corresponding Responses. In Proceedings of the 2019 6th International Conference on Frontiers of Industrial Engineering (ICFIE), London, UK, 10–12 September 2019; pp. 73–78. [Google Scholar]
- Takai, I.; Harada, T.; Andoh, M.; Yasutomi, K.; Kagawa, K.; Kawahito, S. Optical Vehicle-to-Vehicle Communication System Using LED Transmitter and Camera Receiver. IEEE Photonics J. 2014, 6, 1–14. [Google Scholar] [CrossRef]
- Kim, Y.H.; Cahyadi, W.A.; Chung, Y.H. Experimental Demonstration of VLC-Based Vehicle-to-Vehicle Communications Under Fog Conditions. IEEE Photonics J. 2015, 7, 1–9. [Google Scholar] [CrossRef]
- Turan, B.; Narmanlıoğlu, O.; Ergen, S.C.; Uysal, M. Physical Layer Implementation of Standard Compliant Vehicular VLC. In Proceedings of the 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–5. [Google Scholar]
- Nguyen, T.; Islam, A.; Jang, Y.M. Region-of-Interest Signaling Vehicular System Using Optical Camera Communications. IEEE Photonics J. 2017, 9, 1–20. [Google Scholar] [CrossRef]
- Kim, B.W.; Jung, S.-Y. Vehicle Positioning Scheme Using V2V and V2I Visible Light Communications. In Proceedings of the 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), 15–18 May 2016; pp. 1–5.
- Nachimuthu, S.; Pooranachandran, S.; Sharomena Aarthi, B. Design and Implementation of a Vehicle to Vehicle Communication System Using Li-Fi Technology. Int. Res. J. Eng. Technol. 2016, 3, 1–4. [Google Scholar]
- Siddiqi, K.; Raza, A.D.; Muhammad, S.S. Visible light communication for V2V intelligent transport system. In Proceedings of the 2016 International Conference on Broadband Communications for Next Generation Networks and Multimedia Applications (CoBCom), Graz, Austria, 14–16 September 2016; pp. 1–4. [Google Scholar]
- Matus, V.; Azurdia-Meza, C.A.; Céspedes, S.; Ortega, P.; Montejo-Sánchez, S.; Rojas, J.; Soto, I. Implementation of a Low-Cost Vehicular VLC System and CAN Bus Interface. In Proceedings of the 2018 11th International Symposium on Communication Systems, Networks & Digital Signal Processing (CSNDSP), Budapest, Hungary, 18–20 July 2018; pp. 1–5. [Google Scholar]
- Meucci, M.; Seminara, M.; Nawaz, T.; Caputo, S.; Mucchi, L.; Catani, J. Bidirectional Vehicle-to-Vehicle Communication System Based on VLC: Outdoor Tests and Performance Analysis. IEEE Trans. Intell. Transp. Syst. 2022, 23, 11465–11475. [Google Scholar] [CrossRef]
- Yahia, S.; Meraihi, Y.; Ramdane-Cherif, A.; Ho, T.D.; Eldeeb, H.B. Enhancement of vehicular visible light communication using spherical detector and custom lens combinations. IEEE Access 2023, 11, 21600–21611. [Google Scholar] [CrossRef]
- Ashfaq, B.N.; Tettey, D.K.; Uysal, M. FPGA-Based Implementation and Experimental Demonstration of a Vehicular VLC System. In Proceedings of the 2023 IEEE Virtual Conference on Communications (VCC), New York, NY, USA, 28–30 November 2023; pp. 282–287. [Google Scholar]
- Tettey, D.K.; Elamassie, M.; Uysal, M. Implementation of Software-Defined Adaptive DCO-OFDM for Vehicular Visible Light Communication. In Proceedings of the 2023 2nd International Conference on 6G Networking (6GNet), Paris, France, 18–20 October 2023; pp. 1–3. [Google Scholar]
- Milanés, V.; Shladover, S.E.; Spring, J.; Nowakowski, C.; Kawazoe, H.; Nakamura, M. Cooperative adaptive cruise control in real traffic situations. IEEE Trans. Intell. Transp. Syst. 2013, 15, 296–305. [Google Scholar] [CrossRef]
- Beguni, C.; Căilean, A.-M.; Avătămăniței, S.-A.; Potorac, A.-D.; Zadobrischi, E.; Dimian, M. Increasing Vehicular Visible Light Communications Range Based on LED Current Overdriving and Variable Pulse Position Modulation: Concept and Experimental Validation. Sensors 2023, 23, 3656. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Jin, H.; Wu, W.; Yang, M.; Wang, Q.; Pei, Y. Path Loss and Auxiliary Communication Analysis of VANET in Tunnel Environments. Symmetry 2023, 15, 1230. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comparison Criteria | Cost | Communication Method | Scalability |
|---|---|---|---|
| Proposed vehicular VLC system |
|
|
|
| Vehicular VLC system and CAN bus interface [20] |
|
|
|
| Vehicular optical wireless communication system [26] |
|
|
|
| RF-based tunnel communication system [27] |
|
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Woo, Y.; Park, Y.; Lim, H.; Song, Y. Design and Implementation of a Vehicular Visible Light Communication System Using LED Lamps for Driving Dynamics Data Exchange in Tunnels. Appl. Sci. 2025, 15, 5392. https://doi.org/10.3390/app15105392
Woo Y, Park Y, Lim H, Song Y. Design and Implementation of a Vehicular Visible Light Communication System Using LED Lamps for Driving Dynamics Data Exchange in Tunnels. Applied Sciences. 2025; 15(10):5392. https://doi.org/10.3390/app15105392
Chicago/Turabian StyleWoo, Yongtaek, Yeongho Park, Hyojin Lim, and Yujae Song. 2025. "Design and Implementation of a Vehicular Visible Light Communication System Using LED Lamps for Driving Dynamics Data Exchange in Tunnels" Applied Sciences 15, no. 10: 5392. https://doi.org/10.3390/app15105392
APA StyleWoo, Y., Park, Y., Lim, H., & Song, Y. (2025). Design and Implementation of a Vehicular Visible Light Communication System Using LED Lamps for Driving Dynamics Data Exchange in Tunnels. Applied Sciences, 15(10), 5392. https://doi.org/10.3390/app15105392