
A Time-Segmented SAI-Krylov Subspace Approach for Large-Scale Transient Electromagnetic Forward Modeling


Abstract
1. Introduction
2. Forward Modeling Principle
2.1. Governing Equation
2.2. Large-Scale SAI-Krylov Algorithm
| Algorithm 1 Constructing reduced-order basis and projection matrix |
| Input: , , |
| 2 |
| 2. |
| Output: , |
| Algorithm 2 Preconditioned conjugate gradient method |
| Input |
| Output |
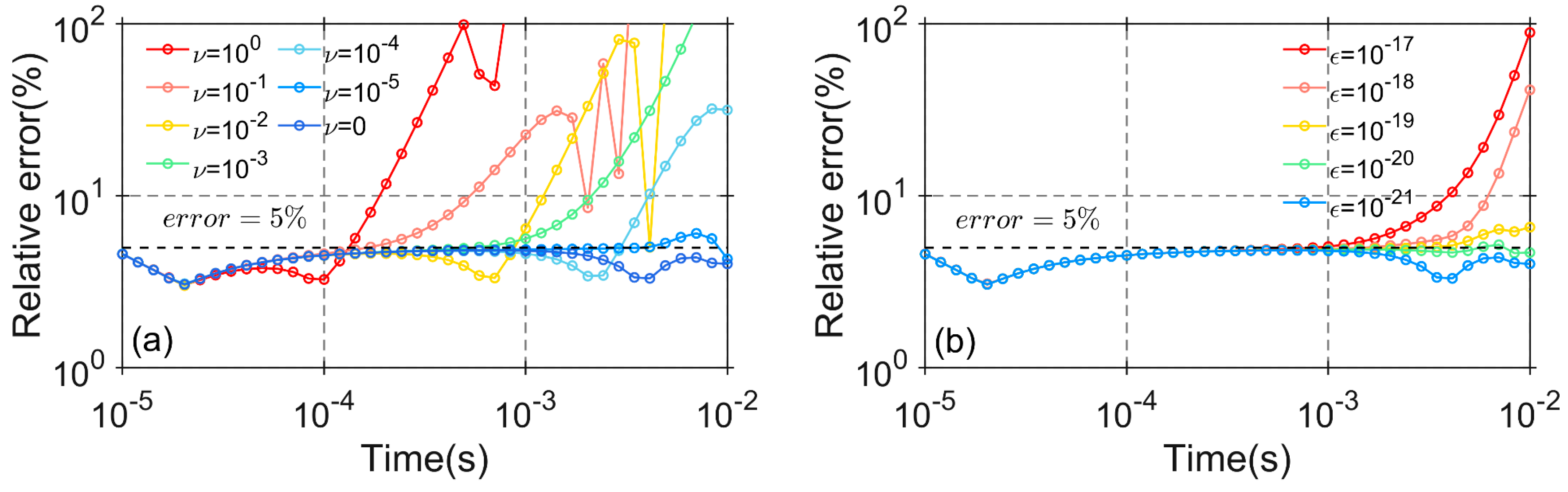
2.3. The Selection of the Initial Value and Tolerance for the PCG
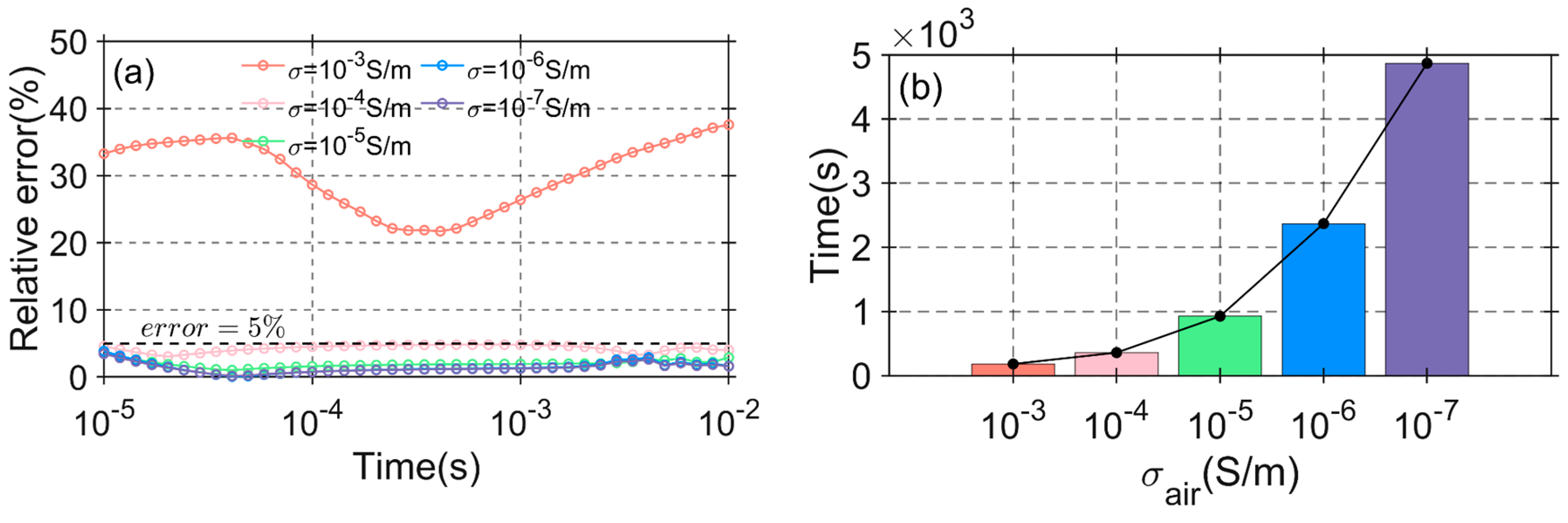
2.4. The Effect of Air Conductivity on the Algorithm
2.5. The Strategy of Time Division
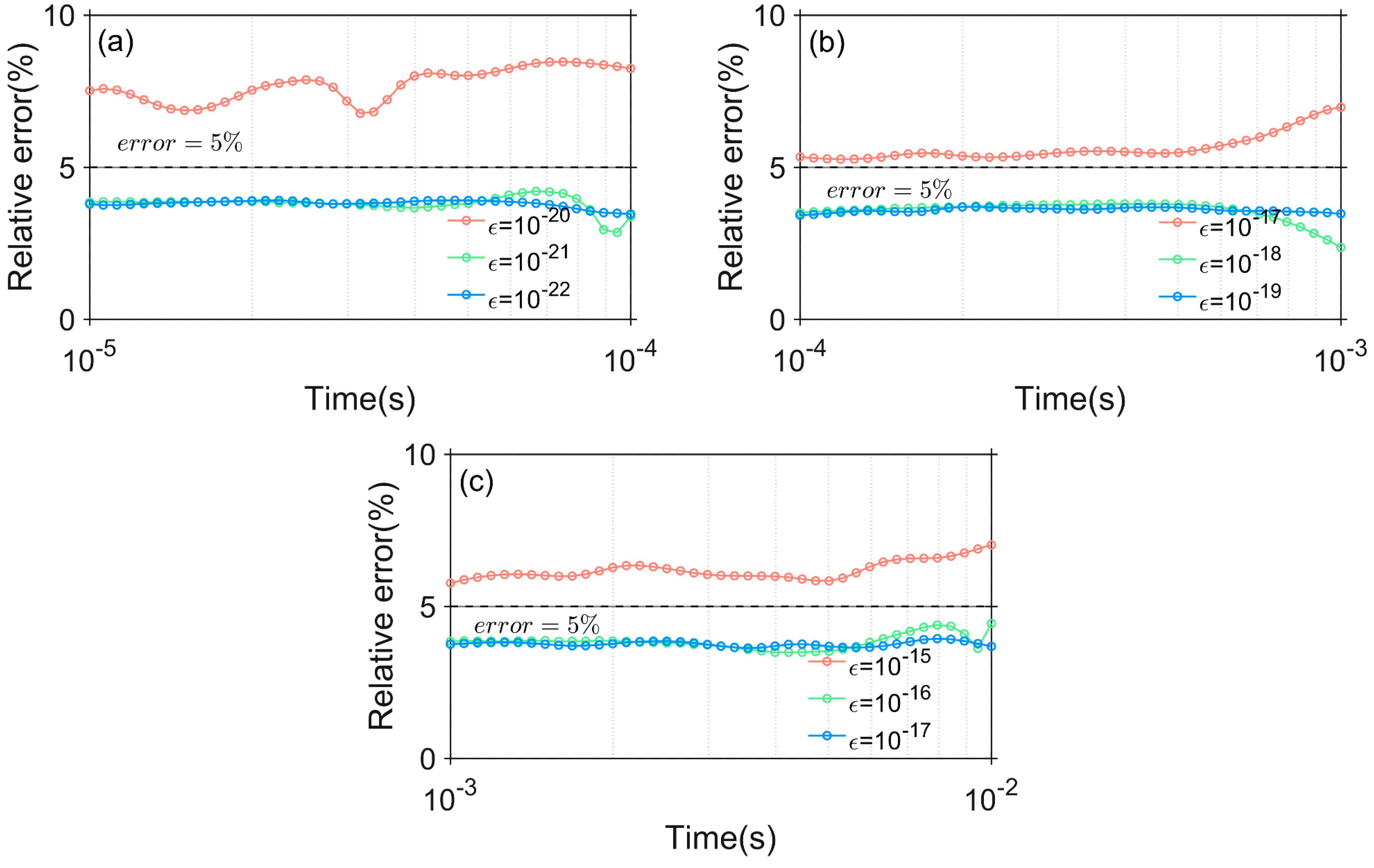
2.6. Optimal Tolerance ϵ and Relaxation Factor ω in Different Time Intervals
2.7. Comparison of Computational Performance
3. Numerical Experiments
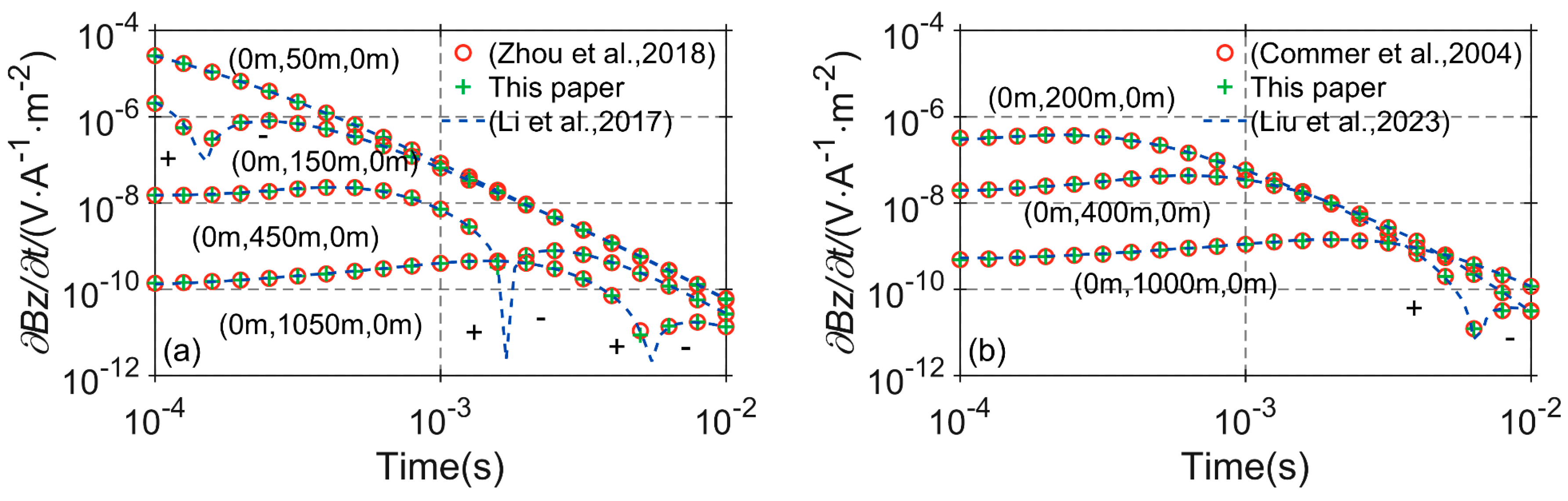
3.1. Layer Model
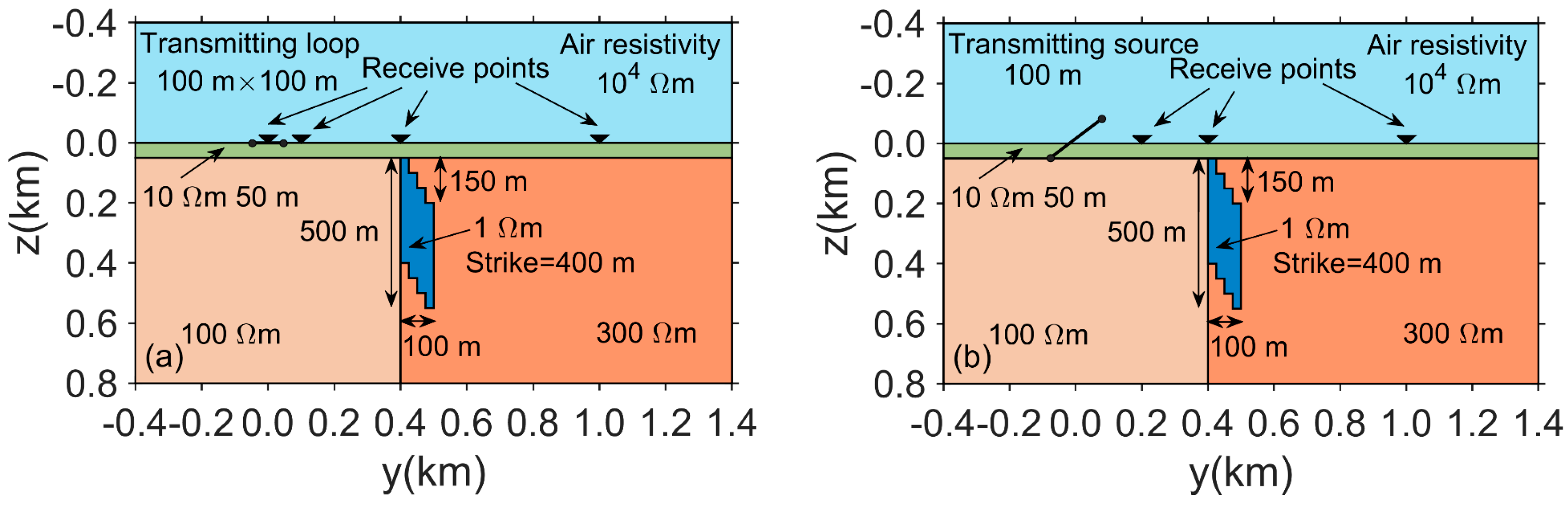
3.2. Three-Dimensional Vertical Contact Model
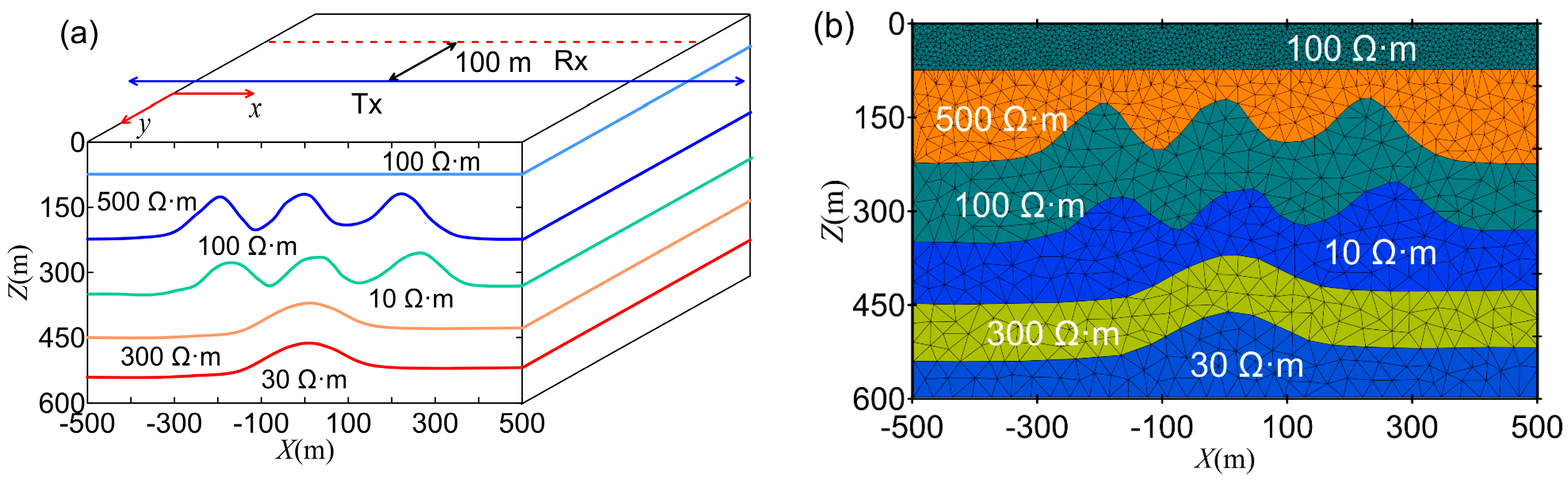
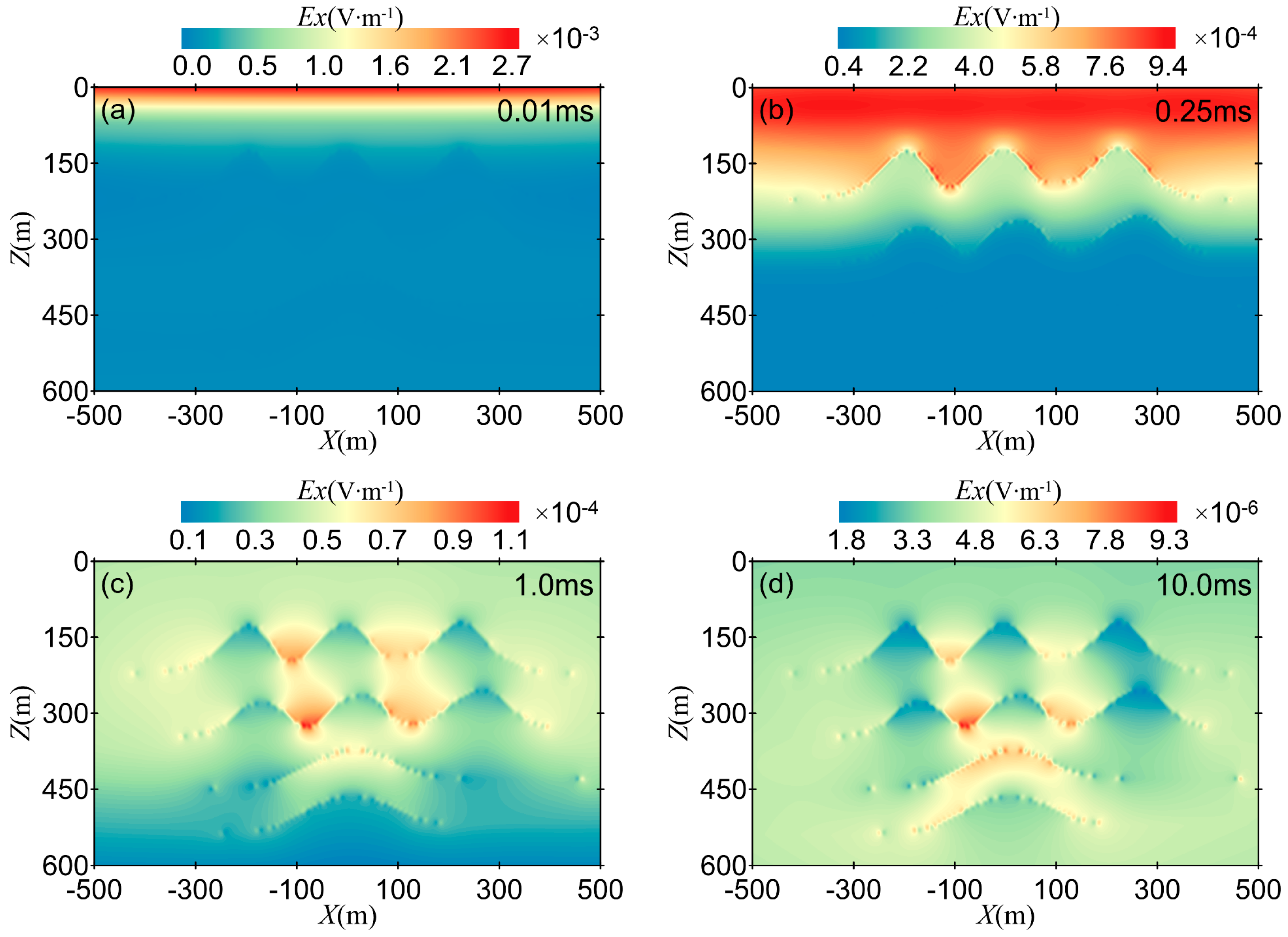
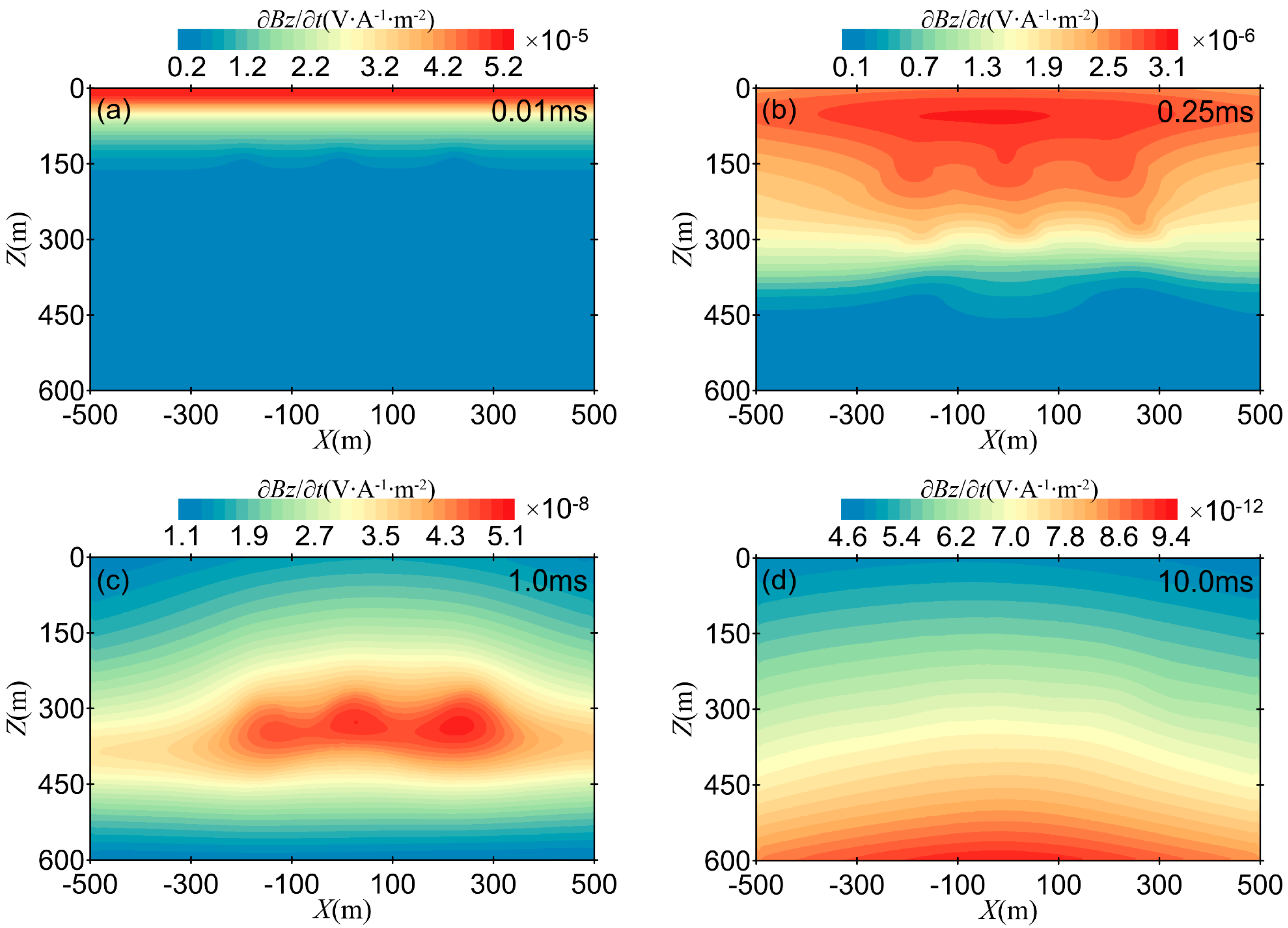
3.3. Large-Scale Undulating Stratigraphy Model
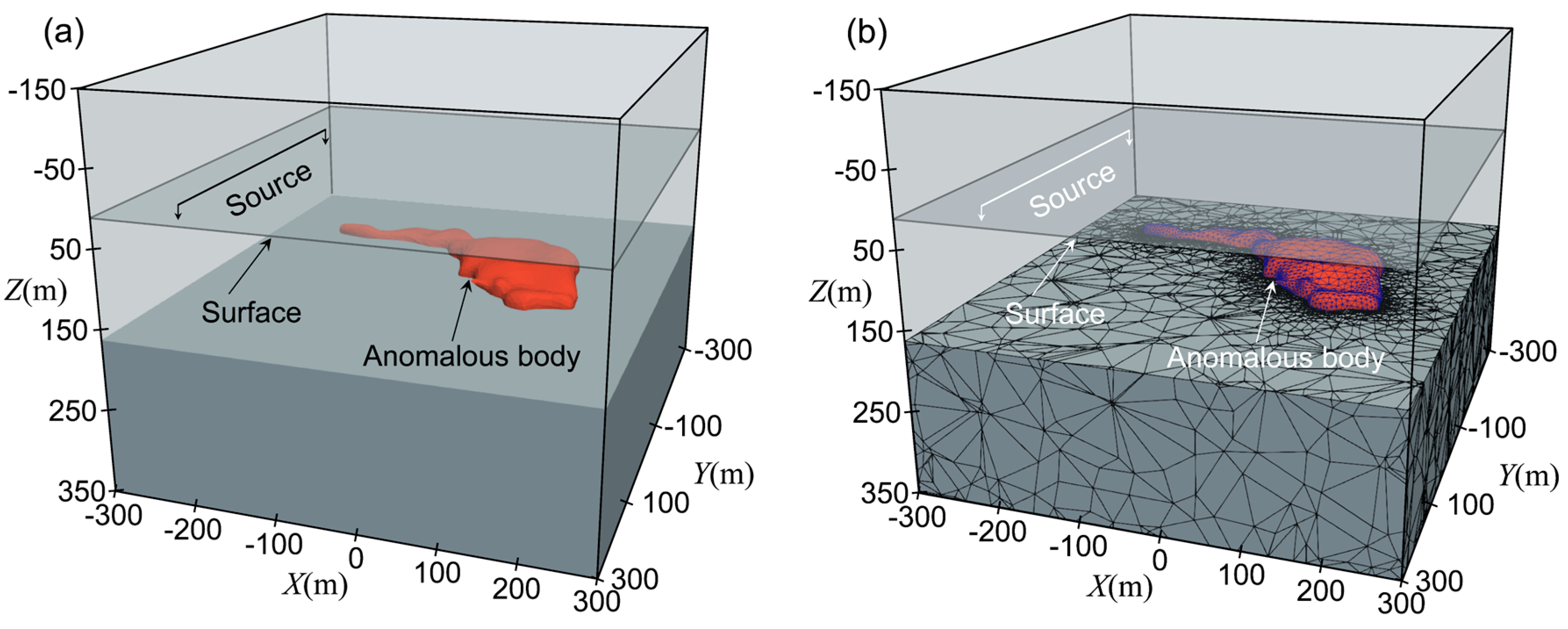
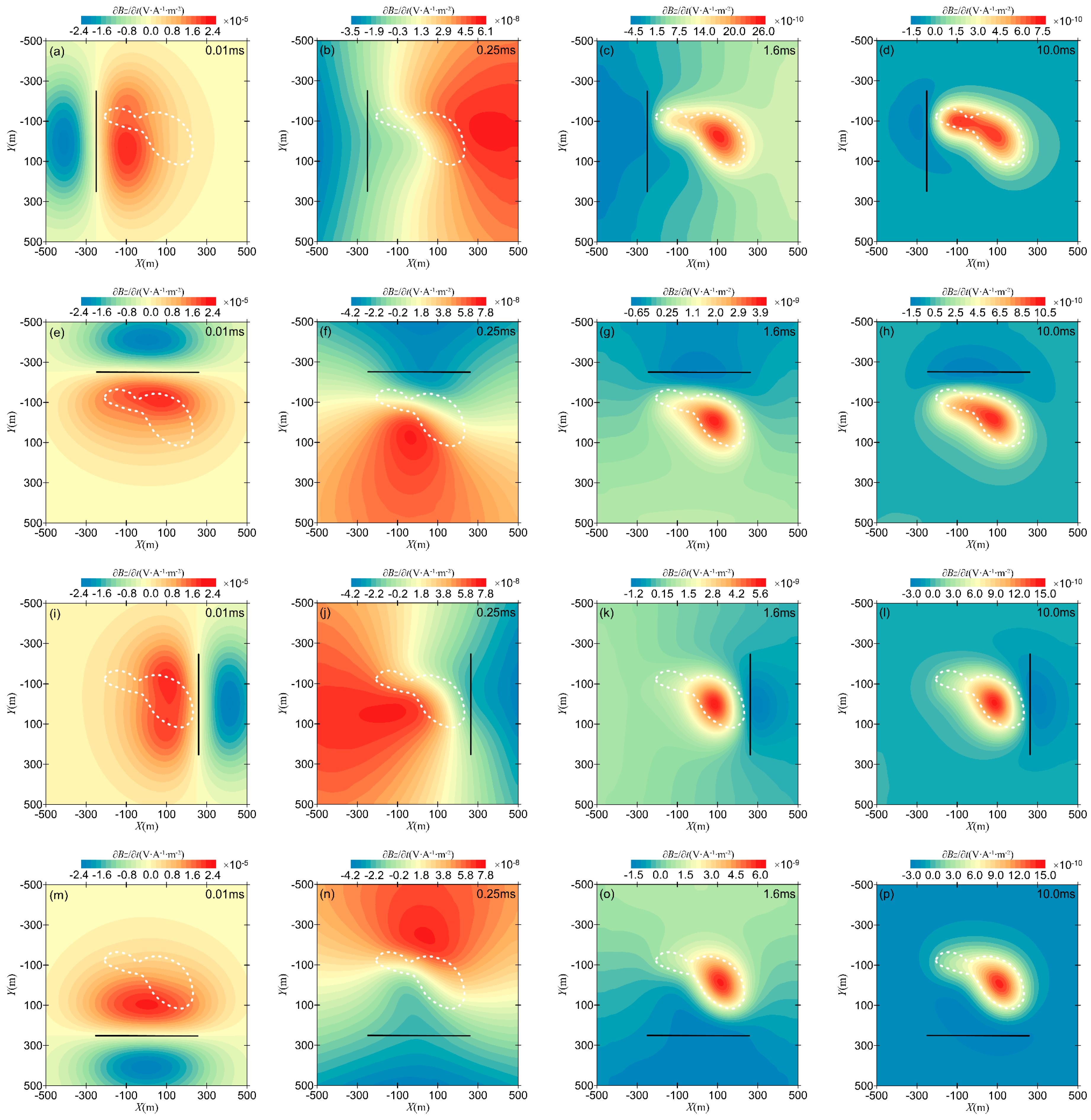
3.4. Large-Scale Sulfide Model
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vallee, M.A.; Smith, R.S.; Keating, P. Metalliferous mining geophysics—State of the art after a decade in the new millennium. Geophysics 2011, 76, W31–W50. [Google Scholar] [CrossRef]
- Fournier, D.; Kang, S.; McMillan, M.S.; Oldenburg, D.W. Inversion of airborne geophysics over the DO-27/DO-18 kimberlites-Part 2: Electromagnetics. Interpretation 2017, 5, T313–T325. [Google Scholar] [CrossRef]
- Di, Q.Y.; Xue, G.Q.; Yin, C.C.; Li, X. New methods of controlled-source electromagnetic detection in China. Sci. China Earth Sci. 2020, 50, 1219–1227. [Google Scholar] [CrossRef]
- Lu, K.L.; Fan, Y.N.; Li, X.; Zhou, J.M.; Fan, K.R. Transient electromagnetic pseudo wavefield imaging based on the sweep-time preconditioned precise integration algorithm. J. Appl. Geophys. 2023, 209, 104937. [Google Scholar] [CrossRef]
- Jiang, Z.H.; Liu, L.B.; Liu, S.C.; Yue, J.H. Surface-to-Underground Transient Electromagnetic Detection of Water-Bearing Goaves. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5303–5318. [Google Scholar] [CrossRef]
- Xue, G.Q.; Zhang, L.B.; Zhou, N.N.; Chen, W.Y. Developments measurements of TEM sounding in China. Geol. J. 2020, 55, 1636–1643. [Google Scholar] [CrossRef]
- Lu, K.L.; Li, X.; Fan, Y.N.; Zhou, J.M.; Qi, Z.P.; Li, W.H.; Li, H. The application of multi-grounded source transient electromagnetic method in the detections of coal seam goafs in Gansu Province, China. J. Geophys. Eng. 2021, 18, 515–528. [Google Scholar] [CrossRef]
- Li, S.C.; Sun, H.F.; Lu, X.S.; Li, X. Three-dimensional modeling of transient electromagnetic responses of water-bearing structures in front of a tunnel face. J. Environ. Eng. Geophys. 2014, 19, 13–32. [Google Scholar] [CrossRef]
- Liu, B.; Fan, K.R.; Nie, L.C.; Li, X.; Liu, F.S.; Li, L.M.; Wang, J.S.; Sun, H.F.; Chen, L. Mapping water-abundant zones using transient electromagnetic and seismic methods when tunneling through fractured granite in the Qinling Mountains, China. Geophysics 2020, 85, B147–B159. [Google Scholar] [CrossRef]
- Auken, E.; Foged, N.; Larsen, J.J.; Lassen, K.V.T.; Maurya, P.K.; Dath, S.M.; Eiskjær, T.T. tTEM-towed transient electromagnetic system for Detailed 3D Imaging of the top 70 m of the subsurface. Geophysics 2019, 84, E13–E22. [Google Scholar] [CrossRef]
- Gottschalk, I.; Knight, R.; Asch, T.; Abraham, J.; Cannia, J. Using an airborne electromagnetic method to map saltwater intrusion in the northern Salinas Valley, California. Geophysics 2020, 85, B119–B131. [Google Scholar] [CrossRef]
- Yin, C.C.; Liu, Y.H.; Xiong, B. Status and prospect of 3D inversions in EM geophysics. Sci. China Earth Sci. 2020, 63, 452–455. [Google Scholar] [CrossRef]
- Wang, T.; Hohmann, G.W. A finite-difference, time-domain solution for three-dimensional electromagnetic modeling. Geophysics 1993, 58, 797–809. [Google Scholar] [CrossRef]
- Commer, M.; Newman, G. A parallel finite-difference approach for 3D transient electromagnetic modeling with galvanic sources. Geophysics 2004, 69, 1192–1202. [Google Scholar] [CrossRef]
- Sun, H.F.; Li, X.; Li, S.C.; Qi, Z.P.; Wang, Y.P.; Su, M.X.; Xue, Y.G.; Liu, B. Three-dimensional FDTD modeling of TEM excited by a loop source considering ramp time. Chin. J. Geophys. 2013, 56, 1049–1064. [Google Scholar]
- Ji, Y.J.; Wu, Y.; Guan, S.; Zhao, X. 3D numerical modeling of induced-polarization electromagnetic response based on the finite-difference time-domain method. Geophysics 2018, 83, E385–E398. [Google Scholar] [CrossRef]
- Um, E.S.; Harris, J.M.; Alumbaugh, D.L. An iterative finite element time-domain method for simulating three-dimensional electromagnetic diffusion in earth. Geophys. J. Int. 2012, 190, 871–886. [Google Scholar] [CrossRef]
- Oldenburg, D.W.; Haber, E.; Shekhtman, R. Three dimensional inversion of multisource time domain electromagnetic data. Geophysics 2013, 78, E47–E57. [Google Scholar] [CrossRef]
- Fu, H.; Wang, Y.; Um, E.S.; Fang, J.; Wei, T.; Huang, X.; Yang, G. A parallel finite-element time-domain method for transient electromagnetic simulation. Geophysics 2015, 80, E213–E224. [Google Scholar] [CrossRef]
- Yin, C.C.; Qi, Y.F.; Liu, Y.H. 3D time-domain airborne EM modeling for an arbitrarily anisotropic earth. J. Appl. Geophys. 2016, 131, 163–178. [Google Scholar] [CrossRef]
- Qi, Y.F.; Yin, C.C.; Liu, Y.H.; Cai, J. 3D time-domain airborne EM full-wave forward modeling based on instantaneous current pulse. Chin. J. Geophys. 2017, 60, 369–382. [Google Scholar]
- Druskin, V.; Knizhnerman, L. Spectral approach to solving three-dimensional Maxwell’s diffusion equations in the time and frequency domains. Radio Sci. 1994, 29, 937–953. [Google Scholar] [CrossRef]
- Zaslavsky, M.; Druskin, V.; Knizhnerman, L. Solution of 3D time-domain electromagnetic problems using optimal subspace projection. Geophysics 2011, 76, F339–F351. [Google Scholar] [CrossRef]
- Sommer, M.; Hölz, S.; Moorkamp, M.; Swidinsky, A.; Heincke, B.; Scholl, C.; Jegen, M. GPU parallelization of a three dimensional marine CSEM code. Comput. Geosci. 2013, 58, 91–99. [Google Scholar] [CrossRef]
- Börner, R.U.; Ernst, O.G.; Güttel, S. Three-dimensional transient electromagnetic modelling using rational Krylov methods. Geophys. J. Int. 2015, 202, 2025–2043. [Google Scholar] [CrossRef]
- Zhou, J.M.; Liu, W.T.; Li, X.; Qi, Z.P. 3D transient electromagnetic modeling using a shift-and-invert Krylov subspace method. J. Geophys. Eng. 2018, 15, 1341–1349. [Google Scholar] [CrossRef]
- Lu, K.L.; Fan, Y.N.; Zhou, J.M.; Li, X.; Fan, K.R. 3D anisotropic TEM modeling with loop source using model reduction method. J. Geophys. Eng. 2022, 19, 403–417. [Google Scholar] [CrossRef]
- Li, J.H.; Farquharson, C.G.; Hu, X.Y. 3D vector finite-element electromagnetic forward modeling for large loop sources using a total-field algorithm and unstructured tetrahedral grids. Geophysics 2017, 82, E1–E16. [Google Scholar] [CrossRef]
- Haber, E.; Oldenburg, D.W.; Shekhtman, R. Inversion of time domain three-dimensional electromagnetic data. Geophys. J. Int. 2007, 171, 550–564. [Google Scholar] [CrossRef]
- Hochbruck, M.; Lubich, C. On Krylov subspace approximations to the matrix exponential operator. SIAM J. Numer. Anal. 1997, 34, 1911–1925. [Google Scholar] [CrossRef]
- Van, D.E.J.; Hochbruck, M. Preconditioning Lanczos approximations to the matrix exponential. SIAM J. Sci. Comput. 2006, 27, 1438–1457. [Google Scholar]
- Liu, W.T.; Farquharson, C.G.; Zhou, J.M.; Li, X. A rational Krylov subspace method for 3D modeling of grounded electrical source airborne time-domain electromagnetic data. J. Geophys. Eng. 2019, 16, 451–462. [Google Scholar] [CrossRef]
- Li, J.H.; Zhu, Z.Q.; Liu, S.C.; Zeng, S.H. 3D numerical simulation for the transient electromagnetic field excited by the central loop based on the vector finite-element method. J. Geophys. Eng. 2011, 8, 560–567. [Google Scholar] [CrossRef]
- Altaf, S.; Sani, F.; Akram, S. Comparative study of some iterative methods for nonlinear equations from a dynamical point of view. J. Mt. Area Res. 2024, 9, 46–53. [Google Scholar]
- Wu, X.P.; Xu, G.M. Study on 3-D resistivity inversion using conjugate gradient method. Chin. J. Geophys. 2000, 43, 450–458. [Google Scholar]
- Wu, X.P.; Wang, T.T. A 3-D finite-element resistivity forward modeling using conjugate gradient algorithm. Chin. J. Geophys. 2003, 46, 428–432. [Google Scholar]
- Peng, R.H.; Hu, X.Y.; Han, B. 3D inversion of frequency-domain CSEM data based on Gauss-Newton optimization. Chin. J. Geophys. 2016, 59, 3470–3481. [Google Scholar]
- Kazemi, N. Shot-record extended model domain preconditioners for least-squares migration. Geophysics 2019, 84, S285–S299. [Google Scholar] [CrossRef]
- Ma, G.Q.; Zhou, B.; Riahi, M.K.; Zemerly, J.; Xu, L. On cost-efficient parallel iterative solvers for 3D frequency-domain seismic multisource viscoelastic anisotropic wave modeling. Geophysics 2024, 89, T151–T162. [Google Scholar] [CrossRef]
- Fang, Z.L.; Wang, H. GPU accelerated sparse curvelet-constrained wavefield reconstruction inversion with source estimation: Application to Chevron Benchmark 2014 blind test data set. Geophysics 2024, 89, R443–R455. [Google Scholar] [CrossRef]
- Li, J.H.; Wang, Y. Effects of base frequency, duty cycle, and waveform repetition on transient electromagnetic responses: Insights from models of a deep-buried conductor. Geophysics 2024, 89, E165–E176. [Google Scholar] [CrossRef]
- Gao, R.Y.; Yin, C.C.; Liang, H.; Liu, Y.H.; Wang, L.Y.; Su, Y.; Xiong, B. Three-dimensional simulation and characterization of airborne transient electromagnetic response in rough media. Geophysics 2024, 89, E61–E71. [Google Scholar] [CrossRef]
- Lu, K.L.; Yue, J.H.; Fan, Y.N.; Li, X.; Zhou, J.M.; Qi, Y.F. Three-dimensional transient electromagnetic large-scale forward modeling based on unstructured tetrahedral mesh. Chin. J. Geophys. 2025, 68, 327–341. [Google Scholar]
- Lu, K.L.; Yue, J.H.; Zhou, J.M.; Fan, Y.N.; Fan, K.R.; Li, H.; Li, X. Quadrature-based restarted Arnoldi method for fast 3-D TEM forward modeling of large-scale models. IEEE Geosci. Remote Sens. 2025, 68, 327–341. [Google Scholar] [CrossRef]
- Saad, Y. Iterative Methods for Sparse Linear Systems; SIAM: Philadelphia, PA, USA, 2003. [Google Scholar]
- Higham, N.J. The scaling and squaring method for the matrix exponential revisited. SIAM J. Matrix Anal. Appl. 2005, 26, 1179–1193. [Google Scholar] [CrossRef]
- Liu, S.B.; Sun, H.F.; Li, W.H.; Wang, Z.; Yang, Y. 3D transient electromagnetics forward modeling using BEDS-FDTD and its stability verification. Chin. J. Geophys. 2023, 66, 841–853. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Interval | |||
|---|---|---|---|
| Subspace order m |
| 0.2 | 0.4 | 0.6 | 0.8 | 1.0 | 1.2 | 1.4 | 1.6 | 1.8 | |
|---|---|---|---|---|---|---|---|---|---|
| [10−5,10−4]s | √ | √ | √ | √ | √ | √ | √ | √ | √ |
| [10−4,10−3]s | √ | √ | √ | √ | √ | √ | √ | √ | √ |
| [10−3,10−2]s | √ | √ | √ | √ | √ | √ | √ | √ | √ |
| Unknowns | Time-Segmented Method | Direct Method (FEM) | Iterative Method (FEM) | |||
|---|---|---|---|---|---|---|
| Time | Memory | Times | Memory | Time | Memory | |
| 211,725 | 266 s | 0.4 G | 55 s | 2.4 G | 1808 s | 0.4 G |
| 689,789 | 997 s | 0.8 G | 241 s | 8.1 G | 2996 s | 0.8 G |
| 1,574,640 | 2730 s | 1.5 G | 851 s | 21.6 G | 17,384 s | 1.5 G |
| 3,160,300 | 6065 s | 2.8 G | 2255 s | 51.5 G | 37,166 s | 2.8 G |
| 5,275,768 | 10,815 s | 4.9 G | × | × | 62,987 s | 4.9 G |
| 8,550,025 | 16,286 s | 7.5 G | × | × | 104,414 s | 7.5 G |
| 12,642,086 | 27,783 s | 11.2 G | × | × | 151,442 s | 11.2 G |
| 17,690,940 | 39,679 s | 16.2 G | × | × | 217,680 s | 16.2 G |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Y.; Lu, K.; Li, J.; Fu, T. A Time-Segmented SAI-Krylov Subspace Approach for Large-Scale Transient Electromagnetic Forward Modeling. Appl. Sci. 2025, 15, 5359. https://doi.org/10.3390/app15105359
Fan Y, Lu K, Li J, Fu T. A Time-Segmented SAI-Krylov Subspace Approach for Large-Scale Transient Electromagnetic Forward Modeling. Applied Sciences. 2025; 15(10):5359. https://doi.org/10.3390/app15105359
Chicago/Turabian StyleFan, Ya’nan, Kailiang Lu, Juanjuan Li, and Tianchi Fu. 2025. "A Time-Segmented SAI-Krylov Subspace Approach for Large-Scale Transient Electromagnetic Forward Modeling" Applied Sciences 15, no. 10: 5359. https://doi.org/10.3390/app15105359
APA StyleFan, Y., Lu, K., Li, J., & Fu, T. (2025). A Time-Segmented SAI-Krylov Subspace Approach for Large-Scale Transient Electromagnetic Forward Modeling. Applied Sciences, 15(10), 5359. https://doi.org/10.3390/app15105359