
Three-Dimensional Borehole-to-Surface Electromagnetic Resistivity Anisotropic Forward Simulation Based on the Unstructured-Mesh Edge-Based Finite Element Method


Abstract
1. Introduction
2. Method
2.1. Governing Equation
2.2. Edge-Based Finite Element Method
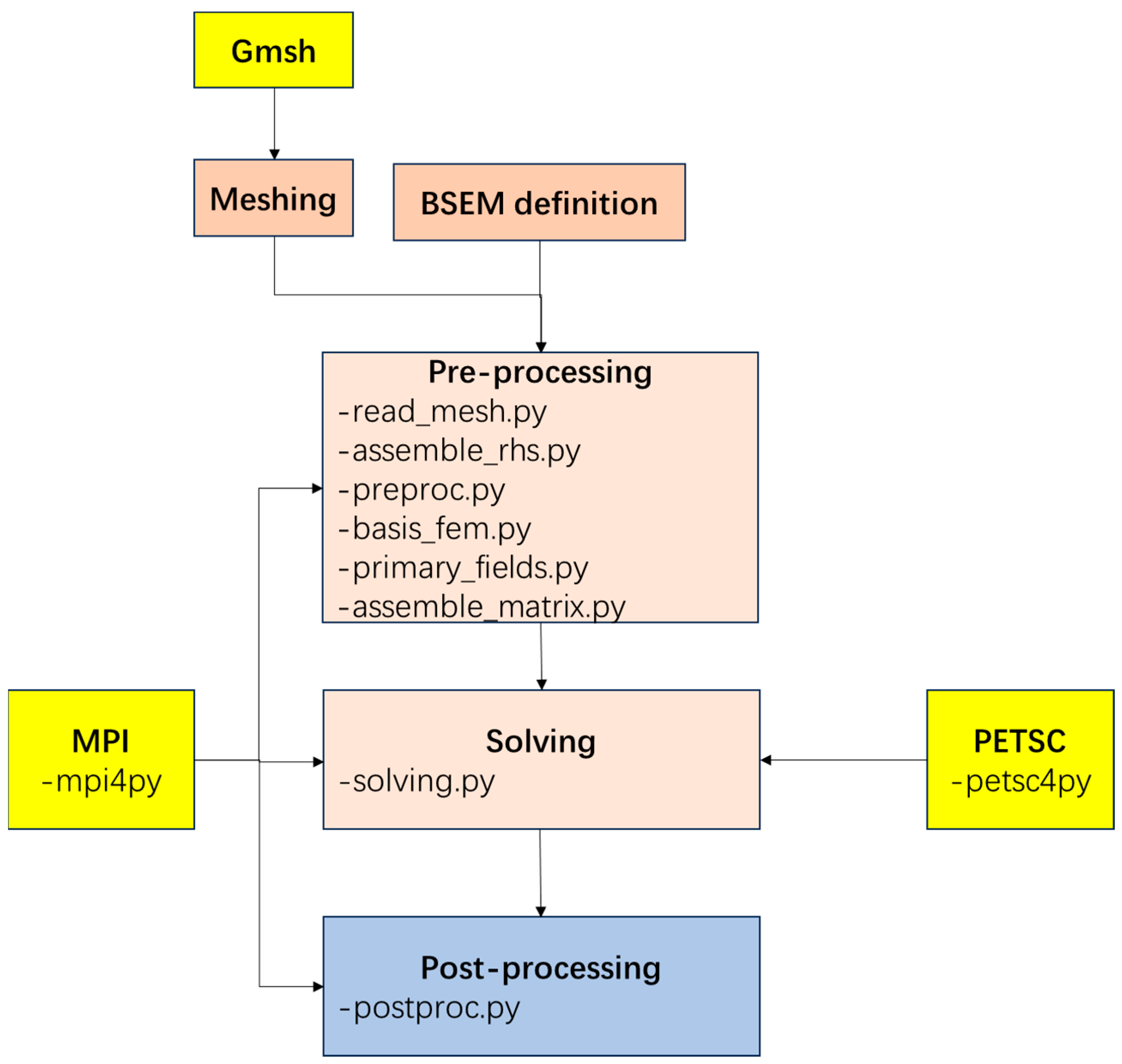
3. Implementation
- Define the boundary points for the computational domain, as well as the points corresponding to each formation boundary, anomaly boundary, and position of the receivers and transmitters.
- Connect these points to form lines, surfaces, and volumes, constructing the initial model mesh.
- Refine the mesh around the anomalies, receivers, and transmitter locations.
- Export the final model in msh format for reading by the main program.
4. Example Verification
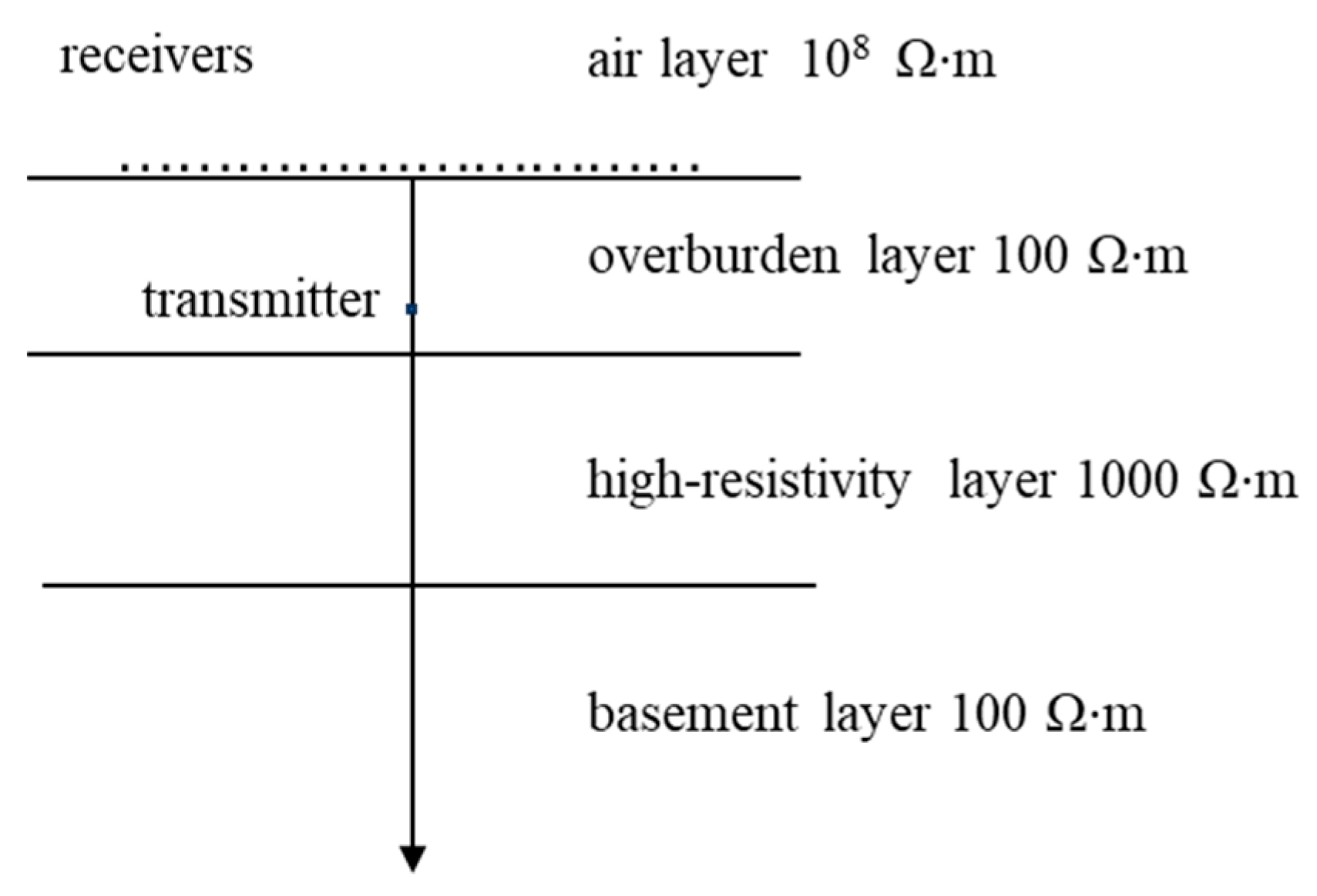
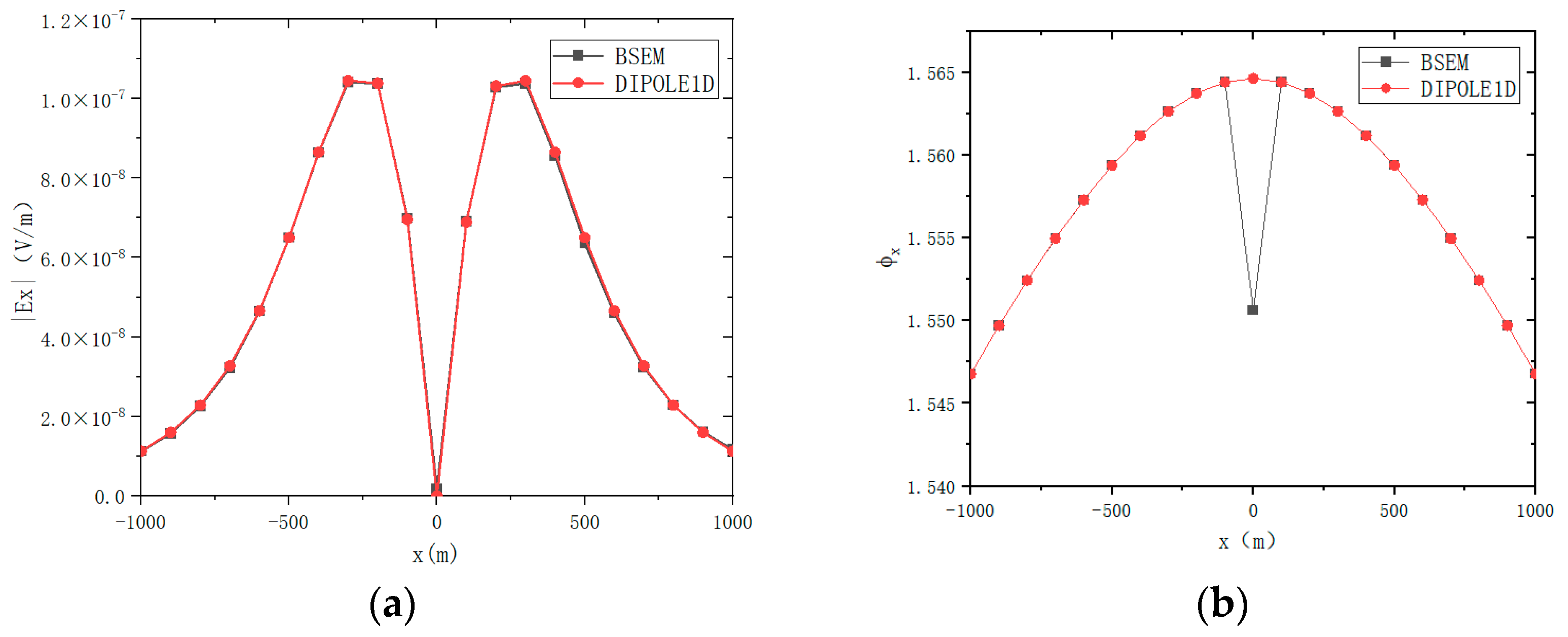
4.1. D Isotropic Reservoir Model
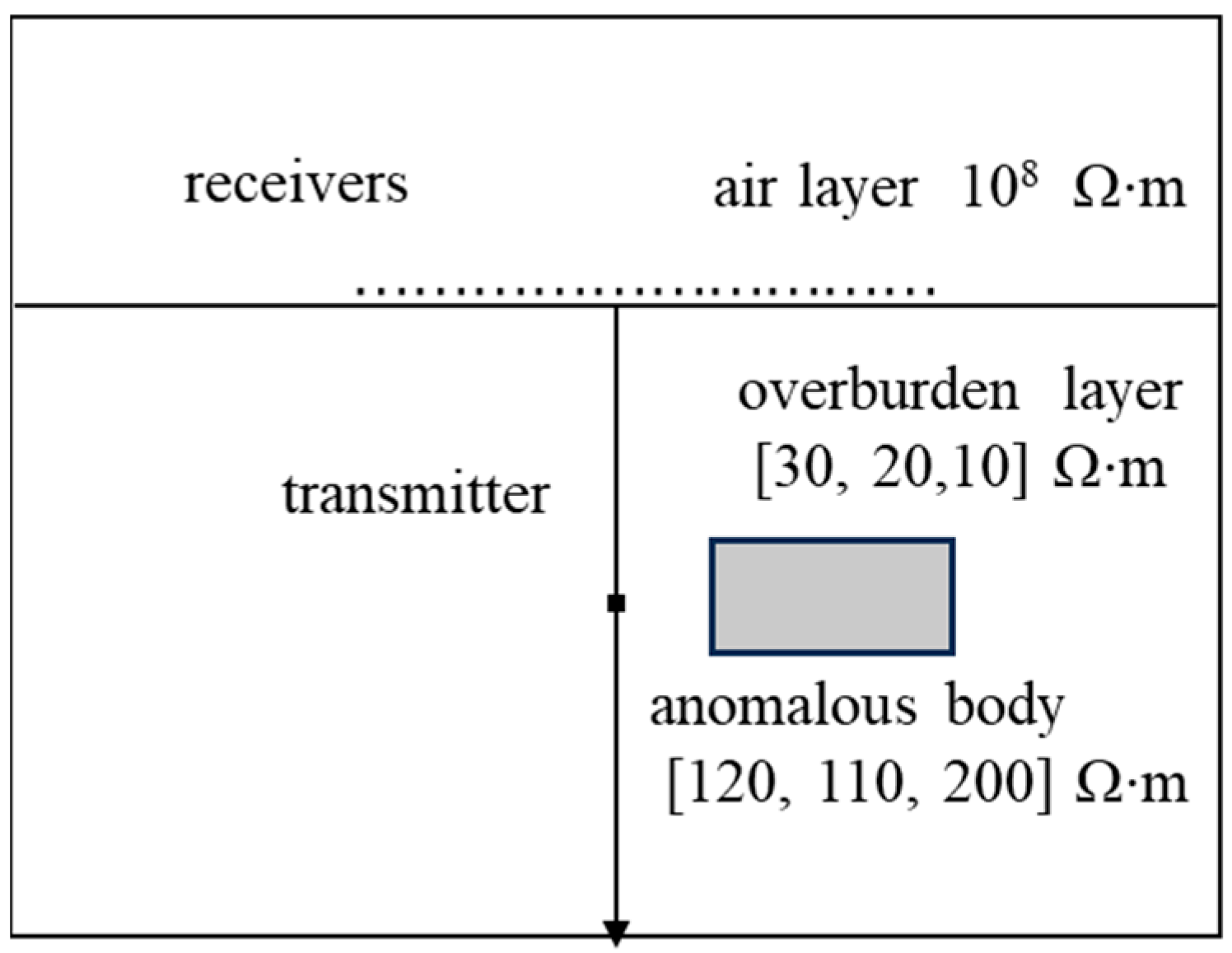
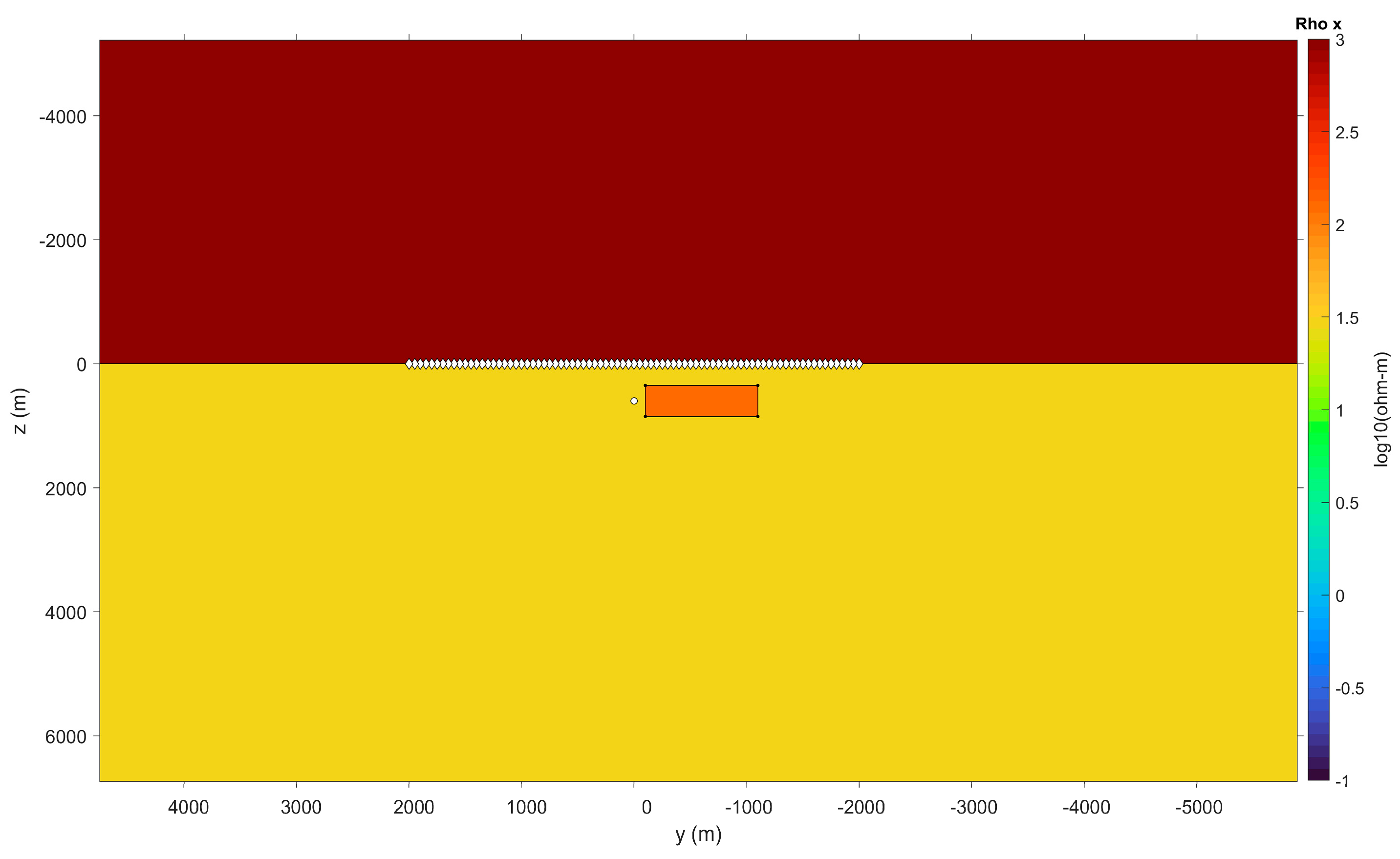
4.2. Two-Dimensional Anisotropic Reservoir Model
5. Reservoir Dynamic Monitoring Model
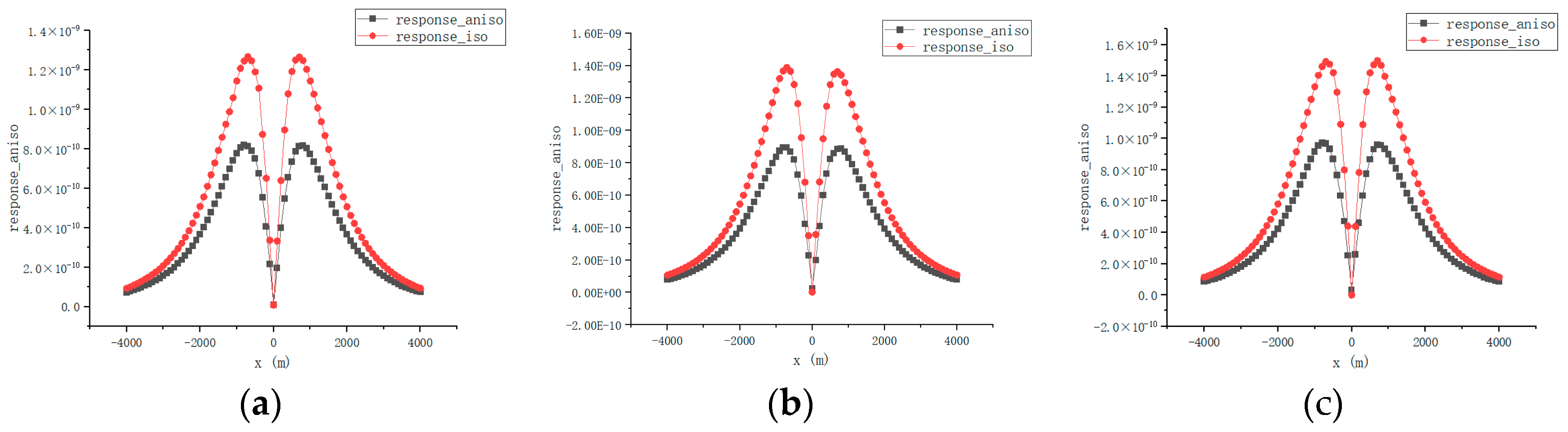
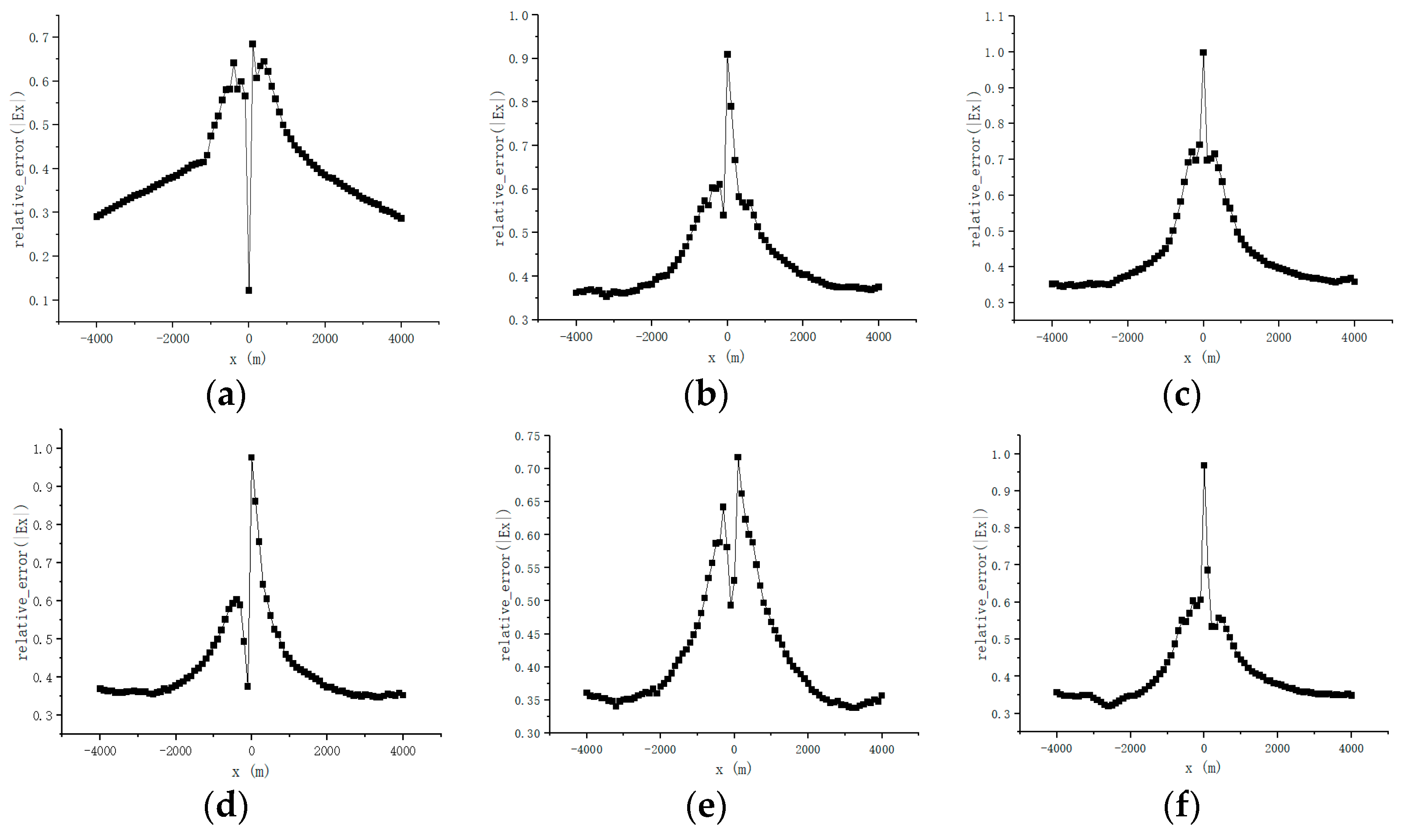
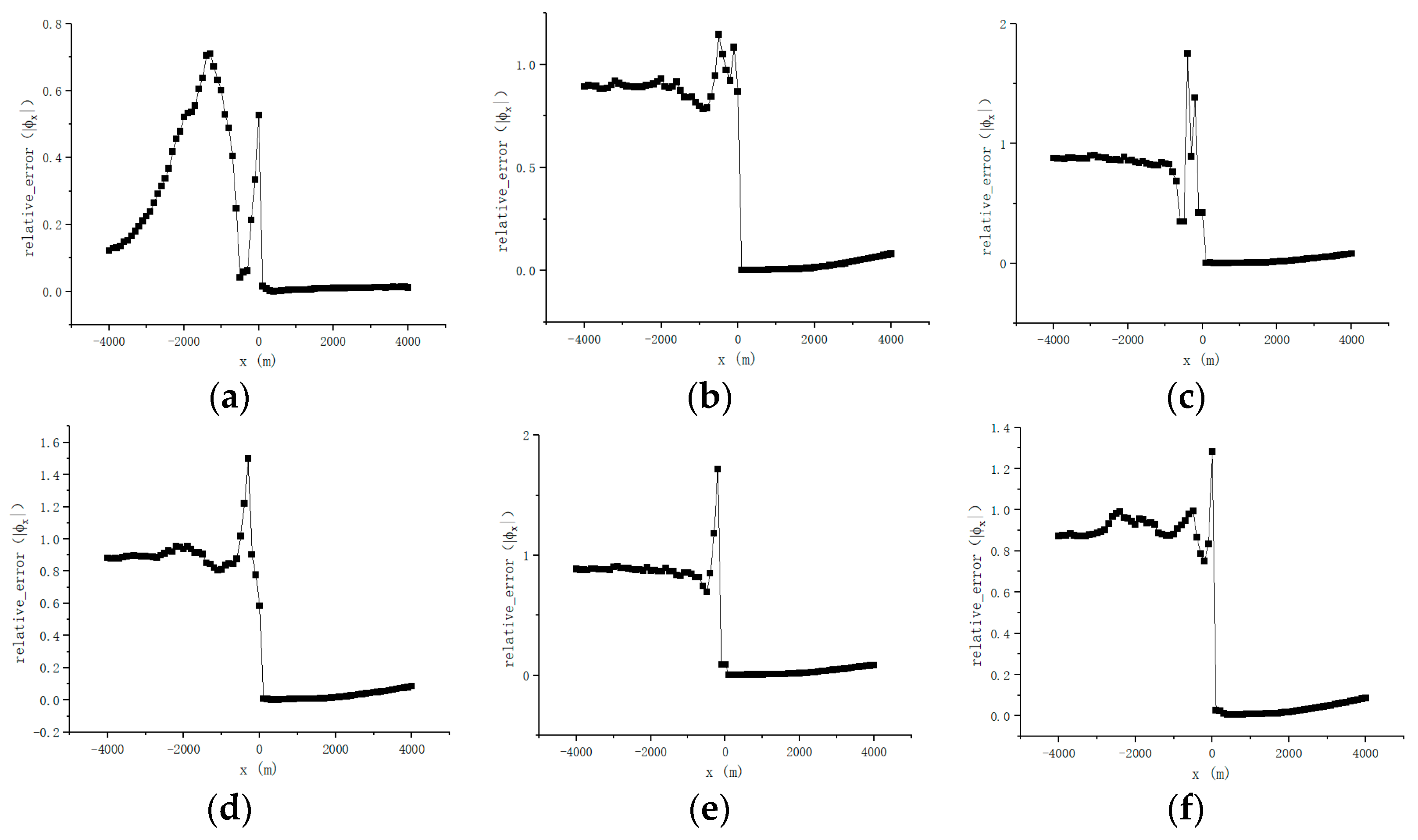
5.1. Comparison of Anisotropic Model and Isotropic Model
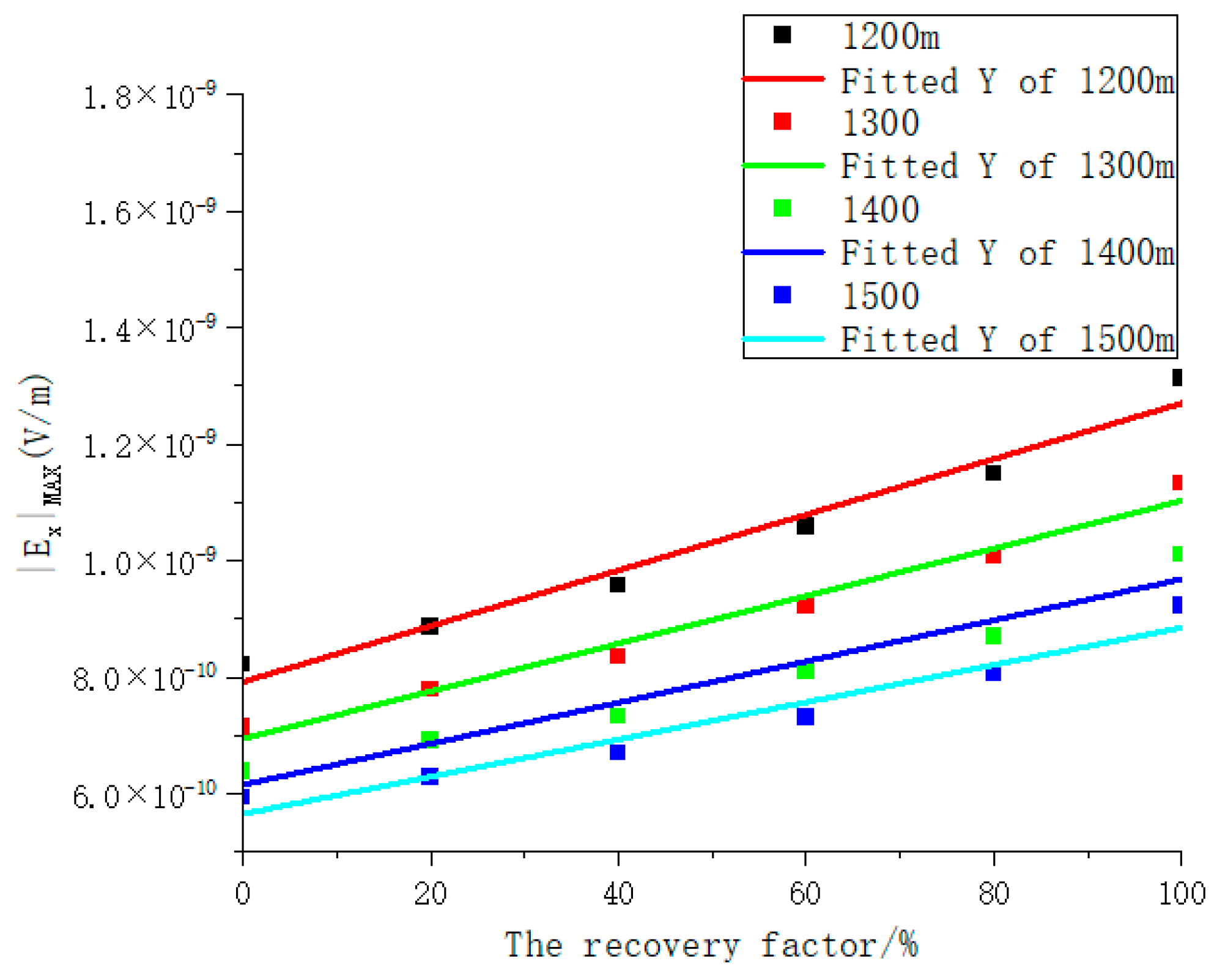
5.2. The Location of the Transmitter
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Um, E.S.; Kim, J.; Wilt, M. 3D borehole-to-surface and surface electromagnetic modeling and inversion in the presence of steel infrastructure. Geophysics 2020, 85, E139–E152. [Google Scholar] [CrossRef]
- He, Z.X. Research to Borehole-Surface Electromagnetic Technique New Way of Mapping Reservoir Boundary. Ph.D. Thesis, Chengdu University of Technology, Chengdu, China, 2006. [Google Scholar]
- Liu, X.; Wang, J.; He, Z.; Wang, Z. Study of hydrocarbon accumulation by borehole-ground EM method. Progr. Explor. Geophys. 2006, 29, 98–101. [Google Scholar]
- Paterson, N.R. Experimental and field data for the dual-frequency phase-shift method of airborne electromagnetic prospecting. Geophysics 1961, 26, 601–617. [Google Scholar] [CrossRef]
- Hedström, E.H.; Parasnis, D.S. Some model experiments relating to electromagnetic prospecting with special reference to airborne work. Geophys. Prospect. 1958, 6, 322–341. [Google Scholar] [CrossRef]
- Zhdanov, M.S.; Endo, M.; Black, N.; Spangler, L.; Fairweather, S.; Hibbs, A.; Eiskamp, G.; Will, R. Electromagnetic monitoring of CO2 sequestration in deep reservoirs. First Break 2013, 31. [Google Scholar] [CrossRef]
- Tietze, K.; Ritter, O.; Veeken, P. Controlled-source electromagnetic monitoring of reservoir oil saturation using a novel borehole-to-surface configuration. Geophys. Prospect. 2015, 63, 1468–1490. [Google Scholar] [CrossRef]
- Qin, C.; Li, H.; Li, H.; Zhao, N. High-order Finite Element Forward Modeling Algorithm for Three-dimensional Bore-hole-to-surface Electromagnetic Method using Octree Meshes. Geophysics 2024, 89, F61–F75. [Google Scholar] [CrossRef]
- Chen, Q.; Wu, N.; Liu, C.; Zou, C.; Liu, Y.; Sun, J.; Li, Y.; Hu, G. Research progress on global marine gas hydrate resistivity logging and electrical property experiments. J. Mar. Sci. Eng. 2022, 10, 645. [Google Scholar] [CrossRef]
- Cai, H.; Xiong, B.; Han, M.; Zhdanov, M. 3D controlled-source electromagnetic modeling in anisotropic medium using edge-based finite element method. Comput. Geosci. 2014, 73, 164–176. [Google Scholar] [CrossRef]
- Guo, H.; Li, Y.; Gong, S.; Lin, L.; Duan, Z.; Jia, S. Three-Dimensional Numerical Simulation of Controlled-Source Electromagnetic Method Based on Third-Type Boundary Condition. Symmetry 2024, 17, 25. [Google Scholar] [CrossRef]
- Puzyrev, V.; Koldan, J.; de la Puente, J.; Houzeaux, G.; Vázquez, M.; Cela, J.M. A parallel finite-element method for three-dimensional controlled-source electromagnetic forward modelling. Geophys. J. Int. 2013, 193, 678–693. [Google Scholar] [CrossRef]
- Wait, J.R. Fields of a horizontal wire antenna over a layered half-space. J. Electromagn. Waves Appl. 1996, 10, 1655–1662. [Google Scholar] [CrossRef]
- Newman, G.A.; Commer, M. New advance in three dimension transient electromagnetic inversion. Geophys. J. Int. 2005, 160, 5–32. [Google Scholar] [CrossRef]
- Key, K.; Ovall, J. A parallel goal-oriented adaptive finite element method for 2.5-D electromagnetic modeling. Geophys. J. Int. 2011, 186, 137–154. [Google Scholar] [CrossRef]
- Wang, T.; Wang, K.; Tan, H. Forward modeling and inversion of tensor CSAMT in 3D anisotropic media. Appl. Geophys. 2017, 14, 590–605. [Google Scholar] [CrossRef]
- Ling, J.; Chen, H.; Wei, S.; Zhang, Y.; Chen, Q.; Liu, S. 3-D resistivity modeling of undulating terrain using space-wavenumber mixed domain approach. Phys. Scr. 2025, 100, 035018. [Google Scholar] [CrossRef]
- Castillo-Reyes, O.; Modesto, D.; Queralt, P.; Marcuello, A.; Ledo, J.; Amor-Martin, A.; de la Puente, J.; García-Castillo, L.E. 3D magnetotelluric modeling using high-order tetrahedral Nédélec elements on massively parallel computing platforms. Comput. Geosci. 2022, 160, 105030. [Google Scholar] [CrossRef]
- Shantsev, D.V.; Jaysaval, P.; de la Kethulle de Ryhove, S.; Amestoy, P.R.; Buttari, A.; l’Excellent, J.Y.; Mary, T. Large-scale 3-D EM modelling with a Block Low-Rank multifrontal direct solver. Geophys. J. Int. 2017, 209, 1558–1571. [Google Scholar] [CrossRef]
- Courant, R. Variational methods for the solution of problems of equilibrium and vibrations. In Finite Element Methods; CRC Press: Boca Raton, FL, USA, 1943. [Google Scholar]
- Nam, M.J.; Kim, H.J.; Song, Y.; Lee, T.J.; Son, J.; Suh, J.H. 3D magnetotelluric modelling including surface topography. Geophys. Prospect. 2007, 55, 277–287. [Google Scholar] [CrossRef]
- Nédélec, J.C. Mixed finite elements in R3. Numer. Math. 1980, 35, 315–341. [Google Scholar] [CrossRef]
- Webb, J.P. Edge elements and what they can do for you. IEEE Trans. Magn. 1993, 29, 1460–1465. [Google Scholar] [CrossRef]
- Barton, M.L.; Cendes, Z.J. New vector finite elements for three-dimensional magnetic field computation. J. Appl. Phys. 1987, 61, 3919–3921. [Google Scholar] [CrossRef]
- Kamireddy, D.; Madhukar Chavan, S.; Nandy, A. Comparative performance of novel nodal-to-edge finite elements over conventional nodal element for electromagnetic analysis. J. Electromagn. Waves Appl. 2023, 37, 133–161. [Google Scholar] [CrossRef]
- Lee, J.F.; Sun, D.K.; Cendes, Z.J. Tangential vector finite elements for electromagnetic field computation. IEEE Trans. Magn. 1991, 27, 4032–4035. [Google Scholar] [CrossRef]
- Kordy, M.; Wannamaker, P.; Maris, V.; Cherkaev, E.; Hill, G. 3-D magnetotelluric inversion including topography using deformed hexahedral edge finite elements and direct solvers parallelized on SMP computers–Part I: Forward problem and parameter Jacobians. Geophys. J. Int. 2016, 204, 74–93. [Google Scholar] [CrossRef]
- Farquharson, C.G.; Miensopust, M.P. Three-dimensional finite-element modelling of magnetotelluric data with a divergence correction. J. Appl. Geophys. 2011, 75, 699–710. [Google Scholar] [CrossRef]
- Usui, Y. 3-D inversion of magnetotelluric data using unstructured tetrahedral elements: Applicability to data affected by topography. Geophys. J. Int. 2015, 202, 828–849. [Google Scholar] [CrossRef]
- Kangazian, M.; Farquharson, C.G. Including geological orientation information into geophysical inversions with unstructured tetrahedral meshes. Geophys. J. Int. 2024, 238, 827–847. [Google Scholar] [CrossRef]
- Cai, H.; Kong, R.; He, Z.; Wang, X.; Liu, S.; Huang, S.; Kass, M.A.; Hu, X. Joint inversion of potential field data with adaptive unstructured tetrahedral mesh. Geophysics 2024, 89, G45–G63. [Google Scholar] [CrossRef]
- Zhou, J.; He, K.; Liu, Z.; Ruan, S.; Ran, H.-L. Three-dimensional Finite-Element Forward Modeling and Response Characteristic Analysis of Multifrequency Electromagnetic. Appl. Geophys. 2025, 1–13. [Google Scholar] [CrossRef]
- Wannamaker, P.E.; Stodt, J.A.; Rijo, L. A stable finite element solution for two-dimensional magnetotelluric modelling. Geophys. J. Int. 1987, 88, 277–296. [Google Scholar] [CrossRef]
- Li, Y.; Constable, S. 2D marine controlled-source electromagnetic modeling: Part 2—The effect of bathymetry. Geophysics 2007, 72, WA63–WA71. [Google Scholar] [CrossRef]
- Yin, C.; Hui, Z.; Zhang, B.; Liu, Y.; Ren, X. 3D adaptive forward modeling for time-domain marine CSEM over topographic seafloor. Chin. J. Geophys. 2019, 62, 1942–1953. [Google Scholar]
- He, G.; Xiao, T.; Wang, Y.; Wang, G. 3D CSAMT modeling in anisotropic media using edge-based finite element method. Explor. Geophys. 2019, 50, 42–56. [Google Scholar] [CrossRef]
- Yin, C.; Ben, F.; Liu, Y.; Huang, W.; Cai, J. MC-SEM 3D modeling for arbitrarily anisotropic media. Chin. J. Geophys. 2014, 57, 4110–4122. [Google Scholar]
- Rochlitz, R.; Skibbe, N.; Günther, T. custEM: Customizable finite-element simulation of complex controlled-source electromagnetic data. Geophysics 2019, 84, F17–F33. [Google Scholar] [CrossRef]
- Cockett, R.; Kang, S.; Heagy, L.J.; Pidlisecky, A.; Oldenburg, D.W. SimPEG: An open source framework for simulation and gradient based parameter estimation in geophysical applications. Comput. Geosci. 2015, 85, 142–154. [Google Scholar] [CrossRef]
- Werthmüller, D.; Mulder, W.A.; Slob, E.C. emg3d: A multigrid solver for 3D electromagnetic diffusion. J. Open Source Softw. 2019, 4, 1463. [Google Scholar] [CrossRef]
- Omisore, B.O.; Fayemi, O.; Brantson, E.T.; Jin, S.; Ansah, E. Three-dimensional anisotropy modelling and simulation of gas hydrate borehole-to-surface responses. J. Nat. Gas Sci. Eng. 2022, 106, 104738. [Google Scholar] [CrossRef]
- Alumbaugh, D.L.; Newman, G.A.; Prevost, L.; Shadid, J.N. Three-dimensional wideband electromagnetic modeling on massively parallel computers. Radio Sci. 1996, 31, 1–23. [Google Scholar] [CrossRef]
- Cai, H.; Hu, X.; Li, J.; Endo, M.; Xiong, B. Parallelized 3D CSEM modeling using edge-based finite element with total field formulation and unstructured mesh. Comput. Geosci. 2017, 99, 125–134. [Google Scholar] [CrossRef]
- Zhdanov, M.S. Geophysical Electromagnetic Theory and Methods; Elsevier: Amsterdam, The Netherlands, 2009. [Google Scholar]
- Anderson, W.L. A hybrid fast Hankel transform algorithm for electromagnetic modeling. Geophysics 1989, 54, 263–266. [Google Scholar] [CrossRef]
- Dalcin, L.; Fang, Y.L.L. mpi4py: Status update after 12 years of development. Comput. Sci. Eng. 2021, 23, 47–54. [Google Scholar] [CrossRef]
- Bueler, E. PETSc for Partial Differential Equations: Numerical Solutions in C and Python; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2020. [Google Scholar]
- Schwarzbach, C.; Börner, R.U.; Spitzer, K. Three-dimensional adaptive higher order finite element simulation for geo-electromagnetics—A marine CSEM example. Geophys. J. Int. 2011, 187, 63–74. [Google Scholar] [CrossRef]
- Geuzaine, C.; Remacle, J.F. Gmsh: A 3-D finite element mesh generator with built-in pre-and post-processing facilities. Int. J. Numer. Methods Eng. 2009, 79, 1309–1331. [Google Scholar] [CrossRef]
- Colombo, D.; McNeice, G.W. Quantifying surface-to-reservoir electromagnetics for waterflood monitoring in a Saudi Arabian carbonate reservoir. Geophysics 2013, 78, E281–E297. [Google Scholar] [CrossRef]
- Passalacqua, H.; Davydycheva, S.; Strack, K. Feasibility of multi-physics reservoir monitoring for Heavy Oil. In Proceedings of the SPE International Heavy Oil Conference and Exhibition, Kuwait City, Kuwait, 10–12 December 2018; p. D032S045R003. [Google Scholar]
- Klein, J.D.; Martin, P.R. The petrophysics of electrically anisotropic reservoirs. Log Anal. 1997, 38, 25–36. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Depth (m) | Linear Fitting Curve Slope |
|---|---|
| 1200 | 7.8863 × 10−10 |
| 1300 | 6.94106 × 10−10 |
| 1400 | 6.15028 × 10−10 |
| 1500 | 5.65149 × 10−10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, B.; Cao, H.; Chen, M.; Ma, R.; Wang, S. Three-Dimensional Borehole-to-Surface Electromagnetic Resistivity Anisotropic Forward Simulation Based on the Unstructured-Mesh Edge-Based Finite Element Method. Appl. Sci. 2025, 15, 5307. https://doi.org/10.3390/app15105307
Chen B, Cao H, Chen M, Ma R, Wang S. Three-Dimensional Borehole-to-Surface Electromagnetic Resistivity Anisotropic Forward Simulation Based on the Unstructured-Mesh Edge-Based Finite Element Method. Applied Sciences. 2025; 15(10):5307. https://doi.org/10.3390/app15105307
Chicago/Turabian StyleChen, Baiwu, Hui Cao, Mingchun Chen, Ruolong Ma, and Sihao Wang. 2025. "Three-Dimensional Borehole-to-Surface Electromagnetic Resistivity Anisotropic Forward Simulation Based on the Unstructured-Mesh Edge-Based Finite Element Method" Applied Sciences 15, no. 10: 5307. https://doi.org/10.3390/app15105307
APA StyleChen, B., Cao, H., Chen, M., Ma, R., & Wang, S. (2025). Three-Dimensional Borehole-to-Surface Electromagnetic Resistivity Anisotropic Forward Simulation Based on the Unstructured-Mesh Edge-Based Finite Element Method. Applied Sciences, 15(10), 5307. https://doi.org/10.3390/app15105307