
Magnetorheological Fluid-Based Haptic Feedback Damper


Abstract
1. Introduction
2. Theoretical Analysis and Simulation
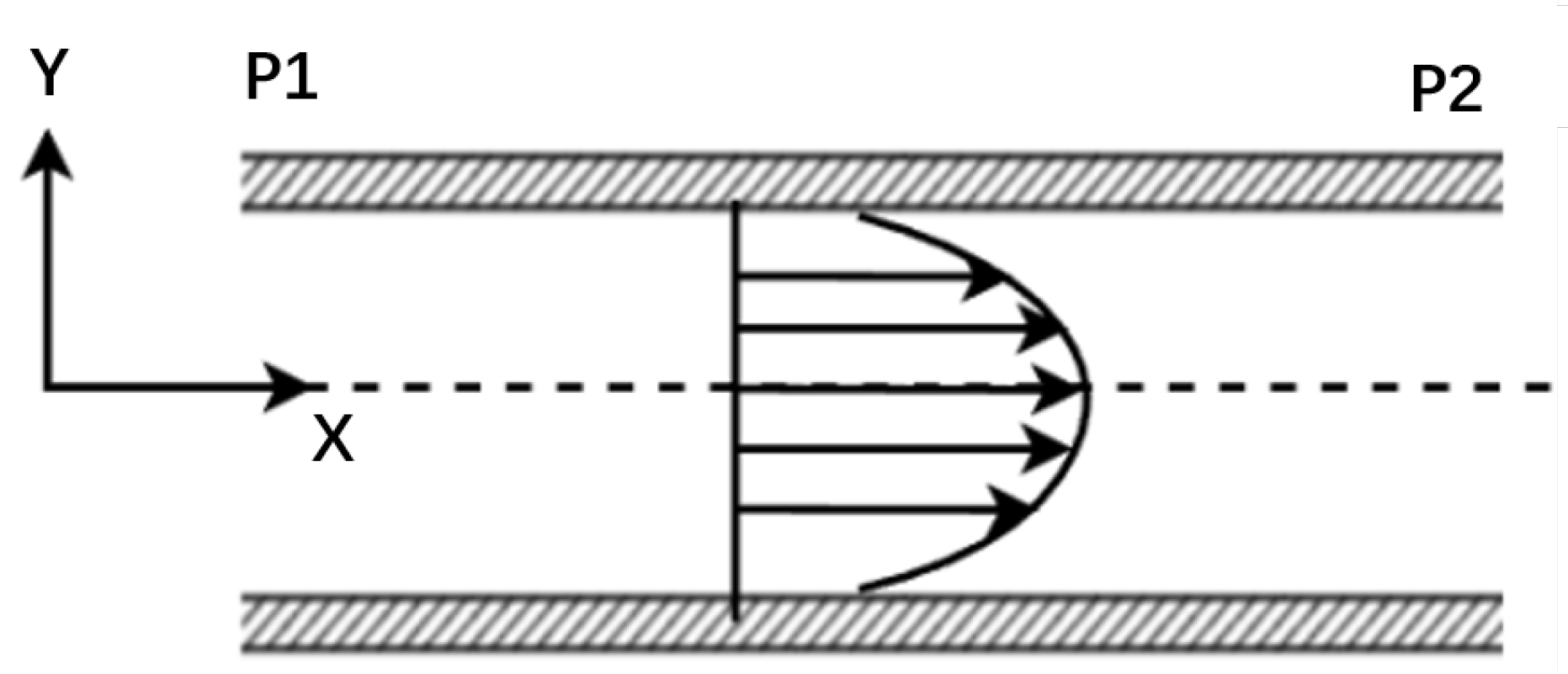
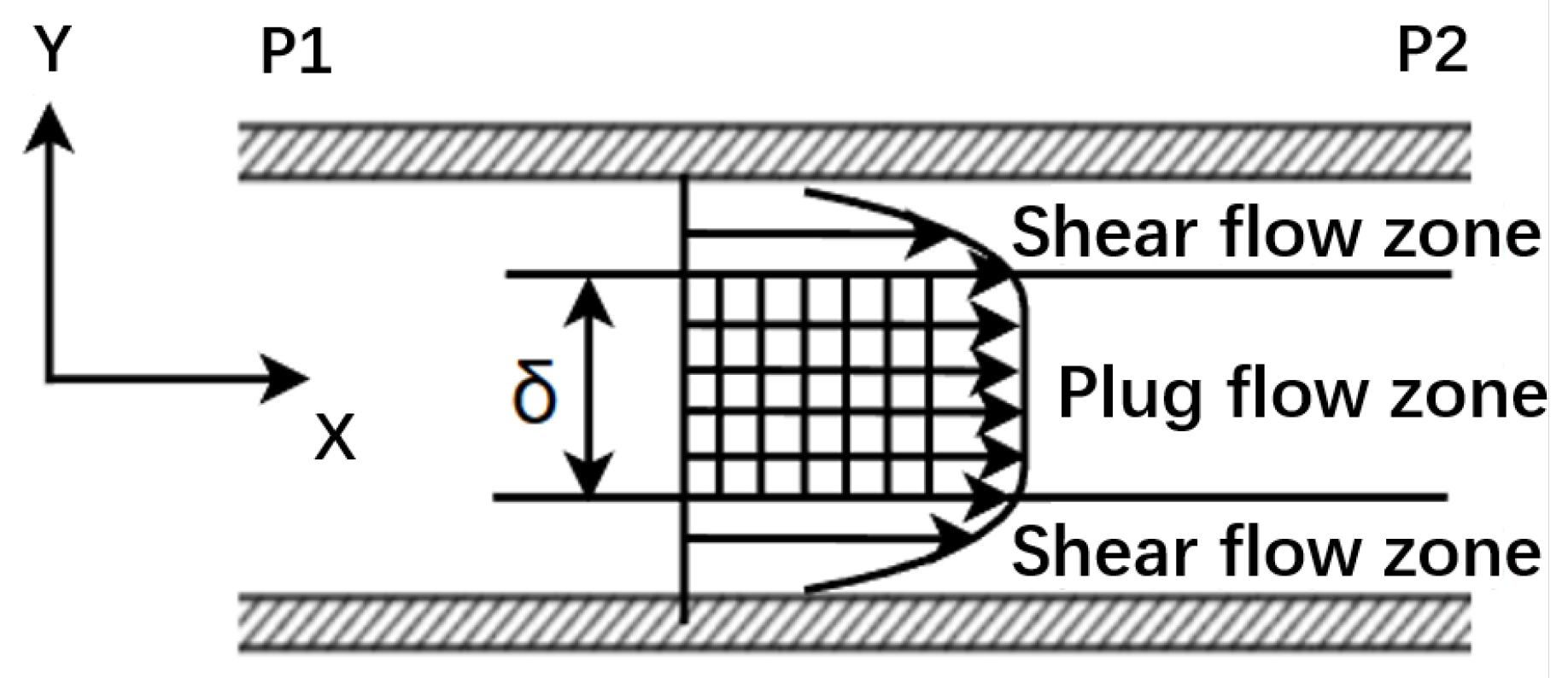
2.1. Fluid Mechanics Analysis
2.2. Magnet Array Simulation
2.3. Fluid Simulation
3. Experimental System Construction
3.1. System Architecture
3.2. 3D Design
4. Psychophysical Experiments
4.1. Experiment 1
- (1)
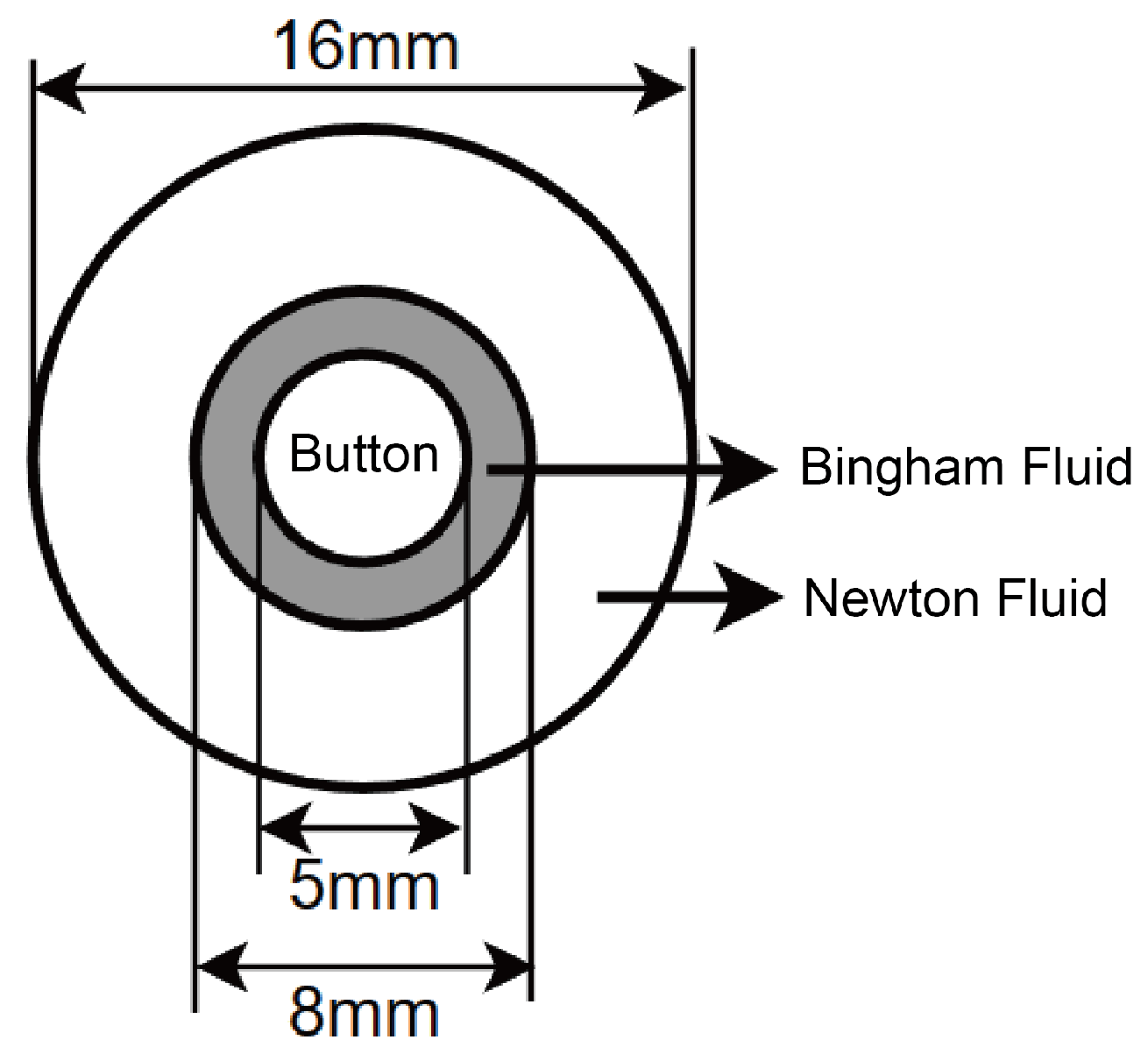
- The distance between the permanent magnets and the magnetorheological fluid layer was adjusted separately in the four damped buttons so that the distances were graded as 0 mm, 1.5 mm, 3 mm, and no magnet (the permanent magnet was removed in one button). The configuration is shown in Table 1 and Figure 17.
- (2)
- The volunteer pressed each of the four keys until the host computer output the key value represented by the key.
- (3)
- The volunteer’s feedback on the distance between the permanent magnet and the magnetorheological fluid layer corresponding to the most comfortable key was recorded.
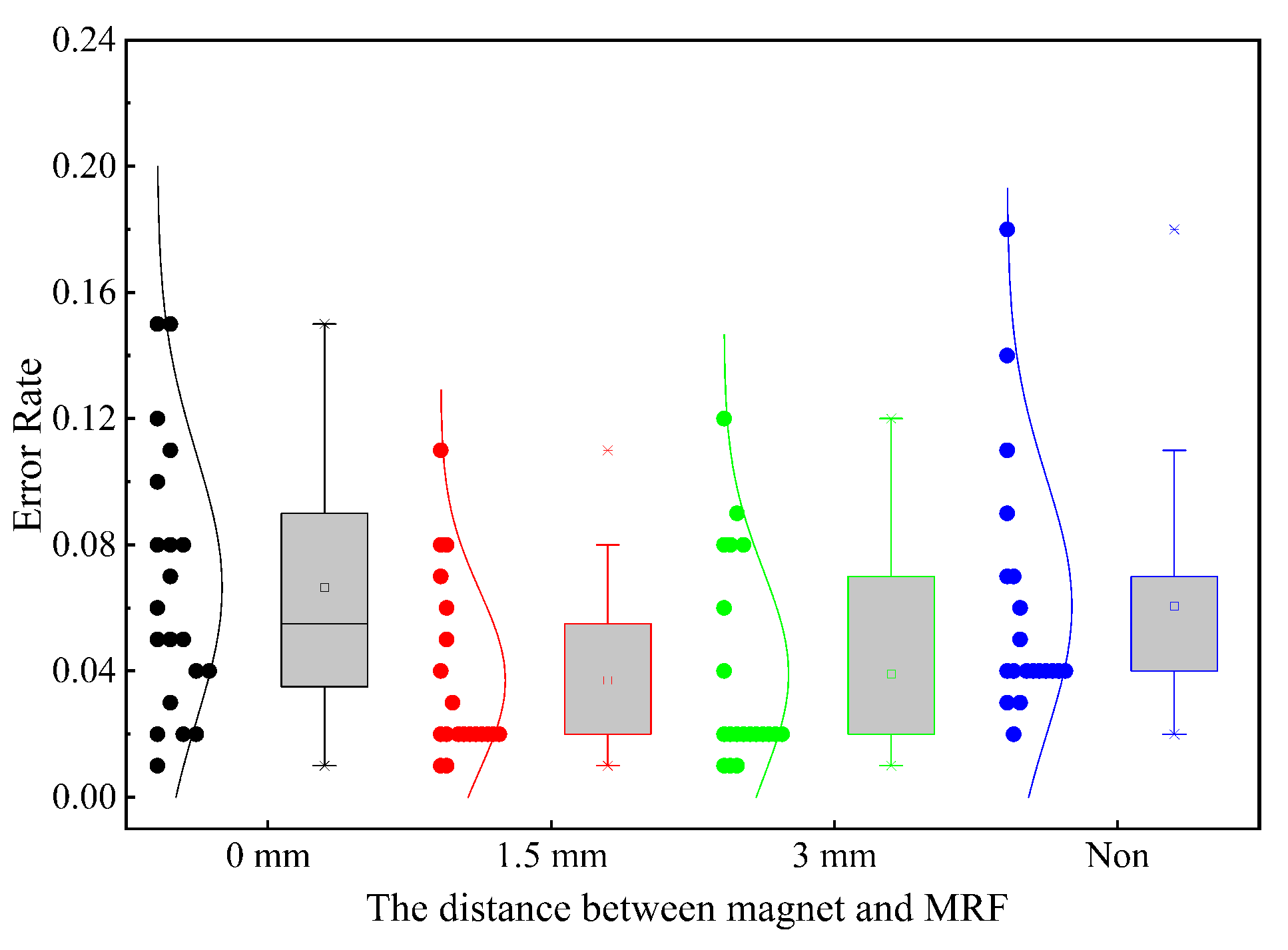
4.2. Experiment 2
- (1)
- A string (100 characters) containing only “abcd” characters was generated, where the number of each character was equal.
- (2)
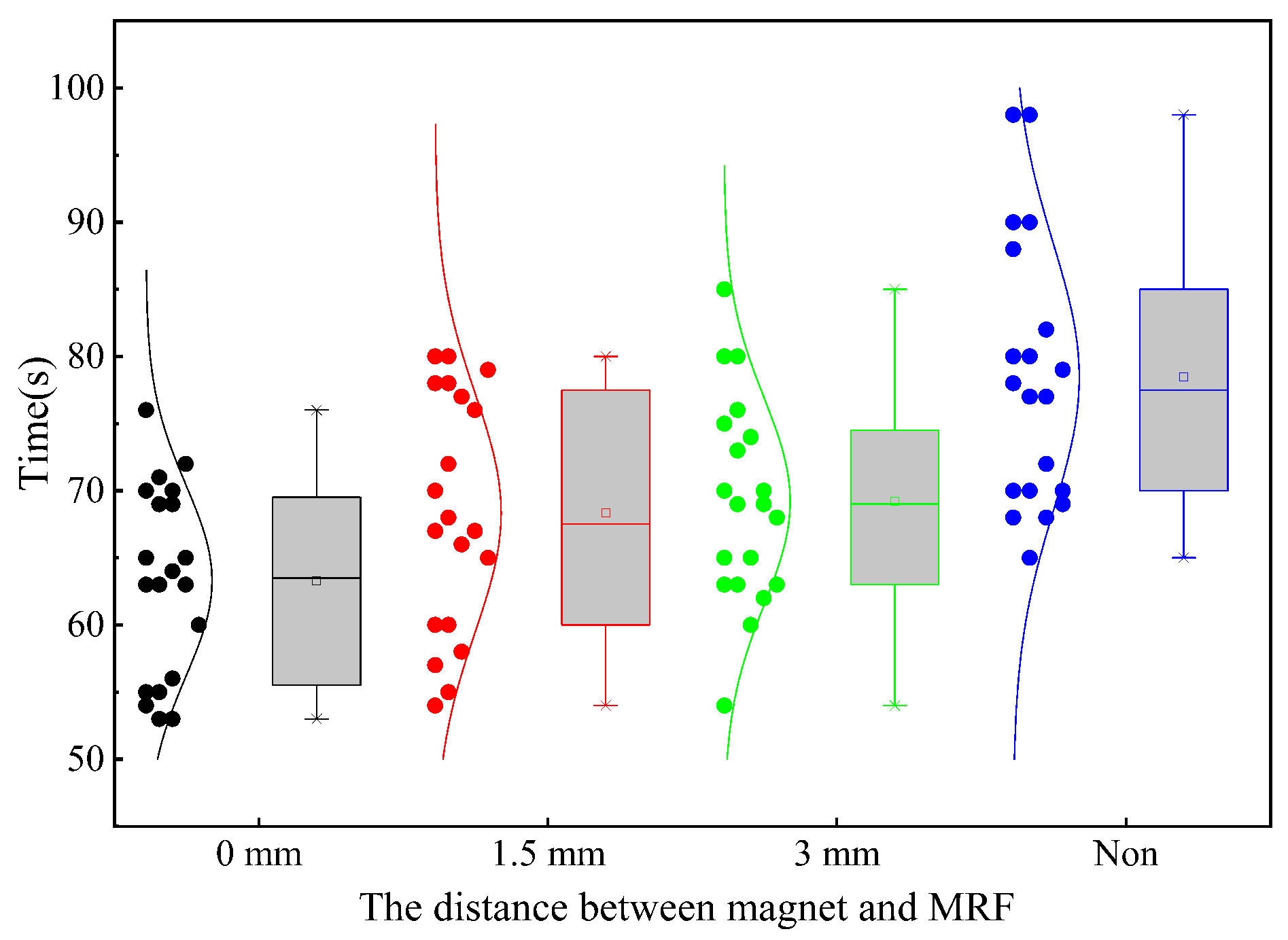
- The distance between the magnet and the magnetorheological fluid layer in the device was set to one of four random distances (0 mm, 1.5 mm, 3 mm, Non; all four keys were the same), as shown in Table 3.
- (3)
- The volunteers entered the string as fast as they could. The results were not displayed by the host computer and were stored on a data card for statistical analysis.
- (4)
- Steps 1, 2, and 3 were repeated four times. All volunteers completed the above experiment.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, G.Y.; Liao, H.P.; Zhao, X. Haptic device and interface to reproduce force and tactile feedback of biological tissues. Sensors Actuators-Phys. 2024, 366, 115022. [Google Scholar] [CrossRef]
- Kamikawa, Y.; Okamura, A.M. Comparison Between Force-Controlled Skin Deformation Feedback and Hand-Grounded Kinesthetic Force Feedback for Sensory Substitution. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 943–948. [Google Scholar]
- Zhang, L.X.; Xiong, H.X.; Han, L.L. Design and implementation of a 6 DOF delta force feedback controller for tele-operation. IEEE Robot. Autom. Lett. 2018, 3, 2174–2181. [Google Scholar]
- Jiang, N.; Sun, S.; Ouyang, M.X. A highly adaptive magnetorheological fluid robotic leg for efficient terrestrial locomotion. Smart Mater. Struct. 2016, 25, 95019. [Google Scholar] [CrossRef]
- Jansen, Y.; Karrer, T.; Borchers, J. MudPad: Localized Tactile Feedback on Touch Surfaces. In Proceedings of the UIST’10, New York, NY, USA, 3–6 October 2010. [Google Scholar]
- Yang, T.H.; Kwon, H.J.; Lee, S.S. Development of a miniature tunable stiffness display using MR fluids for haptic application. Sens. Actuators Phys. 2010, 163, 180–190. [Google Scholar] [CrossRef]
- Ryu, S.; Yang, T.H.; Kim, S.Y. Design of a new miniature haptic button based on magnetorheological fluids. In Proceedings of the IEEE International Conference on Automation Science and Engineering (CASE), Seoul, Republic of Korea, 20–24 August 2012; pp. 121–124. [Google Scholar]
- Ishizuka, H.; Miki, N. Development of a tactile display with 5 mm resolution using an array of magnetorheological fluid. Jpn. J. Appl. Phys. 2017, 56, 06GN19. [Google Scholar] [CrossRef]
- Muzakkir, S.M.; Kumar, D. Analysis of a magnetorheological brake with a single low carbon steel disc using ANSYS. In Proceedings of the 2017 International Conference on Innovative Mechanisms for Industry Applications (ICIMIA), Bengaluru, India, 21–23 February 2017; pp. 717–719. [Google Scholar]
- Wang, W.; Li, H.; Xiao, M. Design method and experiment of robot joint flexible drive based on magnetorheological fluid. In Proceedings of the 2020 5th International Conference on Automation, Control and Robotics Engineering (CACRE), Dalian, China, 19–20 September 2020; pp. 140–144. [Google Scholar]
- Park, Y.J.; Choi, S.B. A new tactile transfer cell using magnetorheological materials for robot-assisted minimally invasive surgery. Sensors 2021, 21, 3034. [Google Scholar] [CrossRef] [PubMed]
- Park, Y.J.; Lee, E.S.; Choi, S.B. A Cylindrical Grip Type of Tactile Device Using Magneto-Responsive Materials Integrated with Surgical Robot Console: Design and Analysis. Sensors 2022, 22, 1085. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.S.; Fan, J.J.; Gu, S.X. A Novel Master Haptic Interface Based on MR-Fluids for Endovascular Catheterization. In Proceedings of the 2022 IEEE International Conference on Mechatronics and Automation (ICMA), Guilin, China, 7–10 August 2022; pp. 1269–1274. [Google Scholar]
- Tae, H.Y.; Jeong, H.K. A Minature MR Actuator with Impedance Sensing Mechanism for Haptic Application. In Proceedings of the ASME 2012, Stone Mountain, GO, USA, 19–21 September 2012. [Google Scholar]
- Fournier, J.A.; Cheng, S.H. Impact of Damper Stiffness and Damper Support Stiffness on the Efficiency of a Linear Viscous Damper in Controlling Stay Cable Vibrations. J. Bridge Eng. 2014, 19, 4. [Google Scholar] [CrossRef]
- Onozuka, Y.; Minoru, O.; Manabu, O. Rendering friction and viscosity using a wearable 4 degrees of freedom force feedback device with magnetorheological fluid clutches and pneumatic artificial muscles. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 705–711. [Google Scholar]
- Sahin, H.; Liu, Y.; Wang, X. Full-scale magnetorheological fluid dampers for heavy vehicle rollover. J. Intell. Mater. Syst. Struct. 2007, 18, 1161–1167. [Google Scholar] [CrossRef]
- Vatandoost, H.; Norouzi, M.; Alehashem, S.M.S. A novel phenomenological model for dynamic behavior of magnetorheological elastomers in tension-compression mode. J. Smart Mater. Struct. 2017, 26, 065011. [Google Scholar] [CrossRef]
- Dutra, R.M.A.; Andrade, D. Magnetorheological fluid in prostheses: A state-of-the-art review. J. Intell. Mater. Syst. Struct. 2024, 35, 485–516. [Google Scholar] [CrossRef]
- Zhang, Y.Z.; Zou, J.J.; Wang, H.J. A single-layer less-wires stretchable wearable keyboard based on pressure switch conductive textile. Smart Mater. Struct. 2022, 31, 105008. [Google Scholar] [CrossRef]
- Zhang, J.H.; Du, W.F. A visualized flows analysis of postponed-set mortar with Bingham liquid in a single-screw extruder. In Proceedings of the 2010 International Conference on Mechanic Automation and Control Engineering, Wuhan, China, 26–28 June 2010; pp. 6287–6291. [Google Scholar]
- Smith, W.R.; Wissink, J.G. Parameterization of travelling waves in plane Poiseuille flow. J. Appl. Math. 2014, 79, 22–32. [Google Scholar] [CrossRef][Green Version]
- Chen, Y.; Gao, J.; Chen, X. Comparison of the break-up behaviors of newton and shear thinning non-newton fluid in jet dispensing for LED packaging. In Proceedings of the 2015 16th International Conference on Electronic Packaging Technology (ICEPT), Changsha, China, 11–14 August 2015; pp. 1029–1032. [Google Scholar]
- Venczel, M.; Bognár, G.; Veress, A. Temperature-Dependent Viscosity Model for Silicone Oil and Its Application in Viscous Dampers. J. Process. 2021, 9, 331. [Google Scholar] [CrossRef]
- Yeh, F.Y.; Chang, K.C.; Chen, T.W. The dynamic performance of a shear thickening fluid viscous damper. J. Chin. Inst. Eng. 2011, 37, 983–994. [Google Scholar] [CrossRef]
- Gokce, C.I.; Halil, I.U. Investigation of vibration damping properties of electroactive polyanthracene/silicone oil dispersions. J. Intell. Mater. Syst. Struct. 2022, 33, 641–652. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Distance | Description |
|---|---|---|
| Upper left | 1.5 mm | Distance between MRF and magnet was 1.5 mm |
| Upper right | No magnets | No magnet under MRF |
| Bottom left | 0 mm | The magnet is adjacent to MRF |
| Bottom right | 3 mm | Distance between MRF and magnet was 3 mm |
| The Distance between Magnet and Magnetorheological Fluid | Proportion (%) |
|---|---|
| 0 mm | 20 |
| 1.5 mm | 40 |
| 3 mm | 26.67 |
| No magnets | 13.33 |
| Case | Distance | Description |
|---|---|---|
| Case 1 | 0 mm | The magnet was adjacent to MRF (all four keys) |
| Case 2 | 1.5 mm | Distance between the MRF and magnet was 1.5 mm (all four keys) |
| Case 3 | 3 mm | Distance between the MRF and magnet was 3 mm (all four keys) |
| Case 4 | No magnets | No magnet under the MRF (all four keys) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, P.; Liu, S.; Zeng, T. Magnetorheological Fluid-Based Haptic Feedback Damper. Appl. Sci. 2024, 14, 3697. https://doi.org/10.3390/app14093697
Kang P, Liu S, Zeng T. Magnetorheological Fluid-Based Haptic Feedback Damper. Applied Sciences. 2024; 14(9):3697. https://doi.org/10.3390/app14093697
Chicago/Turabian StyleKang, Pei, Sijia Liu, and Tao Zeng. 2024. "Magnetorheological Fluid-Based Haptic Feedback Damper" Applied Sciences 14, no. 9: 3697. https://doi.org/10.3390/app14093697
APA StyleKang, P., Liu, S., & Zeng, T. (2024). Magnetorheological Fluid-Based Haptic Feedback Damper. Applied Sciences, 14(9), 3697. https://doi.org/10.3390/app14093697