

GNSS and LiDAR Integrated Navigation Method in Orchards with Intermittent GNSS Dropout




Abstract
1. Introduction
2. Materials and Methods
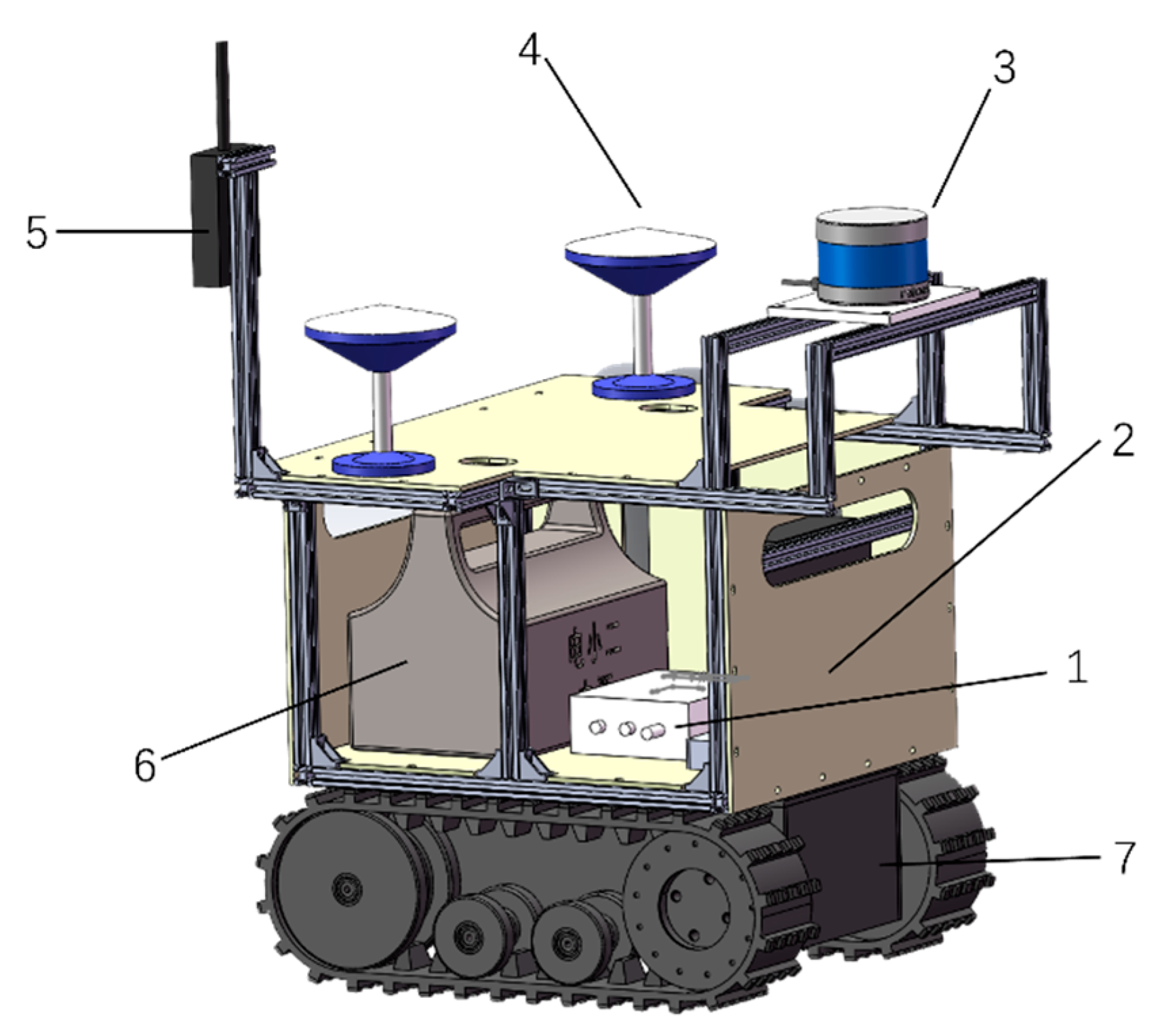
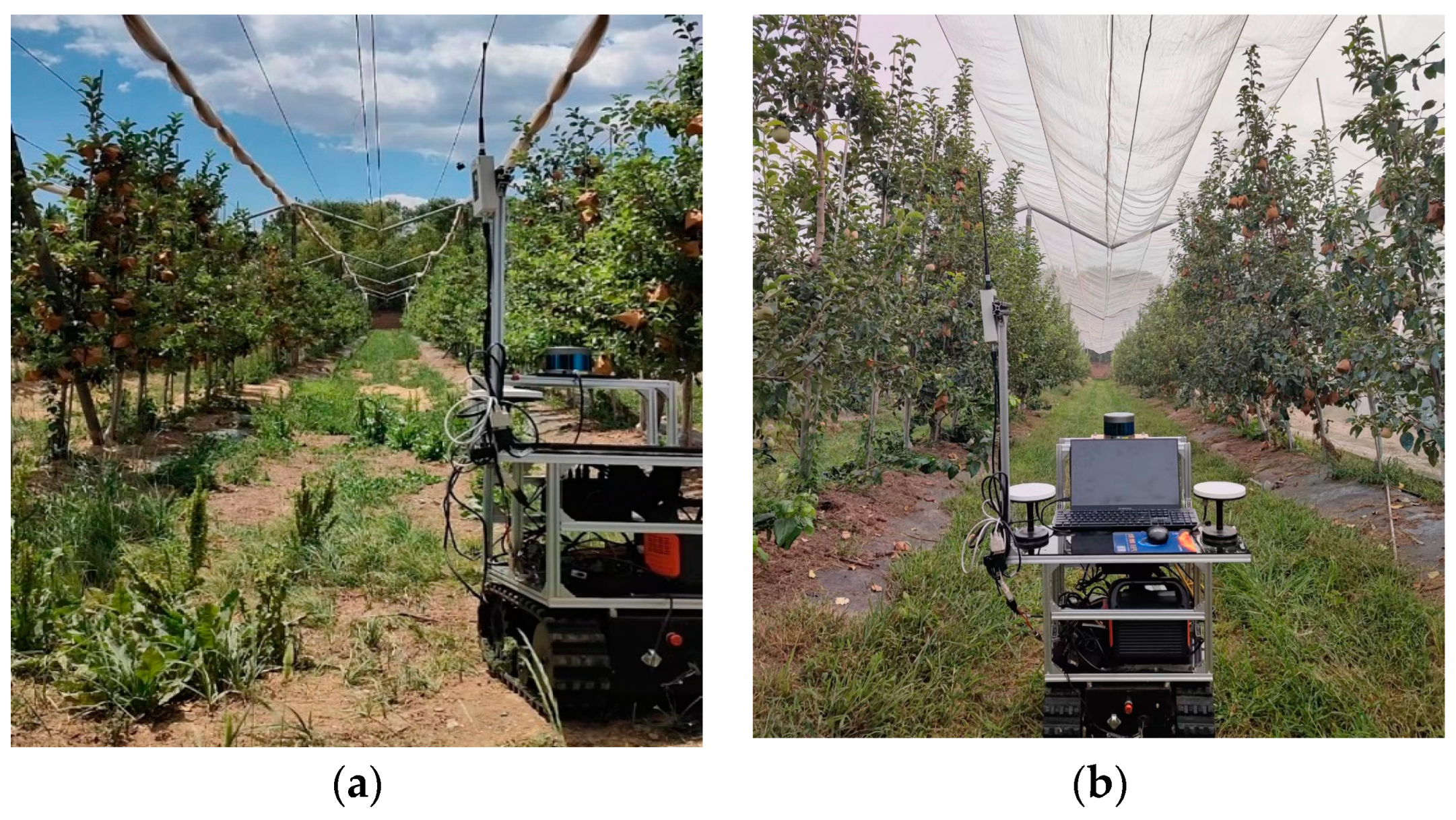
2.1. Orchard Robotic Vehicle Design
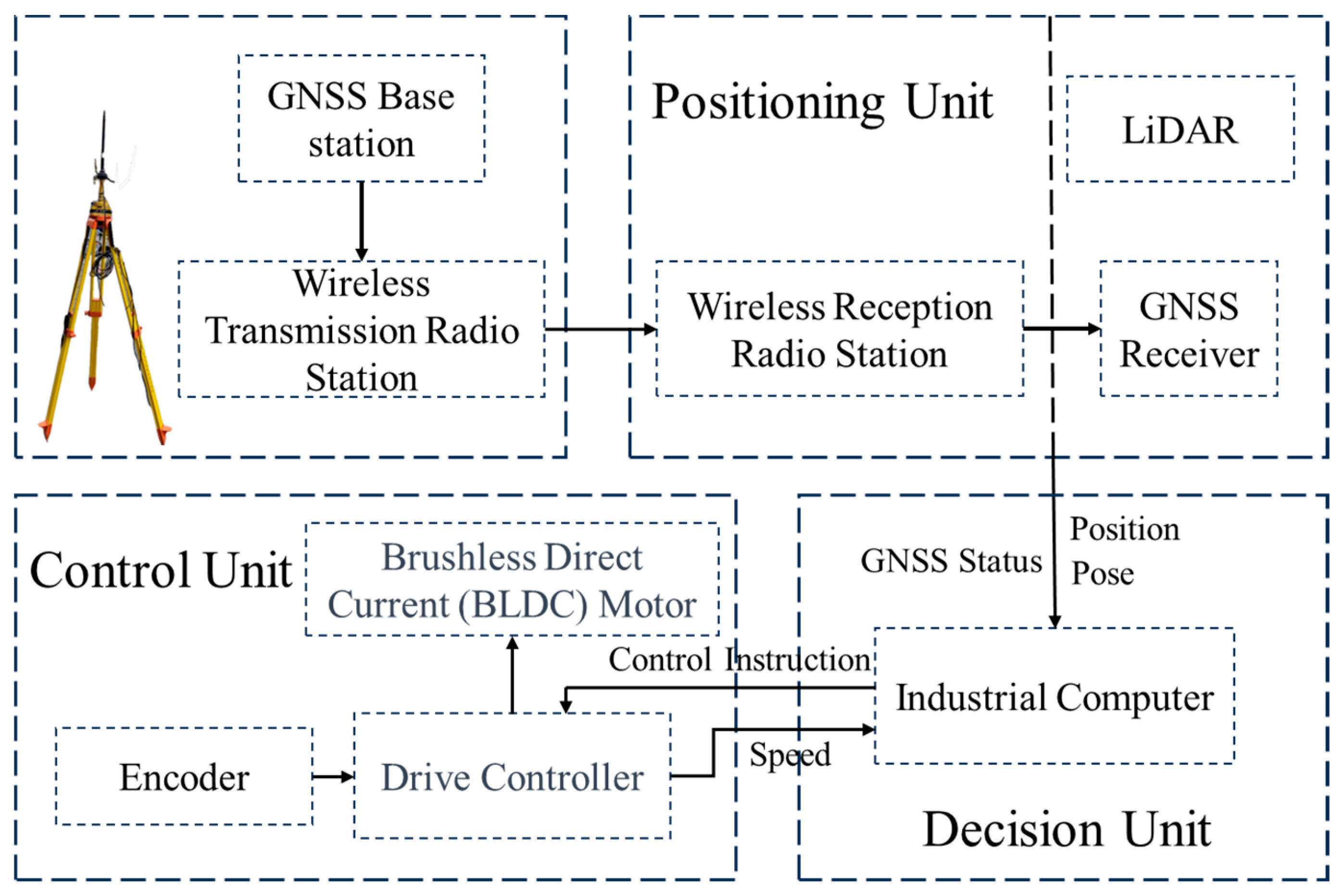
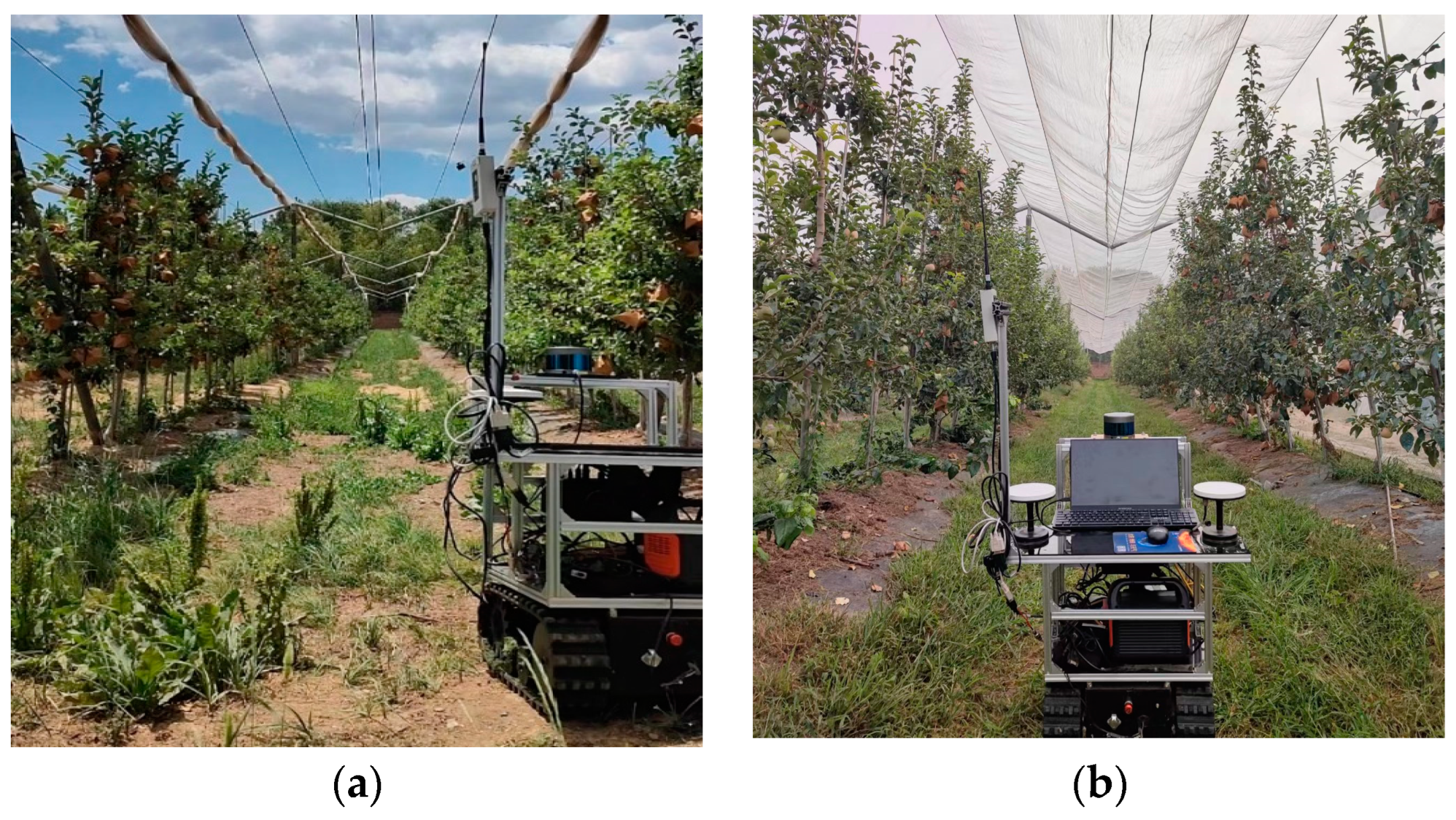
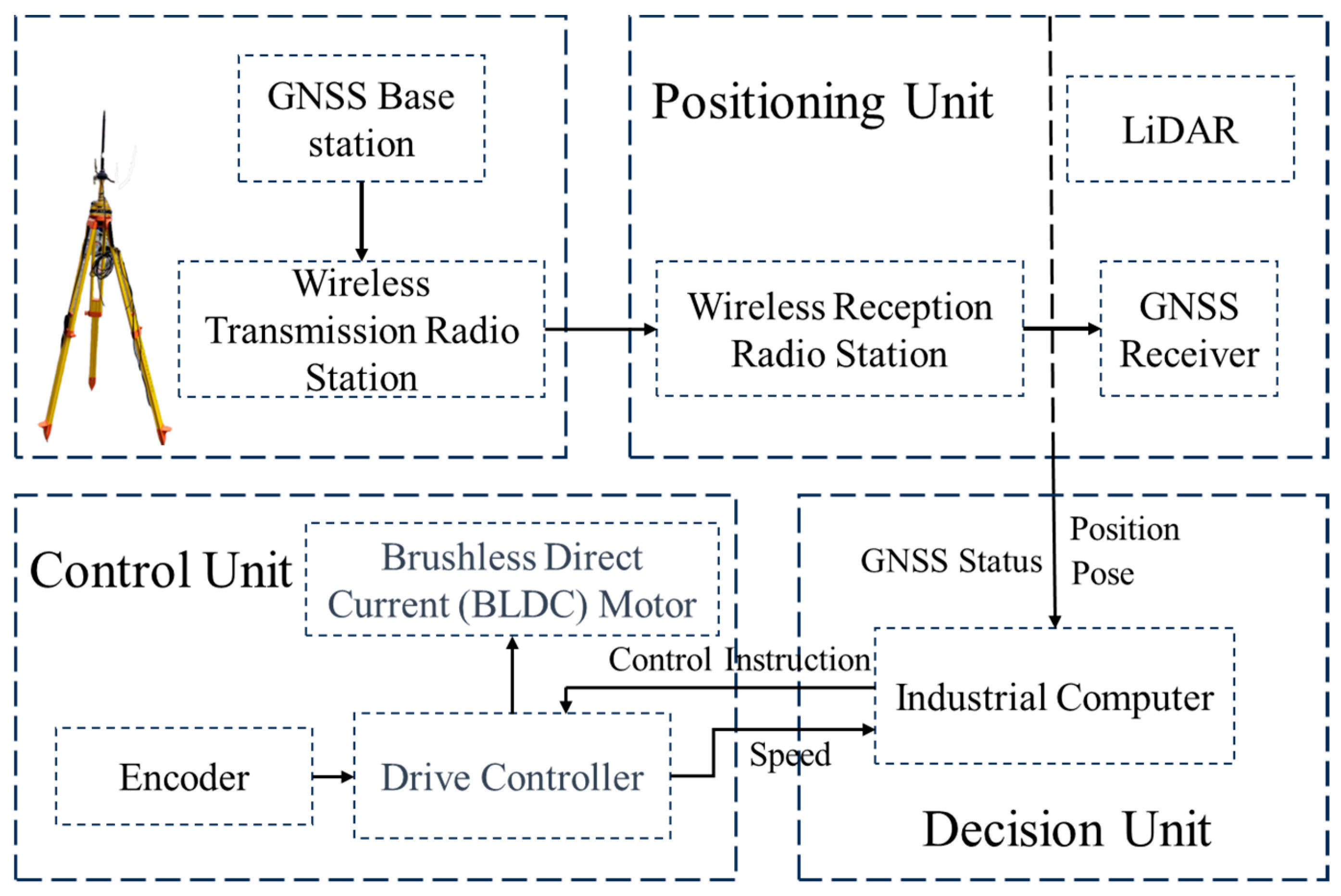
2.1.1. Hardware Integration of the Orchard Robotic Vehicle
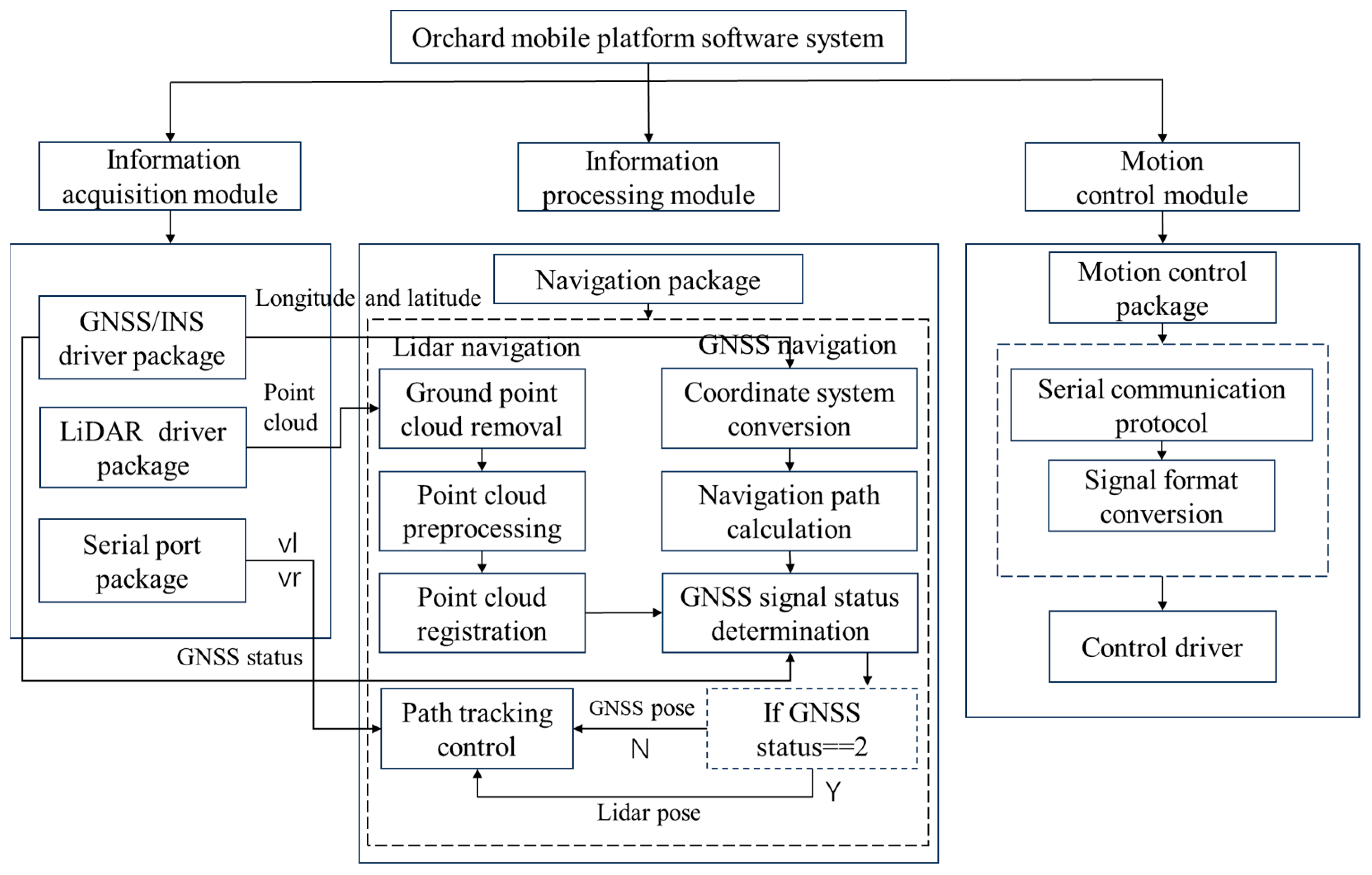
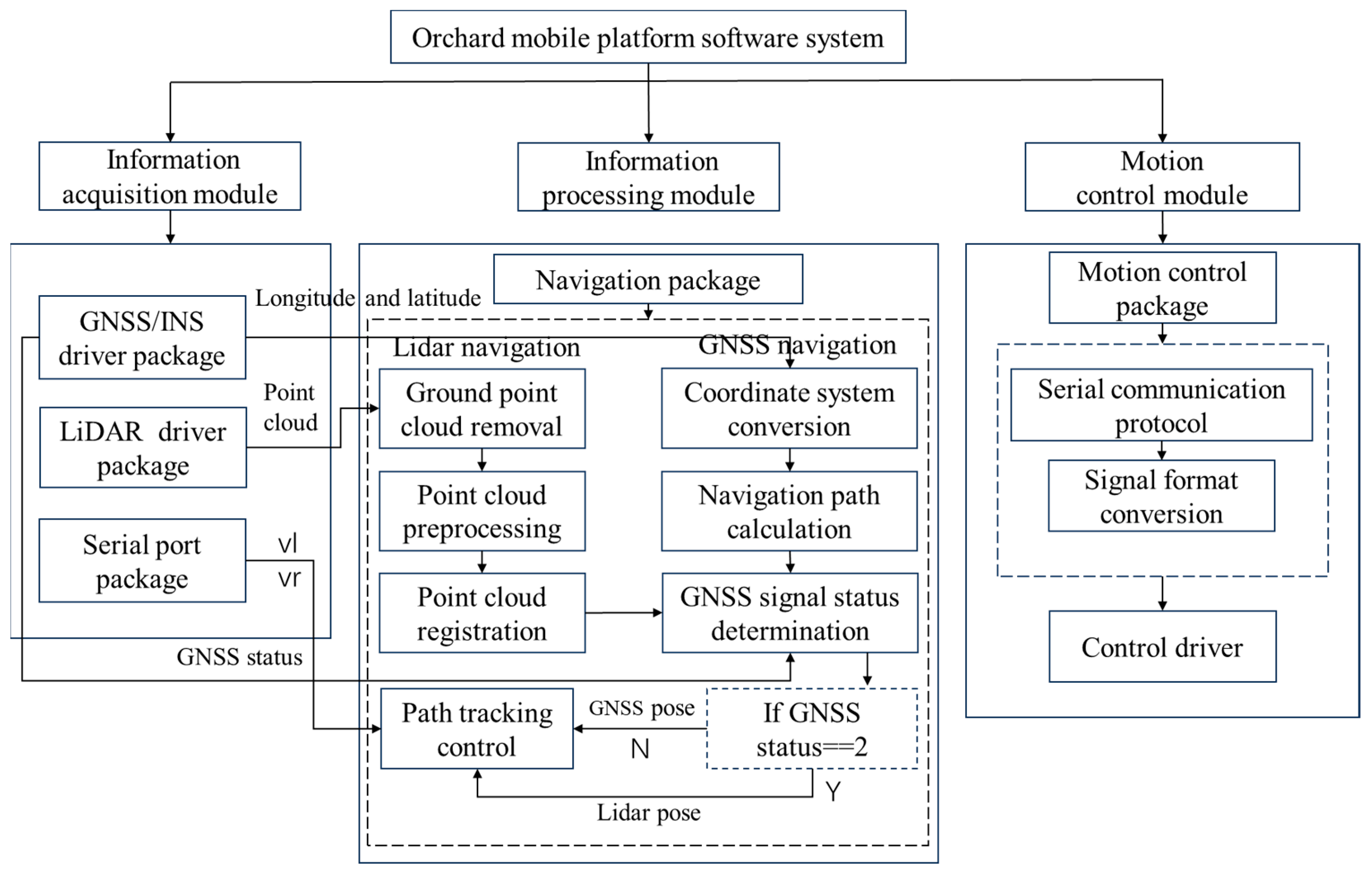
2.1.2. Navigation System Design of the Orchard Robotic Vehicle
2.2. GNSS-LiDAR Fusion Positioning Principle
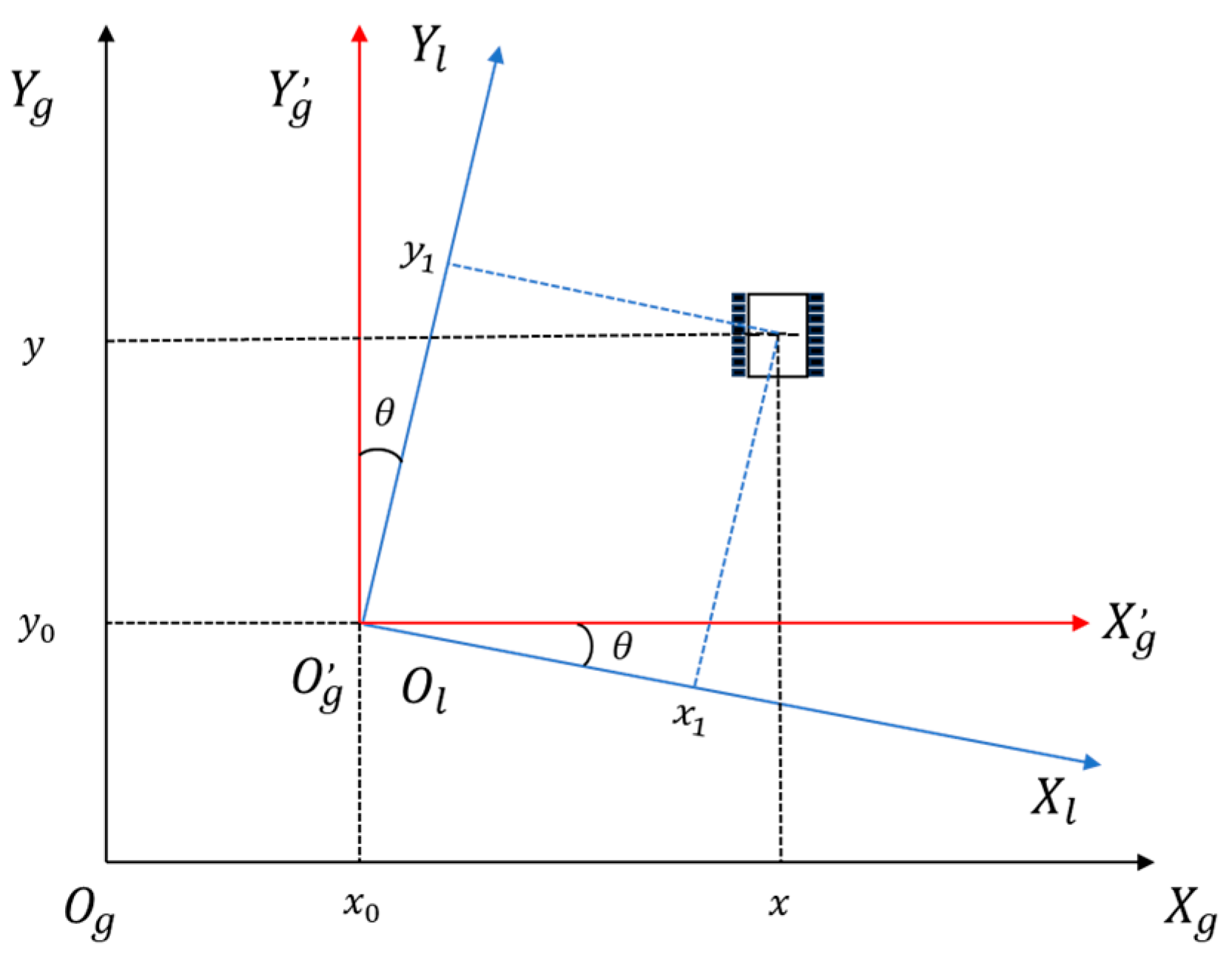
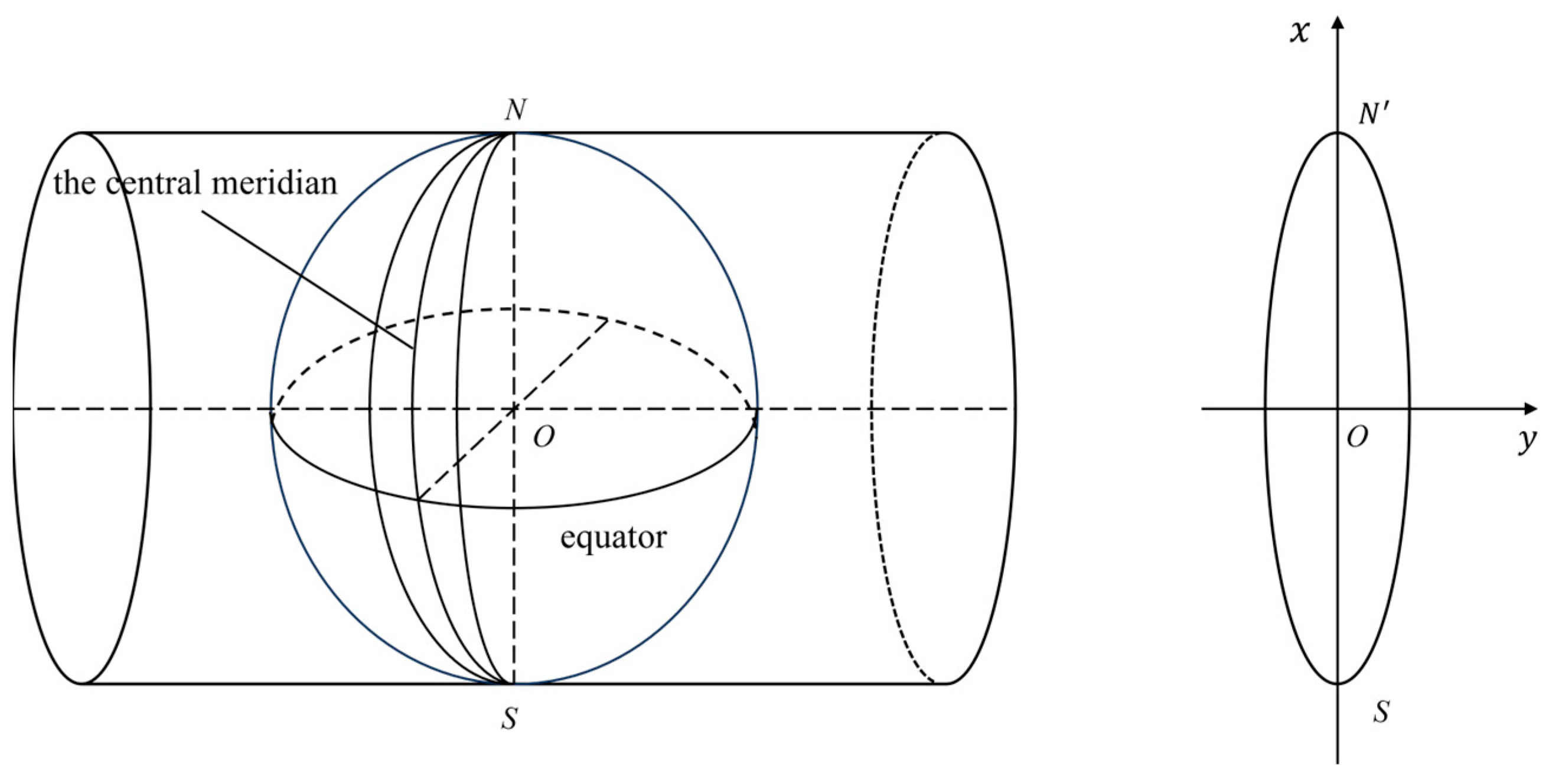
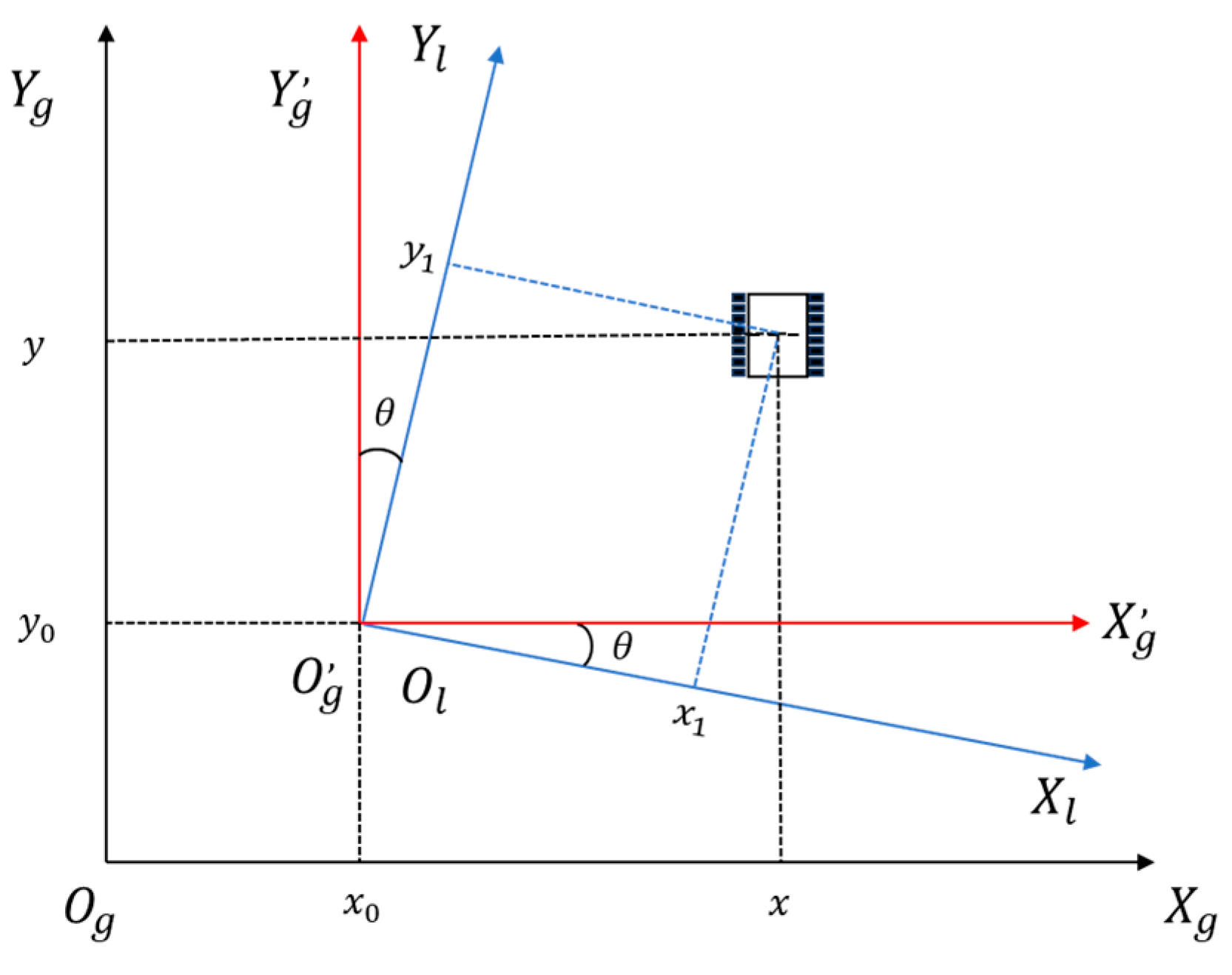
2.2.1. Coordinate System Integration of GNSS and LiDAR
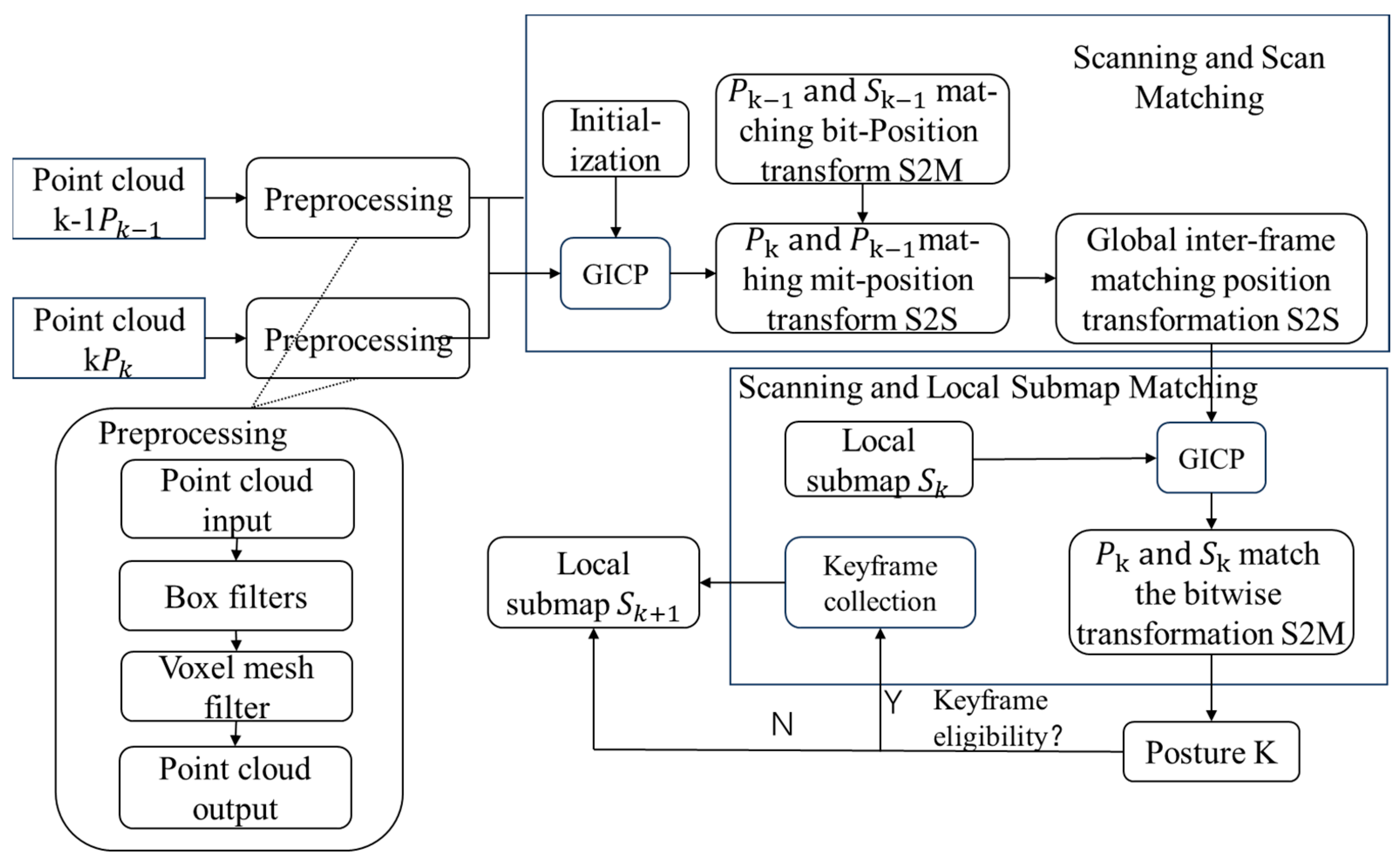
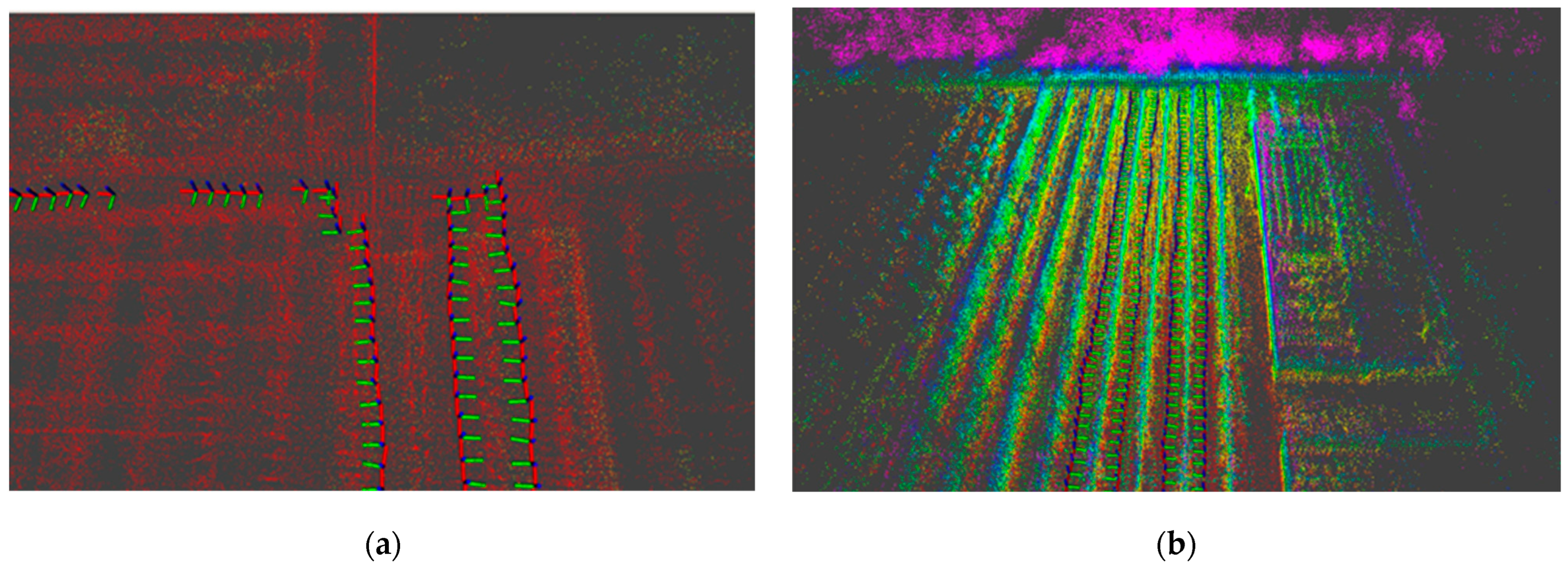
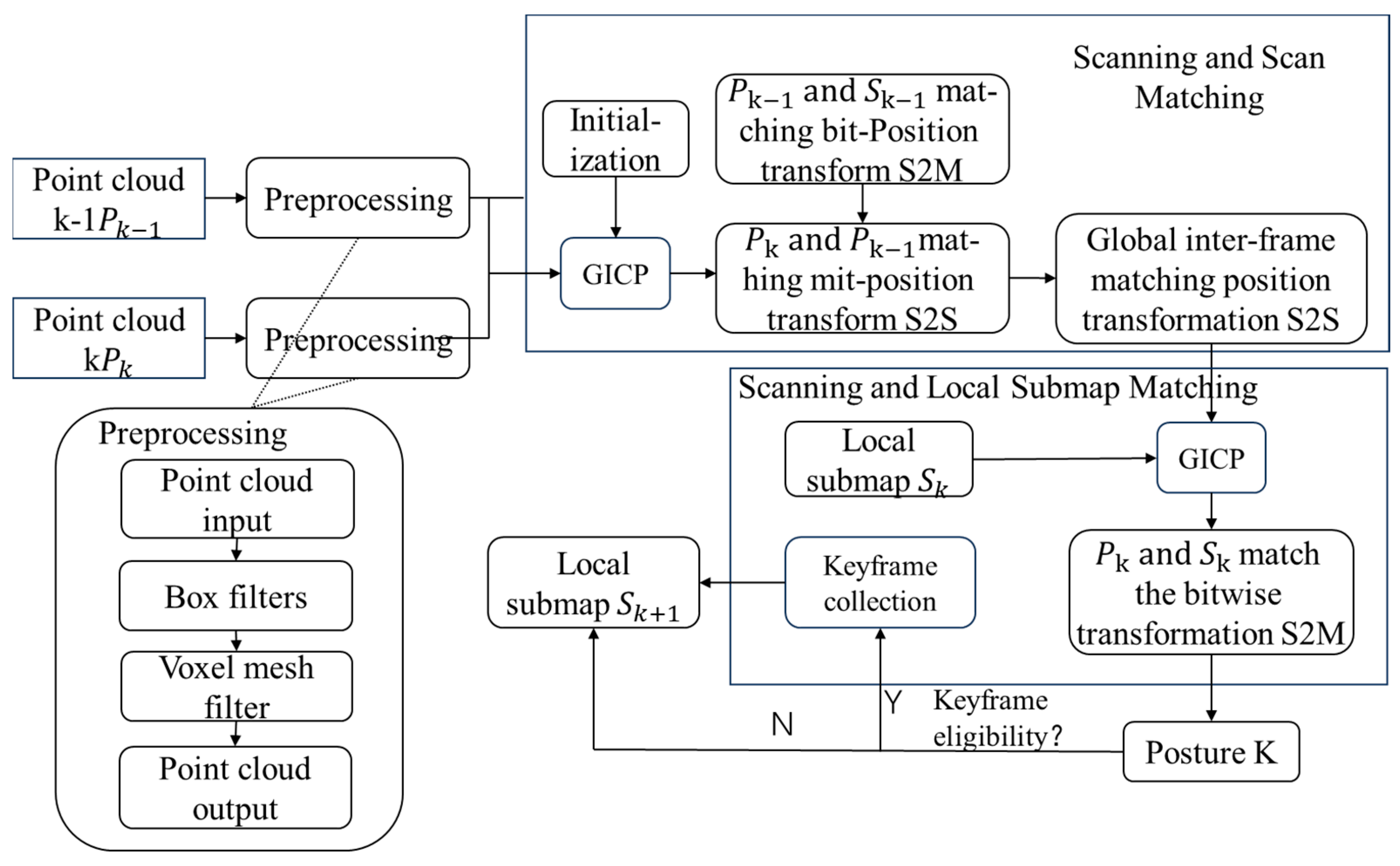
2.2.2. GNSS-Corrected Laser Odometer
2.2.3. GNSS-LiDAR Orchard Positioning Scheme Based on Dynamic Switching
2.3. Path-Tracking Control System
2.3.1. Kinematic Model of Robotic Vehicle
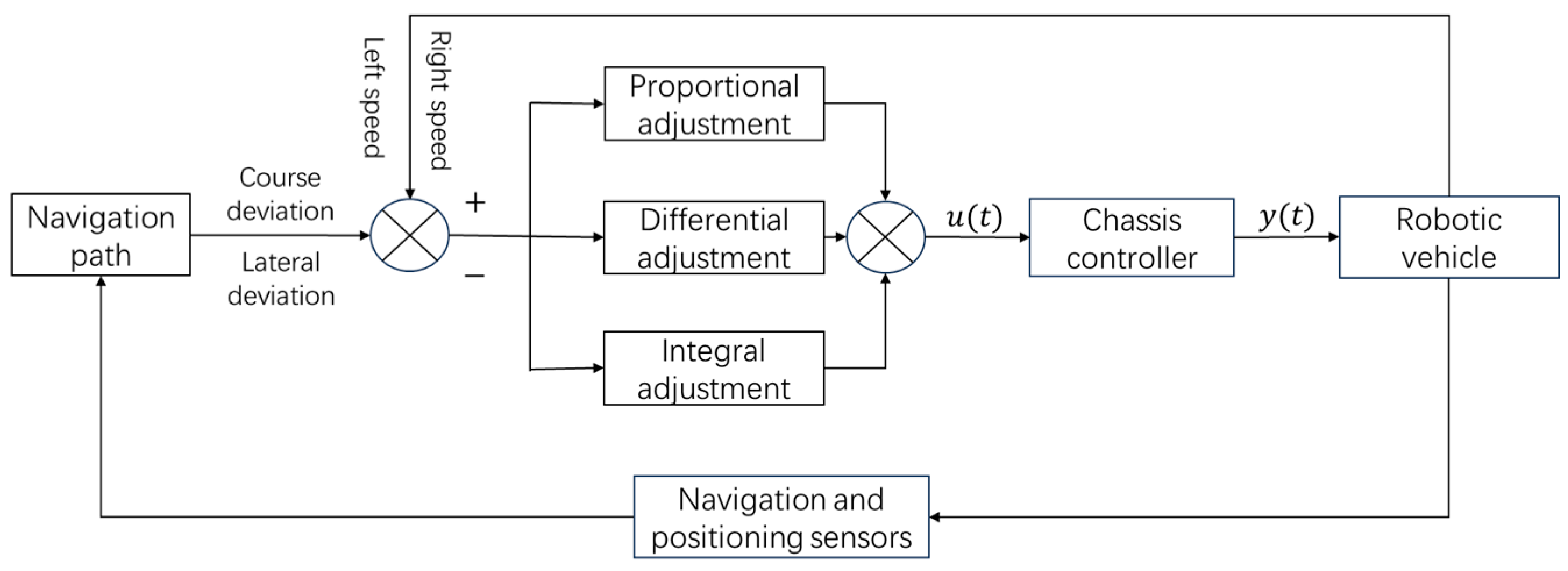
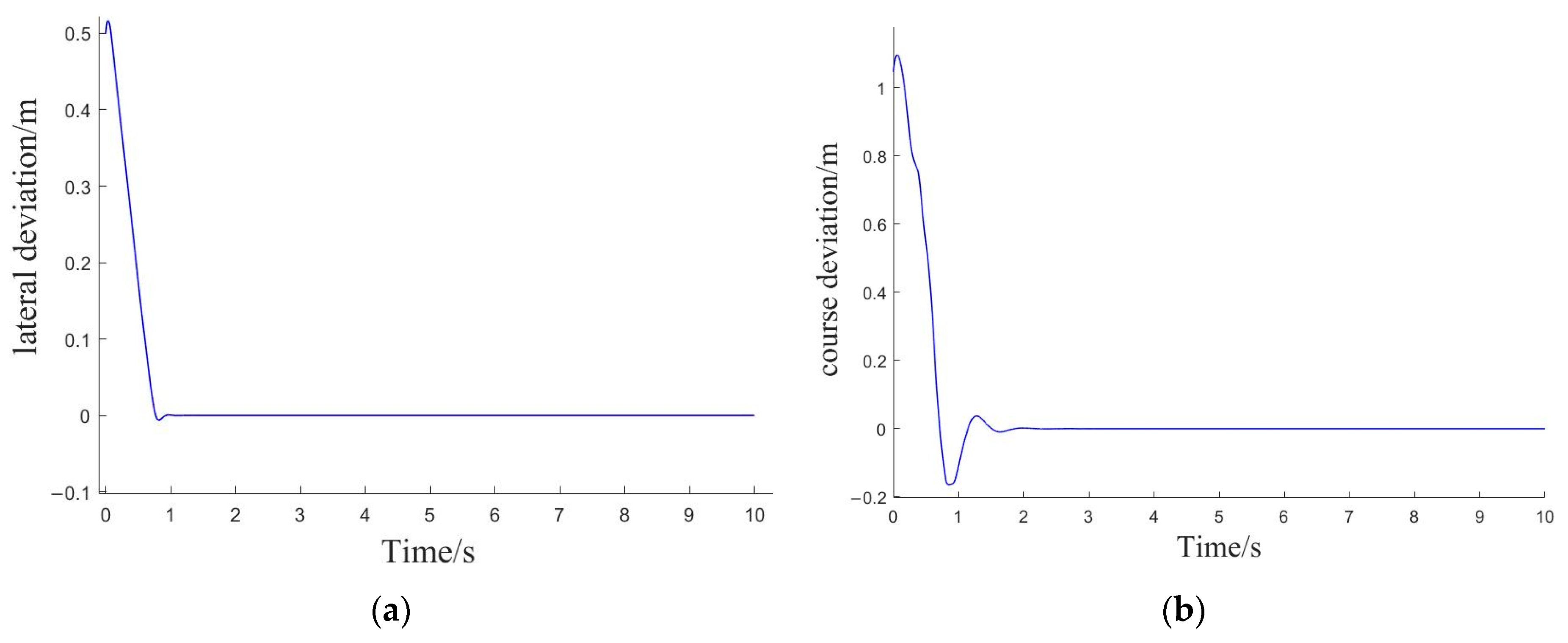
2.3.2. PID-Based Path-Tracking Algorithm
3. Results
3.1. Experiment Setting
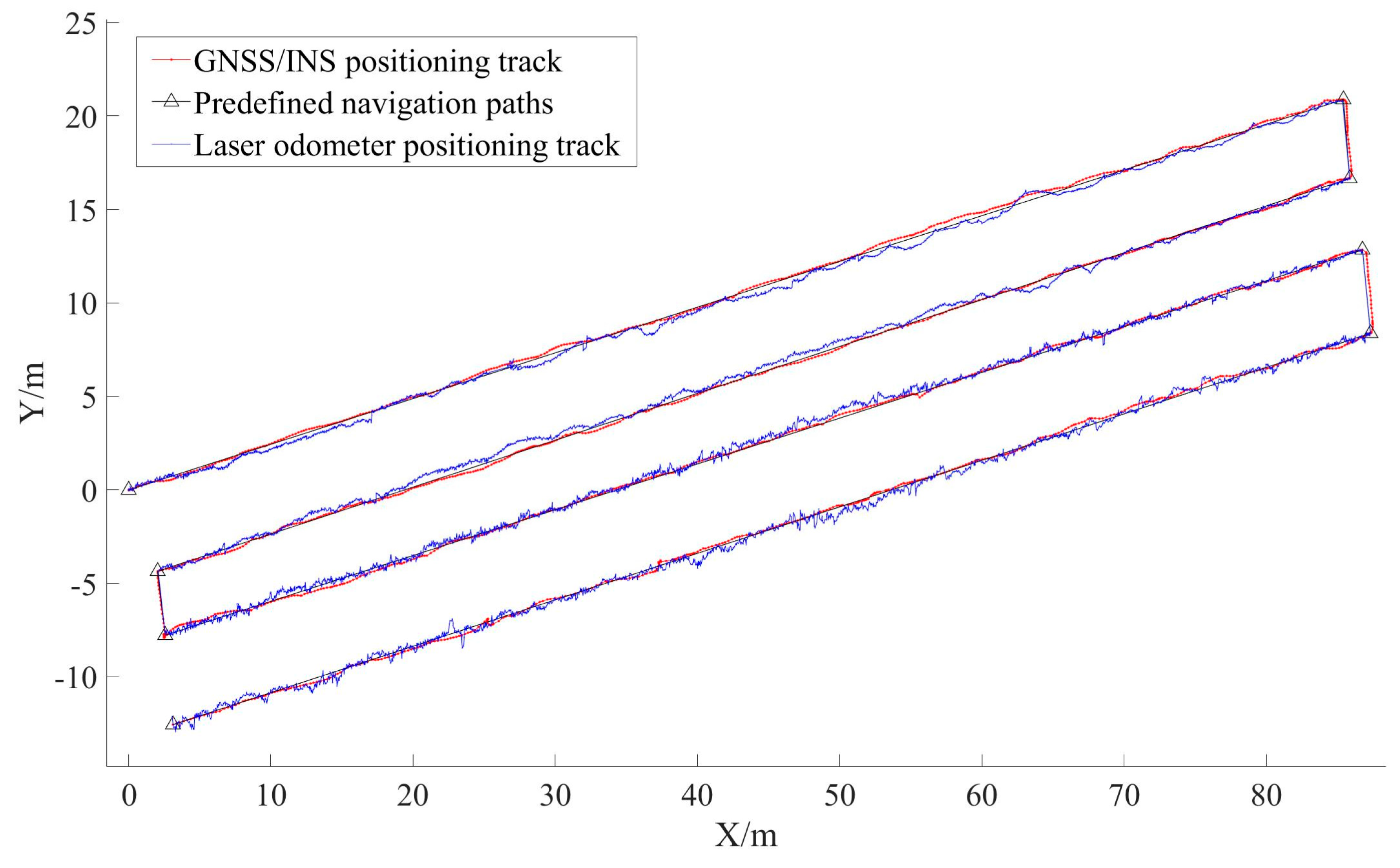
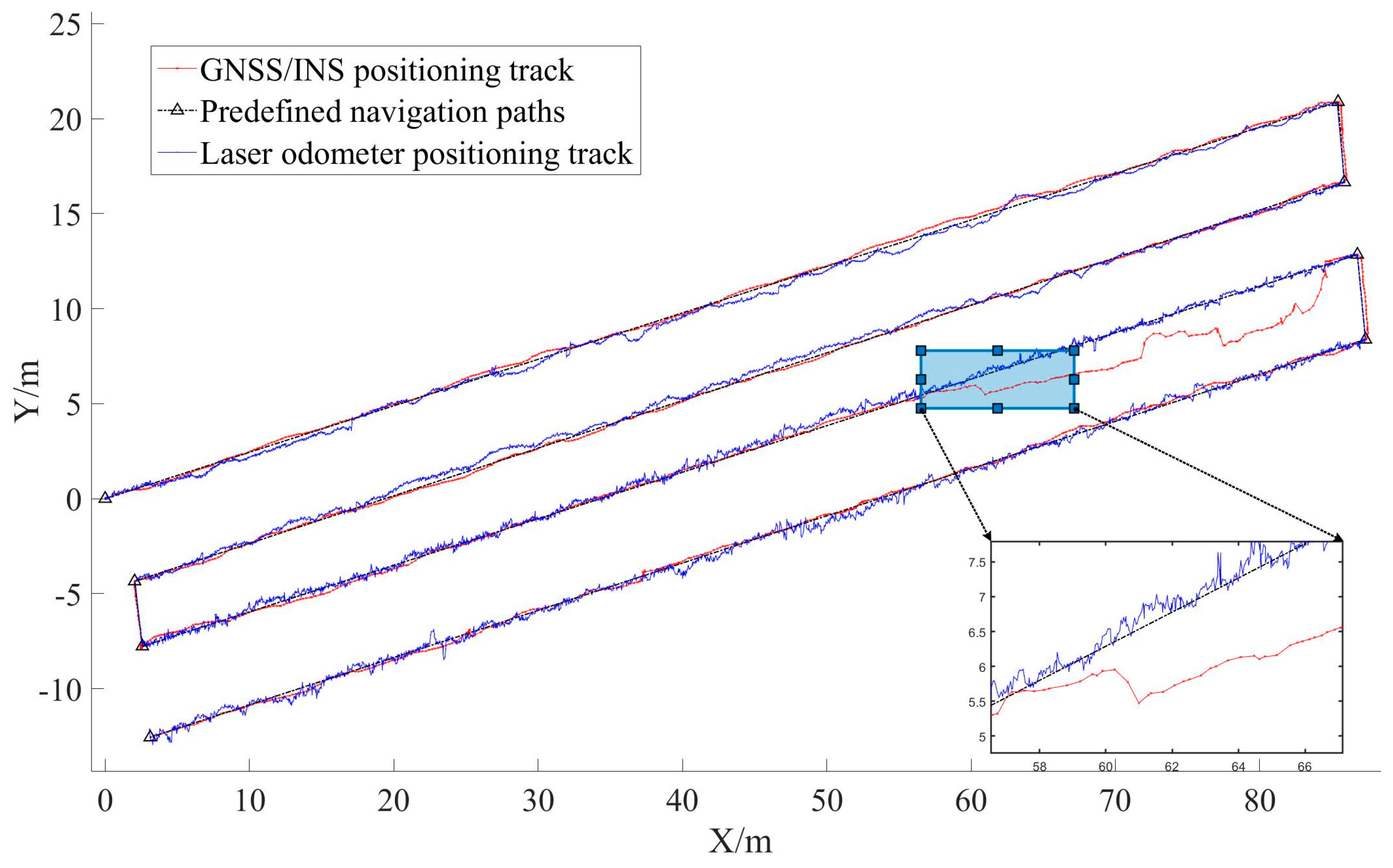
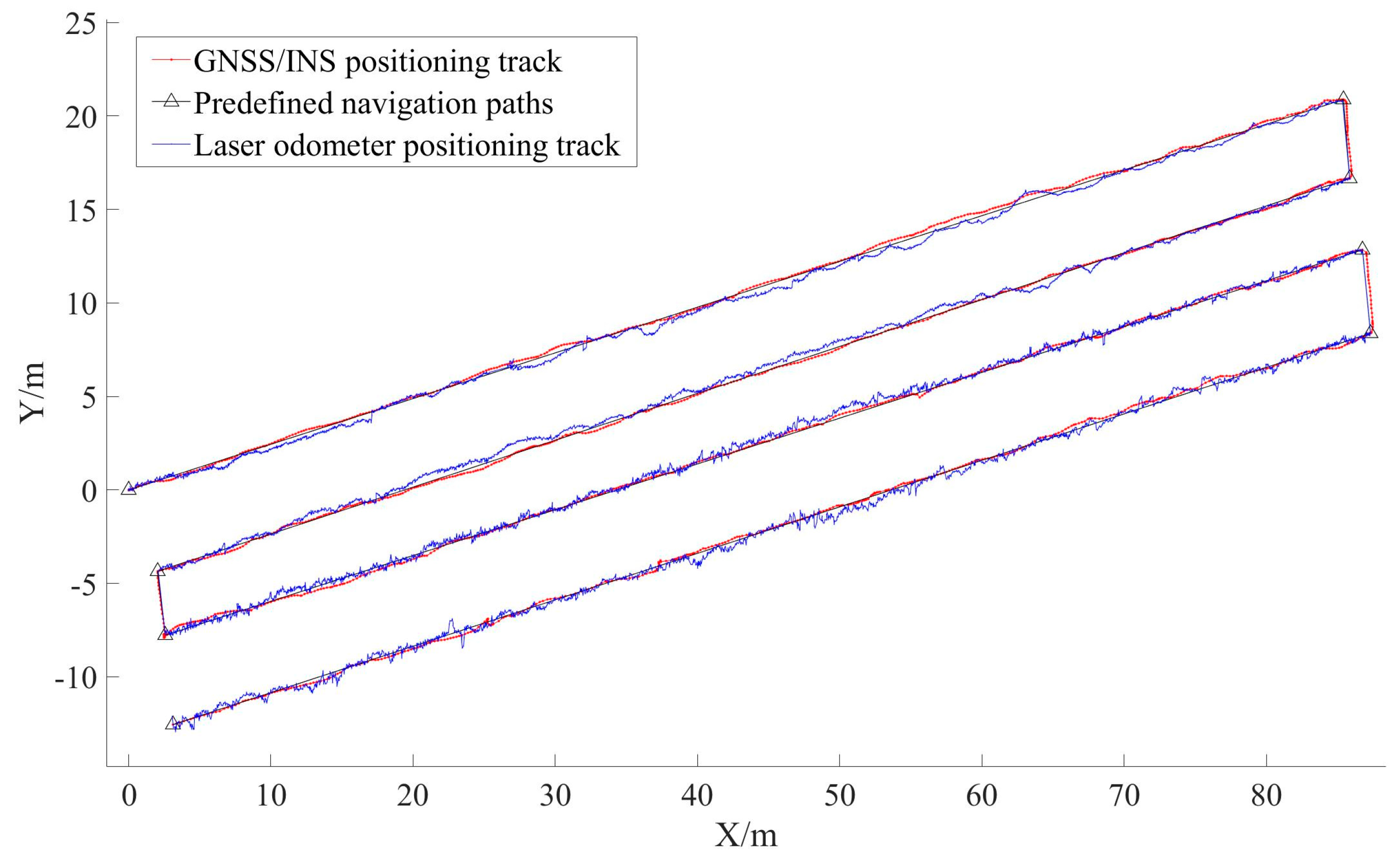
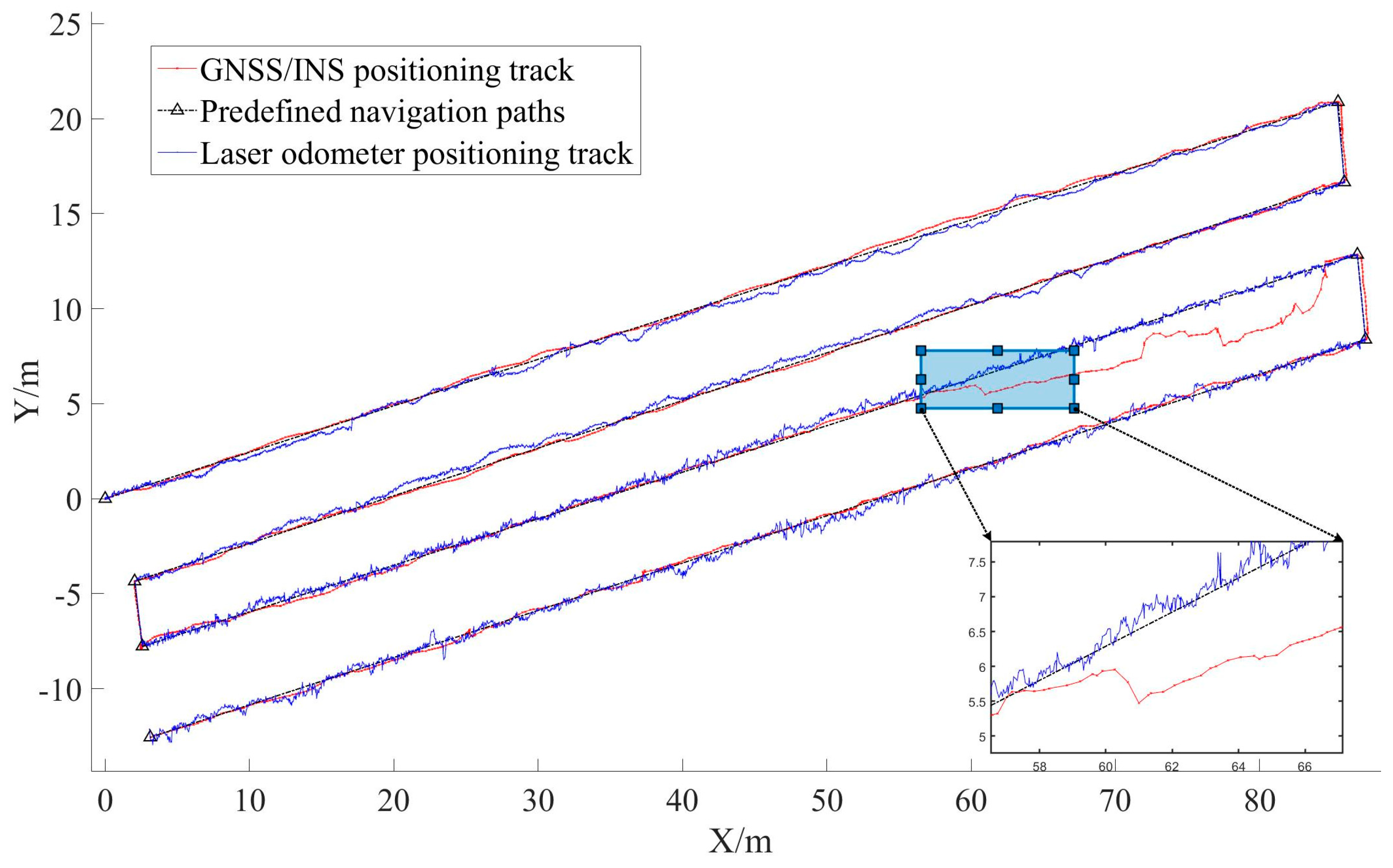
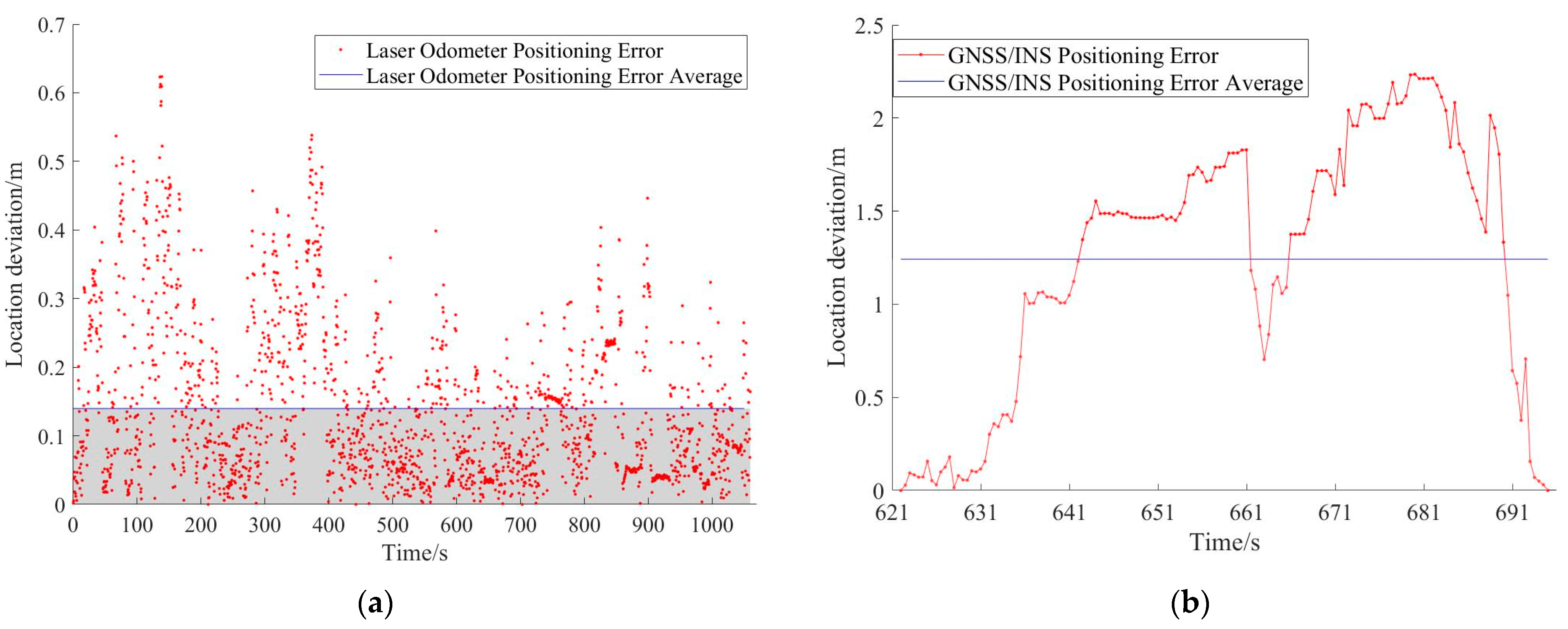
3.2. Navigation Test with Unobstructed GNSS
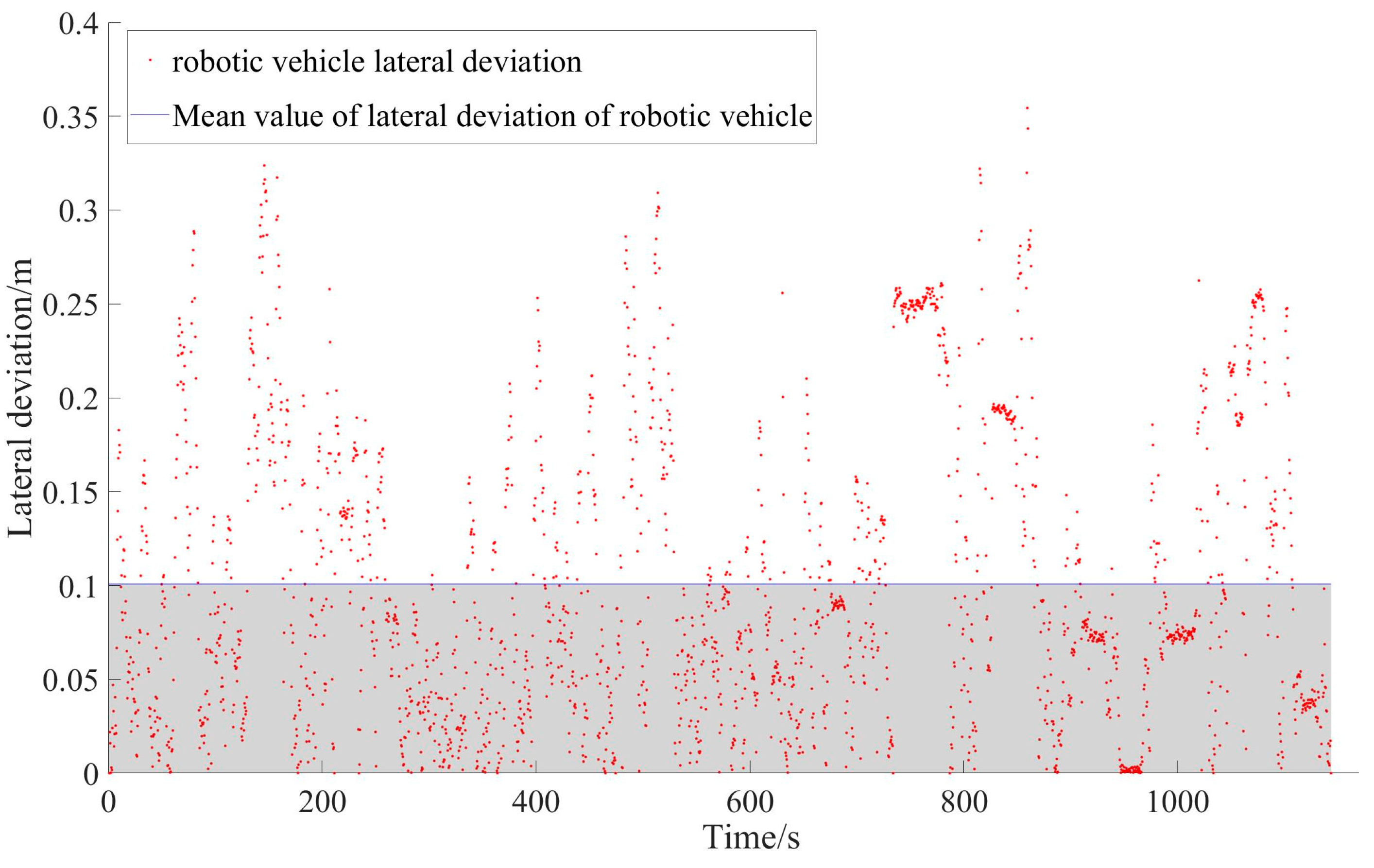
3.3. Navigation Test with Intermittent GNSS Dropout
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dou, J.H.; Chen, Z.Y.; Zhai, C.Y.; Zou, W.; Song, J.; Feng, F.; Zhang, Y.L.; Wang, X. Research Progress on Autonomous Navigation Technology for Orchard Intelligent Equipment. Trans. Chin. Soc. Agric. Mach 2024, 68, 1–25. [Google Scholar]
- Zhao, Y.; Xiao, H.; Mei, S.; Song, Z.; Ding, W.; Jing, Y. Current status and development strategies of orchard mechanization production in China. J. China Agric. Univ. 2017, 22, 116–127. [Google Scholar]
- Liu, J. Research Progress Analysis of Robotic Harvesting Technologies in Greenhouse. Trans. Chin. Soc. Agric. Mach 2017, 48, 1–18. [Google Scholar]
- Vougioukas, S.; Spanomitros, Y.; Slaughter, D. Dispatching and Routing of Robotic Crop-transport Aids for Fruit Pickers using Mixed Integer Programming. In Proceedings of the American Society of Agricultural and Biological Engineers, Dallas, TX, USA, 29 July–1 August 2012; pp. 3423–3432. [Google Scholar]
- Yin, X.; Wang, Y.; Chen, Y.; Jin, C.; Du, J. Development of autonomous navigation controller for agricultural vehicles. Int. J. Agric. Biol. Eng. 2020, 13, 70–76. [Google Scholar] [CrossRef]
- Nørremark, M.; Griepentrog, H.W.; Nielsen, J.; Søgaard, H.T. The development and assessment of the accuracy of an autonomous GPS-based system for intra-row mechanical weed control in row crops. Biosyst. Eng. 2008, 101, 396–410. [Google Scholar] [CrossRef]
- Jilek, T. Autonomous field measurement in outdoor areas using a mobile robot with RTK GNSS. IFAC IEEE Conf. Program. Devices Embed. Syst. 2015, 48, 480–485. [Google Scholar] [CrossRef]
- Han, J.H.; Park, C.H.; Park, Y.J.; Kwon, J.H. Preliminary Results of the Development of a Single Frequency GNSS RTK-Based Autonomous Driving System for a Speed Sprayer. J. Sens. 2019, 2, 1–9. [Google Scholar] [CrossRef]
- Fresk, E.; Nikolakopoulos, G.; Gustafsson, T. A Generalized Reduced-Complexity Inertial Navigation System for Unmanned Aerial Vehicles. IEEE Trans. Control Syst. Technol. 2016, 25, 192–207. [Google Scholar] [CrossRef]
- Hwang, S.Y.; Lee, J.M. Estimation of Attitude and Position of Moving Objects Using Multi-filtered Inertial Navigation System. Trans. Korean Inst. Electr. Eng. 2011, 60, S446–S452. [Google Scholar]
- Hu, L.; Wang, Z.; Wang, P.; He, J.; Jiao, J.; Wang, C.; Li, M. Agricultural robot positioning system based on laser sensing. Trans. CSAE 2023, 39, 1–7. [Google Scholar]
- Freitas, G.; Zhang, J.; Hamner, B.; Bergerman, M.; Kantor, G. A low-cost, practical localization system for agricultural vehicles. In Proceedings of the Intelligent Robotics and Applications: 5th International Conference, ICIRA 2012, Montreal, QC, Canada, 3–5 October 2012; pp. 365–375. [Google Scholar]
- Zhou, J.; Hu, C. Inter-row Localization Method for Agricultural Robot Working in Close Planting Orchard. Trans. Chin. Soc. Agric. Mach. 2015, 46, 22–28. [Google Scholar]
- Shalal, N.; Low, T.; McCarthy, C.; Hancock, C. Orchard mapping and mobile robot localisation using on-board camera and laser scanner data fusion–Part B: Mapping and localisation. Comput. Electron. Agric. 2015, 119, 267–278. [Google Scholar] [CrossRef]
- Zhang, S.; Guo, C.; Gao, Z.; Sugirbay, A.; Chen, J.; Chen, Y. Research on 2D Laser Automatic Navigation Control for Standardized Orchard. Appl. Sci. 2020, 10, 2763. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, W.; Qureshi, W.S.; Gao, C.; Zhang, C.; Li, W. Autonomous navigation for a wolfberry picking robot using visual cues and fuzzy control. Inf. Process. Agric 2021, 8, 15–26. [Google Scholar] [CrossRef]
- Huang, Y.; Fu, J.; Xu, S.; Han, T.; Liu, Y. Research on Integrated Navigation System of Agricultural Machinery Based on RTK-BDS/INS. Agriculture 2022, 12, 1169. [Google Scholar] [CrossRef]
- Sun, B.; Yeary, M.; Sigmarsson, H.H.; Mcdaniel, J.W. Fine resolution position estimation using Kalman Filtering. In Proceedings of the 2019 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Auckland, New Zealand, 20–23 May 2019; pp. 1–5. [Google Scholar]
- Qian, C.; Liu, H.; Tang, J.; Chen, Y.; Kaartinen, H.; Kukko, A.; Zhu, L.; Liang, X.; Chen, L.; Hyyppä, J. An Integrated GNSS/INS/LiDAR-SLAM Positioning Method for Highly Accurate Forest Stem Mapping. Remote Sens. 2017, 9, 3. [Google Scholar] [CrossRef]
- Chiang, K.W.; Duong, T.T.; Liao, J.K. The Performance Analysis of a Real-Time Integrated INS/GPS Vehicle Navigation System with Abnormal GPS Measurement Elimination. Sensors 2013, 13, 10599–10622. [Google Scholar] [CrossRef] [PubMed]
- Ball, D.; Upcroft, B.; Wyeth, G.; Corke, P.; English, A.; Ross, P.; Patten, T.; Fitch, R.; Sukkarieh, S.; Bate, A. Vision-based obstacle detection and navigation for an agricultural robot. J. Field Robot. 2016, 33, 1107–1130. [Google Scholar] [CrossRef]
- Zuo, Z.; Yang, B.; Li, Z.; Zhang, T. A GNSS/IMU/vision ultra-tightly integrated navigation system for low altitude aircraft. IEEE Sens. J. 2022, 22, 11857. [Google Scholar] [CrossRef]
- Chu, T.; Guo, N.; Backén, S.; Akos, D. Monocular Camera/IMU/GNSS Integration for Ground Vehicle Navigation in Challenging GNSS Environments. Sensors 2012, 12, 3162–3185. [Google Scholar] [CrossRef]
- Shamsudin, A.U.; Ohno, K.; Hamada, R.; Kojima, S.; Westfechtel, T.; Suzuki, T.; Okada1, Y.; Tadokoro, S.; Fujita, J.; Amano, H. Consistent map building in petrochemical complexes for firefighter robots using SLAM based on GPS and LIDAR. Robomech 2018, 5, 1–13. [Google Scholar]
- Jiang, W.; Yu, Y.; Zong, K.; Cai, B.; Rizos, C.; Wang, J.; Liu, D.; Shangguan, W. A Seamless Train Positioning System Using a Lidar-Aided Hybrid Integration Methodology. IEEE Trans. Veh. Technol 2021, 70, 6371–6384. [Google Scholar] [CrossRef]
- Elamin, A.; Abdelaziz, N.; El-Rabbany, A. A GNSS/INS/LiDAR Integration Scheme for UAV-Based Navigation in GNSS-Challenging Environments. Sensors 2022, 22, 9908. [Google Scholar] [CrossRef] [PubMed]
- Segal, A.; Haehnel, D.; Thrun, S. Generalized-ICP. In Proceedings of the Robotics: Science and Systems V, University of Washington, Seattle, DC, USA, 28 June–1 July 2009. [Google Scholar]
- Hyoseok, K.; Chang-Woo, P.; Chang-Ho, H. Alternative identification of wheeled mobile robots with skidding and slipping. Int. J. Control. Autom. Syst. 2016, 14, 1055–1062. [Google Scholar]
- Yu, S.H.; Hyun, C.H.; Kang, H.S. Robust dynamic surface tracking control for uncertain wheeled mobile robot with skidding and slipping. In Proceedings of the IEEE International Conference on Control and Robotics Engineering, Singapore, 2–4 April 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–4. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
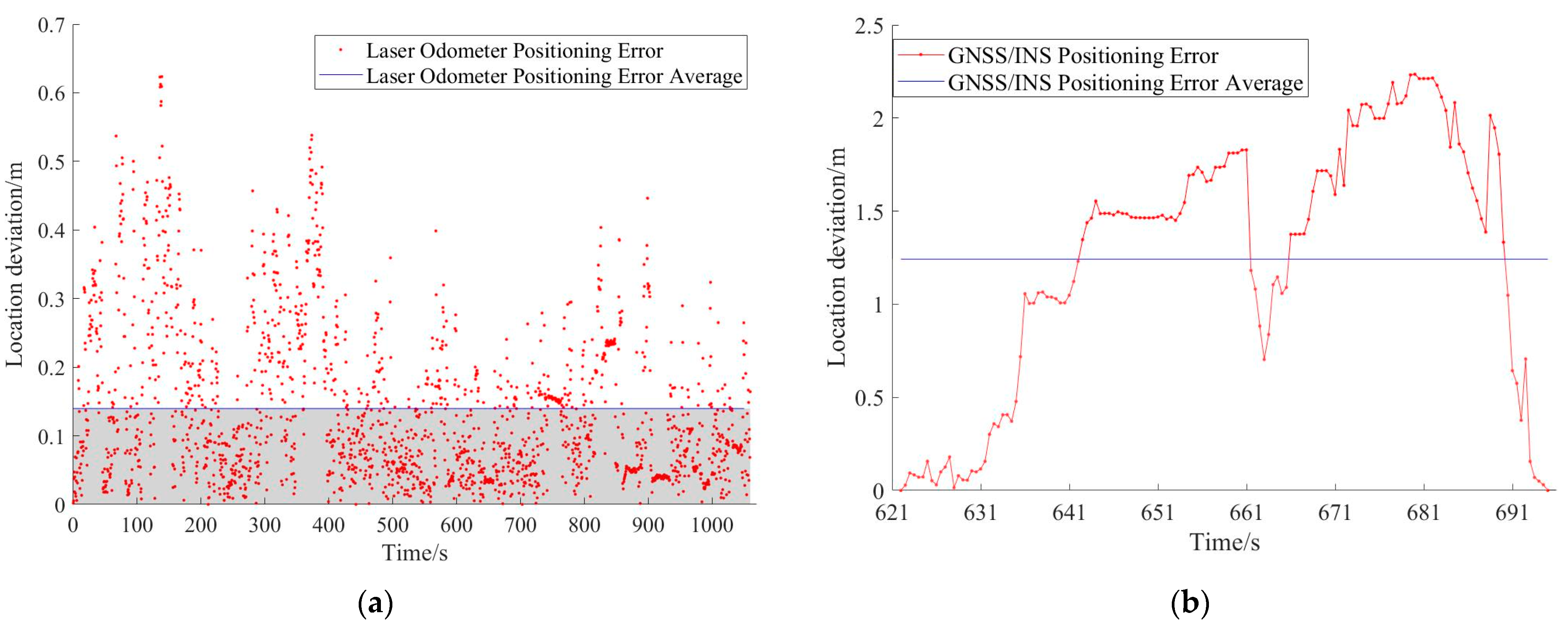
| Positioning Method | Mean (m) | Std | RMSE (m) | Max (m) |
|---|---|---|---|---|
| GNSS/INS | 1.24 | 0.6927 | 2.0195 | 2.23 |
| LiDAR Odometer | 0.14 | 0.115 | 0.0328 | 0.62 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Feng, Q.; Ji, C.; Sun, J.; Sun, Y. GNSS and LiDAR Integrated Navigation Method in Orchards with Intermittent GNSS Dropout. Appl. Sci. 2024, 14, 3231. https://doi.org/10.3390/app14083231
Li Y, Feng Q, Ji C, Sun J, Sun Y. GNSS and LiDAR Integrated Navigation Method in Orchards with Intermittent GNSS Dropout. Applied Sciences. 2024; 14(8):3231. https://doi.org/10.3390/app14083231
Chicago/Turabian StyleLi, Yilong, Qingchun Feng, Chao Ji, Jiahui Sun, and Yu Sun. 2024. "GNSS and LiDAR Integrated Navigation Method in Orchards with Intermittent GNSS Dropout" Applied Sciences 14, no. 8: 3231. https://doi.org/10.3390/app14083231
APA StyleLi, Y., Feng, Q., Ji, C., Sun, J., & Sun, Y. (2024). GNSS and LiDAR Integrated Navigation Method in Orchards with Intermittent GNSS Dropout. Applied Sciences, 14(8), 3231. https://doi.org/10.3390/app14083231