

Clutter Map Constant False Alarm Rate Mixed with the Gabor Transform for Target Detection via Monte Carlo Simulation




Abstract
1. Introduction
2. Mathematical Modeling and Analysis of the Proposed Detector Algorithm
2.1. Clutter Map CFAR Detector
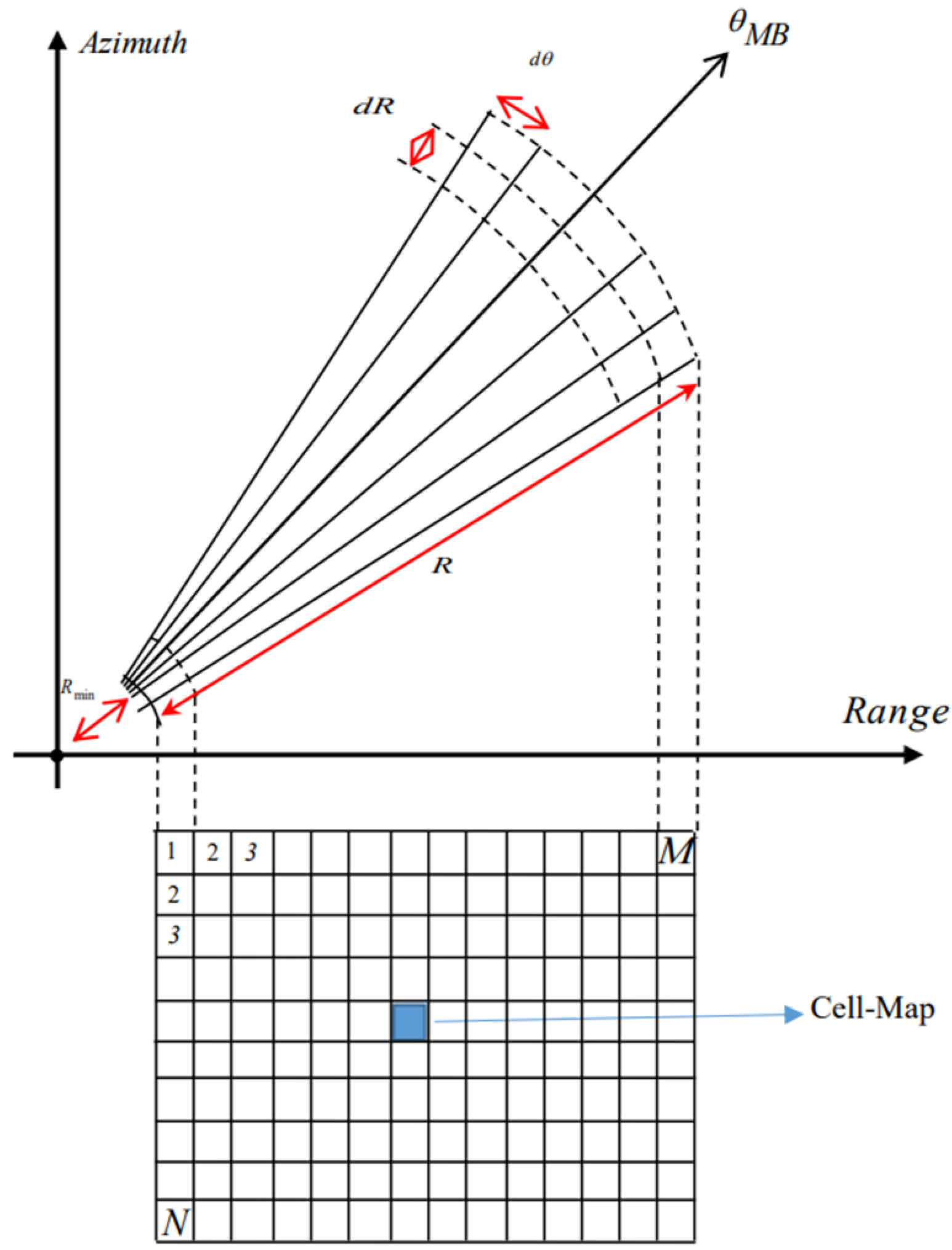
2.1.1. Description of the CMAP-CFAR Process
2.1.2. Probability of Detection
2.1.3. Probability of a False Alarm
2.1.4. Analysis of the CMAP-CFAR
2.2. Clutter Map Cfar Mixed with the Gabor Transform Algorithm
2.2.1. Analysis Tools and Investigation Techniques
2.2.2. Detection with the Gabor Transform
2.3. Clutter Models
2.3.1. Model 1: Targets Drowned in a Cluttered Weibull Distribution
2.3.2. Model 2: Targets Embedded in Rayleigh Distribution Clutter
2.3.3. Model 3: Targets Drowned in Usual Clutter Distribution
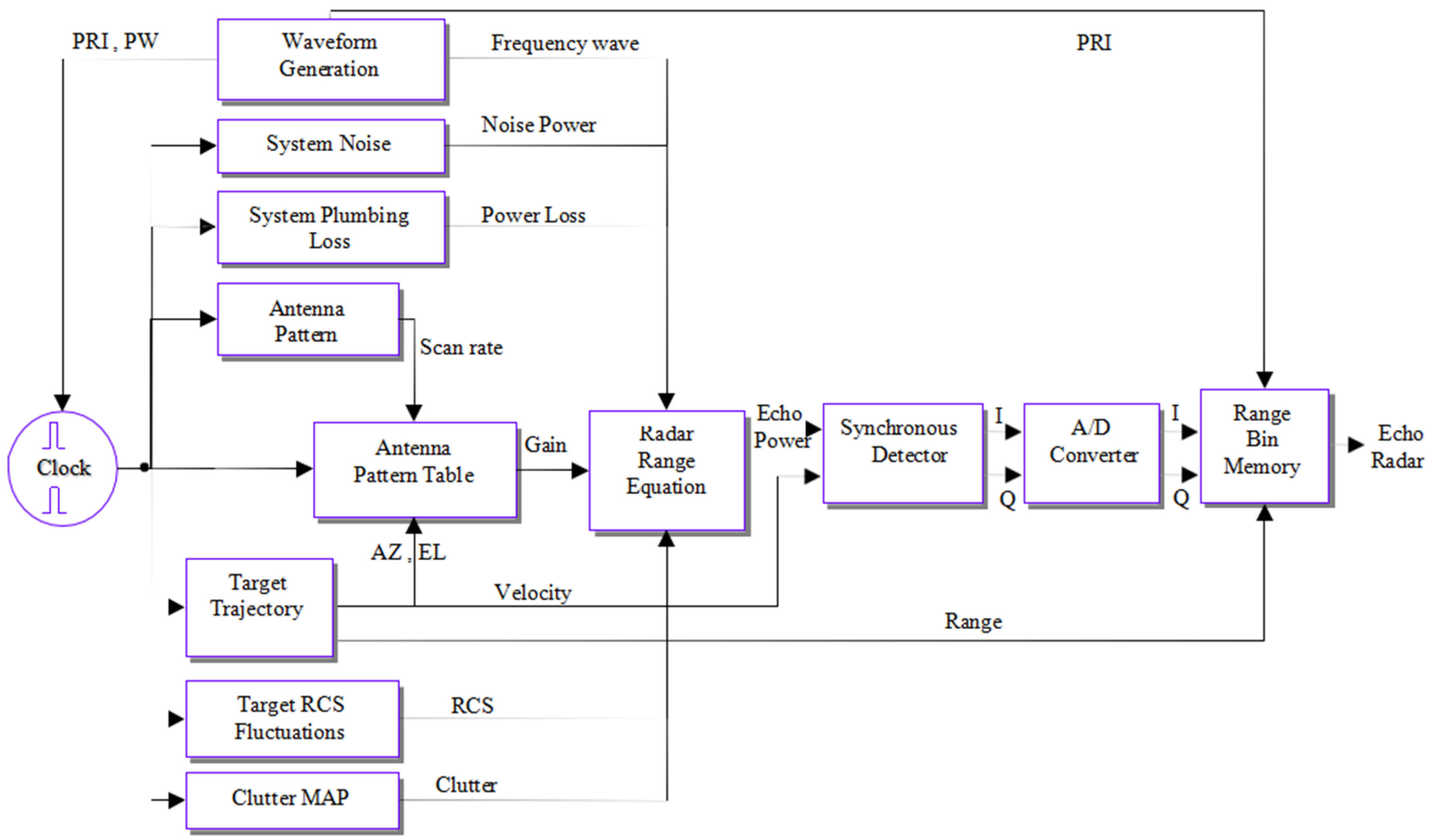
2.4. Radar Signal Simulation
3. Simulation Results and Interpretation
3.1. Scenario 1: The Effect of Distance
3.1.1. Simulation with Clutter Model 1
3.1.2. Simulation with Clutter Model 2
3.1.3. Simulation with Clutter Model 3
3.2. Scenario 2: Effect on the Number of Targets
3.2.1. Simulation with Clutter Model 1
3.2.2. Simulation with Clutter Model 2
3.2.3. Simulation with Clutter Model 3
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liang, S.; Chen, R.; Duan, G.; Du, J. Deep learning-based lightweight radar target detection method. J. Real-Time Image Process. 2023, 20, 1–10. [Google Scholar] [CrossRef]
- Chen, B.; Liu, L.; Zou, Z.; Shi, Z. Target Detection in Hyperspectral Remote Sensing Image: Current Status and Challenges. Remote Sens. 2023, 15, 3223. [Google Scholar] [CrossRef]
- Xu, B.Z.; Chen, Y.Q.; Gu, H.; Su, W.M. Research on a Novel Clutter Map Constant False Alarm Rate Detector Based on Power Transform. Radioengineering 2022, 31, 114–126. [Google Scholar] [CrossRef]
- Liu, K.; Li, Y.; Wang, P.; Peng, X.; Liao, H.; Li, W. A CFAR Detection Algorithm Based on Clutter Knowledge for Cognitive Radar. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2023, E106A, 590–599. [Google Scholar] [CrossRef]
- Finn, H.; Johnson, R.S. Adaptive detection mode with threshold control as a function of spatially sampled clutter level estimates. RCA Rev. 1968, 29, 414–464. [Google Scholar]
- Finn, H.M. A CFAR Design for a Window Spanning Two Clutter Fields. IEEE Trans. Aerosp. Electron. Syst. 1986, AES-22, 155–169. [Google Scholar] [CrossRef]
- Nitzberg, R. Clutter Map CFAR Analysis. IEEE Trans. Aerosp. Electron. Syst. 1986, AES-22, 419–421. [Google Scholar] [CrossRef]
- Bouchelaghem, H.; Hamadouche, M.; Soltani, F.; Baddari, K. Adaptive Clutter-Map CFAR detection in distributed sensor networks. AEU Int. J. Electron. Commun. 2016, 70, 1288–1294. [Google Scholar] [CrossRef]
- Hamadouche, M.; Barakat, M.; Khodja, M. Analysis of the clutter map CFAR in Weibull clutter. Signal Process. 2000, 80, 117–123. [Google Scholar] [CrossRef]
- Barkat, M.; Varshney, P. Adaptive cell-averaging CFAR detection in distributed sensor networks. IEEE Trans. Aerosp. Electron. Syst. 1991, 27, 424–429. [Google Scholar] [CrossRef]
- Meng, X. Performance analysis of Nitzberg’s clutter map for Weibull distribution. Digit. Signal Process. 2010, 20, 916–922. [Google Scholar] [CrossRef]
- Meng, X. Performance of clutter map with binary integration against Weibull background. AEU Int. J. Electron. Commun. 2013, 67, 611–615. [Google Scholar] [CrossRef]
- Sim, Y.; Heo, J.; Jung, Y.; Lee, S.; Jung, Y. FPGA Implementation of Efficient CFAR Algorithm for Radar Systems. Sensors 2023, 23, 954. [Google Scholar] [CrossRef]
- Cao, C.; Zhao, Y. The improved constant false alarm rate detector based on multi-frame integration for fluctuating target detection in heavy-tailed clutter. IET Signal Process. 2023, 17, e12145. [Google Scholar] [CrossRef]
- Wang, J.; Li, H.; Huo, G.; Li, C.; Wei, Y. A Multi-Beam Seafloor Constant False Alarm Detection Method Based on Weighted Element Averaging. J. Mar. Sci. Eng. 2023, 11, 513. [Google Scholar] [CrossRef]
- Yuan, J.T. QRD Least-Squares Lattice Algorithms. In QRD-RLS Adaptive Filtering; Springer: Boston, MA, USA, 2008. [Google Scholar] [CrossRef]
- Clouqueur, T.; Saluja, K.; Ramanathan, P. Fault tolerance in collaborative sensor networks for target detection. IEEE Trans. Comput. 2004, 53, 320–333. [Google Scholar] [CrossRef]
- Li, R.; Tao, L.; Kwan, H.K. Multiwindow discrete Gabor transform using parallel lattice structures. IET Signal Process. 2020, 14, 420–426. [Google Scholar] [CrossRef]
- Klinger, A. Book Review: Signal Analysis—Time, Frequency, Scale and Structure By Ronald L. Allen and Duncan W. Mills, IEEE Press (Wiley-Interscience), New York, 2003, ISBN 0-471-23441-9. Ann. Biomed. Eng. 2004, 32, 1317. [Google Scholar] [CrossRef]
- Smaoui, K.; Abid, K. Heisenberg uncertainty inequality for Gabor transform on nilpotent Lie groups. Anal. Math. 2021, 48, 147–171. [Google Scholar] [CrossRef]
- Lee, N.; Schwartz, S. Robustness of oversampled Gabor transient detectors: A comparison of energy and known location detectors. IEEE Trans. Signal Process. 1997, 45, 1638–1641. [Google Scholar] [CrossRef]
- Khan, Z.; Gulistan, M.; Kadry, S.; Chu, Y.-M.; Lane-Krebs, K. On Scale Parameter Monitoring of the Rayleigh Distributed Data Using a New Design. IEEE Access 2020, 8, 188390–188400. [Google Scholar] [CrossRef]
- Detouche, N.; Laroussi, T.; Madjidi, H. New log-t-based CFAR detectors for a non-homogeneous Weibull Background. Phys. Commun. 2023, 59, 102085. [Google Scholar] [CrossRef]
- Rohling, H. Radar CFAR Thresholding in Clutter and Multiple Target Situations. IEEE Trans. Aerosp. Electron. Syst. 1983, AES-19, 608–621. [Google Scholar] [CrossRef]
- Yang, B.; Zhang, H. A CFAR Algorithm Based on Monte Carlo Method for Millimeter-Wave Radar Road Traffic Target Detection. Remote Sens. 2022, 14, 1779. [Google Scholar] [CrossRef]
- Zhang, W.; Li, Y.; Zheng, Z.; Xu, L.; Wang, Z. Multi-Target CFAR Detection Method for HF Over-The-Horizon Radar Based on Target Sparse Constraint in Weibull Clutter Background. Remote Sens. 2023, 15, 2488. [Google Scholar] [CrossRef]
- Feintuch, S.; Permuter, H.; Bilik, I.; Tabrikian, J. Neural Network-Based Multi-Target Detection within Correlated Heavy-Tailed Clutter. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 1–15. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
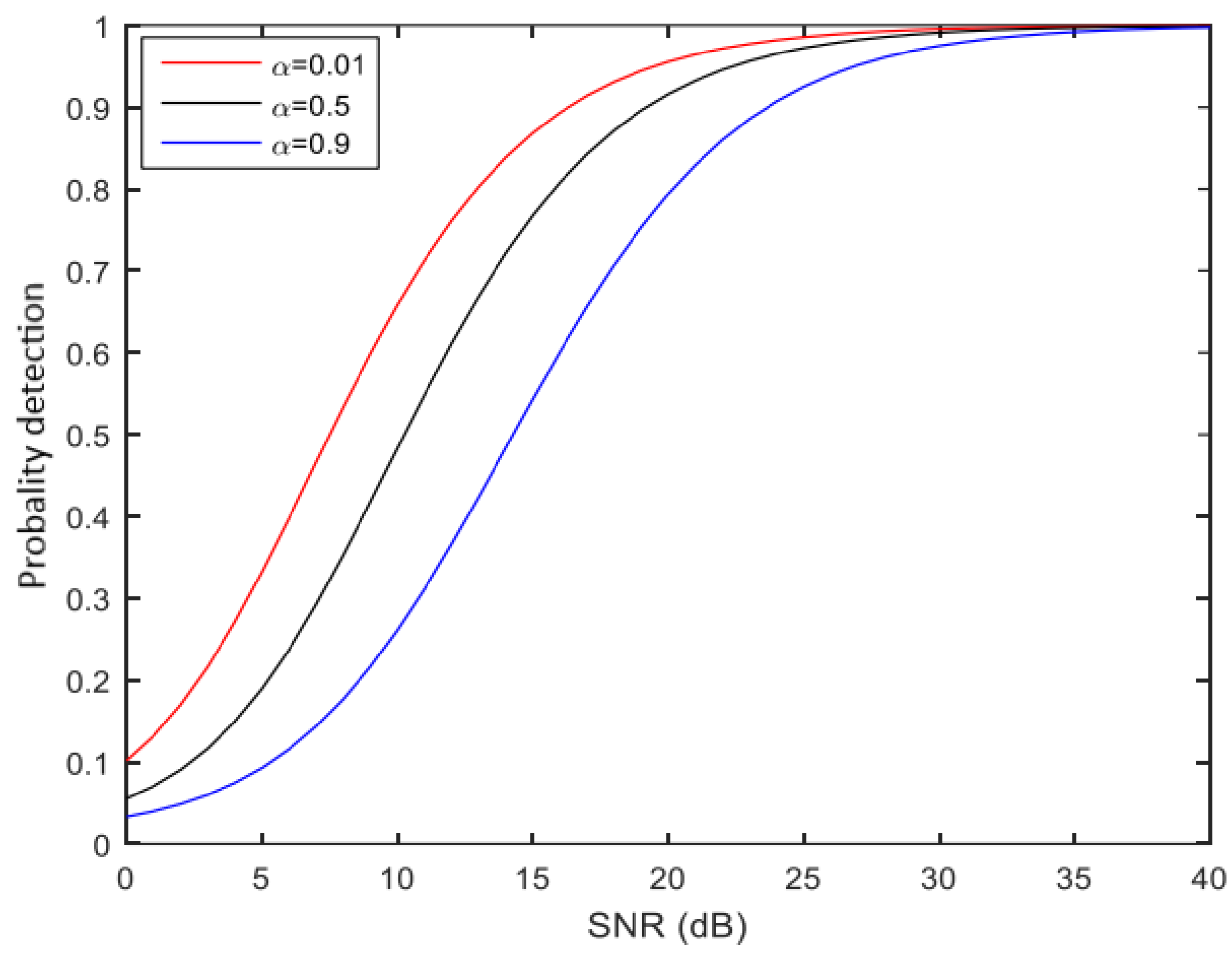
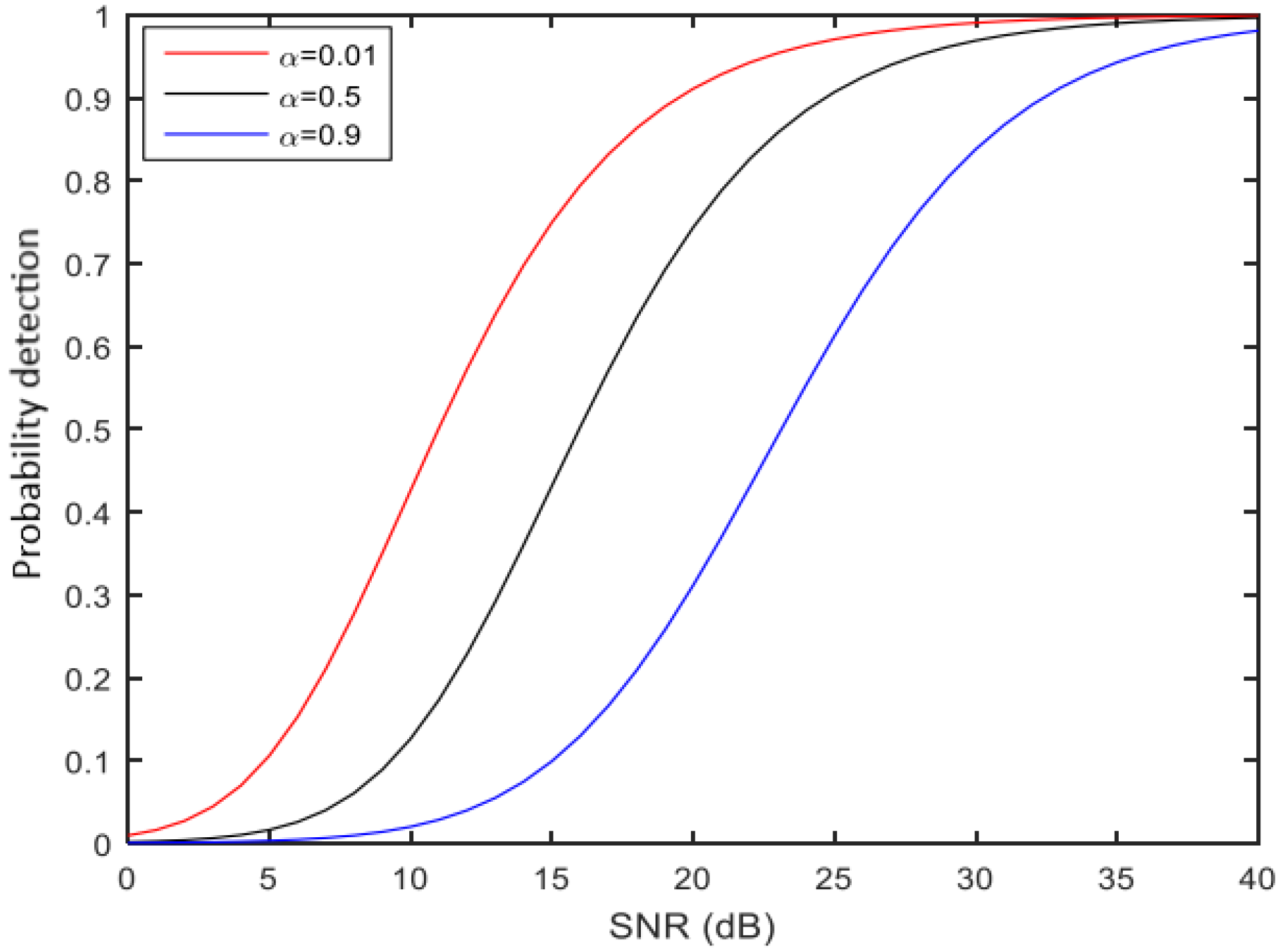
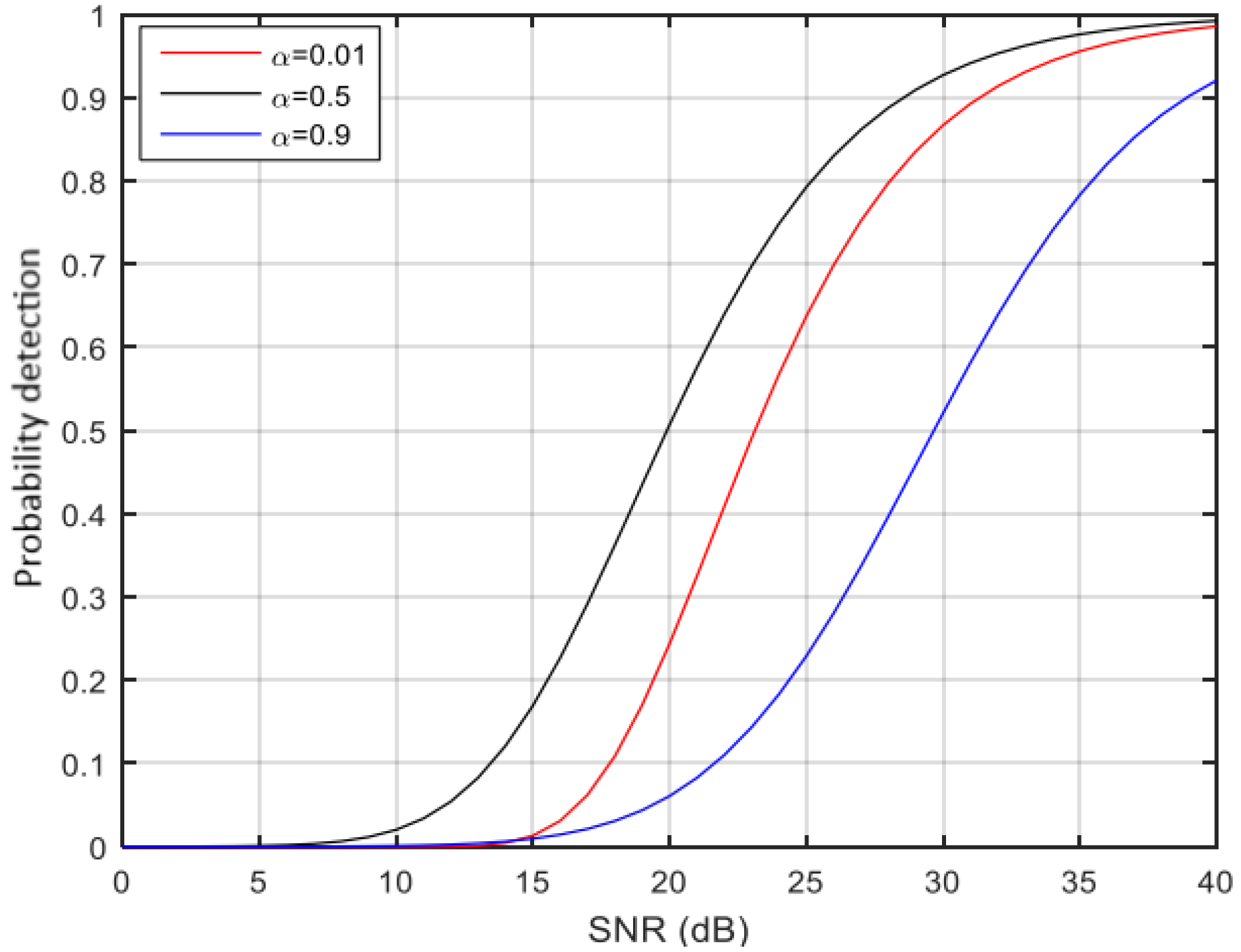
| α | Pfa | Th |
|---|---|---|
| 0.01 | 10−2 | 4.6 |
| 10−4 | 9.4 | |
| 10−6 | 143 | |
| 0.5 | 10−2 | 9 |
| 10−4 | 31.4 | |
| 10−6 | 76.6 | |
| 0.9 | 10−2 | 25.6 |
| 10−4 | 190 | |
| 10−6 | 854 |
| Radar Parameters | Symbols | Values |
|---|---|---|
| RF frequency | f | 900 MHz |
| IF frequency | If | 30 MHz |
| Pulse repetition frequency | PRF | 1 kHz |
| Peak transmit power | Pt | 280 kWatts |
| Pulse width | τ | 6 μs |
| Main beam gain | Gt | 28.5 dB |
| −3 dB HPBW | HPBW | 3.3° |
| Up spot angle elevation | El_up | 12° |
| Scan rate | Fs | 72°/s |
| Scan sector (min to max) | Scan_sec | 25° |
| Receiver bandwidth | Bn | 1 MHz |
| Doppler filter bank | Nf | 32 |
| Figure noise | Fn | 2.5 |
| IF amplitude gain | Aif | 10 dB |
| Total radar loss | Loss | 20 dB |
| Parameters | Symbols | Target 1 | Target 2 |
|---|---|---|---|
| Distance | R | 88 km | 80.5 km |
| Azimuth angle | θAZ | 10° | 10° |
| Speed | ʋ | 333.3 m/s | 333.3 m/s |
| Altitude | Alt | 2200 m | 2200 m |
| Hidden corner | ƞ | 200° | 200° |
| Radar cross-section | SER | 1 m2 | 1 m2 |
| Parameters | Values |
|---|---|
| Nos | 24 |
| k | 24 |
| NG | 2 |
| Parameters | Values |
|---|---|
| h(t) | Gaussian |
| Nh | 32 |
| M | 64 |
| N | 8 |
| q | 1 |
| Clutter Model | Clutter Parameters | Target Detected by OS-CFAR Alone | The Target Detected by the Proposed Detector | The Exact Position of the Targets | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| a | b | σ | μ | Range (km) | Number of False Alarms | Target 1 | Target 2 | Number of False Alarms | Target Range1 | Target Range2 | |
| Clutter-free | 84 | 0 | M = 36 | M = 43 | 0 | R = 80 km and M = 36 | R = 80.5 km and M = 43 | ||||
| Weibull distribution | 25 | 0.9 | 84 | 2 | M = 36 | M = 43 | 0 | ||||
| 200 | 0.9 | 84 | 7 | M = 38 | M = 43 | 0 | |||||
| 200 | 0.3 | 100 | 7 | M = 38 | M = 39 | 0 | |||||
| Rayleigh distribution | 100 | 84 | 0 | M = 36 | M = 43 | 0 | R = 80 km and M = 36 | R = 80.5 km and M = 43 | |||
| 200 | 84 | 5 | M = 36 | M = 43 | 0 | ||||||
| 300 | 84 | 5 | M = 36 | M = 43 | 0 | ||||||
| 600 | 84 | 5 | M = 40 | M = 44 | ? | ||||||
| 600 | 84 | 0 | M = 36 | M = 45 | 0 | ||||||
| 600 | 84 | 7 | M = 39 | M = 43 | 0 | R = 80 km and M = 36 | R = 80.5 km and M = 43 | ||||
| Normal distribution | 1000 | 1 | ? | ? | M = 33 | M = 40 | ? | ||||
| Scenario of Targets | Symbols | Target 1 | Target 2 | Target 3 |
|---|---|---|---|---|
| Distance | R | 80 km | 80.4 km | 80 km |
| Azimuth angle | θAZ | 10° | 10° | 16° |
| Speed | v | 333.33 m/s | 333.33 m/s | 333.33 m/s |
| Altitude | h | 2200 m | 2200 m | 2200 m |
| Hidden corner | η | 200° | 200° | 200° |
| Radar cross-section | RCS | 1 m2 | 1 m2 | 1 m2 |
| Clutter Model | Clutter Parameters | Target Detected by the OS-CFAR Detector Alone | The Target Detected by the Proposed Detector | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| a | b | σ | μ | Range (km) | Nfa | Nos | Target1 | Target2 | Target3 | Nfa | M | N | q | |
| Without clutter | 82 | 1 | M = 39 | M = 46 | M = 54 | 0 | 64 | 8 | 1 | |||||
| Weibull distribution | 25 | 0.9 | 81 | 9 | M = 41 | M = 51 | M = 61 | 0 | 64 | 8 | 1 | |||
| 250 | 0.9 | 84 | 9 | M = 43 | M = 52 | M = 62 | 0 | 64 | 8 | 1 | ||||
| 250 | 0.9 | ? | ? | ? | ? | M = 45 | ? | 64 | 32 | 1 | ||||
| 25 | 0.9 | ? | ? | ? | M = 23 | M = 28 | 2 | 32 | 16 | 2 | ||||
| Rayleigh distribution | 200 | 83 | 12 | 10 | ? | M = 48 | M = 58 | 1 | 64 | 16 | 1 | |||
| 200 | 83 | 11 | 10 | M = 81 | M = 102 | M = 120 | 0 | 128 | 8 | 1 | ||||
| 250 | 81 | 12 | 10 | M = 81 | M = 102 | M = 120 | 1 | 128 | 8 | 1 | ||||
| Normal distribution | 400 | 10 | ? | ? | 10 | ? | ? | ? | ? | 128 | 8 | 1 | ||
| 400 | 10 | ? | ? | 10 | ? | ? | ? | ? | 256 | 2 | 1 | |||
| No. | Titles | Methods | Advantages | Limits | References |
|---|---|---|---|---|---|
| 1 | Clutter Map Constant False Alarm Rate Mixed with the Gabor Transform for Target Detection via Monte Carlo Simulation | detection method that uses time-frequency analysis tools via clutter map constant false alarm rate mixed with the Gabor transform for target detection. | • Reduce the impact of clutter and maintains a low rate of false alarms. • Significantly improves the detection probability and reduces the false alarm rate. • Facilitates the extraction of pertinent target characteristics and improves differentiation from clutter. | • Low efficiency when the number of targets is increase and when parameters linked to each clutter model are significantly increased or reduced. | Actual work |
| 2 | Multitarget CFAR Detection Method for HF Over-The-Horizon Radar Based on Target Sparse Constraint in Weibull Clutter Background | Ordered statistics constant false alarm detector (OS-CFAR): background distribution parameter estimation and the basic theory of target/jamming target identification using sparse characteristics. | • Can effectively resist interference from multiple targets and maintain good detection performance. • Can identify strong targets well, and the weak targets in the strong target shelter area can also be recognized. | • In multitarget scenarios, our method still has limitations in clutter-edge scenes. • The performance of the detector decreases with the number of targets. | [26] |
| 3 | FPGA Implementation of Efficient CFAR Algorithm for Radar Systems | New decision criterion and applies the optimal CFAR algorithms such as the modified variable index (MVI) and automatic censored cell-averaging-based ordered data variability (ACCA-ODV). | • Can provide superior performance for both homogeneous and nonhomogeneous environments. • The hardware complexity is very low and the operation speed is very high. | • Not applicable to various environments. | [13] |
| 4 | Neural-Network-Based Multitarget Detection within Correlated Heavy-Tailed Clutter | A unified NN model to process the time-domain radar signal for a variety of signal-to-clutter-plus-noise ratios (SCNRs) and clutter distributions. | • Robustness in the case of increases in the number of targets. • Good performance advantage for various clutter “spikiness” conditions in terms of probability of detection and detection threshold sensitivity. | • Less efficiency in highly cluttered environments. | [27] |
| 5 | The Improved Constant False Alarm Rate Detector Based on Multiframe Integration for Fluctuating Target Detection in Heavy-Tailed Clutter | Multiframe integration in heavy-tailed clutter for the radar with high resolution and even smaller grazing angle. | • Works well with the presence of target-like outliers in the heavy-tailed clutter. • Capable of alleviating the masking-effect resorting to the additive feedback operation when a target is large enough to cross several cells in a multitarget case. | • High implementation complexity and non applicability in diverse scenarios. | [14] |
| 6 | A Multibeam Seafloor Constant False Alarm Detection Method Based on Weighted Element Averaging | Weighted element averaged constant false alarm detection method (WCA-CFAR). | • Can effectively reduce the missing detection probability and improve the detection probability. • Could remove the false alarm targets in the horizontal and vertical directions, achieving a good detection performance. | • Constant false alarm detection problem under different noise distribution conditions. | [15] |
| 7 | Deep-Learning-Based Lightweight Radar Target Detection Method | A lightweight target detection method based on improved YOLOv4-tiny (applies depthwise separable convolution (DSC) and bottleneck architecture (BA) to the YOLOv4-tiny network). | • Can quickly and accurately detect radar targets against complicated backgrounds. • Good results in terms of detection accuracy. | • Has a larger model and a slower detection speed. | [1] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mbouombouo Mboungam, A.H.; Zhi, Y.; Fonzeu Monguen, C.K. Clutter Map Constant False Alarm Rate Mixed with the Gabor Transform for Target Detection via Monte Carlo Simulation. Appl. Sci. 2024, 14, 2967. https://doi.org/10.3390/app14072967
Mbouombouo Mboungam AH, Zhi Y, Fonzeu Monguen CK. Clutter Map Constant False Alarm Rate Mixed with the Gabor Transform for Target Detection via Monte Carlo Simulation. Applied Sciences. 2024; 14(7):2967. https://doi.org/10.3390/app14072967
Chicago/Turabian StyleMbouombouo Mboungam, Abdel Hamid, Yongfeng Zhi, and Cedric Karel Fonzeu Monguen. 2024. "Clutter Map Constant False Alarm Rate Mixed with the Gabor Transform for Target Detection via Monte Carlo Simulation" Applied Sciences 14, no. 7: 2967. https://doi.org/10.3390/app14072967
APA StyleMbouombouo Mboungam, A. H., Zhi, Y., & Fonzeu Monguen, C. K. (2024). Clutter Map Constant False Alarm Rate Mixed with the Gabor Transform for Target Detection via Monte Carlo Simulation. Applied Sciences, 14(7), 2967. https://doi.org/10.3390/app14072967