

GPS-Induced Disparity Correction for Accurate Object Placement in Augmented Reality
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
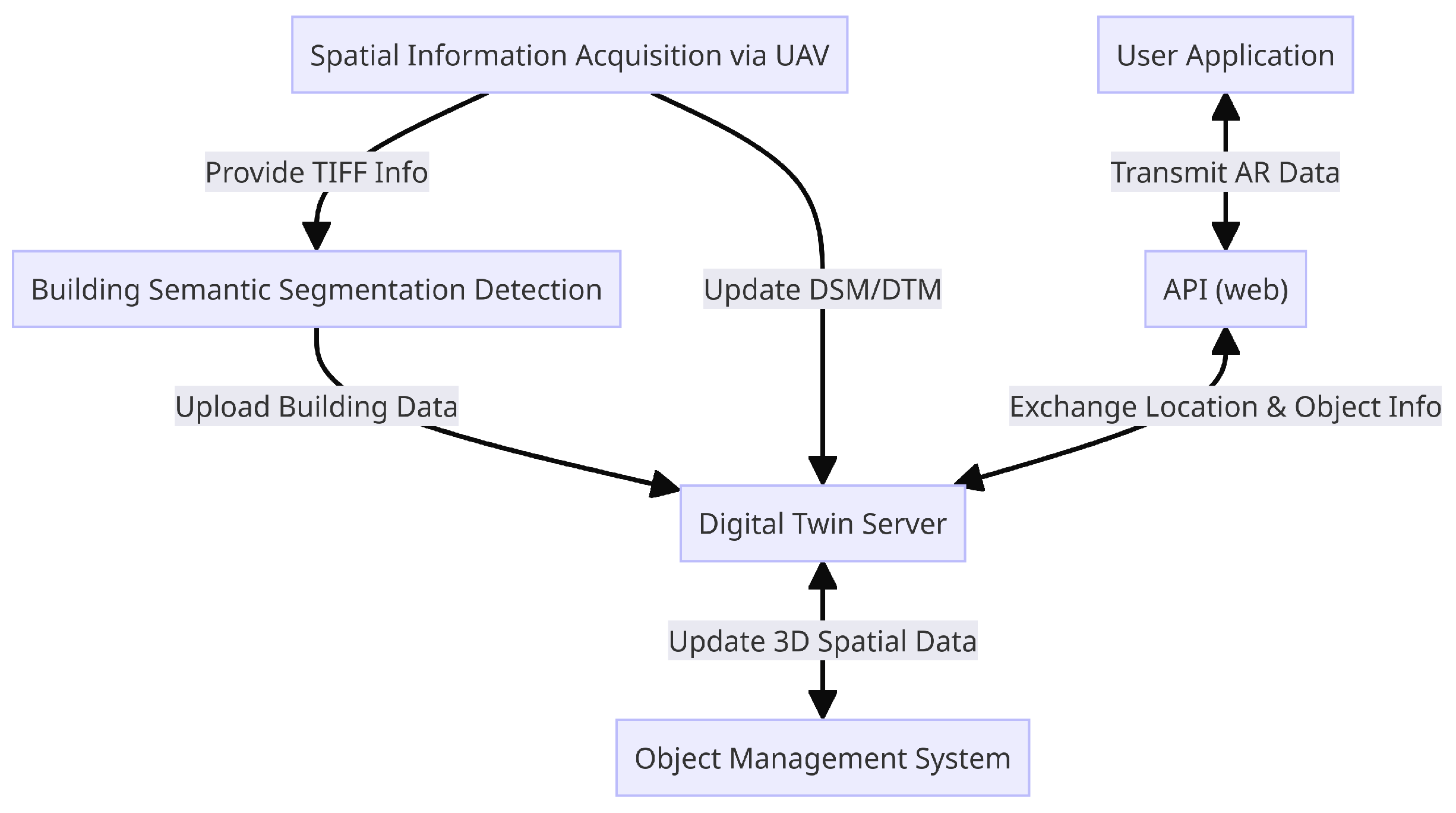
2.1. Framework for Object Rendering in Augmented Reality
2.2. Coordinate Mapping for 3D Object Rendering in AR
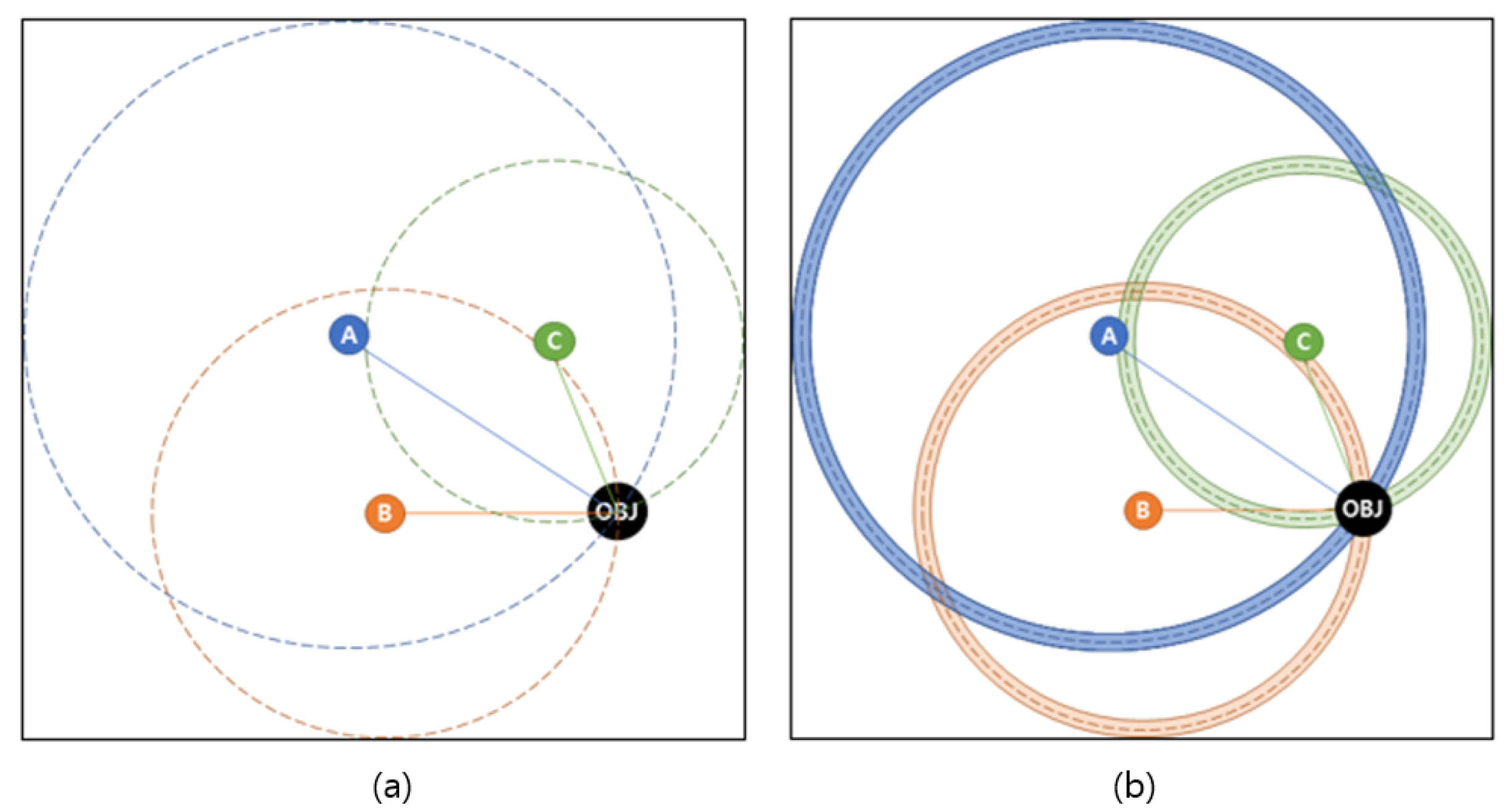
2.3. Localization of 3D Objects
3. Results
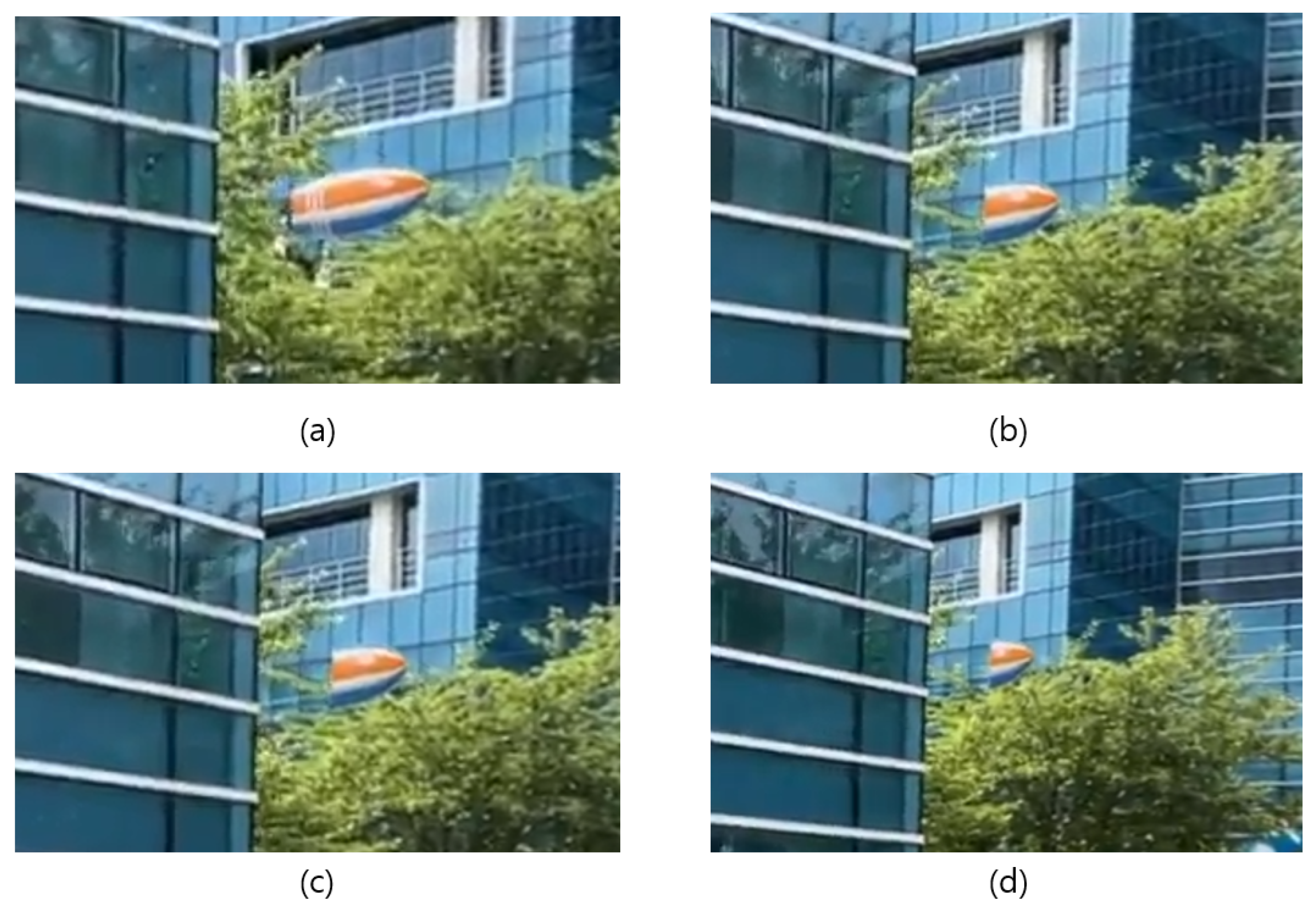
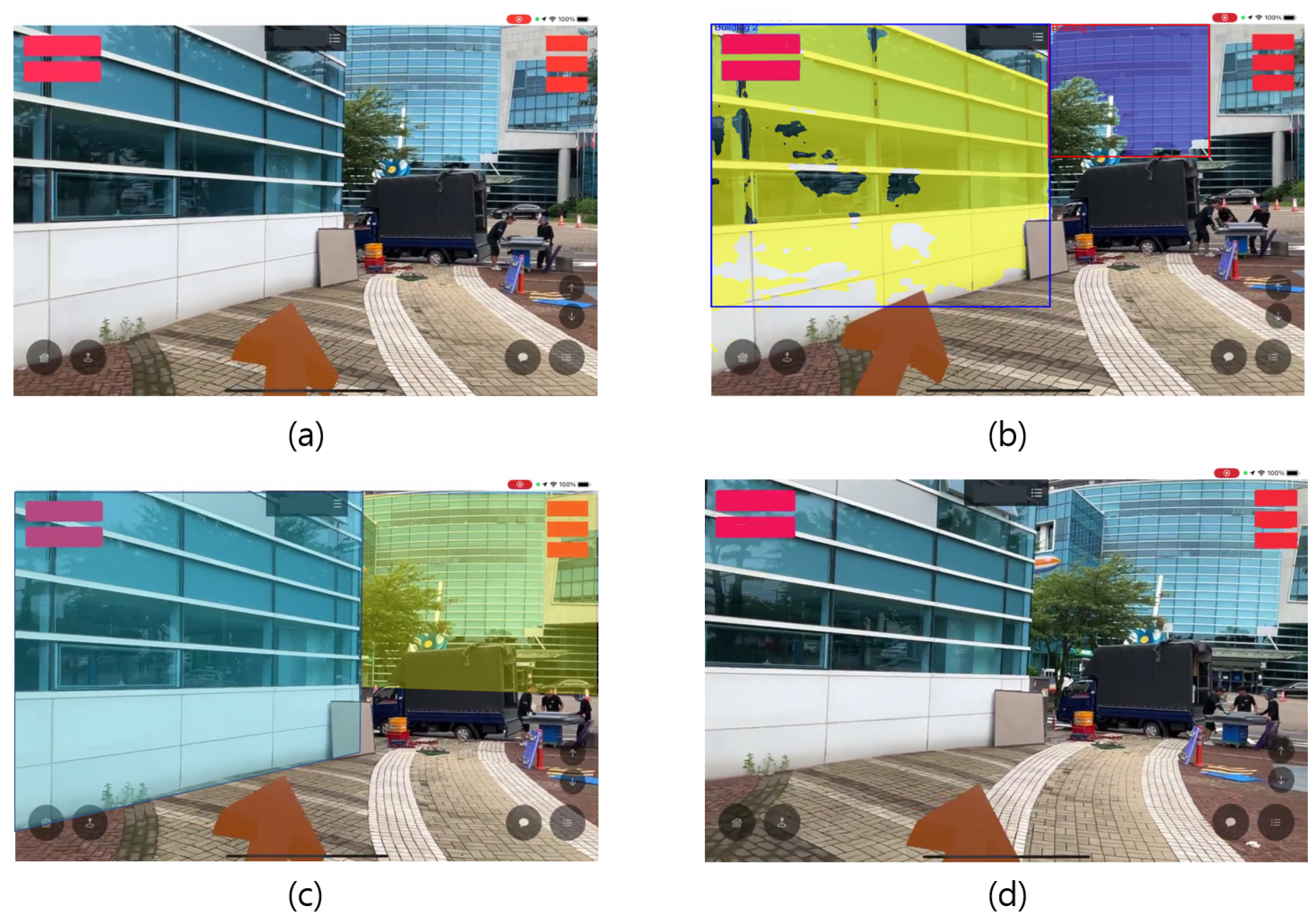
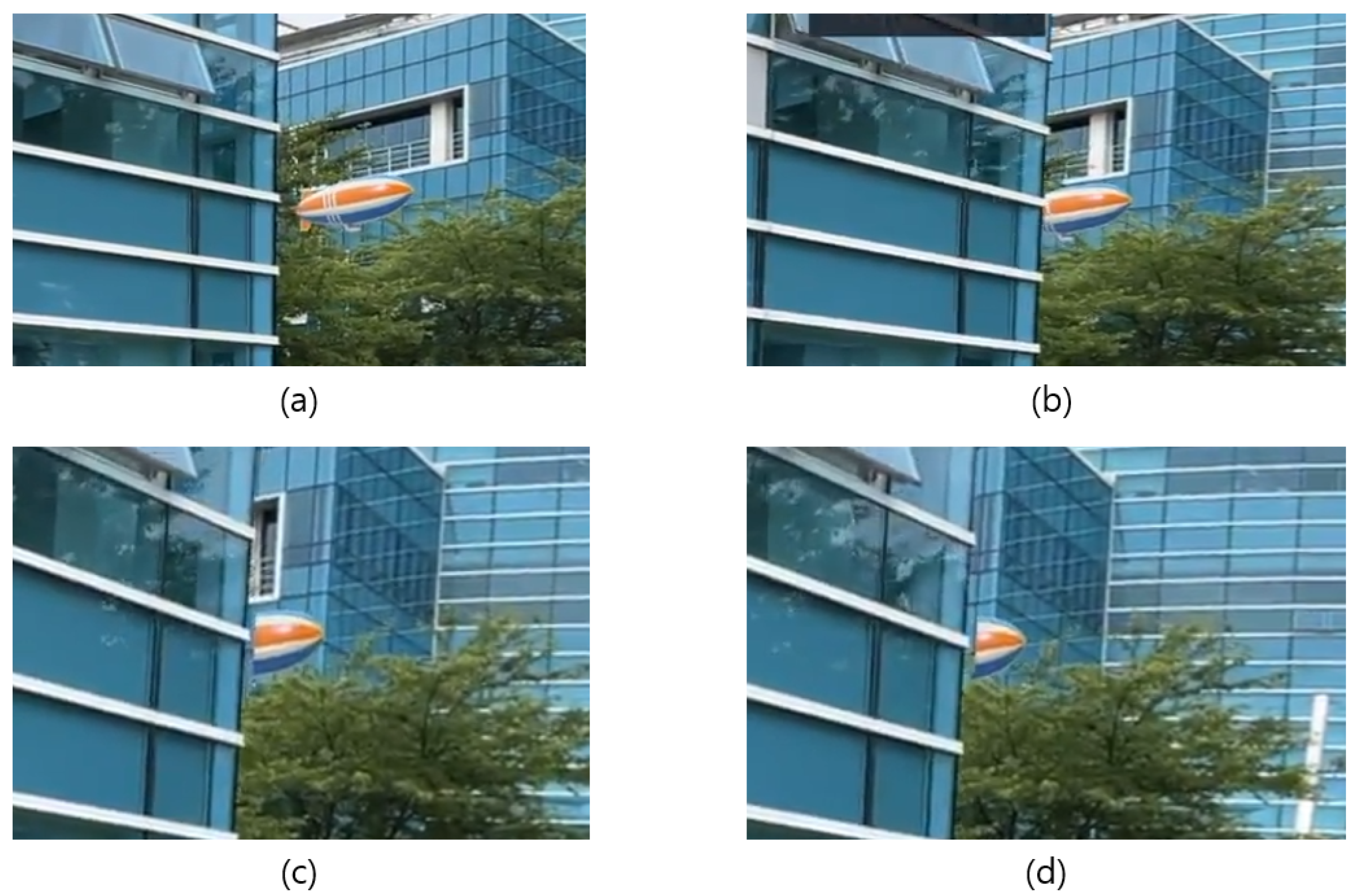
3.1. Results of 3D Object AR Rendering App Implementation and Location Correction
3.2. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Böhm, F.; Dietz, M.; Preindl, T.; Pernul, G. Augmented reality and the digital twin: State-of-the-art and perspectives for cybersecurity. JCP 2021, 1, 519–538. [Google Scholar] [CrossRef]
- Lee, K. Augmented reality in education and training. TechTrends 2012, 56, 13–21. [Google Scholar] [CrossRef]
- Lee, J.H.; Yanusik, I.; Choi, Y.; Kang, B.; Hwang, C.; Park, J.; Nam, D.; Hong, S. Automotive augmented reality 3D head-up display based on light-field rendering with eye-tracking. Opt. Express 2020, 28, 29788–29804. [Google Scholar] [CrossRef] [PubMed]
- Boboc, R.G.; Gîrbacia, F.; Butilă, E.V. The application of augmented reality in the automotive industry: A systematic literature review. Appl. Sci. 2020, 10, 4259. [Google Scholar] [CrossRef]
- Guo, Y.; Bennamoun, M.; Sohel, F.; Lu, M.; Wan, J. 3D object recognition in cluttered scenes with local surface features: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 2270–2287. [Google Scholar] [CrossRef] [PubMed]
- Rejeb, A.; Rejeb, K.; Treiblmaier, H. How augmented reality impacts retail marketing: A state-of-the-art review from a consumer perspective. J. Strateg. Mark. 2023, 31, 718–748. [Google Scholar] [CrossRef]
- Choe, J.; Seo, S.A. A 3D real object recognition and localization on SLAM based augmented reality environment. In Proceedings of the 2020 International Conference on Computational Science and Computational Intelligence (CSci), Las Vegas, NV, USA, 16–18 December 2020; pp. 745–746. [Google Scholar] [CrossRef]
- Rao, J.; Qiao, Y.; Ren, F.; Wang, J.; Du, Q. A mobile outdoor augmented reality method combining deep learning object detection and spatial relationships for geovisualization. Sensors 2017, 17, 1951. [Google Scholar] [CrossRef] [PubMed]
- Yuan, C.; Pose, M. Tracking for augmented reality. In Advances in Visual Computing; Bebis, G., Boyle, R., Parvin, B., Koracin, D., Remagnino, P., Nefian, A., Meenakshisundaram, G., Pascucci, V., Zara, J., Molineros, J., et al., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 4291, pp. 721–730. ISBN 978-3-540-48628-2. [Google Scholar]
- Liao, H.; Inomata, T.; Sakuma, I.; Dohi, T. 3-D augmented reality for MRI-guided surgery using integral videography autostereoscopic image overlay. IEEE Trans. Biomed. Eng. 2010, 57, 1476–1486. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Wang, C.; Kang, X.; Zhao, Q. Camera localization for augmented reality and indoor positioning: A vision-based 3D feature database approach. Int. J. Digit. Earth 2020, 13, 727–741. [Google Scholar] [CrossRef]
- Gao, Z.; Hwang, A.; Zhai, G.; Peli, E. Correcting geometric distortions in stereoscopic 3D imaging. PLoS ONE 2018, 13, e0205032. [Google Scholar] [CrossRef] [PubMed]
- Emmaneel, R.; Oswald, M.R.; De Haan, S.; Datcu, D. Cross-view outdoor localization in augmented reality by fusing map and satellite data. Appl. Sci. 2023, 13, 11215. [Google Scholar] [CrossRef]
- Mithun, N.C.; Minhas, K.S.; Chiu, H.-P.; Oskiper, T.; Sizintsev, M.; Samarasekera, S.; Kumar, R. Cross-view visual geo-localization for outdoor augmented reality. In Proceedings of the 2023 IEEE Conference Virtual Reality and 3D User Interfaces (VR), Shanghai, China, 25–29 March 2023; pp. 493–502. [Google Scholar] [CrossRef]
- Kumar, D.; Chiang, C.-H.; Lin, Y.-C. Experimental vibration analysis of large structures using 3D DIC technique with a novel calibration method. J. Civil Struct. Health Monit. 2022, 12, 391–409. [Google Scholar] [CrossRef]
- Baker, L.; Ventura, J.; Langlotz, T.; Gul, S.; Mills, S.; Zollmann, S. Localization and tracking of stationary users for augmented reality. Vis. Comput. 2023, 40, 227–244. [Google Scholar] [CrossRef]
- Xu, M.; Wang, Y.; Xu, B.; Zhang, J.; Ren, J.; Huang, Z.; Poslad, S.; Xu, P. A critical analysis of image-based camera pose estimation techniques. Neurocomputing 2024, 570, 127125. [Google Scholar] [CrossRef]
- Thomas, J.; Rosenberg, E.S. Reactive Alignment of Virtual and Physical Environments Using Redirected Walking. In Proceedings of the 2020 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), Atlanta, GA, USA, 22–26 March 2020. [Google Scholar] [CrossRef]
- Wu, Y.; Tang, F.; Li, H.; Camera, I.-B. Image-based camera Localization: An overview. Vis. Comput. Ind. Biomed. Art 2018, 1, 8. [Google Scholar] [CrossRef] [PubMed]
- Du, Z.; Liu, J.; Wang, T. Augmented reality marketing: A systematic literature review and an agenda for future inquiry. Front. Psychol. 2022, 13, 925963. [Google Scholar] [CrossRef] [PubMed]
- Coviello, R.G. Location-Based Augmented Reality Visualization of 3D Models Using a Mobile Application—izanagiXR. Master’s Thesis, ZHAW School of Management and Law, Winterthur, Switzerland, 2022. [Google Scholar]
- Kim, S.Y.; Kim, Y.S. A novel method using 3D interest points to place markers on a large object in augmented reality. Appl. Sci. 2024, 14, 941. [Google Scholar] [CrossRef]
- Jiang, J.R.; Subakti, H. An indoor location-based augmented reality framework. Sensors 2023, 23, 1370. [Google Scholar] [CrossRef] [PubMed]
- Singh, S.; Singh, J.; Shah, B.; Sehra, S.S.; Ali, F. Augmented reality and GPS-based resource efficient navigation system for outdoor environments: Integrating device camera, sensors, and storage. Sustainability 2022, 14, 12720. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Youm, S.; Jung, N.; Go, S. GPS-Induced Disparity Correction for Accurate Object Placement in Augmented Reality. Appl. Sci. 2024, 14, 2849. https://doi.org/10.3390/app14072849
Youm S, Jung N, Go S. GPS-Induced Disparity Correction for Accurate Object Placement in Augmented Reality. Applied Sciences. 2024; 14(7):2849. https://doi.org/10.3390/app14072849
Chicago/Turabian StyleYoum, Sungkwan, Nyum Jung, and Sunghyun Go. 2024. "GPS-Induced Disparity Correction for Accurate Object Placement in Augmented Reality" Applied Sciences 14, no. 7: 2849. https://doi.org/10.3390/app14072849
APA StyleYoum, S., Jung, N., & Go, S. (2024). GPS-Induced Disparity Correction for Accurate Object Placement in Augmented Reality. Applied Sciences, 14(7), 2849. https://doi.org/10.3390/app14072849