
Least-Squares Estimation of Tangent Space for a Triangular Mesh


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Background
2.1. Linear Methods for Tangent Space Computation
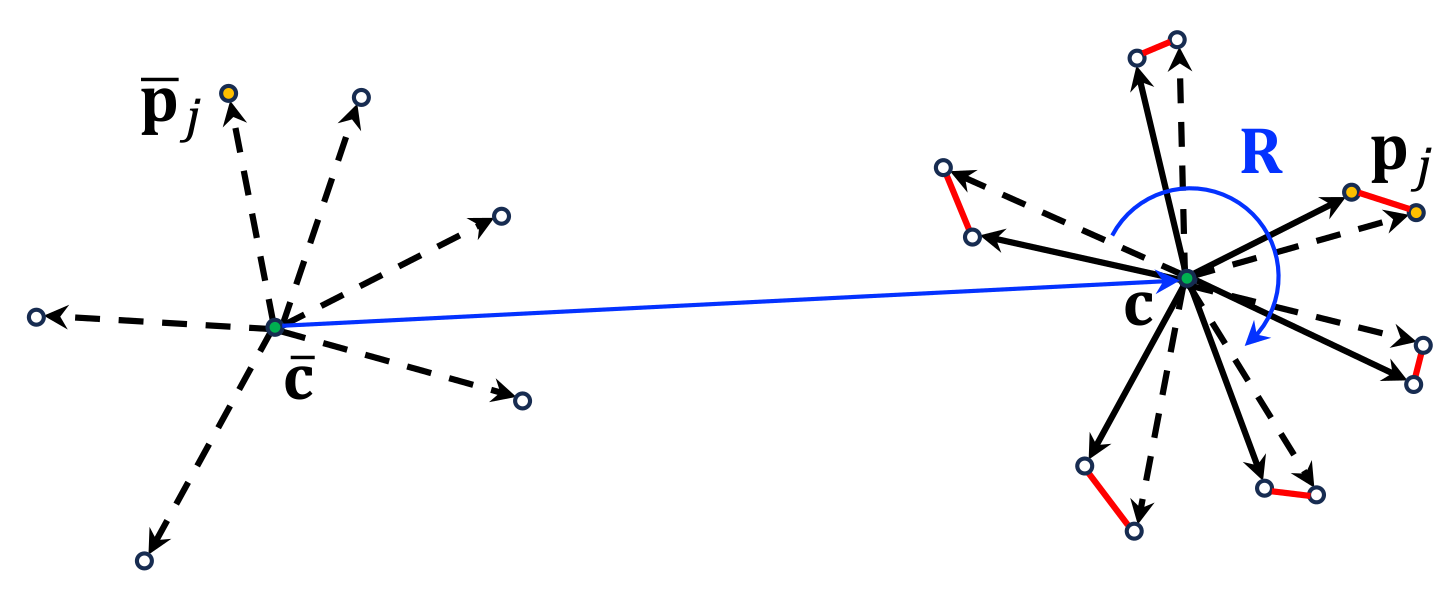
2.2. Least-Squares Estimation of Rigid Transformation
3. Method
3.1. Problem
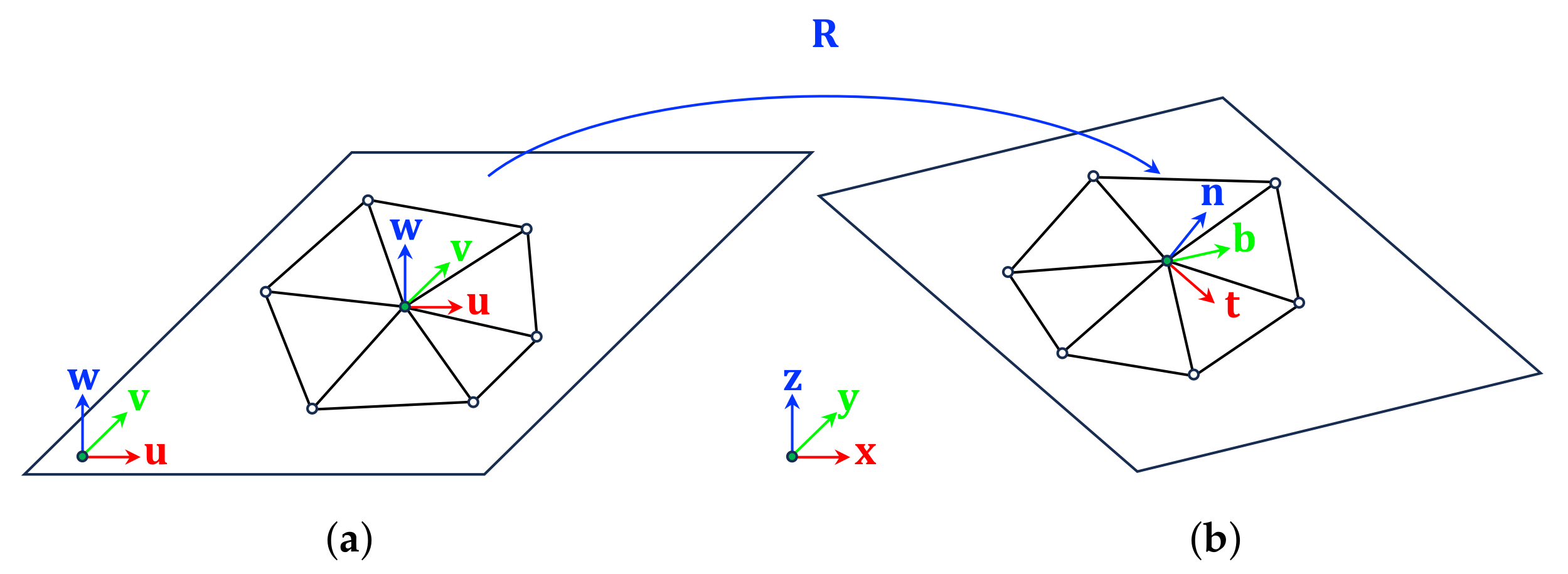
3.2. Solution Method for Unconstrained Normal Vectors
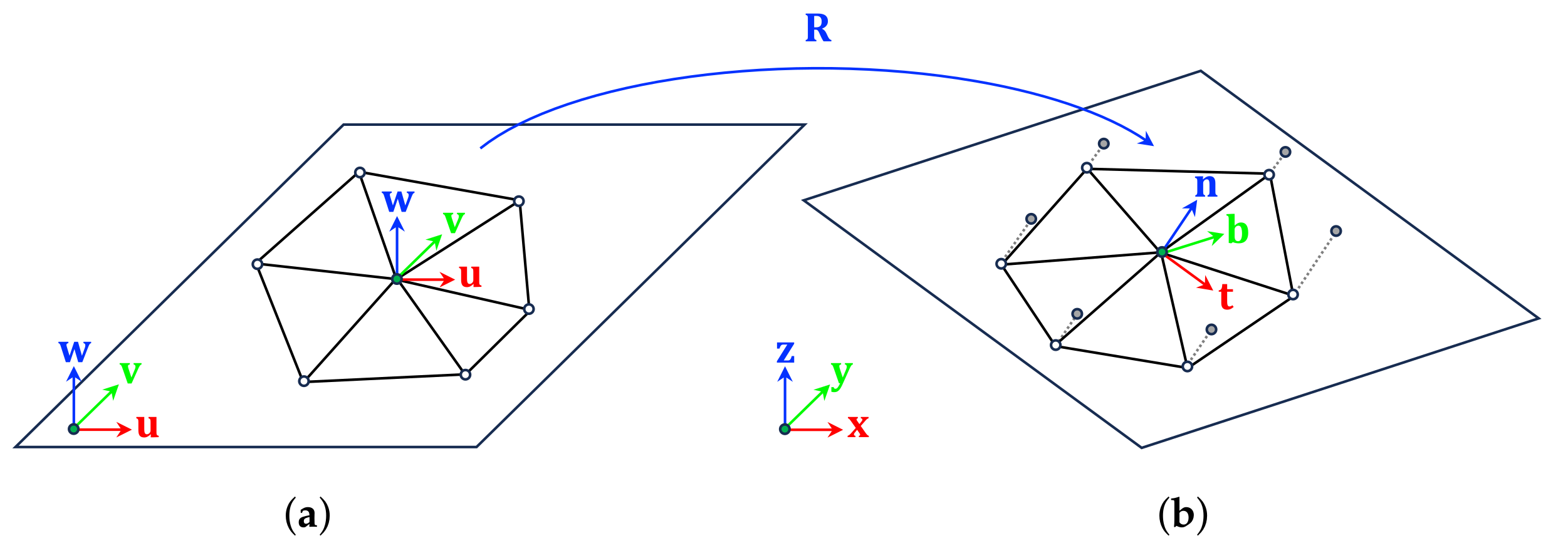
3.3. Solution Method for Constrained Normal Vectors
3.4. Texture Space Alignment for Seams
3.5. Incorporation of Texture Space Alignment
3.6. Application of Texture Space Alignment
4. Experimental Results
5. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kilgard, M.J. A Practical and Robust Bump-mapping Technique for Today’s GPUs. In Proceedings of the Game Developers Conference Course: Advanced OpenGL Game Development, New Orleans, LA, USA, 23–28 July 2000. [Google Scholar]
- Lengyel, E. Foundations of Game Engine Development, Volume 2: Rendering; Terathon Software LLC: Lincoln, CA, USA, 2019. [Google Scholar]
- Mikkelsen, M. Simulation of Wrinkled Surfaces Revisited. Master’s Thesis, Department of Computer Science at the University of Copenhagen, Copenhagen, Denmark, 2008. [Google Scholar]
- De Vries, J. Learn OpenGL: Learn Modern OpenGL Graphics Programming in a Step-by-Step Fashion; Kendall & Welling: Kendall, FL, USA, 2020. [Google Scholar]
- Lengyel, E. Computing Tangent Space Basis Vectors for an Arbitrary Mesh; Technical Report; Terathon Software 3D Graphics Library: Lincoln, CA, USA, 2001; Available online: http://www.terathon.com/code/tangent.html (accessed on 20 March 2024).
- Lengyel, E. Mathematics for 3D Game Programming and Computer Graphics; Cengage Learning: Boston, MA, USA, 2011. [Google Scholar]
- Mittring, M. Shader X4 Advanced Rendering Techniques; Chapter Triangle Mesh Tangent Space Calculation; Charles River Media: Hingham, MA, USA, 2005. [Google Scholar]
- Huang, T.S.; Blostein, S.D.; Margerum, E.A. Least-squares estimation of motion parameters from 3-D point correspondences. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Miami Beach, FL, USA, 22–26 June 1986; pp. 24–26. [Google Scholar]
- Arun, K.S.; Huang, T.S.; Blostein, S.D. Least-squares fitting of two 3-D point sets. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 9, 698–700. [Google Scholar] [CrossRef] [PubMed]
- Horn, B.K.P. Closed-form solution of absolute orientation using orthonormal matrices. J. Opt. Soc. Am. 1987, 5, 1127–1135. [Google Scholar] [CrossRef]
- Umeyama, S. Least-squares estimation of transformation parameters between two point patterns. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 376–380. [Google Scholar] [CrossRef]
- Horn, B.K.P. Closed-form solution of absolute orientation using unit quaternions. J. Opt. Soc. Am. 1987, 4, 629–642. [Google Scholar] [CrossRef]
- Müller, M.; Heidelberger, B.; Teschner, M.; Gross, M. Meshless Deformations Based on Shape Matching. ACM Trans. Graph. 2005, 24, 471–478. [Google Scholar] [CrossRef]
- Müller, M.; Chentanez, N. Solid Simulation with Oriented Particles. ACM Trans. Graph. 2011, 30, 92. [Google Scholar] [CrossRef]
- Sorkine, O.; Alexa, M. As-rigid-as-possible surface modeling. In Proceedings of the Eurographics Symposium on Geometry Processing, Barcelona, Spain, 4–6 July 2007; pp. 109–116. [Google Scholar]
- Choi, M.G.; Lee, J. As-Rigid-As-Possible Solid Simulation with Oriented Particles. Comput. Graph. 2018, 70, 1–7. [Google Scholar] [CrossRef]
- Pinkall, U.; Polthier, K. Computing discrete minimal surfaces and their conjugates. Exp. Math. 1993, 2, 15–36. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, M.G. Least-Squares Estimation of Tangent Space for a Triangular Mesh. Appl. Sci. 2024, 14, 2834. https://doi.org/10.3390/app14072834
Choi MG. Least-Squares Estimation of Tangent Space for a Triangular Mesh. Applied Sciences. 2024; 14(7):2834. https://doi.org/10.3390/app14072834
Chicago/Turabian StyleChoi, Min Gyu. 2024. "Least-Squares Estimation of Tangent Space for a Triangular Mesh" Applied Sciences 14, no. 7: 2834. https://doi.org/10.3390/app14072834
APA StyleChoi, M. G. (2024). Least-Squares Estimation of Tangent Space for a Triangular Mesh. Applied Sciences, 14(7), 2834. https://doi.org/10.3390/app14072834