
Visual–Inertial Odometry of Structured and Unstructured Lines Based on Vanishing Points in Indoor Environments


Abstract
1. Introduction
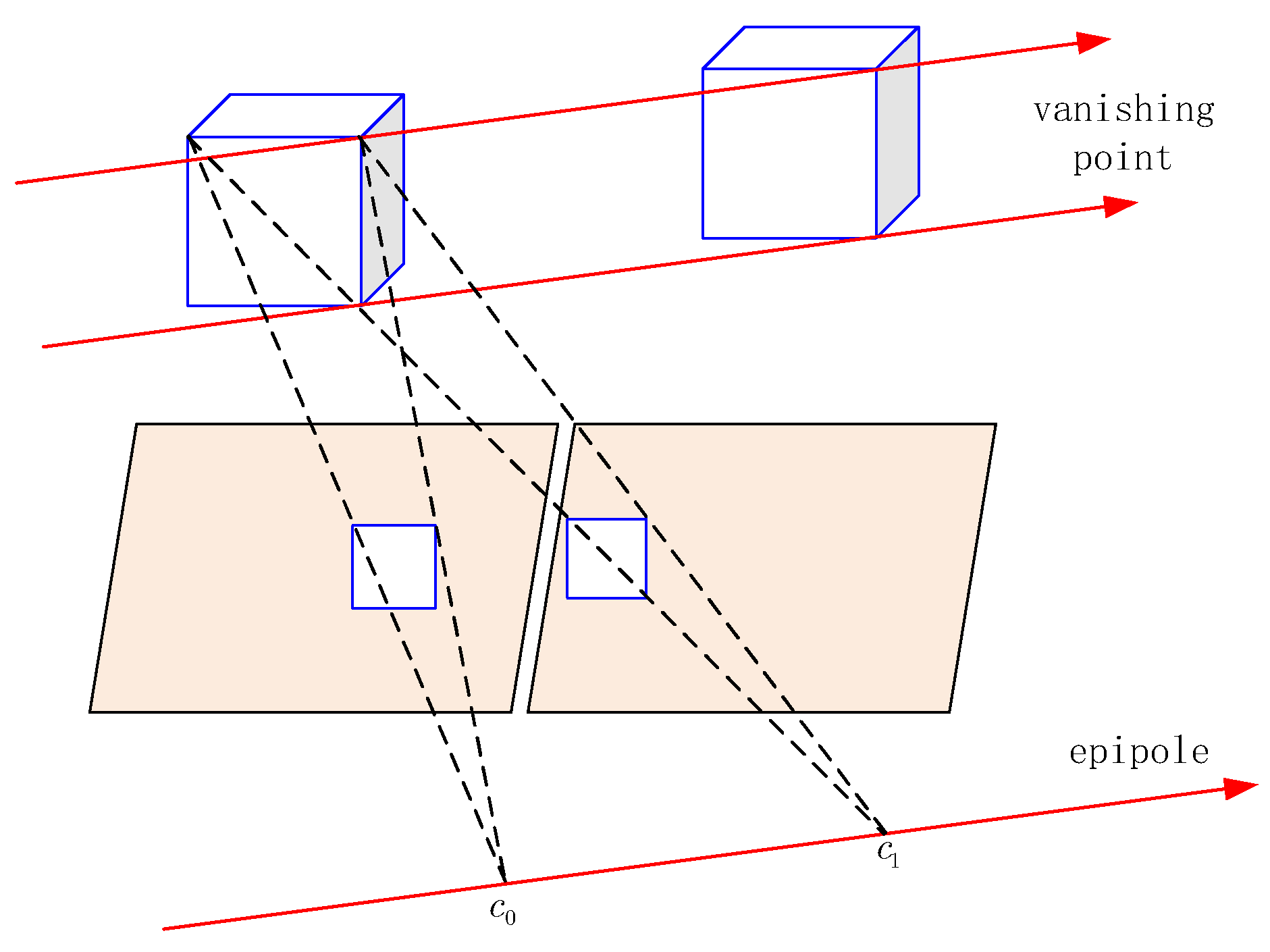
- Firstly, for the degeneracy problem caused by special positional line features during camera translation, a degeneracy phenomenon detection strategy is proposed to locate the line where the error occurs. Meanwhile, for the case of anomalous direction vectors in the Plücker coordinates, according to the coincidence between the vanishing point and epipole at infinity, the vanishing point feature is obtained to correct the vectors of the line feature and solve the degeneracy phenomenon.
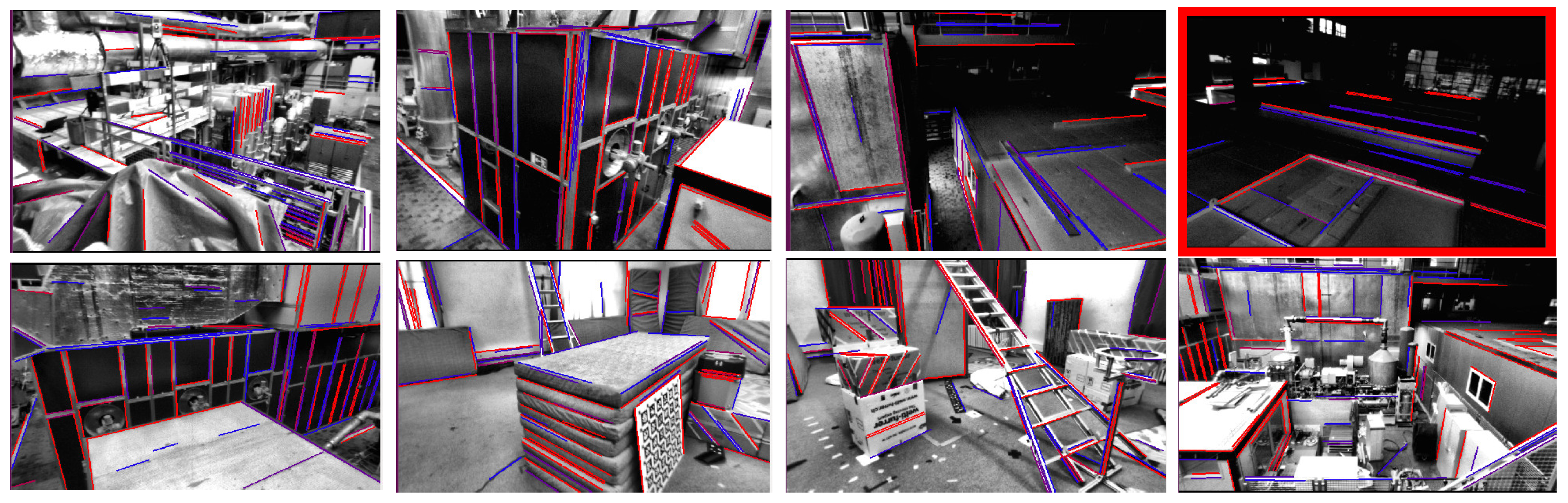
- Then, based on the characteristics of the distribution of line features in the Manhattan scene, the detected line features are categorized into structural and non-structural lines by setting length and angle threshold conditions between vanishing point and line features.
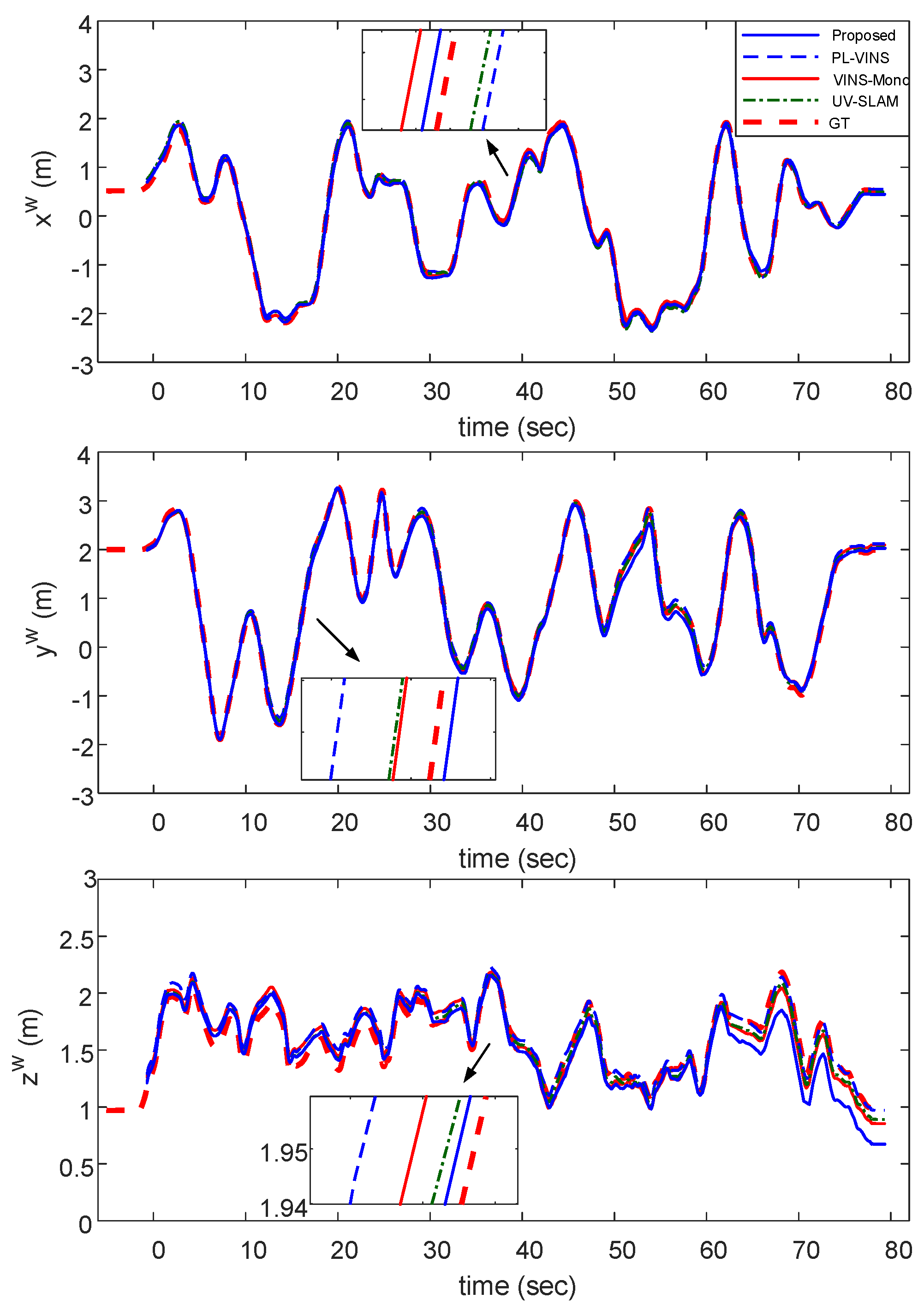
- Finally, the vanishing point residuals are added to the back-end optimization-based SLAM cost function. Experiments on two publicly available datasets validate that the proposed method improves the pose estimation and mapping accuracy of features in indoor complex environments.
2. Related Work
2.1. Line Feature Analysis
2.2. Vanishing Points Analysis
2.3. Manhattan World Analysis
3. Resolution of Degeneracy
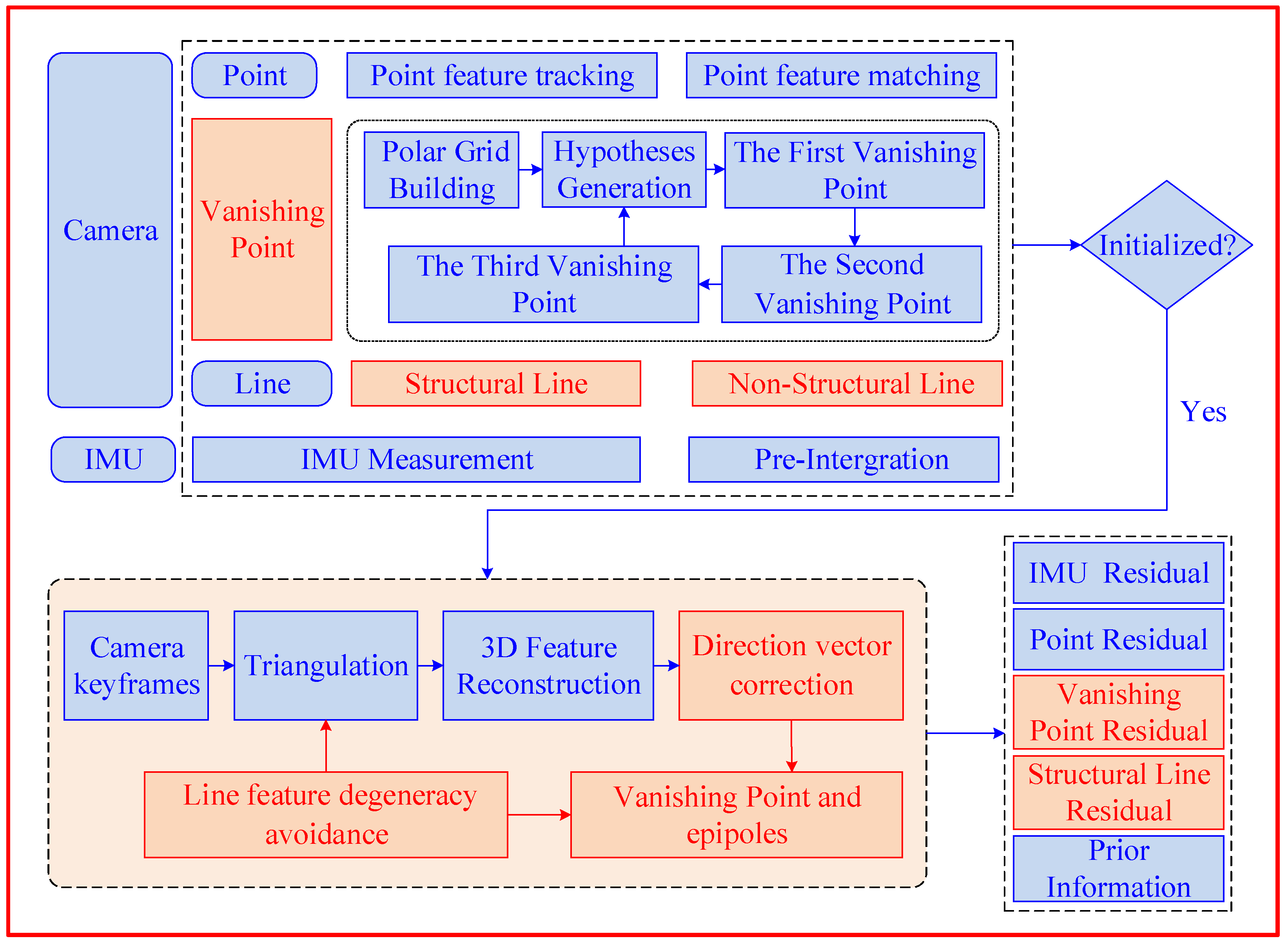
3.1. System Overview
3.2. Representation of Line Features
3.3. Degeneracy Phenomenon Detection
3.4. Degeneracy Analysis
3.5. Degeneracy Avoidance Based on Vanishing Points
4. Structure and Unstructured Lines
4.1. Estimation of Vanishing Points
4.2. Classification of Structured and Unstructured Lines
4.3. Back-End Optimization
5. Experimental Validation
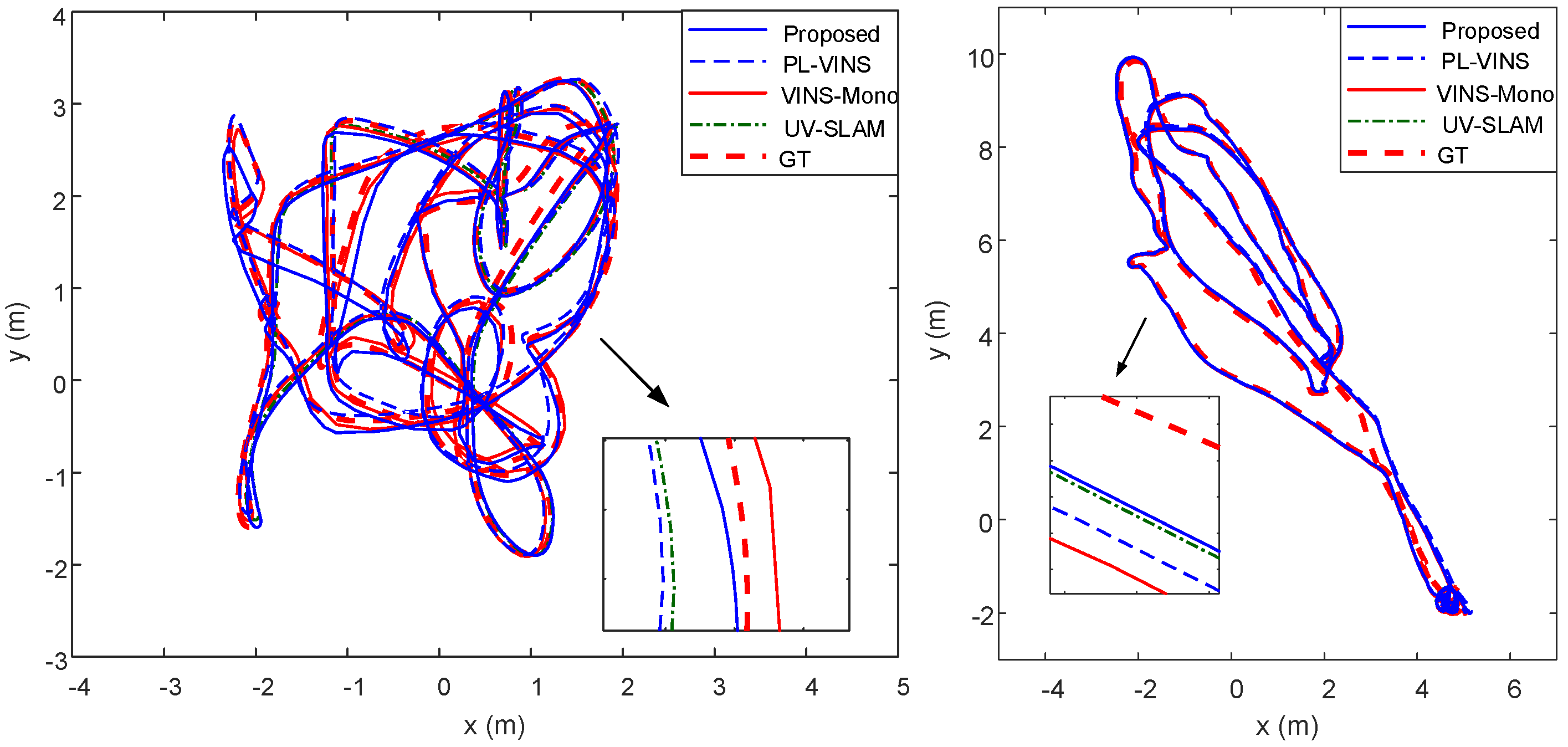
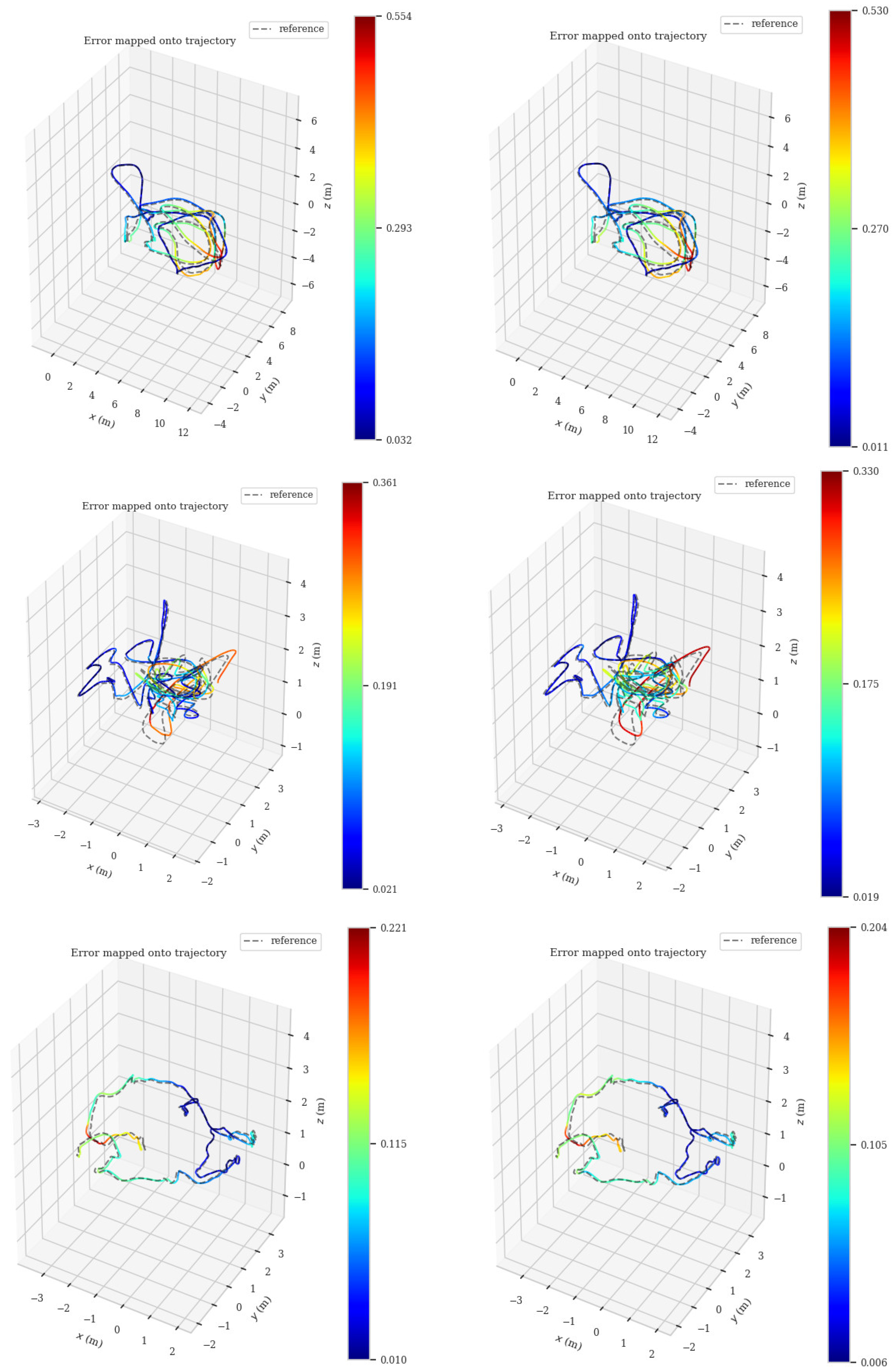
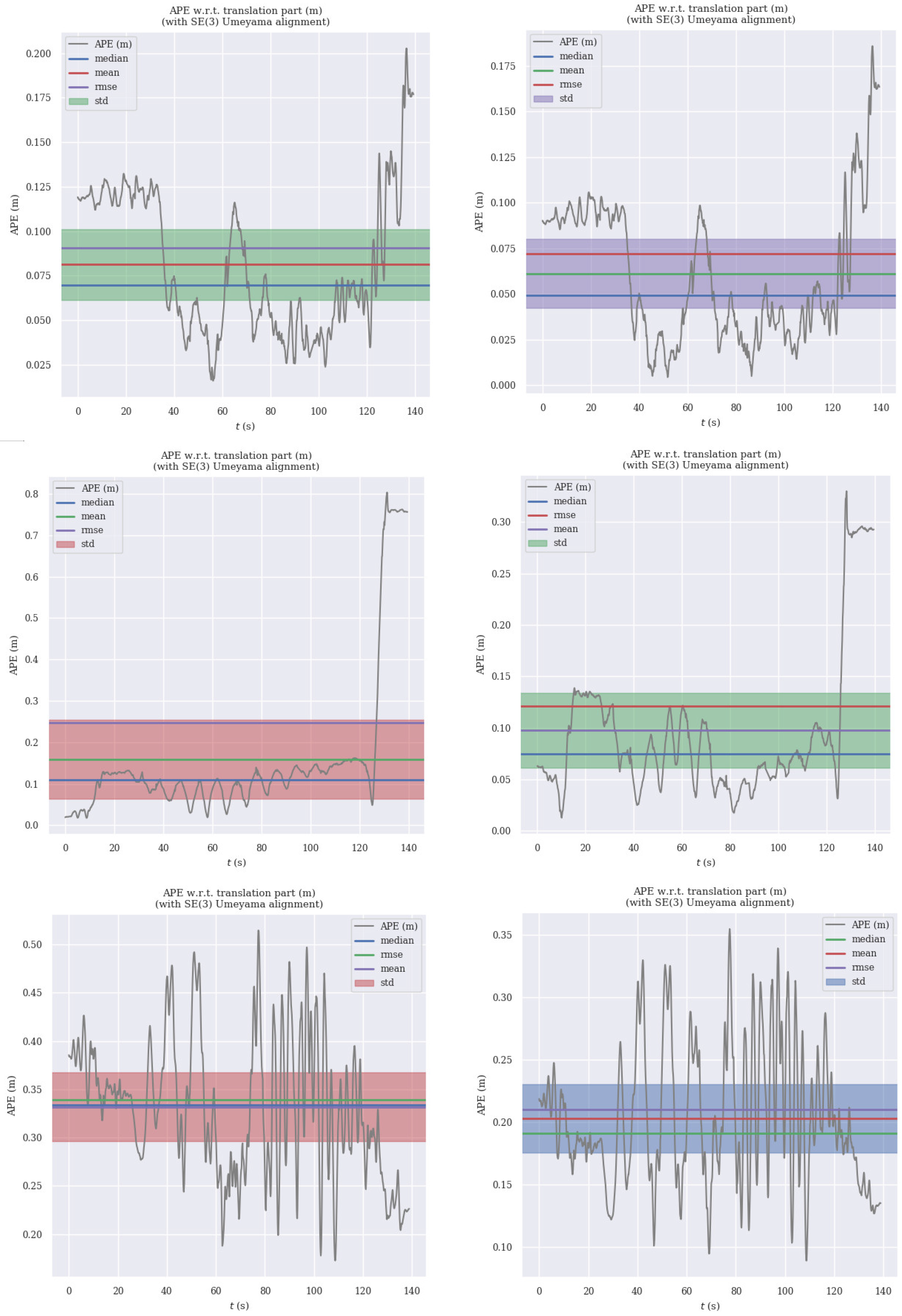
5.1. EuroC MAV Dataset
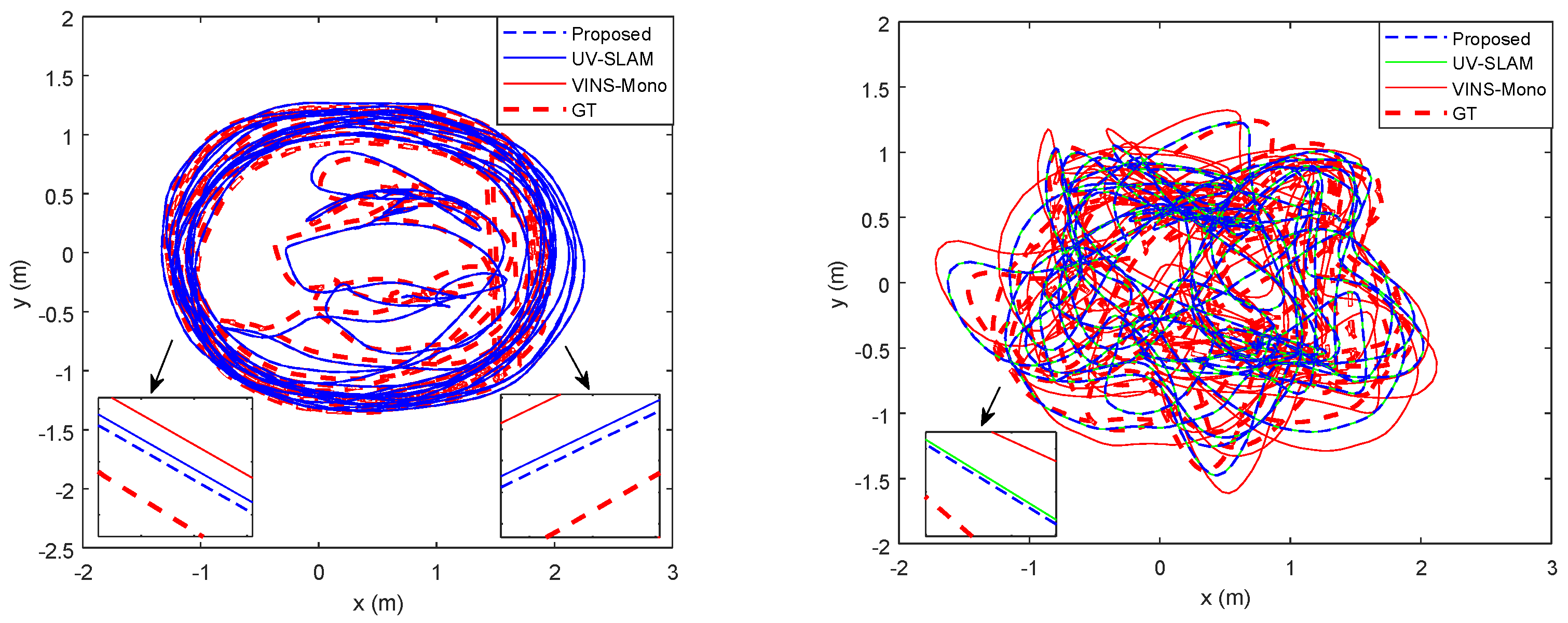
5.2. TUM-VI Benchmark Dataset
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jeon, J.; Jung, S.; Lee, E.; Choi, D.; Myung, H. Run your visual-inertial odometry on NVIDIA jetson: Benchmark tests on a micro aerial vehicle. IEEE Robot. Autom. Lett. 2021, 6, 5332–5339. [Google Scholar] [CrossRef]
- Campos, C.; Elvira, R. ORB-SLAM3: An accurate open-source library for visual, visual-inertial, and Multi-map SLAM. IEEE Trans. Robot. 2021, 37, 1874–1890. [Google Scholar] [CrossRef]
- Yang, N.; Stumberg, L.; Wang, R.; Cremers, D. D3VO: Deep depth, deep pose and deep uncertainty for monocular visual odometry. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Teng, Z.; Han, B.; Cao, J.; Hao, Q.; Tang, X.; Li, Z. PLI-SLAM: A Tightly-Coupled Stereo Visual-Inertial SLAM System with Point and Line Features. Appl. Sci. 2023, 15, 4678. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, Y.; Zhang, Z.; Postolache, O.; Mi, C. A vision-based container position measuring system for ARMG. Meas. Control 2023, 56, 596–605. [Google Scholar] [CrossRef]
- Duan, H.; Xin, L.; Xu, Y.; Zhao, G.; Chen, S. Eagle-vision-inspired visual measurement algorithm for UAV’s autonomous landing. Int. J. Robot. Autom. 2020, 35, 94–100. [Google Scholar] [CrossRef]
- Usenko, V.; Demmel, N.; Schubert, D.; Stückler, J.; Cremers, D. Visual inertial mapping with non-linear factor recovery. IEEE Robot. Autom. Lett. 2020, 5, 422–429. [Google Scholar] [CrossRef]
- Forster, C.; Pizzoli, M.; Scaramuzza, D. SVO: Fast semi-direct monocular visual odometry. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Engel, J.; Koltun, V.; Cremers, D. Direct sparse odometry. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 611–625. [Google Scholar] [CrossRef] [PubMed]
- Shen, S.; Michael, N.; Kumar, V. Tightly-coupled monocular visual-inertial fusion for autonomous flight of rotorcraft MAVs. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Li, M.; Mourikis, A. High-precision, consistent EKF-based visual inertial odometry. Int. J. Robot. Res. 2013, 32, 690–711. [Google Scholar] [CrossRef]
- Bloesch, M.; Burri, M.; Omari, S.; Hutter, M.; Siegwart, R. Iterated extended kalman filter based visual-inertial odometry using direct photometric feedback. Int. J. Robot. Res. 2017, 36, 1053–1072. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A robust and versatile monocular visual-inertial state estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef]
- Leutenegger, S.; Lynen, S.; Bosse, M.; Siegwart, R.; Furgale, P. Keyframe-based visual-inertial odometry using nonlinear optimization. Int. J. Robot. Res. 2014, 34, 314–334. [Google Scholar] [CrossRef]
- Greene, W.; Roy, N. Metrically-scaled monocular slam using learned scale factors. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020. [Google Scholar]
- Cui, H.; Tu, D.; Tang, F.; Xu, P.; Liu, H.; Shen, S. Vidsfm: Robust and accurate structure-from-motion for monocular videos. IEEE Trans. Image Proc. 2022, 31, 2449–2462. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Hwang, S. Elaborate monocular point and line slam with robust initialization. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- He, Y.; Zhao, J.; Guo, Y.; He, W.; Yuan, K. Pl-VIO: Tightly-coupled monocular visual–inertial odometry using point and line features. Sensors 2018, 18, 1159. [Google Scholar] [CrossRef] [PubMed]
- Fu, Q.; Wang, J.; Yu, H.; Ali, I.; Guo, F.; He, Y.; Zhang, H. PL-VINS: Real-time monocular visual-inertial SLAM with point and line features. arXiv 2020, arXiv:2009.07462. [Google Scholar]
- Lee, J.; Park, S. PLF-VINS: Real-time monocular visual-inertial SLAM with point-line fusion and parallel-line fusion. IEEE Robot. Autom. Lett. 2021, 6, 7033–7040. [Google Scholar] [CrossRef]
- Gomez-Ojeda, R.; Briales, J.; Gonzalez-Jimenez, J. PL-SVO: Semi-direct monocular visual odometry by combining points and line segments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016. [Google Scholar]
- Lim, H.; Jeon, J.; Myung, H. UV-SLAM: Unconstrained line-based SLAM using vanishing points for structural mapping. IEEE Robot. Autom. Lett. 2022, 7, 1518–1525. [Google Scholar] [CrossRef]
- Pumarola, A.; Vakhitov, A.; Agudo, A.; Sanfeliu, A.; Moreno-Noguer, F. PL-SLAM: Real-time monocular visual SLAM with points and lines. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar]
- Von Gioi, R.; Jakubowicz, J.; Morel, J.; Randall, G. LSD: A fast line segment detector with a false detection control. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 722–732. [Google Scholar] [CrossRef] [PubMed]
- Mur-Artal, R.; Tardós, J. ORB-SLAM2: An open-source slam system for monocular, stereo, and RGB-D cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef]
- Akinlar, C.; Topal, C. EDLines: A real-time line segment detector with a false detection control. Patt. Recog. Lett. 2011, 32, 1633–1642. [Google Scholar] [CrossRef]
- Liu, Z.; Shi, D.; Li, R.; Qin, W.; Zhang, Y.; Ren, X. PLC-VIO: Visual-Inertial Odometry Based on Point-Line Constraints. IEEE Trans. Autom. Sci. Eng. 2021, 19, 1880–1897. [Google Scholar] [CrossRef]
- Suárez, I.; Buenaposada, J.; Baumela, L. ELSED: Enhanced line SEgment drawing. arXiv 2022, arXiv:2108.03144. [Google Scholar] [CrossRef]
- Zhao, Z.; Song, T.; Xing, B.; Lei, Y.; Wang, Z. PLI-VINS: Visual-Inertial SLAM based on point-line feature fusion in Indoor Environment. Sensors 2022, 22, 5457. [Google Scholar] [CrossRef]
- Bevilacqua, M.; Berthoumieu, Y. Multiple-feature kernel-based probabilistic clustering for unsupervised band selection. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6675–6689. [Google Scholar] [CrossRef]
- Cipolla, R.; Drummond, T.; Robertson, D. Camera Calibration from Vanishing Points in Image of Architectural Scenes. In Proceedings of the British Machine Vision Conference 1999, Nottingham, UK, 13–16 September 1999; Volume 38, pp. 382–391. [Google Scholar]
- Chuang, J.; Ho, C.; Umam, A.; Chen, H.; Hwang, J.; Chen, T. Geometry-based camera calibration using closed-form solution of principal line. IEEE Trans. Image Process. 2021, 30, 2599–2610. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Meng, Z. Visual SLAM with drift-free rotation estimation in manhattan world. IEEE Robot. Autom. Lett. 2020, 5, 6512–6519. [Google Scholar] [CrossRef]
- Camposeco, F.; Pollefeys, M. Using vanishing points to improve visual-inertial odometry. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Li, Y.; Yunus, R.; Brasch, N.; Navab, N.; Tombari, F. RGB-D SLAM with structural regularities. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Li, X.; Zhu, L.; Yu, Z.; Guo, B.; Wan, Y. Vanishing Point Detection and Rail Segmentation Based on Deep Multi-Task Learning. IEEE Access 2020, 8, 163015–163025. [Google Scholar] [CrossRef]
- Kim, P.; Coltin, B.; Kim, H. Low-drift visual odometry in structured environments by decoupling rotational and translational motion. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018. [Google Scholar]
- Li, Y.; Brasch, N.; Wang, Y.; Navab, N.; Tombari, F. Structure-SLAM: Low-drift monocular SLAM in indoor environments. IEEE Robot. Autom. Lett. 2020, 5, 6583–6590. [Google Scholar] [CrossRef]
- Zou, D.; Wu, Y.; Pei, L.; Ling, H.; Yu, W. StructVIO: Visual-inertial odometry with structural regularity of man-made environments. IEEE Trans. Robot. 2019, 35, 999–1013. [Google Scholar] [CrossRef]
- Lu, X.; Yao, J.; Li, H.; Liu, Y.; Zhang, X. 2-line exhaustive searching for real-time vanishing point estimation in manhattan world. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision (WACV), Santa Rosa, CA, USA, 24–31 March 2017. [Google Scholar]
- Peng, X.; Liu, Z.; Wang, Q.; Kim, Y.; Lee, H. Accurate visual-inertial slam by manhattan frame re-identification. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021. [Google Scholar]
- Agarwal, S.; Mierle, K. Ceres Solver. Available online: http://ceres-solver.org (accessed on 9 April 2018).
- Bartoli, A.; Sturm, P. Structure-from-motion using lines: Representation, triangulation, and bundle adjustment. Comput. Vis. Image Underst. 2005, 100, 416–441. [Google Scholar] [CrossRef]
- Burri, M.; Nikolic, J.; Siegwart, R. The EuRoC micro aerial vehicle datasets. Int. J. Robot. Res. 2016, 35, 1157–1163. [Google Scholar] [CrossRef]
- Schubert, D.; Goll, T.; Demmel, T.; Usenko, V.; Stückler, J.; Cremers, D. The TUM VI benchmark for evaluating visual-inertial odometry. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Line Feature Analysis | Characteristics |
|---|---|
| [23] | Combining line features with point features using the LSD algorithm. |
| [19] | Modifying the parameters of the LSD algorithm for real-time extraction of line features. |
| [20] | Fusing line features and corner features using positional similarity. |
| [26] | Detection of line features using the ED algorithm to improve extraction speed. |
| [27] | An algorithm capable of extracting line features with geometric constraints is proposed. |
| [28] | Improving line segment detection efficiency with ELSED with a local line segment growth algorithm. |
| [29] | Setting an adaptive threshold algorithm for the line segment extraction process. |
| [30] | Proposed probabilistic clustering of line segments using descriptors based on grid computing. |
| Vanishing Points Analysis | Characteristics |
|---|---|
| [20] | Proposing parallel line features based on clustering of vanishing points. |
| [32] | Estimating the intrinsic parameters of the camera using vanishing points for camera calibration. |
| [33] | Proposing a two-module method for estimating vanishing points to ensure precise vanishing points for each frame’s cluster of line features. |
| [34] | Inertial-based measurements to detect vanishing points and continuous updating by the least squares method. |
| [35] | Involvement of vanishing points in deep multitask learning algorithms for camera tuning. |
| [36] | Projecting the vanishing point directions of 3D lines and plane normals onto the tangent plane of a unit sphere for estimating the rotation matrix. |
| Manhattan World Analysis | Characteristics |
|---|---|
| [37] | Utilizing structural features in RGB-D images to estimate rotational and translational motion, reducing drift during motion. |
| [38] | Utilizing structured lines in the Manhattan world as mapping features to encode global directional information. |
| [39] | Utilizing the Atlanta world model containing different Manhattan directions to define a starting frame coordinate system representing each heading direction. |
| [40] | Redefining the classification of line features is based on the advantage that unstructured lines are not constrained by the environment. |
| [41] | Proposing a new Manhattan frame re-identification method based on rotation constraints from MF match pairs, improving the accuracy of vanishing point estimation. |
| [36] | Projecting the vanishing point directions of 3D lines and plane normals onto the tangent plane of a unit sphere for estimating the rotation matrix. |
| Experiment | VINS-Mono | PL-VINS | UV-SLAM | Proposed |
|---|---|---|---|---|
| MH_01_easy | 0.230 | 0.234 | 0.212 | 0.200 |
| MH_02_easy | 0.164 | 0.160 | 0.154 | 0.148 |
| MH_03_medium | 0.251 | 0.250 | 0.247 | 0.238 |
| MH_04_difficult | 0.462 | 0.358 | 0.356 | 0.351 |
| MH_05_difficult | 0.334 | 0.326 | 0.325 | 0.313 |
| V1_01_easy | 0.085 | 0.083 | 0.078 | 0.078 |
| V1_02_medium | 0.142 | 0.165 | 0.106 | 0.096 |
| V1_03_difficult | 0.184 | 0.178 | 0.174 | 0.167 |
| V2_01_easy | 0.097 | 0.098 | 0.091 | 0.086 |
| V2_02_medium | 0.266 | 0.111 | 0.114 | 0.112 |
| V2_03_difficult | 0.328 | 0.351 | 0.334 | 0.333 |
| Average | 0.231 | 0.201 | 0.199 | 0.193 |
| Enhance | 19.07% | 8.35% | 2.88% | — |
| Experiment | VINS-Mono | UV-SLAM | Proposed |
|---|---|---|---|
| room1_512_16 | 0.094 | 0.079 | 0.071 1 |
| room2_512_16 | 0.069 | 0.068 | 0.067 |
| room3_512_16 | 0.248 | 0.127 | 0.121 |
| room4_512_16 | 0.041 | 0.042 | 0.042 |
| room5_512_16 | 0.340 | 0.216 | 0.210 |
| room6_512_16 | 0.071 | 0.069 | 0.070 |
| slide1_512_16 | 0.583 | 0.495 | 0.426 |
| Average | 0.206 | 0.157 | 0.144 |
| Enhance | 42.80% | 8.65% | — |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, X.; Li, B.; Qiu, S.; Liu, K. Visual–Inertial Odometry of Structured and Unstructured Lines Based on Vanishing Points in Indoor Environments. Appl. Sci. 2024, 14, 1990. https://doi.org/10.3390/app14051990
He X, Li B, Qiu S, Liu K. Visual–Inertial Odometry of Structured and Unstructured Lines Based on Vanishing Points in Indoor Environments. Applied Sciences. 2024; 14(5):1990. https://doi.org/10.3390/app14051990
Chicago/Turabian StyleHe, Xiaojing, Baoquan Li, Shulei Qiu, and Kexin Liu. 2024. "Visual–Inertial Odometry of Structured and Unstructured Lines Based on Vanishing Points in Indoor Environments" Applied Sciences 14, no. 5: 1990. https://doi.org/10.3390/app14051990
APA StyleHe, X., Li, B., Qiu, S., & Liu, K. (2024). Visual–Inertial Odometry of Structured and Unstructured Lines Based on Vanishing Points in Indoor Environments. Applied Sciences, 14(5), 1990. https://doi.org/10.3390/app14051990