1. Introduction
The ankle joint is an important part of the body’s lower-limb weight support for maintaining body balance. In various life and work areas, ankle joint injury is one of the most common joint injuries [
1]. The exercise methods for treating ankle joint injuries in different rehabilitation stages include joint activity training, proprioception training and so on. Ankle joint activity training mainly includes ankle joint plantar flexion/dorsiflexion and eversion/inversion movements. However, the foot height of different patients varies. Thus, the mechanism of such training needs to have a 2R1T motion mode. During the course of ankle proprioception training, the ankle joint needs to tilt a board and move forward and backward along the tilted board [
2]. Thus, its mechanism needs to have a 2T1R motion mode. A parallel mechanism has the advantages of small kinematic error, high precision and a strong load capacity. Thus, parallel ankle joint rehabilitation mechanism has gradually become a hotspot in the field of medical rehabilitation.
Compared to a six-degree-of-freedom parallel mechanism, a parallel mechanism with fewer degrees of freedom has the advantages of a simple structure and easy control. Thus, parallel mechanisms with fewer degrees of freedom are widely used in the field of ankle rehabilitation. Zuo et al. [
3] proposed a wearable parallel ankle joint rehabilitation mechanism and analyzed the performance index based on the inverse position and Jacobian matrix. Liao et al. [
4] proposed a hybrid ankle rehabilitation robot. Based on the screw theory, an inverse kinematics model and the Jacobian matrix of the mechanism were obtained, and its singularity was analyzed. Zou et al. [
5] proposed an ankle rehabilitation mechanism based on a 3-RRS parallel mechanism, which could achieve single-degree-of-freedom rehabilitation training and multi-degree-of-freedom rehabilitation training of plantar flexion/dorsiflexion, eversion/inversion and adduction/abduction. Russo et al. [
6] analyzed the kinematics and statics model of a cable-driven S-4SPS wearable parallel ankle joint mechanism. Jamwal et al. [
7] used a preference-based approach and an NSGA-II algorithm to optimize the workspace and condition number of a three-degrees-of-freedom wearable ankle joint rehabilitation parallel mechanism. Zeng et al. [
8] proposed a hybrid rehabilitation mechanism based on 2-CPRR-PU/R complete decoupling, and then optimized the structural parameters of the mechanism.
The training methods at different stages have different requirements for the degree of freedom and performance of the mechanism used. The traditional parallel mechanism has a fixed degree of freedom and exhibits little adaptability to different rehabilitation stages. A reconfigurable parallel mechanism can transform the degree of freedom and has stronger adaptability to patients’ rehabilitation stages, which can better meet the needs of patients. Liu et al. [
9] proposed an ankle joint rehabilitation robot based on the 2-UPU/RPU parallel mechanism, which can switch between the 2R2T (R represents rotation and T represents translation) and 2R1T motion modes. Zhang et al. [
10] proposed a redundantly actuated reconfigurable parallel ankle joint rehabilitation mechanism, which can adjust the workspace and driving torque of the mechanism according to different training requirements. Ye et al. [
11] proposed a 3-SvPS reconfigurable parallel mechanism that can switch between the four motion modes of 3R3T, 3R2T, 3R1T and 2R1T. Hu et al. [
12] proposed a reconfigurable parallel spherical pair that can perform one-dimensional fixed-axis rotation and one-dimensional variable-axis rotation, while two-dimensional and three-dimensional rotations are also produced. Tian et al. [
13] designed a reconfigurable platform based on the Bricard link and constructed a 3-
RARAPaRARB parallel mechanism for the reconfigurable platform. Chablat et al. [
14] developed a 3-PRPiR parallel robot, which can operate in five operation modes without crossing any constraint singularity, including a 3T operation mode and four 2T1R operation modes, by using a lockable prismatic pair Pi and a revolute pair R. Wu et al. [
15] proposed a reconfigurable parallel mechanism based on a 3-RRR spherical parallel mechanism, which can switch between the 1T3R motion mode and 3R motion mode, and analyzed its workspace, dexterity and singularity. Huang et al. [
16] proposed a single-loop and multi-loop reconfigurable platform, and they analyzed and optimized the workspace, dexterity and payload index of a 3-PUU reconfigurable parallel mechanism based on this reconfigurable platform. Gan et al. [
17] proposed a 3-rRPS reconfigurable parallel mechanism that can be converted between the 3R motion mode and 1T2R motion mode.
During the course of rehabilitation training, the rotation center of the rehabilitation mechanism being used is consistent with the rotation center of the ankle. The traditional 1T2R parallel mechanism generally has a parasitic motion, which can easily cause secondary damage to patients. Liu et al. [
18] proposed a 3-RRPRR variable spherical symmetric parallel mechanism with circular arc-shaped kinematic pairs and proved that there is no parasitic motion of the mechanism by analyzing its geometric characteristics. Chen et al. [
19] proposed a 2RPU-RPS-UPS parallel mechanism without parasitic motion, verified its non-parasitic motion characteristics by using the screw theory, and analyzed its motion/force transmission performance and dynamic performance. Nayak et al. [
20] used the maximum parasitic motion in the maximum inscribed circle of the workspace as the parasitic motion index of a 3-[PP]S parallel mechanism, and they compared the directional motion ability and parasitic motion of the 3-PPS parallel mechanism in different modes. Nigatu et al. [
21] formulated a parasitic motion equation in terms of velocity and used the quasi-Newton method to optimize the parasitic motion in the workspace. Shen et al. [
22] proposed a kind of 2T1R parallel mechanism without parasitic motion, and analyzed and compared the performance indexes, such as the workspace and rotation ability of the mechanism, under different configurations.
A branched chain with actuation redundancy can improve the accuracy of a mechanism, enhance the load capacity and improve the stiffness of the mechanism [
23,
24]. Wang et al. [
25] proposed a redundantly actuated 1T2R parallel lower-limb rehabilitation mechanism and optimized the performance index of the mechanism by means of a genetic algorithm. Zhang et al. [
26] proposed a planar 2T1R redundant parallel mechanism and analyzed its workspace and stiffness. Xu et al. [
27,
28] analyzed the motion/force transmission performance of a 1T2R redundantly actuated parallel mechanism and optimized the mechanisms based on this performance index. Fang et al. [
29] concluded that the reachable workspace of a 2UPR&1RPS&1RPU redundantly actuated parallel mechanism is the intersection of its non-redundantly actuated forms. Wang et al. [
30] obtained the dimensionless Jacobian matrix of a 2PUR-2PRU redundantly actuated parallel mechanism by using the characteristic length method and analyzed the dexterity of the mechanism based on the dimensionless Jacobian matrix.
According to the structure characteristics of the ankle joint, this paper proposes a reconfigurable parallel mechanism without parasitic motion, which can be converted to the 1T2R motion mode and 2T1R motion mode to meet the degree of freedom required for ankle rehabilitation training. The rest of the paper is organized as follows. In
Section 2, the mechanism configuration, vA kinematic pair, degree of freedom and non-parasitic motion characteristics are analyzed. In
Section 3, an inverse kinematics model of the mechanism in the two motion modes is established, and the singularity of the mechanism is analyzed. In
Section 4, the performance indexes of a redundantly actuated parallel mechanism and a non-redundantly actuated parallel mechanism in the two motion modes are analyzed and compared. In
Section 5, the performance index of the proposed mechanism in the two motion modes is taken as the objective function, and a particle swarm algorithm is used to optimize the dimension parameters of the mechanism. Conclusions are drawn in
Section 6.
2. Mechanism Analysis
2.1. Configuration Analysis
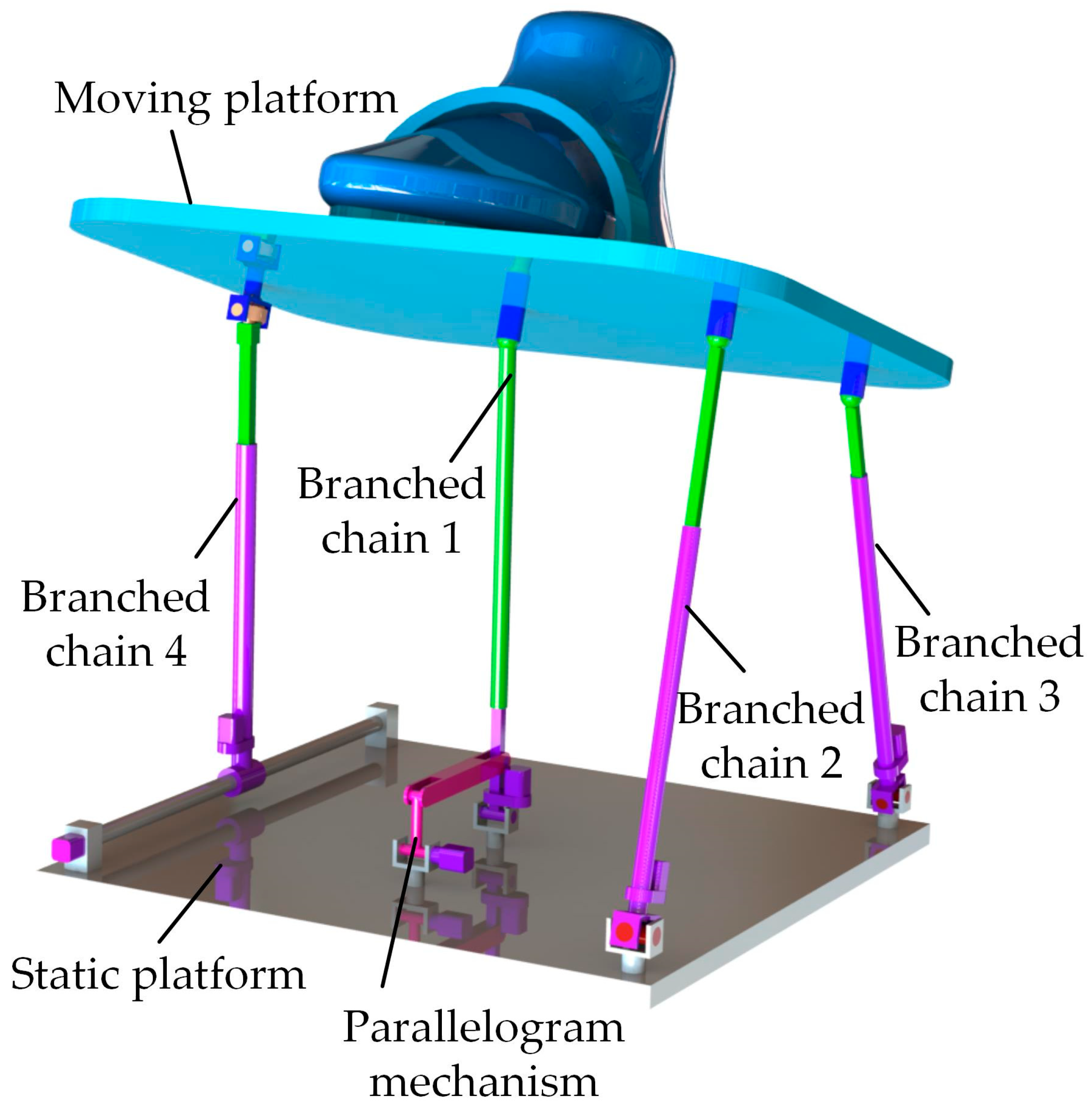
The proposed reconfigurable parallel mechanism is composed of a static platform, a moving platform, four branched chains and a parallelogram mechanism, as shown in
Figure 1. Branched chain 1 is an RPS branched chain. The rotation centers of the revolute pair and spherical pair are located at the centers of the static platform and moving platform, respectively. The axis of the revolute pair is perpendicular to the axis of the cylindrical pair of branched chain 4. Branched chain 1 is connected in series with the parallelogram mechanism. When the axis of the prismatic pair in branched chain 1 is perpendicular to the plane of the static platform at all times under the action of the parallelogram mechanism, branched chain 1 is in the PS mode. Branched chains 2 and 3 are a UPS-I branched chain and a UPS-II branched chain, respectively. Their structure is the same, which is symmetrically arranged, and branched chain 3 is used as the branched chain with actuation redundancy. Branched chain 4 includes a cylindrical pair, a prismatic pair and a vA pair, and the vA pair is located at the midpoint of the side.
2.2. vA Pair Analysis
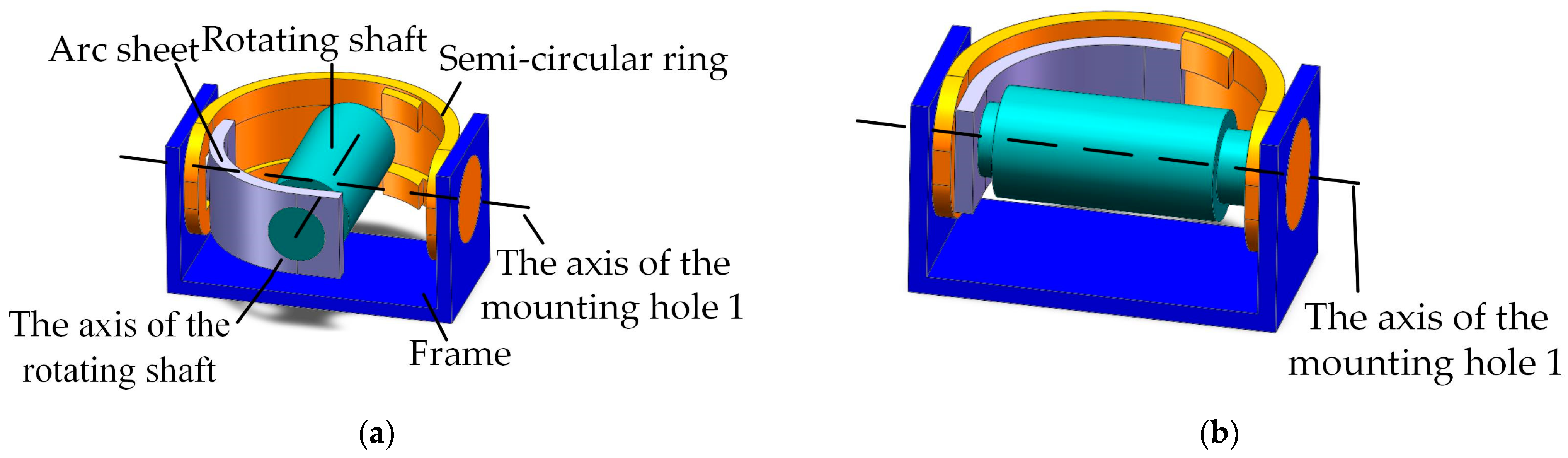
The vA pair is composed of a frame, a semi-circular ring, an arc sheet and a rotating shaft, which can be converted between the universal joint mode and the revolute-pair mode. The left and right sides of the frame are processed with mounting hole 1, and the left and right sides of the outside of the semi-circular ring are processed with mounting shaft 1. Mounting shaft 1 and mounting hole 1 are matched, and the semi-circular ring can rotate around the axis of mounting hole 1.
The inside of the semi-circular ring is processed with a groove and a limit block. One side of the arc sheet is processed with mounting hole 2, and the other side is processed with mounting shaft 2 on the outside. Mounting hole 2 is matched with the rotating shaft, and mounting shaft 2 is tangent to the top and bottom surfaces of the groove. The rotating shaft can rotate around the axis of mounting hole 2, and the arc sheet drives the rotating shaft to rotate around the axis of the semi-circular ring to change the position of the axis position of the rotating shaft.
When the rotating shaft is driven by the arc sheet to the limit position on the inner side of the semi-circular ring groove, that is, when mounting shaft 2 is tangent to the side of the groove, the axis of the rotating shaft is perpendicular to the axis of mounting hole 1, and the vA pair is in the universal joint mode, which can rotate around the axis of mounting hole 1 and the axis of the rotating shaft, as shown in
Figure 2a.
When the arc sheet is in contact with the side of the limit block on the inner side of the semi-circular ring, the axis of the rotating shaft coincides with the axis of mounting hole 1, and the vA pair is in the revolute-pair mode, which can rotate around the axis of mounting hole 1, as shown in
Figure 2b.
2.3. Calculation of Degree of Freedom
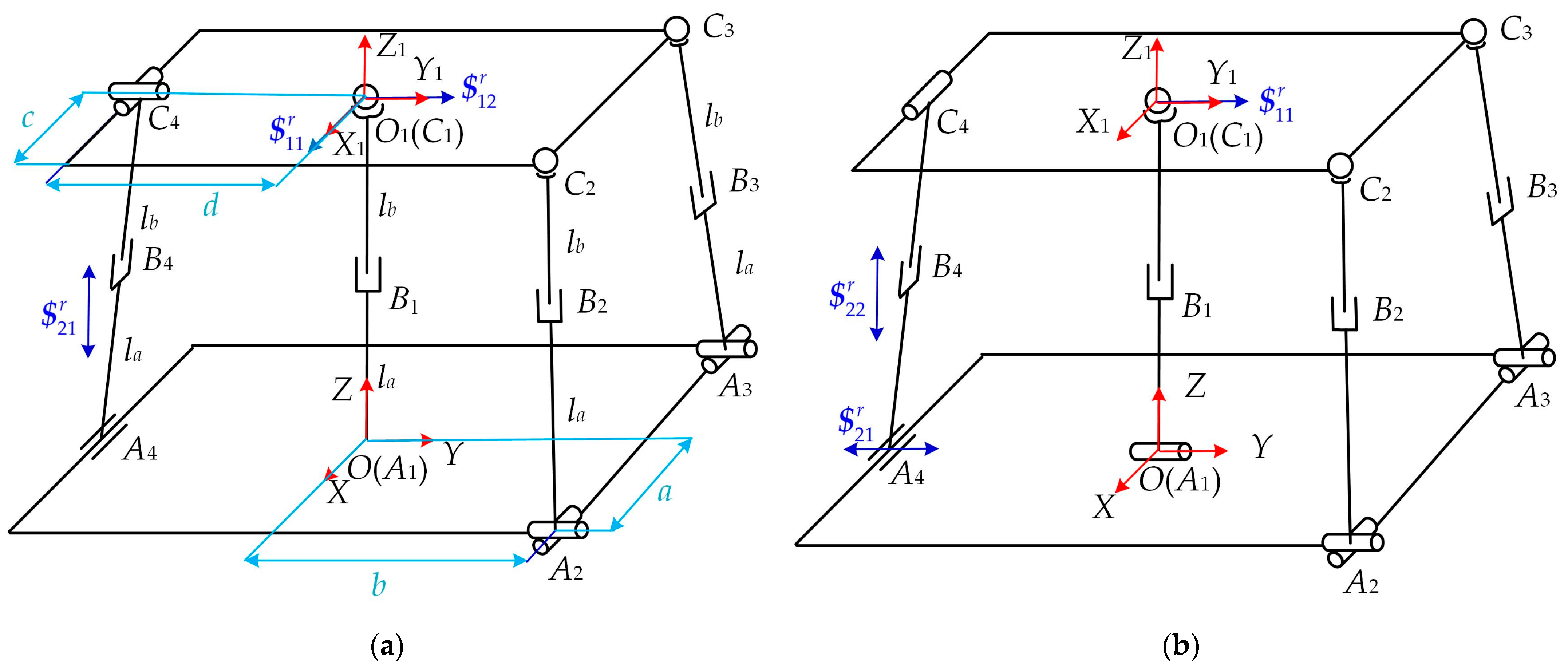
O and O1 are the center points of the static and moving platforms, respectively. Ai (i = 1, 2, 3, 4) and Ci (i = 1, 2, 3, 4) are the intersections of the kinematic pairs of each branched chain with the static platform and the moving platform, respectively. The distance between Ai (i = 2, 3) and the O point along the X-axis direction is a; the distance between Ai (i = 2, 3, 4) and the O point along the Y-axis direction is b; the distance between Ci (i = 2, 3) and the O1 point along the X1-axis direction is c; and the distance between Ci (i = 2, 3, 4) and the O1 point along the Y1-axis is d. la is the length of BiAi (i = 1, 2, 3, 4), while lb is the length of CiBi (i = 1, 2, 3, 4).
The static coordinate system is established with the center
O of the static platform as the origin. The
Y axis is from the
O point to the midpoint of
A2A3, the
X axis is from the
A3 point to the
A2 point, and the
Z axis is perpendicular to the static platform and its direction is upward. The moving coordinate system is established with the center
O1 of the moving platform as the origin. The
Y1 axis is from the
O1 point to the midpoint of
C2C3, the
X1 axis is from the
C3 point to the
C2 point, and the
Z1 axis is perpendicular to the moving platform and pointing away from the mechanism, as shown in
Figure 3.
When branched chain 1 is in the PS mode and the vA pair is in the universal joint mode, the mechanism is in the 1T2R motion mode, as shown in
Figure 3a; when branched chain 1 is in the RPS mode and the vA pair is in the revolute-pair mode, the mechanism is in the 2T1R motion mode, as shown in
Figure 3b.
The constraint screw system is represented by the arrows shown in
Table 1.
2.3.1. 1T2R Motion Mode
When branched chain 1 is in the PS mode, the kinematic screw of each kinematic pair on branched chain 1 is
The reciprocal screw of branched chain 1 in the PS mode can be obtained as
Branched chain 1 provides two constraint forces parallel to the
X axis and
Y axis, and both pass through the rotation center of the spherical pair, as shown in
Figure 3a.
When the vA pair is in the universal joint mode, the kinematic screw of each kinematic pair on branched chain 4 is
When the vA pair is in the universal joint mode, the reciprocal screw of branched chain 4 can be obtained as
In the above equations, e11, e12, g12, e13, f13, g13, e14, f14 and g14 are different real numbers.
Branched chain 4 provides a constraint couple that is parallel to the
Z axis, as shown in
Figure 3a.
Branched chain 2 and branched chain 3 pose no constraints on the moving platform; thus, they are not analyzed.
By combining Equations (2) and (4), the kinematic screw system of the moving platform can be obtained as
From the kinematic screw system in Equation (5), it can be concluded that the moving platform has 1T2R degrees of freedom, which encompass two rotational degrees of freedom that bypass the origin O1 of the moving coordinate system and are parallel to the X axis and Y axis, together with one translational degree of freedom along the Z axis.
When branched chain 1 is in the PS mode and the vA pair is in the universal joint mode, the modified G-K formula is used to calculate the degree of freedom of the mechanism as follows:
where
d is the order of the mechanism,
n is the number of mechanism links,
g is the number of kinematic pairs of the mechanism,
fi is the degree of freedom of the kinematic pairs of the mechanism,
v is the number of parallel redundant constraints, and
ζ is the number of passive degrees of freedom.
It is concluded that when branched chain 1 is in the PS mode and the vA pair is in the universal joint mode, the degree of freedom of the mechanism is 3, and the moving platform is constrained by two constraint forces and one constraint couple. The two constraint forces are parallel to the X axis and Y axis, and always intersect vertically at the center point of the moving platform, which restricts the translation of the moving platform along the X axis and Y axis. The constraint couple is parallel to the Z axis and constrains the rotation of the moving platform around the Z axis. When in motion, the positional relationship between the two constraint forces and the one constraint couple remains unchanged, and the constraint property of the moving platform does not change. Therefore, when branched chain 1 is in the PS mode and the vA pair is in the universal joint mode, the motion mode of the mechanism is 1T2R, and the degree of freedom is full-cycle.
2.3.2. 2T1R Motion Mode
When branched chain 1 is in the RPS mode, the kinematic screw of each kinematic pair on branched chain 1 is
The reciprocal screw of branched chain 1 in the RPS mode can be obtained as
Branched chain 1 provides a constraint force parallel to the
Y axis, which passes through the rotation center of the spherical pair, as shown in
Figure 3b.
When the vA pair is in the revolute-pair mode, the kinematic screw of each kinematic pair on branched chain 4 is
When the vA pair is in the revolute-pair mode, the reciprocal screw of branched chain 4 can be obtained as
Branched chain 4 provides two constraint couples parallel to the
Y axis and
Z axis, as shown in
Figure 3b.
In the above equations, e21, f21, e22, f22, e23, e24, f24, f25 and g25 are different real numbers.
By combining Equations (8) and (10), the kinematic screw system of the moving platform can be obtained as
From the kinematic screw system in Equation (11), it can be concluded that the moving platform has 2T1R degrees of freedom, which encompass two translational degrees of freedom along the X axis and Z axis, and a rotational degree of freedom that bypasses the origin O1 of the moving coordinate system and is parallel to the X axis.
When branched chain 1 is in the RPS mode and the vA pair is in the revolute-pair mode, the modified G-K formula is used to calculate the degree of freedom of the mechanism as follows:
It is concluded that when branched chain 1 is in the RPS mode and the vA pair is in the revolute-pair mode, the degree of freedom of the mechanism is 3, and the moving platform is constrained by two constraint couples and one constraint force. The two constraint couples are parallel to the Y axis and the Z axis in order to constrain the rotation of the moving platform around the Y axis and the Z axis, respectively. The constraint force that bypasses the origin O1 of the moving coordinate system and is parallel to the Y axis constrains the translation of the moving platform along the Y axis. When in motion, the positional relationship between the two constraint couples and the one constraint force remains unchanged, and the constraint property of the moving platform does not change. Therefore, when branched chain 1 is in the RPS mode and the vA pair is in the revolute-pair mode, the motion mode of the mechanism is 2T1R, and the degree of freedom is full-cycle.
Based on the above analysis, when branched chain 1 is in the PS mode and the vA pair is in the universal joint mode, the mechanism is in the 1T2R motion mode, and the degree of freedom is full-cycle. When branched chain 1 is in the RPS mode and the vA pair is in the revolute-pair mode, the mechanism is in the 2T1R motion mode, and the degree of freedom is full-cycle.
When the mechanism is in the 1T2R motion mode, the prismatic pairs of the four branched chains are used as the driving pairs. When the mechanism is in the 2T1R motion mode, the prismatic pairs of branched chains 1, 2 and 3 and the cylindrical pair of branched chain 4 are used as the driving pairs. In both motion modes, the degree of freedom of the moving platform of the mechanism is 3, and the number of driving pairs is 4, which represent a redundantly actuated parallel mechanism.
2.4. Non-Parasitic Motion Analysis
The calculation formulae for the position and orientation characteristic (POC) set of series and parallel mechanisms are as follows:
where
is the POC set of the
i-th kinematic pair;
is the POC set at the end of the
i-th branched chain; and
is the POC set of the mechanism’s moving platform.
2.4.1. Analysis of Non-Parasitic Motion of the Mechanism in the 1T2R Motion Mode
A branched chain that is composed of links and pairs in series is called a Single Opened Chain (SOC). Therefore, the topological structure of branched chain 1 is SOC1{-P11-S12-}, the topological structure of branched chains 2 and 3 is SOCi{-Ui1-Pi2-Si3-} (i = 2, 3), and the topological structure of branched chain 4 is SOC4{-C41-P42-U43-}. The center point O1 of the moving platform is selected as the reference point.
In accordance with Equation (13), the POC sets of the branched chains in the 1T2R motion mode are as follows:
where
t and
r represent translation and rotation, respectively, and the superscript is the number of translational/rotational motion.
In accordance with Equation (14), the POC set of the moving platform in the 1T2R motion mode is
The number of degrees of freedom of the mechanism is 3. Since the number of independent elements of the POC set of the moving platform is not greater than the number of degrees of freedom of the mechanism, the POC set of the moving platform can have three independent elements. It can be seen from the calculation of that there is one independent translation and two independent rotations of the moving platform, and there is no non-independent parasitic motion.
2.4.2. Analysis of Non-Parasitic Motion of the Mechanism in the 2T1R Motion Mode
In the 2T1R motion mode, the topological structure of branched chain 1 is SOC1{-R11-P12-S13-}, the topological structure of branched chains 2 and 3 is SOCi{-Ui1-Pi2-Si3-} (i = 2, 3), and the topological structure of branched chain 4 is SOC4{-C41-P42-R43-}. The center point O1 of the moving platform is selected as the reference point.
In accordance with Equation (13), the POC sets of the branched chains in the 2T1R motion mode are as follows:
In accordance with Equation (14), the POC set of the moving platform in the 2T1R motion mode is
The number of degrees of freedom of the mechanism is 3. Since the number of independent elements of the POC set of the moving platform is not greater than the number of degrees of freedom of the mechanism, the POC set of the moving platform can have three independent elements. It can be seen from the calculation of that there are two independent translations and one independent rotation of the moving platform, and there is no non-independent parasitic motion.
Based on the above analysis, when branched chain 1 is in the PS mode and the vA pair is in the universal joint mode, the mechanism is a 1T2R parallel mechanism without parasitic motion. When branched chain 1 is in the RPS mode and vA pair is in the revolute-pair mode, the mechanism is a 2T1R parallel mechanism without parasitic motion.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

