
Risk-Quantification Method for Car-Following Behavior Considering Driving-Style Propensity


Abstract
1. Introduction
2. Driving Style Propensity
2.1. Driving Behaviors
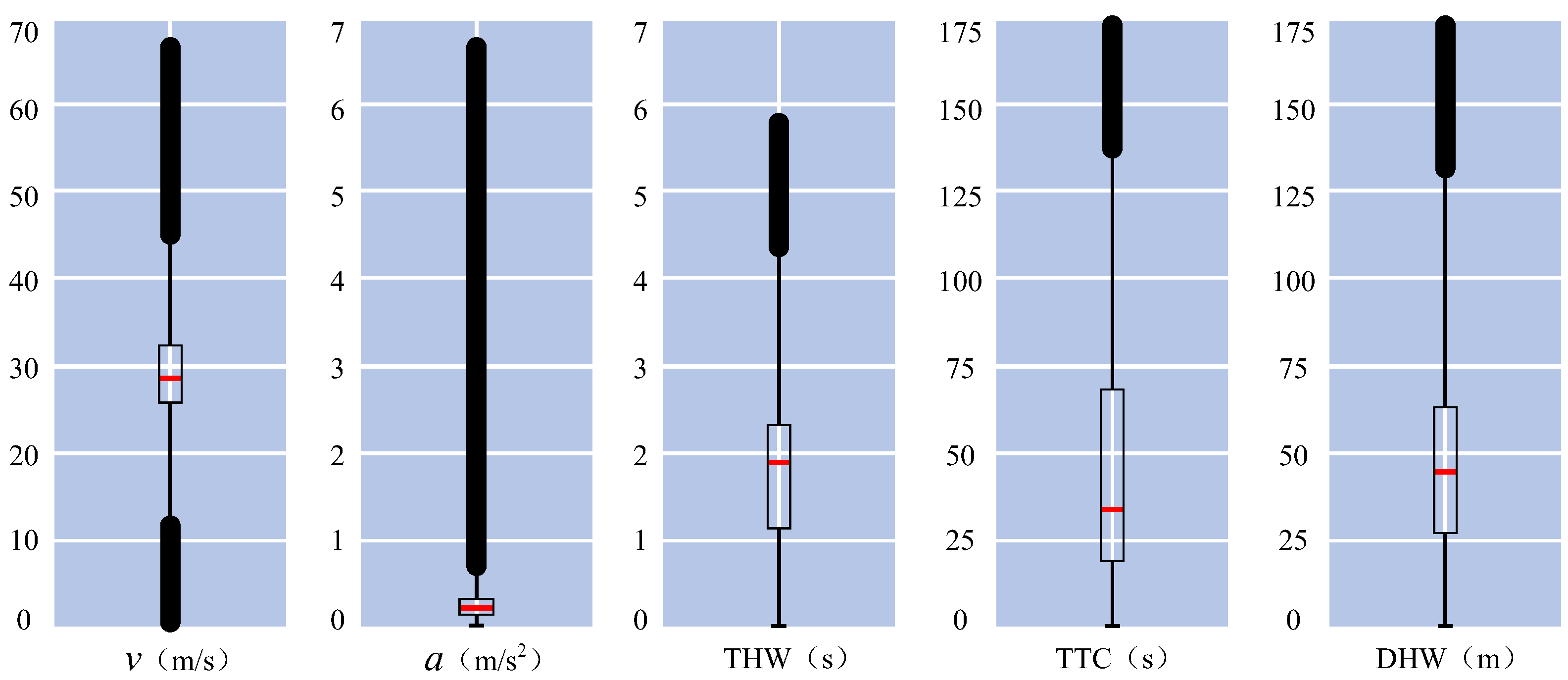
2.2. Selection of Indicators
3. Risk Analysis and Modeling Based on Security Potential Field
3.1. Security Potential Field Modeling
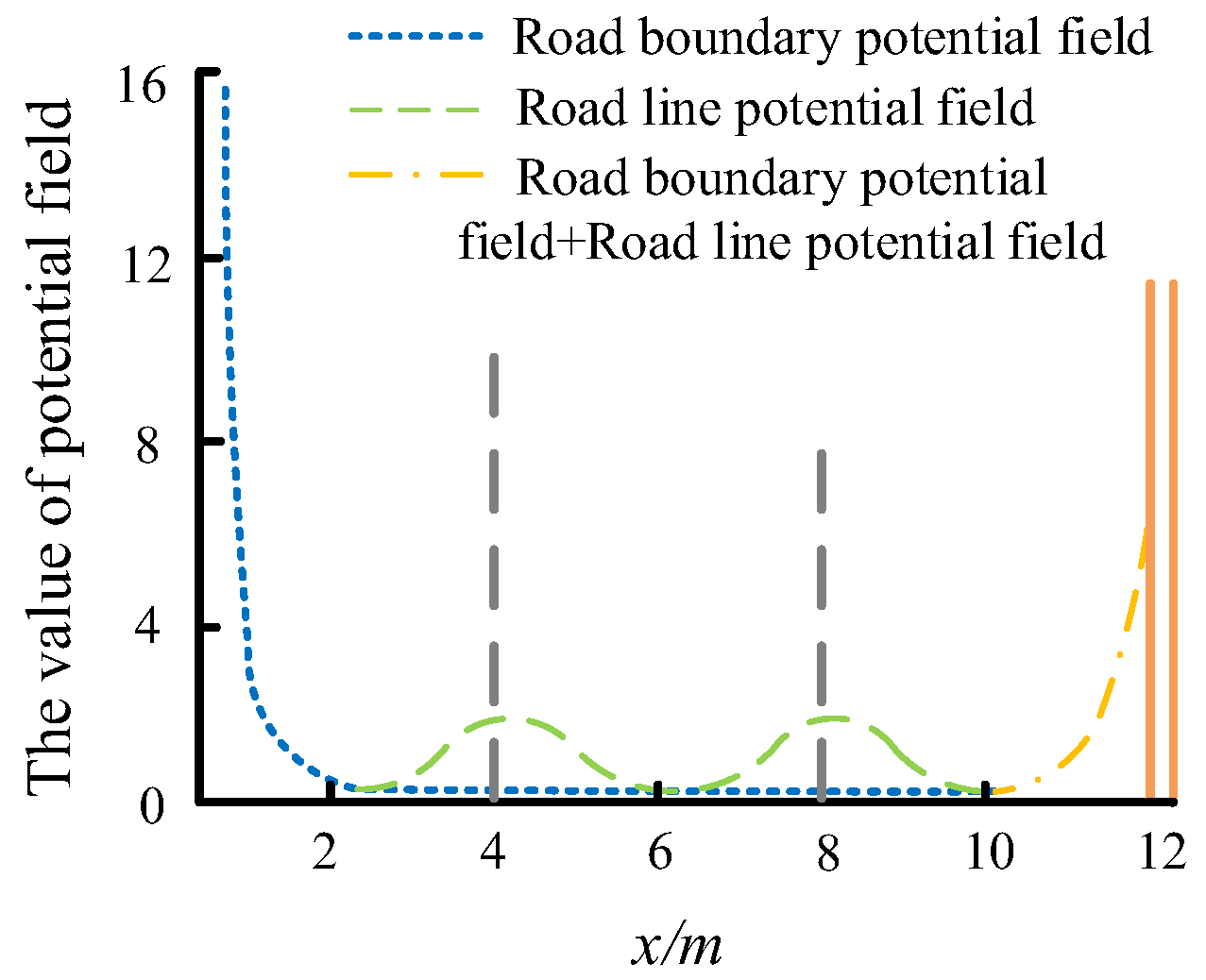
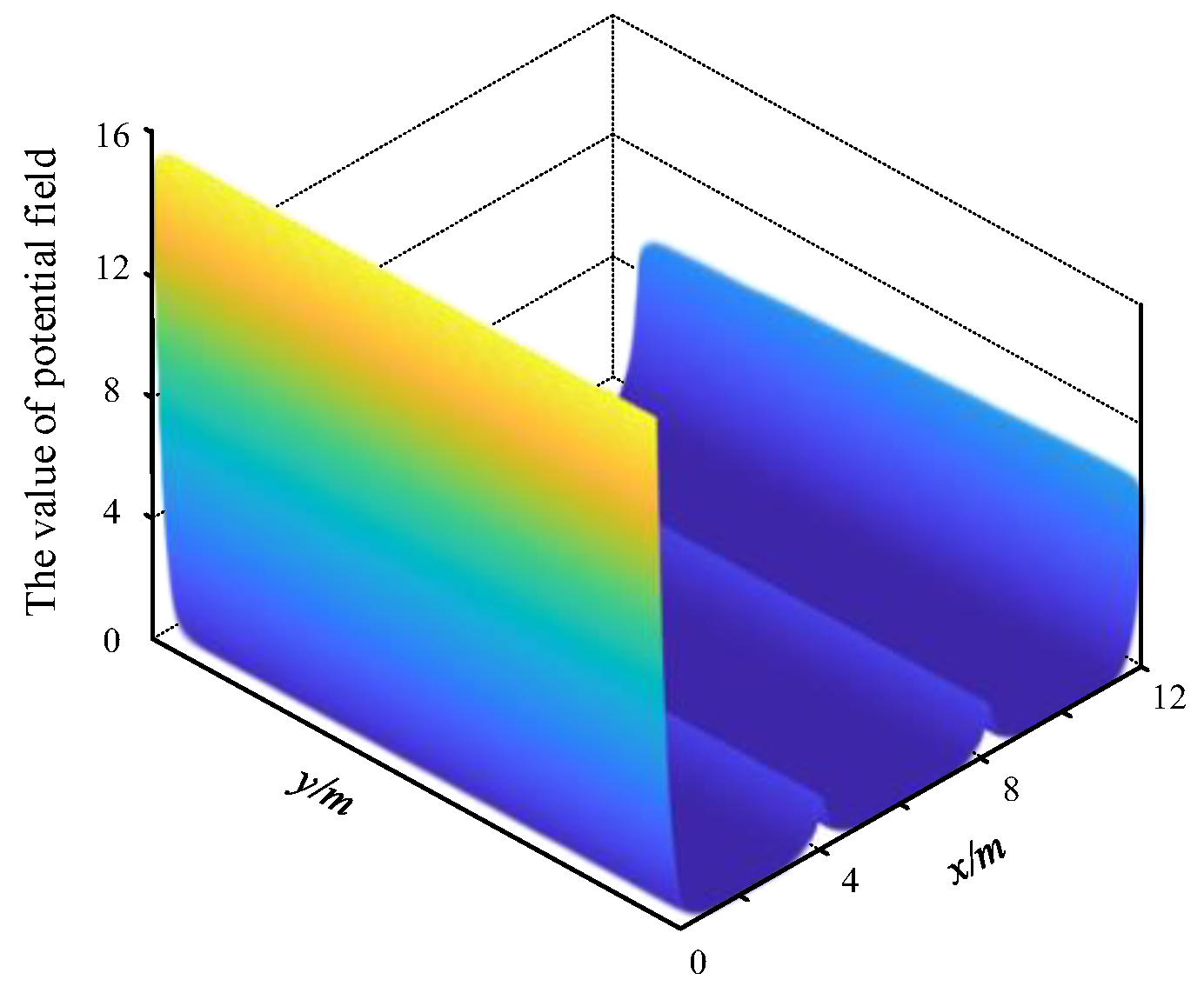
3.1.1. Road Line Potential Field
3.1.2. Road Boundary Potential Field
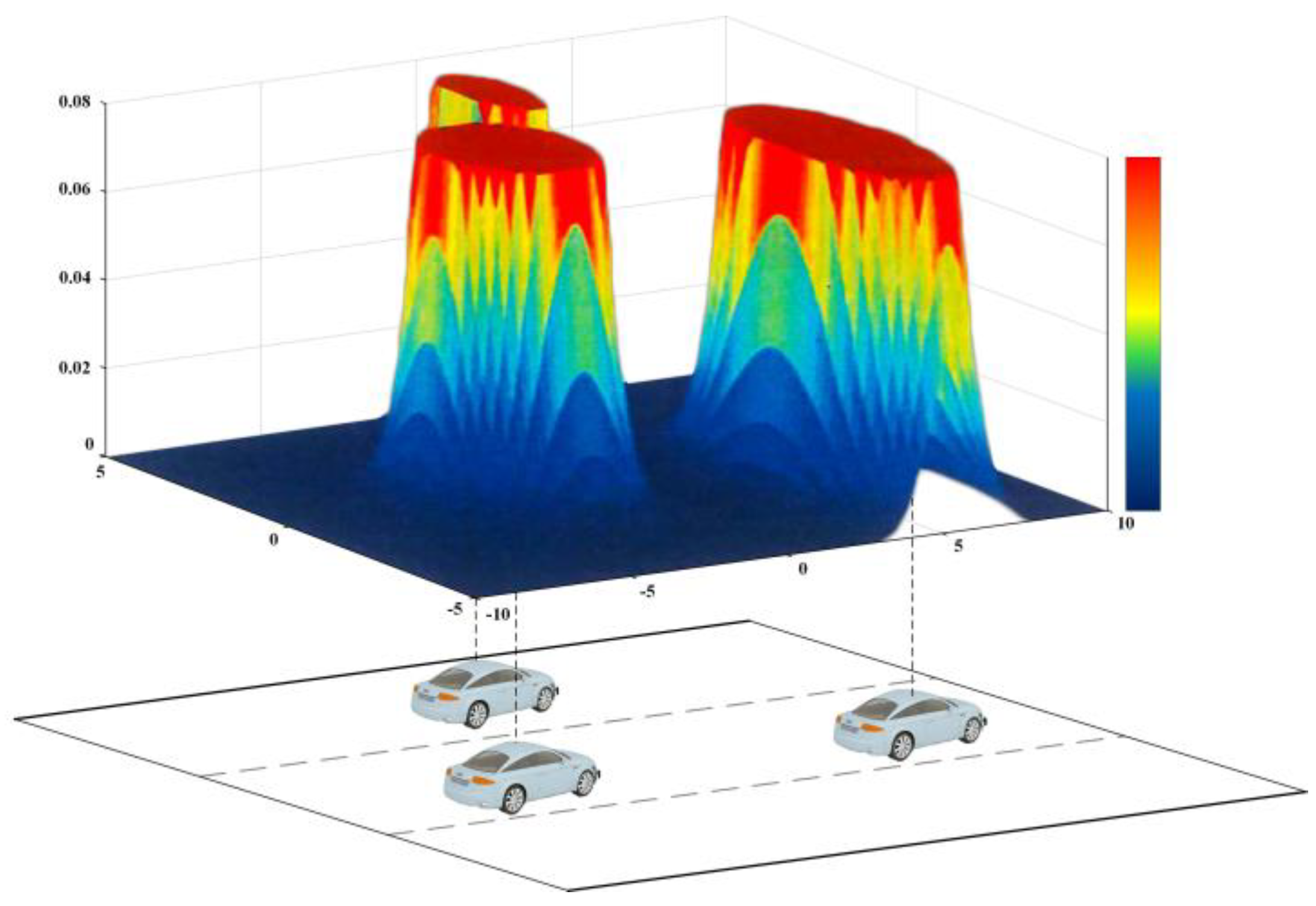
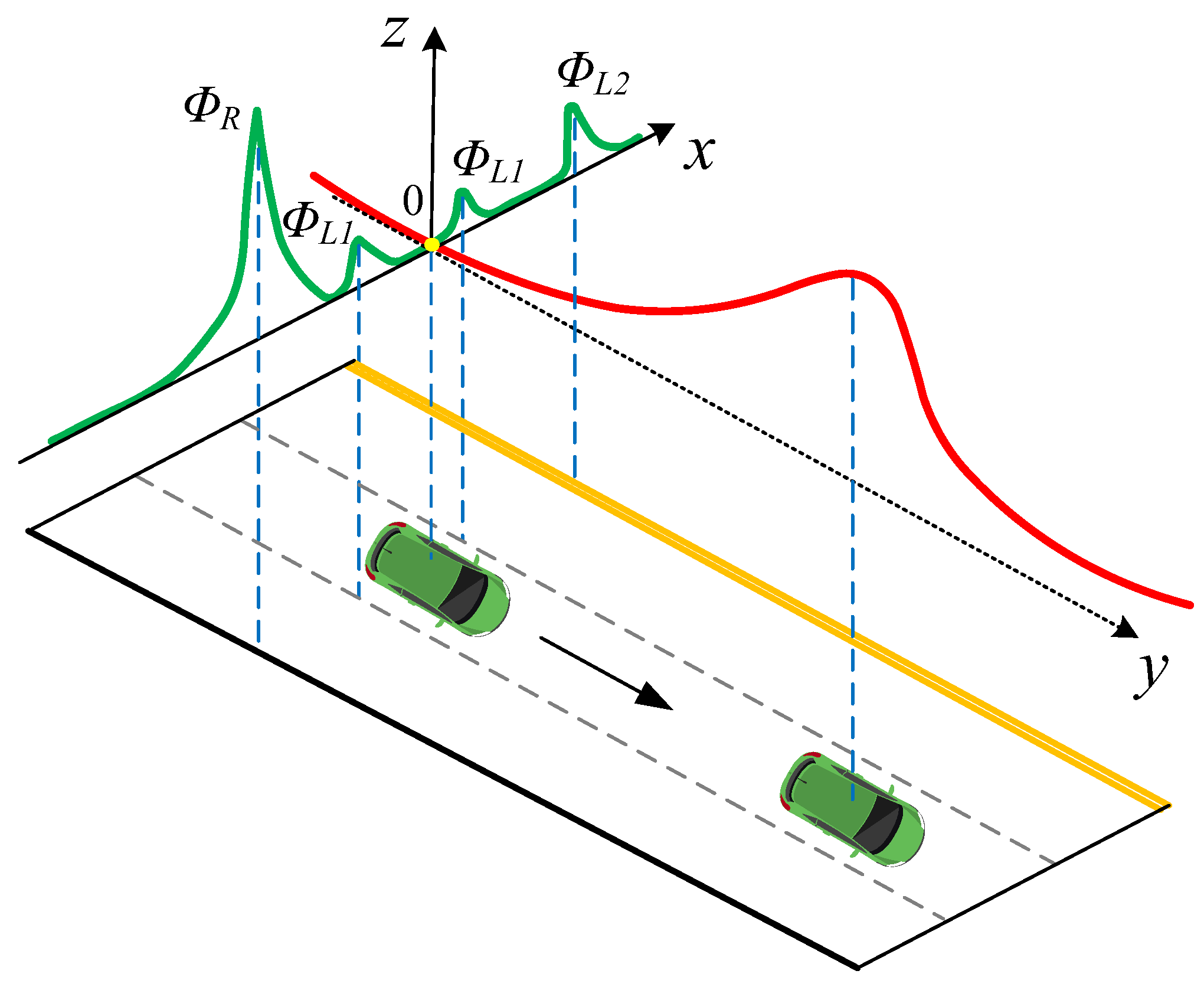
3.1.3. Vehicle-Actuated Potential Field
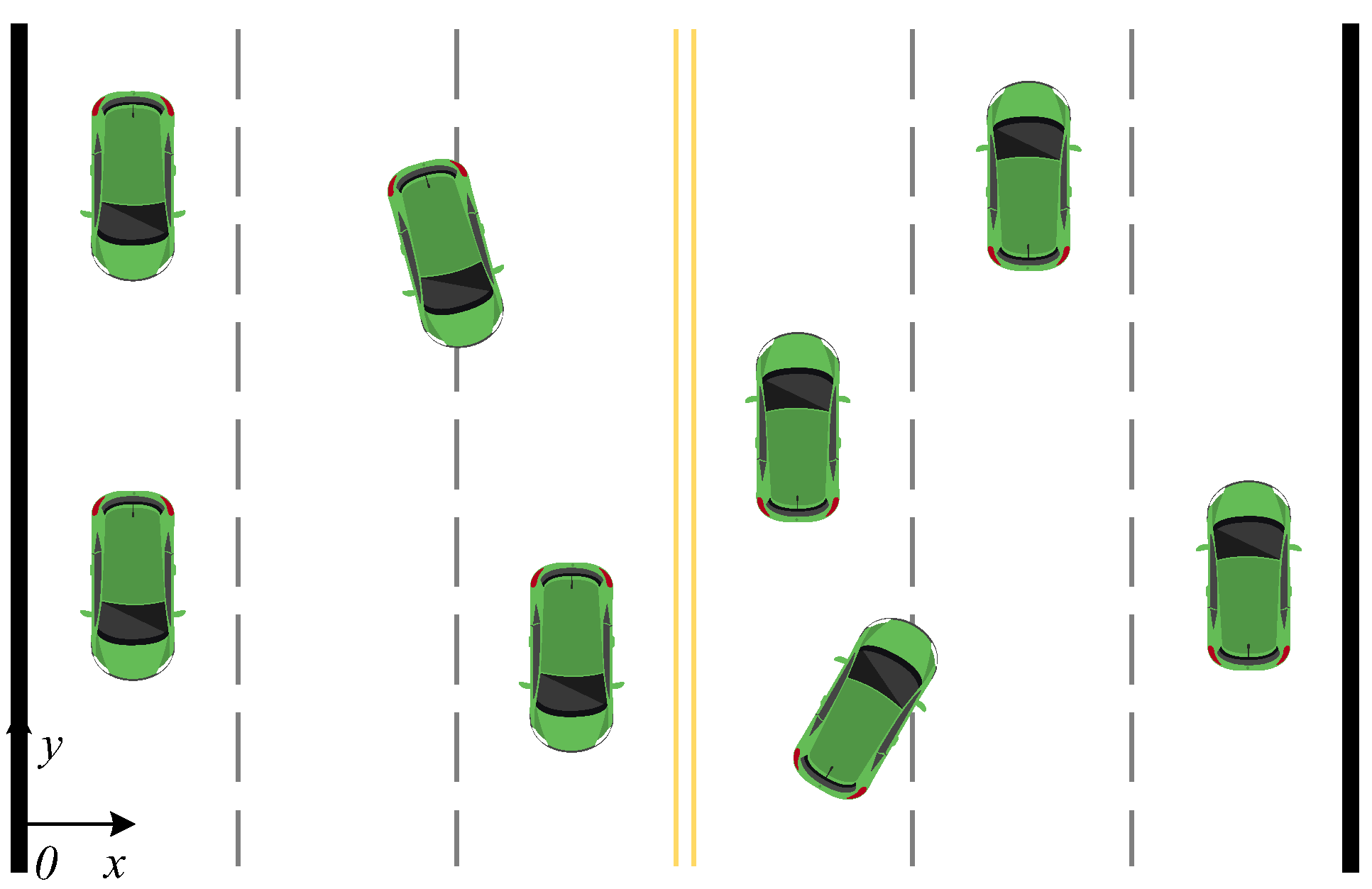
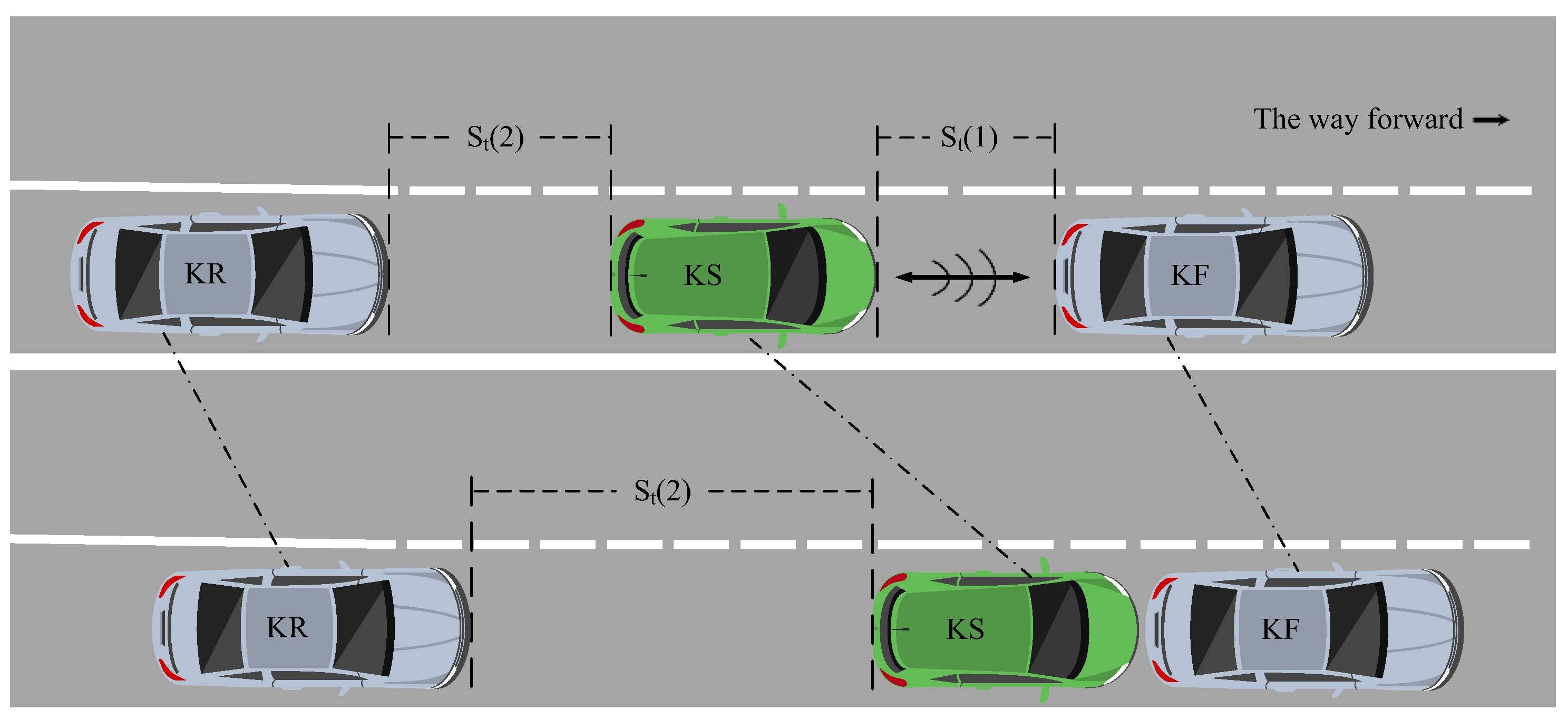
3.2. Safety Potential Field Following Spatial Model
4. Risk Quantification and Behavioral Modeling
4.1. Stop Distance Index
4.2. Real-Time Risk Exposure Level
4.3. Real-Time Risk Severity Level
4.4. Car-Following Risk Index Considering Driving Style Propensity
5. Experimental Analysis
5.1. Data Processing
- (1)
- The lane number of the following vehicle remained constant throughout the detection section to ensure that the extracted vehicle did not change lanes.
- (2)
- The duration of the follow-through event was determined to be 5 s according to international standards [23].
5.2. Risk Level Classification
5.3. LightGBM-Based Risk Prediction for Car Following
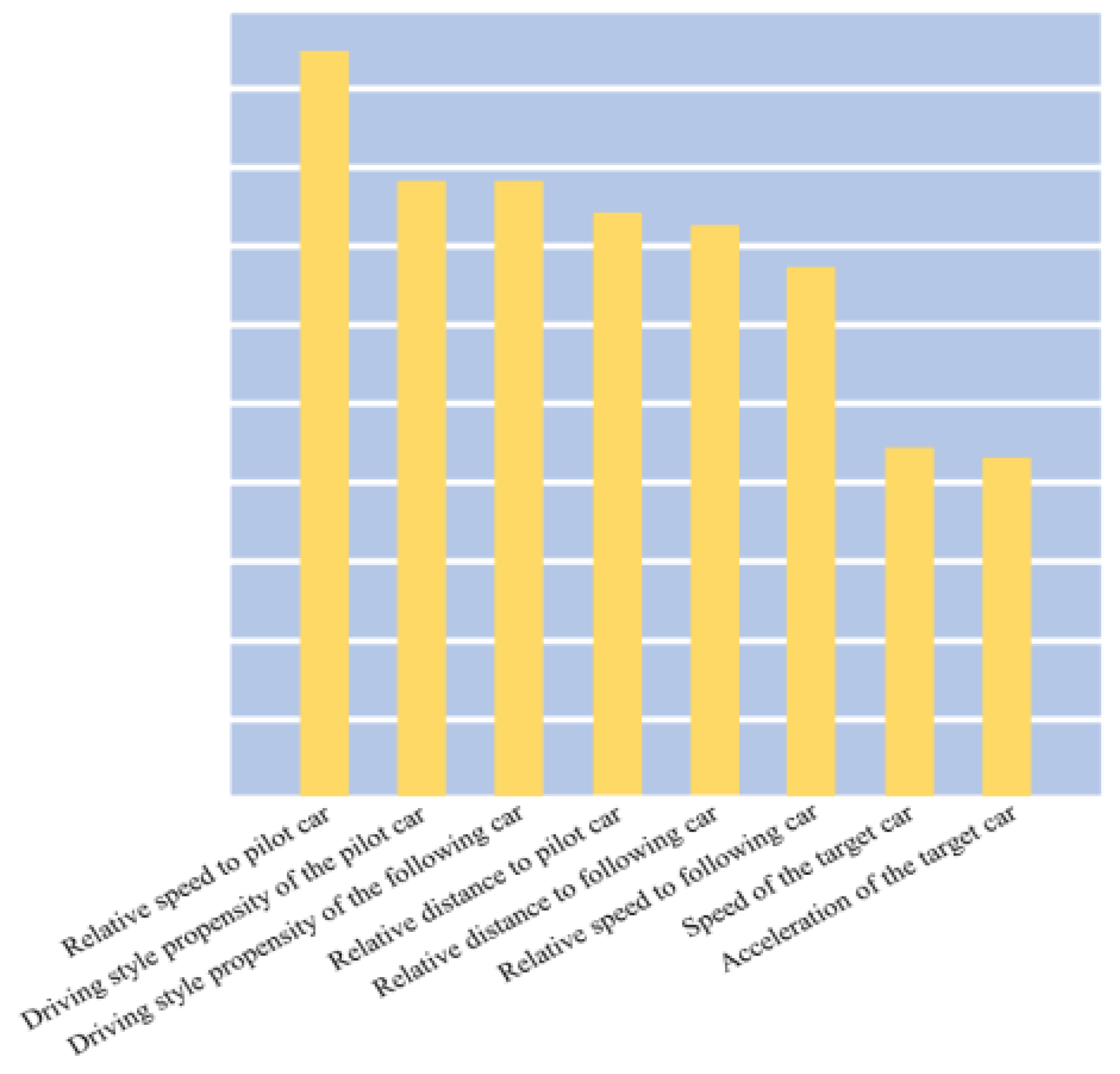
5.3.1. Selection of Characteristic Indicators
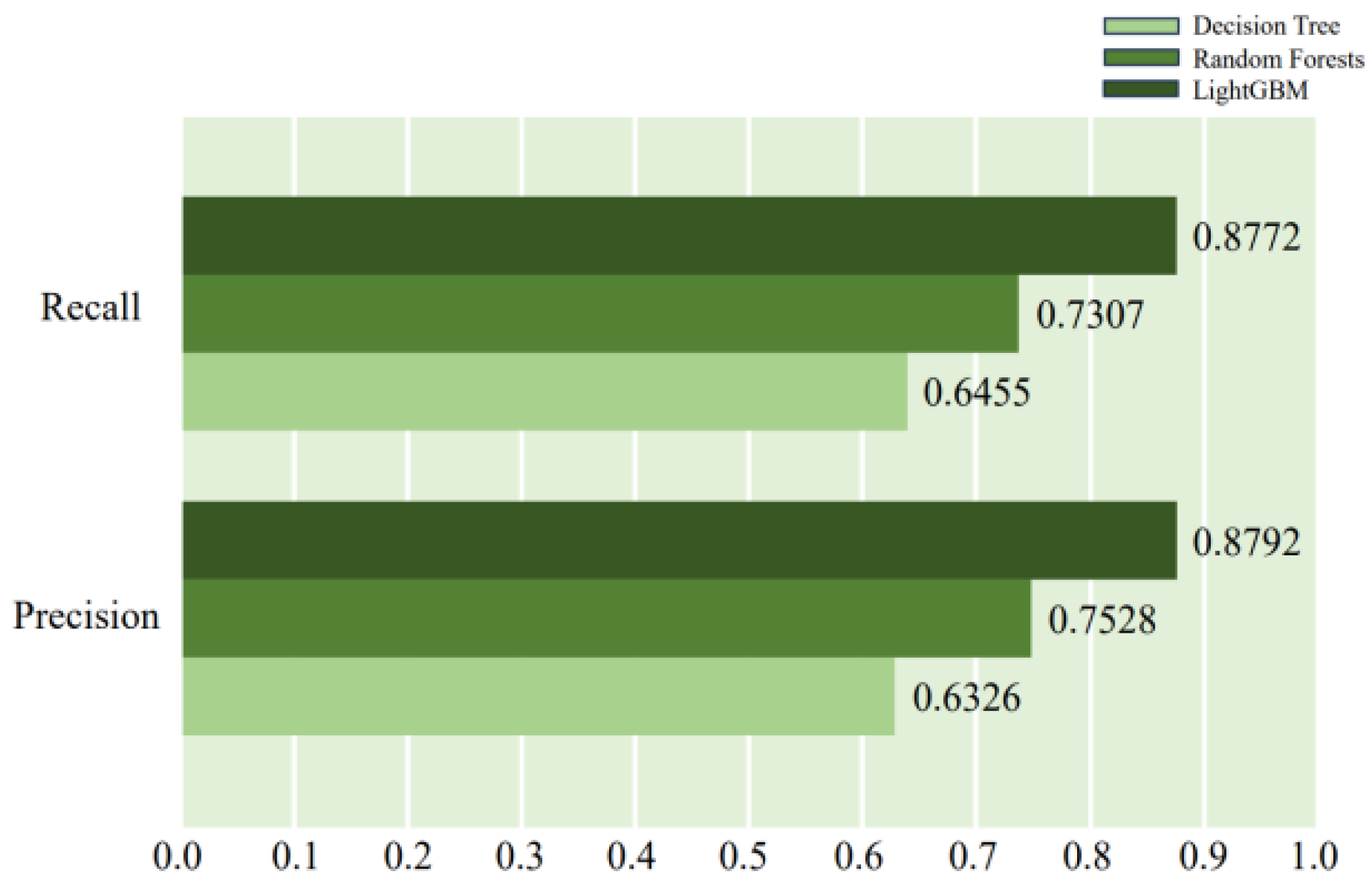
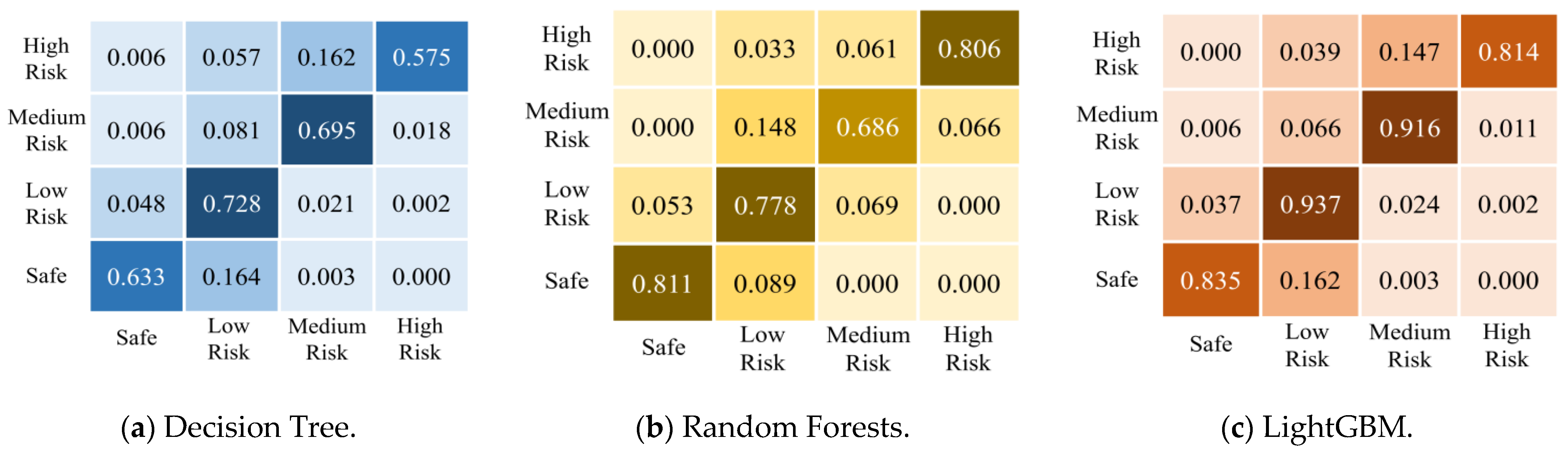
5.3.2. Analysis of Risk Prediction Results
6. Conclusions
- (1)
- Potential field theory is applied to the traffic system, analogous to establishing the vehicle interaction potential field function based on intermolecular interactions. This approach led to the development of a safe potential field car-following model that integrates lane, road boundary, and vehicle potential fields. By introducing acceleration as a variable in the vehicle potential field, its fluctuations directly influence the field’s distribution, enabling the model to reflect the safety risks encountered during driving. This provides a foundational framework for promoting safer vehicle operations.
- (2)
- Based on the driver’s continuous time series, two categories of indicators were built to extract the short-term driving style inclination during the following process of interacting vehicles in different roles. The short-term driving style inclination features were integrated into the quantification indicators of the following risk, combined with real-time risk exposure and real-time risk severity. A quantification model of the following risk considering collision potential and severity, as well as the additional collision probability of the surrounding vehicle drivers’ driving style inclination, is established. According to fuzzy c-means clustering, the threshold for risk level division is determined by dividing the following risk into four levels: safe, low risk, medium risk, and high risk.
- (3)
- Leveraging highD dataset insights and focusing on the interaction risks with surrounding vehicles, the LightGBM algorithm was applied for real-time prediction of follow-through vehicle risk. Achieving a recognition accuracy of over 86% for medium to high–risk identifications, this application facilitates the scientific quantification of behavioral risks in the following scenarios, taking into account driving style propensities. The outcomes offer nuanced guidance for enhancing follow-warning systems and the overall efficacy of vehicle driving-assistance technologies.
- (4)
- The exploration of risks associated with vehicle following is a burgeoning area of interest, dealing with multi-vehicle interactions within complex driving contexts. This study provides a comparative and systematic assessment of follow-through risks by modeling behaviors within a safety potential field, acknowledging driver diversity, and developing risk indicators. Utilizing the highD dataset, the research faced limitations due to the specific conditions under which data were collected—weekday hours from 8 am to 7 pm, in clear and calm weather. While this study accounts for the behavior of both the ego vehicle and its surroundings, external factors like weather and road types also play a crucial role in driving behavior, marking areas for future enhancement. Future research aims to employ a more comprehensive dataset enriched with environmental details and extended observation periods for a deeper analysis.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Elander, J.; West, R.; French, D. Behavioral correlates of individual differences in road-traffic crash risk: An examination method and findings. Psychol. Bull. 1993, 113, 279. [Google Scholar] [CrossRef] [PubMed]
- Reason, J.; Manstead, A.; Stradling, S.; Baxter, J.; Campbell, K. Errors and violations on the roads: A real distinction? Ergonomics 1990, 33, 1315–1332. [Google Scholar] [CrossRef] [PubMed]
- Ishibashi, M.; Okuwa, M.; Doi, S.; Akamatsu, M. Indices for characterizing driving style and their relevance to car following behavior. In Proceedings of the SICE Annual Conference, Takamatsu, Japan, 17–20 September 2007; IEEE: New York, NY, USA, 2007; pp. 1132–1137. [Google Scholar]
- Taubman-BEN-Ari, O.; Mikulincer, M.; Gillath, O. The multidimensional driving style incentory—Scale construct and validation. Accid. Anal. Prev. 2004, 36, 323–332. [Google Scholar] [CrossRef] [PubMed]
- Cheng, F.; Gao, W.; Jia, S. Research on Driving Style Recognition of Autonomous Vehicles Based on ACO-BP. Appl. Sci. 2023, 13, 12367. [Google Scholar] [CrossRef]
- Murphey, Y.L.; Milton, R.; Kiliaris, L. Driver’s style classification using jerk analysis. In Proceedings of the 2009 IEEE Workshop on Computational Intelligence in Vehicles and Vehicular Systems, Nashville, TN, USA, 30 March–2 April 2009; IEEE: New York, NY, USA, 2009; pp. 23–28. [Google Scholar]
- Hei, K. Research on Vehicle Interactive Behavior Characteristics and Models Based on Driving Style; Qingdao University of Technology: Qingdao, China, 2021. [Google Scholar]
- Byrne, S.; Naeem, W.; Ferguson, S. Improved APF strategies for Dual-arm local motion planning. Trans. Inst. Meas. Control 2015, 37, 73–90. [Google Scholar] [CrossRef]
- Wolf, M.T.; Burdick, J.W. Artificial potential functions for highway driving with collision avoidance. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; IEEE: New York, NY, USA, 2008; pp. 3731–3736. [Google Scholar]
- Wang, J.; Wu, J.; Zheng, X. Driving safety field theory modeling and its application in pre-collision warning system. Transp. Res. Part C Emerg. Technol. 2016, 72, 306–324. [Google Scholar] [CrossRef]
- Qu, D.-Y.; Li, J.; Liu, C.; Liu, D.-M. Dynamic characteristics model of traffic flow based on molecular dynamics. J. Transp. Syst. Eng. Inf. Technol. 2017, 17, 188–194. [Google Scholar]
- Liu, T.; Fu, R.; Ma, Y.; Liu, Z.F.; Cheng, W.D. Car-following warning rules considering driving styles. China J. Highw. Transp. 2020, 33, 170–180. [Google Scholar]
- Ji, X.F.; Xie, S.K.; Qin, W.W.; Yang, W.C.; Hu, C.Y. Dynamic prediction of traffic accident risk in risky curve sections based on vehicle trajectory data. China J. Highw. Transp. 2022, 35, 277–285. [Google Scholar]
- Wang, J.X. Intelligent Vehicle Collision Risk Assessment Based on Surrounding Vehicle Motion Prediction; Chongqing Jiaotong University: Chongqing, China, 2020. [Google Scholar]
- Zhao, S.S. Research on Short-Time Driving Style Evaluation Method Based on Driving Proneness; Jilin University: Changchun, China, 2021. [Google Scholar]
- Vasile, L.; Seitz, B.; Staab, V.; Liebherr, M.; Däsch, C.; Schramm, D. Influences of Personal Driving Styles and Experienced System Characteristics on Driving Style Preferences in Automated Driving. Appl. Sci. 2023, 13, 8855. [Google Scholar] [CrossRef]
- Li, L.; Gan, J.; Ji, X.; Qu, X.; Ran, B. Dynamic driving risk potential field model under the connected and automated vehicles environment and its application in car-following modeling. IEEE Trans. Intell. Transp. Syst. 2020, 23, 122–141. [Google Scholar] [CrossRef]
- Jia, Y.F.; Qu, D.Y.; Zhao, Z.X.; Wang, T.; Song, H. Car-following Decision-making and Model for Connected and Autonomous Vehicles Based on Safety Potential Field. J. Transp. Syst. Eng. Inf. Technol. 2022, 22, 85–97. [Google Scholar]
- Yu, C.; Feng, Y.; Liu, H.X.; Ma, W.; Yang, X. Integrated optimization of traffic signals and vehicle trajectories at isolated urban intersections. Transp. Res. Part B Methodol. 2018, 112, 89–112. [Google Scholar] [CrossRef]
- Chen, Q.; Gu, R.; Huang, H.; Lee, J.; Zhai, X.; Li, Y. Using vehicular trajectory data to explore risky factors and unobserved heterogeneity during lane-changing. Accid. Anal. Prev. 2020, 151, 105871. [Google Scholar] [CrossRef] [PubMed]
- Park, H.; Oh, C.; Moon, J. Real-Time Estimation of Lane Change Risks Based on the Analysis of Individual Vehicle Interactions. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 39–50. [Google Scholar] [CrossRef]
- Bagdadi, O. Estimation of the severity of safety critical events. Accid. Anal. Prev. 2013, 50, 167–174. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.Q.; Weng, C.B.; Lan, F.C. Potential conflict analysis and risk quantification method of intelligent vehicle lane change. Automot. Eng. 2021, 43, 1565–1576+1586. [Google Scholar]
- Tijerina, L.; Garrott, W.R.; Stoltzfus, D.; Parmer, E. Eye glance behavior of van and passenger car drivers during lane change decision phase. Transp. Res. Rec. 2005, 1937, 37–43. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Speed (m/s) | Acceleration (m/s2) | Headway (s) | Crash Time (s) | Headspace (m) |
|---|---|---|---|---|---|
| Mean | 28.0427 | 0.2356 | 1.9048 | 48.7392 | 52.5850 |
| Variance | 47.2258 | 0.0577 | 1.4839 | 1590.8703 | 1329.2565 |
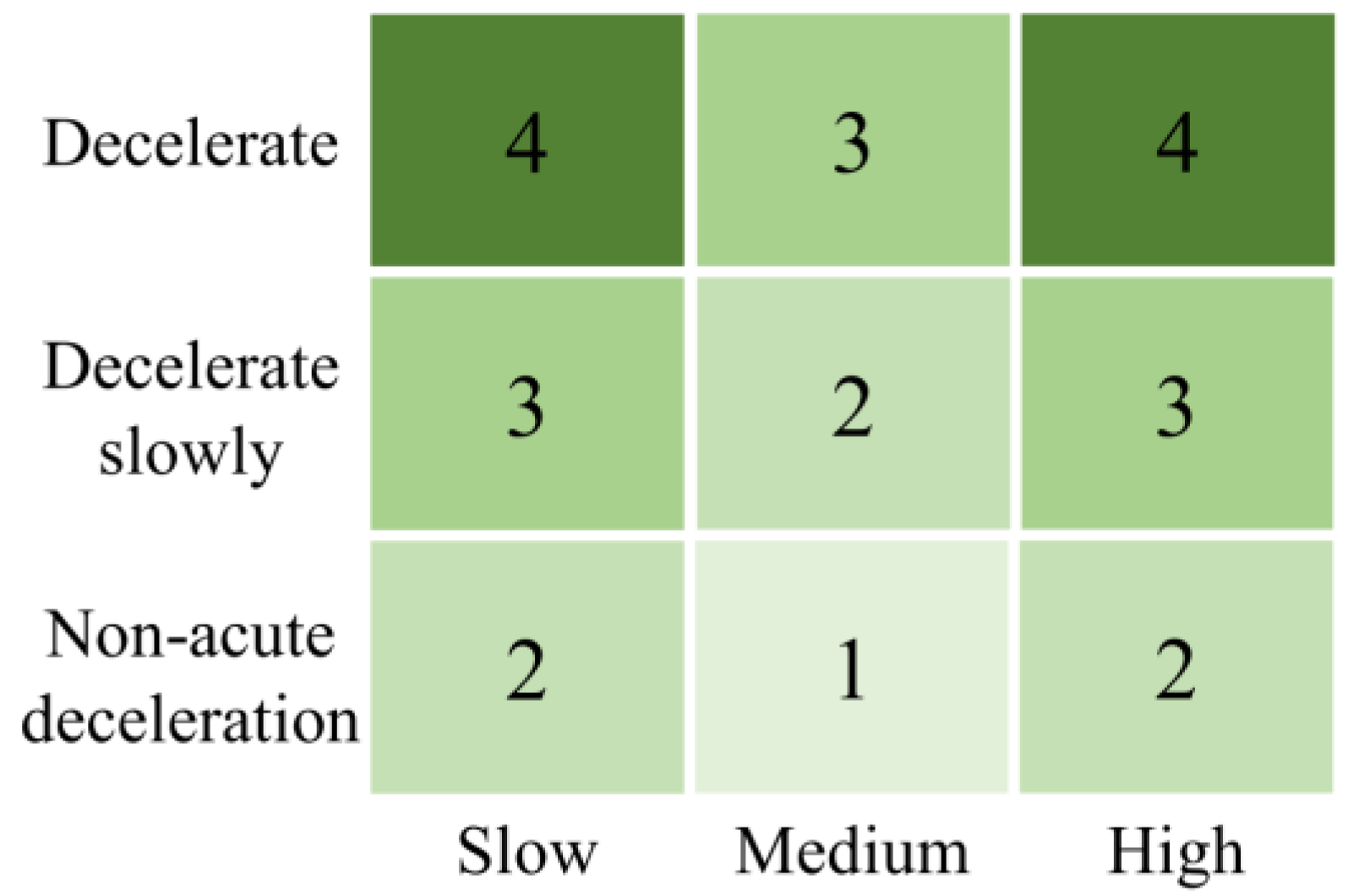
| Characterization | Statuses | Thresholds |
|---|---|---|
| Speed (m/s) | Slow | <=24.72 |
| Medium | (24.72, 36.53] | |
| High | >36.53 | |
| Acceleration (m/s2) | Decelerate | <=−0.13 |
| Decelerate slowly | (−0.13, 0.00] | |
| Non-acute deceleration | >0.00 |
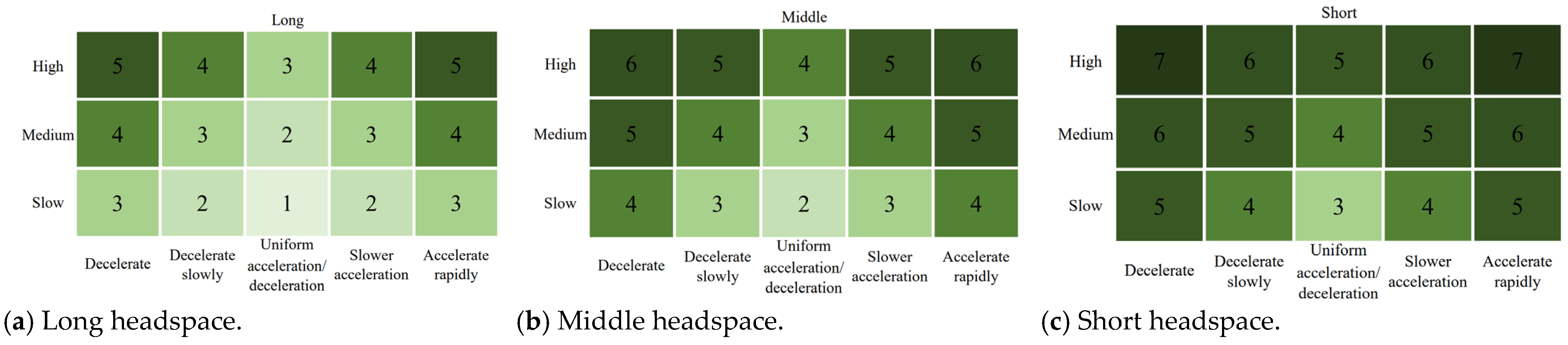
| Characterization | Statuses | Thresholds |
|---|---|---|
| Speed (m/s) | Slow | <=23.09 |
| Medium | (23.09, 34.08] | |
| High | >34.08 | |
| Acceleration (m/s2) | Decelerate | <=−0.13 |
| Decelerate slowly | (−0.13, −0.02] | |
| Uniform acceleration/ deceleration | (−0.02, 0.06] | |
| Slower acceleration | (0.06, 0.17] | |
| Accelerate rapidly | >0.17 | |
| Headspace (m) | Short | <=28.91 |
| Middle | (28.91, 79.46] | |
| Long | >79.46 |
| Classification | Thresholds |
|---|---|
| High Risk (IV) | CFR > 0.8569 |
| Medium Risk (III) | 0.6741 < CFR ≤ 0.8569 |
| Low risk (II) | 0.4635 < CFR ≤ 0.6741 |
| Safe (I) | CFR < 0.4635 |
| Category | Characteristics | Characteristic Number |
|---|---|---|
| Characteristics of following vehicles | Vehicle speed | 1 |
| Vehicle acceleration | 1 | |
| Characteristics of interaction with vehicles in front and behind | Relative longitudinal distance between the following vehicle and the vehicle in front of and behind it | 2 |
| Longitudinal speed of the following vehicle relative to the leading and following vehicles | 2 | |
| Driving style propensity of leading and following vehicles | 2 |
| Driving Behavior | Risk Level | Precision | Recall | F1-Score |
|---|---|---|---|---|
| Car Follow | High Risk | 0.93 | 0.81 | 0.86 |
| Medium Risk | 0.92 | 0.92 | 0.91 | |
| Low Risk | 0.88 | 0.94 | 0.90 | |
| Safe | 0.92 | 0.84 | 0.89 | |
| Overall Performance | 0.91 | 0.88 | 0.89 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Qu, D.; Yang, Y.; Dai, S.; Wang, T. Risk-Quantification Method for Car-Following Behavior Considering Driving-Style Propensity. Appl. Sci. 2024, 14, 1746. https://doi.org/10.3390/app14051746
Wang K, Qu D, Yang Y, Dai S, Wang T. Risk-Quantification Method for Car-Following Behavior Considering Driving-Style Propensity. Applied Sciences. 2024; 14(5):1746. https://doi.org/10.3390/app14051746
Chicago/Turabian StyleWang, Kedong, Dayi Qu, Yufeng Yang, Shouchen Dai, and Tao Wang. 2024. "Risk-Quantification Method for Car-Following Behavior Considering Driving-Style Propensity" Applied Sciences 14, no. 5: 1746. https://doi.org/10.3390/app14051746
APA StyleWang, K., Qu, D., Yang, Y., Dai, S., & Wang, T. (2024). Risk-Quantification Method for Car-Following Behavior Considering Driving-Style Propensity. Applied Sciences, 14(5), 1746. https://doi.org/10.3390/app14051746