1. Introduction
Visible light communication (VLC) is a new type of wireless communication technology that has emerged in recent years [
1,
2]. It uses light emitting diode (LED) light sources for high-speed modulation, uses light as a carrier to transmit signals, and takes into account communication and lighting functions. It has the advantages of energy saving and environmental protection, no electromagnetic radiation, and low cost [
3,
4], which has attracted people’s attention. In addition to meeting the basic communication, the VLC system must also consider the communication rate and frequency band utilization. With the improvement of the technical level, the demand for high-speed and high-bandwidth transmission systems is gradually increasing, so it is necessary to improve the communication rate while meeting the performance requirements. At present, the indoor VLC system mostly uses on-off keying (OOK), pulse position modulation (PPM), and pulse interval modulation (PIM) [
5,
6]; the transmission efficiency of OOK is too low, and it is not suitable for a high-speed transmission system. PPM modulation has good anti-noise ability and has been used in optical communication systems for a long time. The Ke research group at the Xi’an University of Technology systematically analyzed PPM.
In recent years, high speed has been the main requirement of the current communication system, and the upper limit of communication rate can be increased by increasing the modulation order. Compared with the above three modulation methods, four-level pulse amplitude modulation (PAM4) can transmit more bit information in the same symbol; its information transmission rate per unit band is high and has higher spectral efficiency [
7]. Under the same communication rate conditions, PAM4 can also reduce inter-symbol interference, thereby reducing the bit error rate (BER) [
8] and making full use of frequency band resources. Research in the field of communication has achieved results. In 2016, Zuo used equalization technology implementation of PAM4 signal transmission in 100 m fiber at a transmission rate of 155 Gb/s [
9]. In 2017, Laverencik realized the transmission of laser light in optical fiber at high speed and used PAM4 as the modulation method, and the BER was less than 10
−12 [
10]. In 2019, Yu used PAM4 as the main modulation method for the communication system and combined it with equalization technology. Through experimental verification, a high-speed transmission system based on PAM4 was finally realized [
11]. In 2020, Guo designed a dual-mode 32 Gb/s receiver that can simultaneously operate in NRZ and PAM4 modes [
12]. In 2021, Wei used the DSP development board to design a VLC system based on PAM4 through the combination of software and hardware. The author successfully completed the communication verification experiment, and the BER met the communication system requirements [
13]. The research on PAM4 at home and abroad is mainly developing rapidly in the direction of high speed and high bandwidth, and most of them are used in the field of optical fiber communication. There are relatively few studies on the use of PAM4 technology in indoor VLC. Therefore, the study of the encoding and decoding of the PAM4 signal in indoor VLC systems has certain significance and application value.
This paper focuses on the design scheme of the key parts of the system and studies and analyzes the BER performance of the PAM4 signal under different channel noise models. The results show that the BER performance of the PAM4 signal depends on the variance of the noise data. The greater the variance, the worse the BER performance. The BER performance in the case of the multiplicative noise is much larger than the BER in the case of the additive noise. The main reason is that the multiplicative noise is caused by the time-varying and nonlinearity of the system, reflecting the fading of the channel, while the additive noise generally refers to the background noise of the system. The field programmable gate array (FPGA) development board with EP4CE10 FPGA chip as the core is used to verify the communication system, which verifies the feasibility of the system scheme. In addition, the system has high programmability and is easy to debug and develop with subsequent system upgrades.
2. Theoretical Basis
Most VLC systems are designed as intensity modulation/direct detection (IM/DD) systems. OOK is the easiest modulation method to implement in an IM/DD system, but the transmission efficiency of OOK is too low [
14], while PAM4 can transmit 2 bits of information per waveform, effectively improving the communication rate and modulation efficiency, which can meet the requirements of high transmission efficiency. Under the same transmission rate, the bandwidth utilization of PAM4 is higher than that of OOK, PPM, and DPPM.
Table 1 shows the bandwidth requirements of four modulation methods [
15], where R
b refers to the transmission rate, and M refers to the modulation order. As can be seen from
Table 1, in the case of the same transmission rate, PPM requires the largest bandwidth, followed by DPPM, and PAM requires the smallest bandwidth. Therefore, the bandwidth utilization rate of PAM is higher than that of the other three methods, with higher spectral efficiency, and the data transmission rate is the highest under the same bandwidth requirements. As the order M of PAM increases, the bandwidth utilization rate and data transmission rate will also increase, but the anti-noise performance of the system will gradually deteriorate, and the required hardware will also increase its complexity [
16,
17,
18].
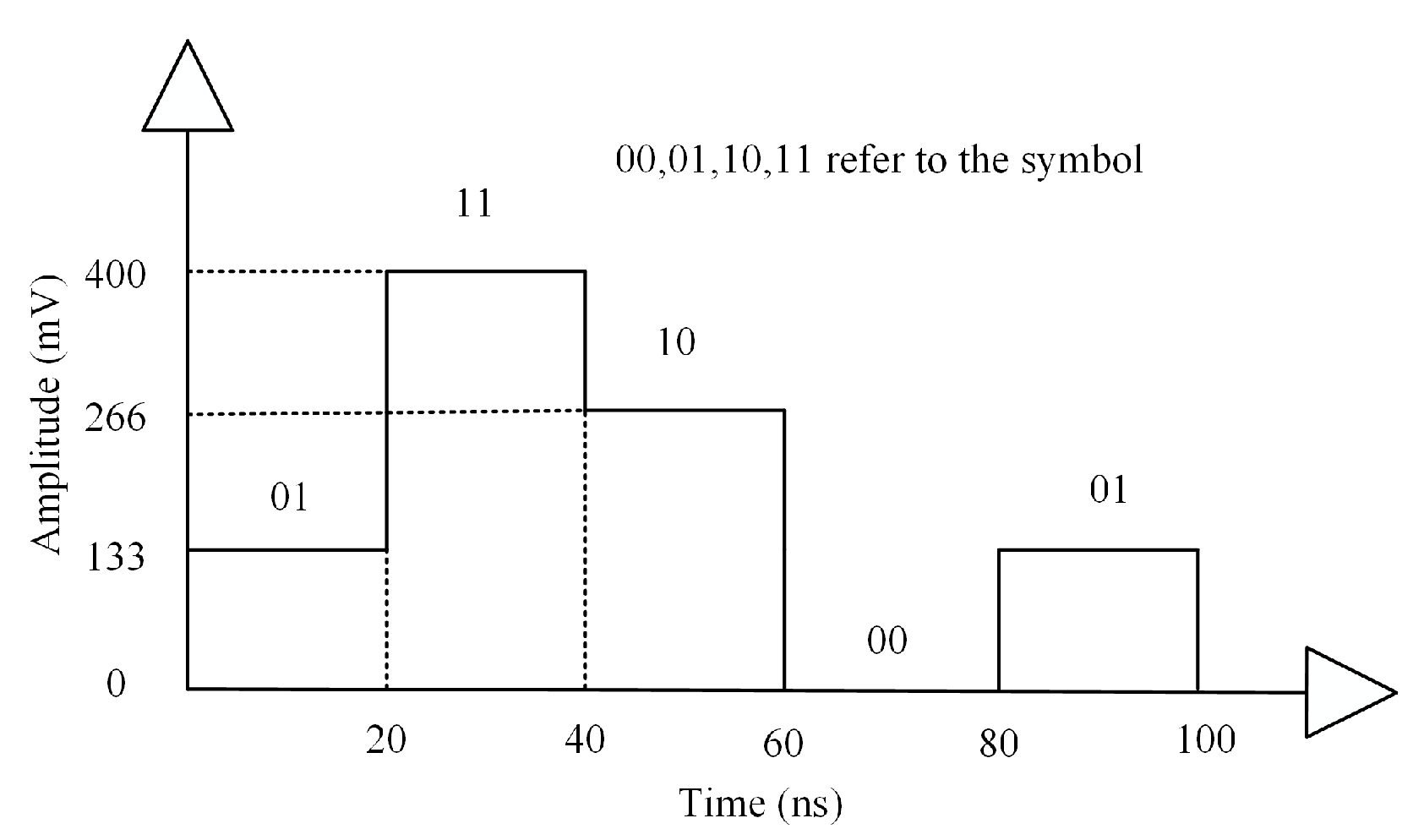
PAM4 uses periodic pulses as the carrier, and the symbol information of the source controls the amplitude of the pulse. The waveform diagram of the PAM4 signal is shown in
Figure 1, and four different amplitudes control different symbol information.
For the PAM4 signal, its waveform is expressed as [
19]:
where
T is the pulse duration, which is called the symbol interval,
t is the time,
p(
t) is the rectangular pulse with duration
T, and
Am is the amplitude of the
m-th waveform, which is expressed as:
where
d is half the Euclidean distance between adjacent levels.
p(
t) is defined as:
Therefore, the energy of the pulse
p(
t) is normalized to 1. From Equation (1), it can be seen that the energy of the PAM4 signal is [
14]:
where
is the energy of the rectangular pulse
p(
t). From this, the average energy of the PAM4 signal can be obtained as:
Since the PAM4 signal only modulates the amplitude, the constellation map of the PAM4 signal only has values on the in-phase component, and the signal points are all located on the in-phase component. Therefore, the PAM4 map belongs to the one-dimensional real constellation map, and the Euclidean distance
of any pair of adjacent signal points is [
14]:
where
is the average energy of the PAM4 signal.
and
represent the energy values of any two adjacent signal points. It can be seen from Equation (6) that the Euclidean distance obtained is exactly the same as the expression of Equation (2). Since the amplitude of the PAM4 signal cannot be negative in VLC, and the amplitude of the PAM4 signal has no fixed value, it can be adjusted appropriately to meet the demand, so the amplitude after PAM4 encoding is set to 0, 1, 2, and 3.
Assuming that the transmission channel is equivalent to the AWGN channel. From the above analysis, it can be seen that the average BER
is [
19]:
where
is the probability of error at each level,
is the noise power,
SNR is the signal-to-noise ratio (SNR), and the expression of the Q function is:
Assuming that the channel noise model is a Gaussian mixture model (GMM), its conditional probability density function (PDF) is [
20]:
where
is the transmitted symbol,
is the average bit energy,
is the mean,
is the variance,
is the weight value of the GMM, then the BER is [
20]:
SNR is given by Equation (11) [
20]:
Assuming that the channel noise model is a lognormal model, if the transmitted signal energy is
, the received signal energy is
. At this time, the SNR at the receiving end becomes
. The BER can be obtained by Equation (7) [
19]:
where
h reflects the channel state and conforms to the lognormal distribution. Since
h is a random variable, there is:
where
f (
h) refers to the PDF of the lognormal distribution.
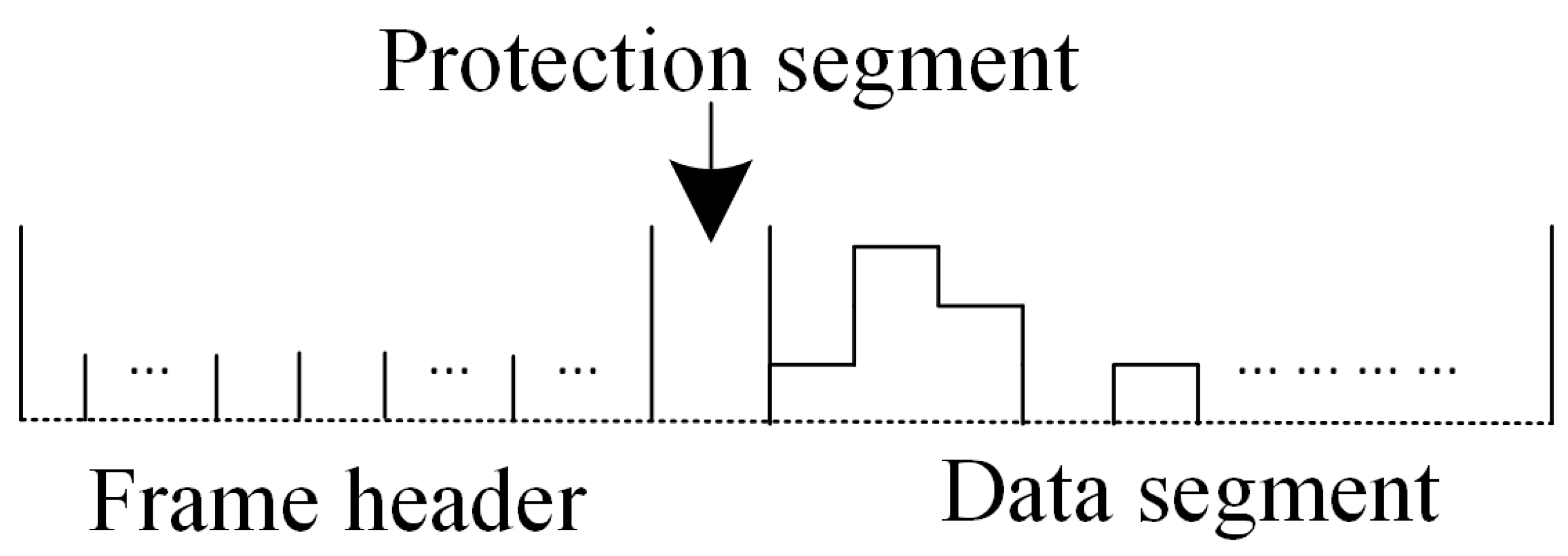
In the VLC system, the transmitting end must maintain synchronization with the receiving end [
21]. The data must be sent in the format of a frame after being encoded by PAM4. The system inserts a Barker code sequence as a frame synchronization signal at the head of the PAM4 data, thereby forming a PAM4 data frame and then sending the data out. The format of the PAM4 data frame is shown in
Figure 2. The data segment of PAM4 contains multiple sets of PAM4 data. The function of the protection segment is to provide the system with enough time to calculate the relevant parameters. In this paper, gray coding and 8b/10b coding are added before the PAM4 coding. The purpose is to minimize the error rate of symbols during transmission according to the coding rules of gray coding and 8b/10b coding. 8b/10b coding encodes 8 bits data into 10 bits data. By increasing the redundancy of information, the coding is more reliable, and the security of information transmission is improved.
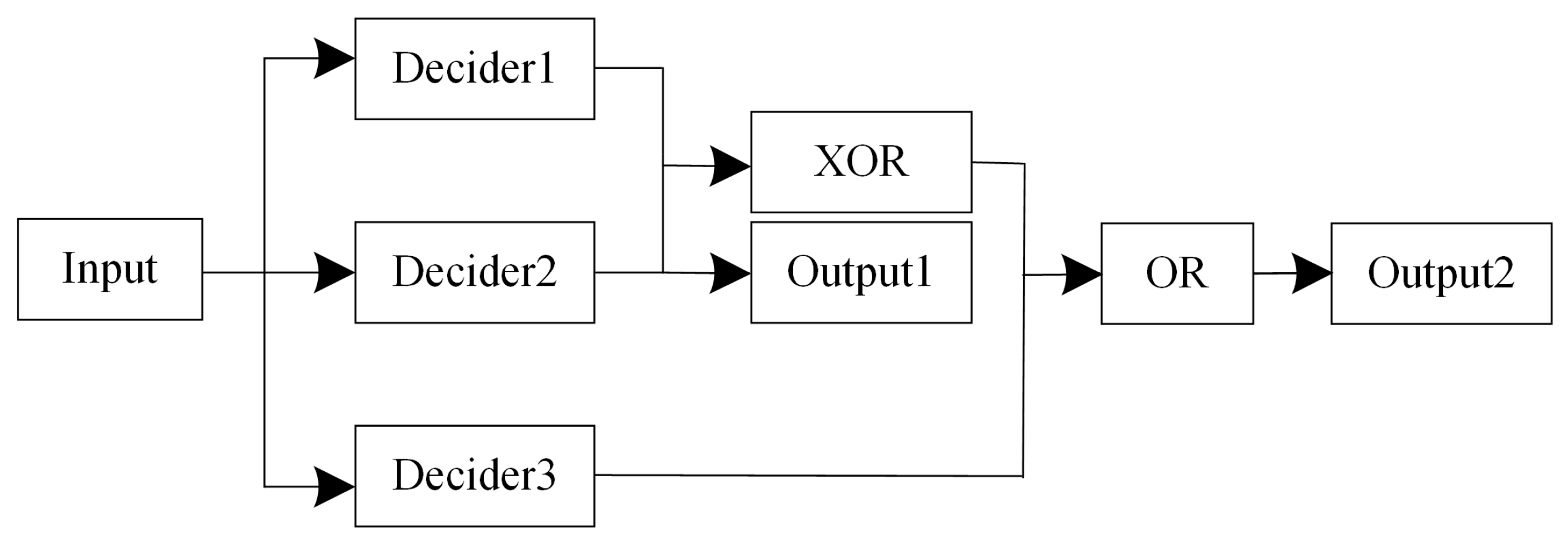
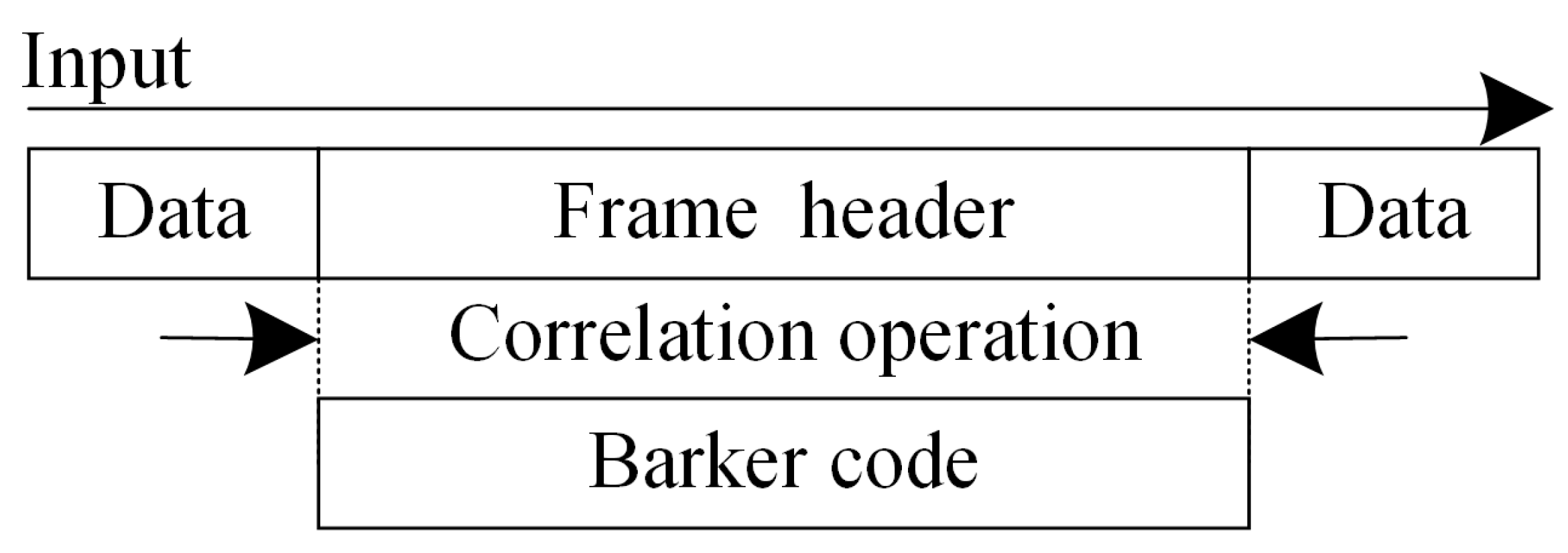
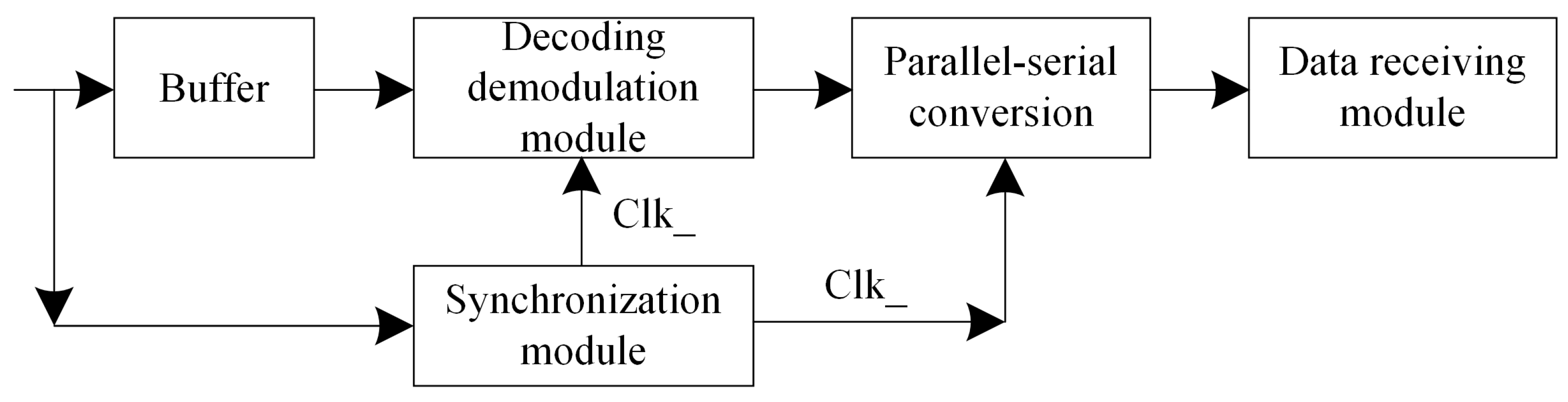
When there is data input at the receiving end, the data is first stored in the buffer, and then the data is judged. When the data is equal to the frame synchronization data, it is considered that the frame header is detected, and the data can be received. This process is called frame synchronization. Frame synchronization is realized by designing a Barker code correlator. In order to successfully decode the original data source, the clock data must be restored, which requires extracting the clock signal from the PAM4 signal to make a correct judgment on the data at the sampling time. This process of recovering the clock signal is called bit synchronization. After bit synchronization recovery using the lead-lag bit synchronization method, PAM4 decoding is performed according to the clock signal to recover the source data.
4. Modulation Characteristic Analysis
The noise sources of an intensity modulation/direct detection (IM/DD) optical communication system mainly include background optical noise, receiver noise, and light-intensity flicker noise caused by turbulence [
22]. The noise after the background light passes through the receiver can be equivalent to Gaussian noise. The dark current and thermal noise of the receiver can be regarded as a Gaussian random process, obeying the Gaussian distribution [
23]. The background optical noise and receiver noise can be regarded as additive noise. The light-intensity flicker noise caused by turbulence is much lower than the signal frequency and belongs to low-frequency multiplicative noise. Therefore, the mathematical model of the equivalent noise of the communication channel and the receiver can be expressed as [
24]:
where
x(
t) is the transmitted signal,
n(
t) is the additive white Gaussian noise,
y(
t) is the receiver output signal, the multiplicative noise
h(
t) is the channel state information, and
h(
t) obeys the lognormal distribution in the case of weak turbulence, and its PDF is [
25]:
where
ht is the channel fading coefficient, the state information of the reaction channel, and
,
is its mean and variance. According to the literature [
26],
can be expressed as [
26]:
where
is the atmospheric refractive index structure constant,
represents the wavenumber,
λ is the wavelength of light, and
l is the transmission distance. For a random noise process
N with a
K-component Gaussian mixed distribution, the PDF is defined as [
27]:
where
is the weight coefficient of the
j-th component, and
is the PDF of the Gaussian distribution. It can be seen that the Gaussian mixture model (GMM) is actually the weighted sum of
K Gaussian noise, so the GMM is still an additive noise. Since the average value of the detection output signal of the squared law of the optical field must be greater than 0, the Gaussian white noise with a mean value of 0 cannot accurately characterize the additive noise characteristics of the optical channel. Ke proposed a noise model fitted with a double Gaussian function, which we call Ke’s model [
28], whose PDF is defined as:
where
,
are the weight coefficients, ranging from 0 to 1, and
,
,
, and
are the mean and variance of the noise model.
In this section, we study and analyze the BER performance of the PAM4 encoded signal in the case of the additive noise, the multiplicative noise, and the additive multiplicative mixed noise and compare the performance.
4.1. Additive Noise
We study and analyze the additive noise data measured in Xi’an, Beijing, Kaifeng, Guangzhou, Harbin, and Changchun and obtain the additive noise parameters using the data fitting method. The parameters are shown in
Table 3,
Table 4,
Table 5,
Table 6,
Table 7 and
Table 8, where
refers to the weight value of the GMM,
μ refers to the mean value, and
σ refers to the variance.
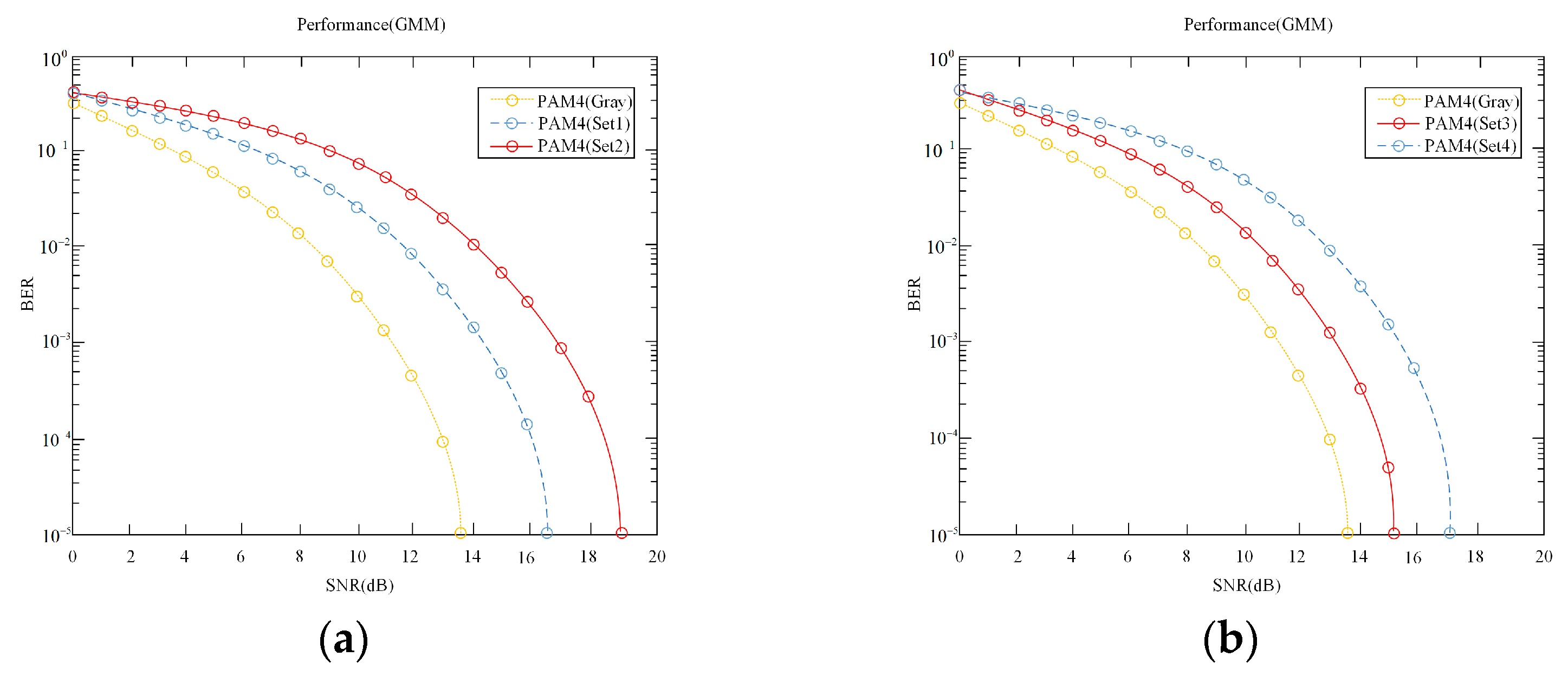
We first analyze the noise data Set 1 and Set 2 in Xi’an. Through numerical calculation and the BER and SNR formulas of Equations (10) and (11), the BER performance results of PAM4 are obtained, as shown in
Figure 10a. The yellow line in
Figure 10 is the BER performance in the case of AWGN. As can be seen from
Figure 10a, for the BER of 10
−5, using the noise data Set 1 and the noise data Set 2, PAM4 requires a SNR of 16.6 dB and 18.9 dB, respectively, while using the white Gaussian noise only needs a SNR of 13.8 dB to achieve the same BER performance. Therefore, the impact of GMM noise on the BER of PAM4 is greater than that of white Gaussian noise. For different GMM noise parameters, the performance decreases by 2.8 dB and 5.1 dB, respectively. At the same time, it can be seen from the setting of the parameters of the noise data Set 1 and the noise data Set 2. With the increase in parameters
, the BER performance deteriorated.
The BER performance of the noise data Set 3 and Set 4 in Beijing is shown in
Figure 10b, as can be seen from
Figure 10b, for the BER of 10
−5, using the noise data Set 3 and noise data Set 4, the PAM4 requires a SNR of 15.1 dB and 17.2 dB respectively, The white Gaussian noise only needs a SNR of 13.8 dB, for different GMM noise parameters, the performance decreased by 1.3 dB and 3.4 Db, respectively, comparing the noise data Set 1, Set 2 and noise data Set 3, Set 4 can be seen, the higher the value of
, the worse the BER performance, because as the value of
increases, the greater the variance of the noise data, the higher the dispersion of the noise, the greater the fluctuation, the greater the impact on the original data source, and the BER will increase under the same SNR.
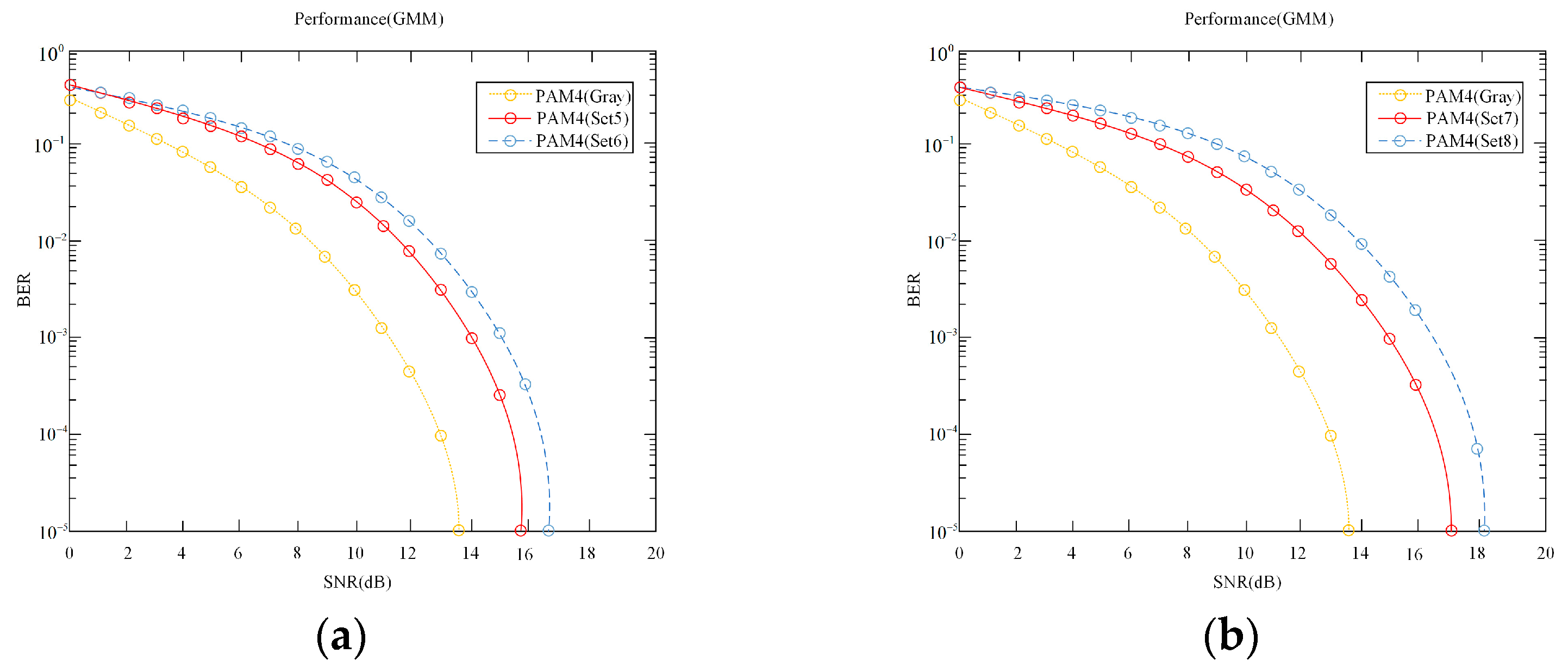
The BER performances of the noise data Set 5 and Set 6 in Kaifeng are shown in
Figure 11a. It can be seen from
Figure 11a that for the BER of 10
−5, using the noise data Set 5 and the noise data Set 6, the PAM4 requires a SNR of 15.8 dB and 16.6 dB, respectively. The white Gaussian noise only needs a SNR of 13.8 dB. For different GMM parameters, the performance decreases by 2.0 dB and 2.8 dB, respectively. The BER performance of the noise data Set 7 and Set 8 in Guangzhou is shown in
Figure 11b. It can be seen from
Figure 11b that for the BER of 10
−5, the noise data Set 7 and the noise data Set 8, the PAM4 requires a SNR of 17.2 dB and 18.1 dB, respectively. Compared with the performance of Gaussian noise, it is reduced by 3.4 dB and 4.3 dB, respectively. From the four sets of noise data in
Table 5 and
Table 6, it can be seen that the larger the value of
, the worse the BER performance.
The BER performance of Harbin’s noise data Set 9 and Set 10 is shown in
Figure 12a. It can be seen from
Figure 12a that for the BER of 10
−5, the PAM4 requires a SNR of 17.5 dB and 19.2 dB, respectively. Compared with Gaussian noise, the performance decreases by 3.7 dB and 5.4 dB. The BER performance of Changchun’s noise data Set 11 and Set 12 is shown in
Figure 12b. It can be seen that for the BER of 10
−5, using the noise data Set 11 and the noise data Set 12, PAM4 requires a SNR of 15.2 dB and 16.3 dB, respectively. Compared with the Gaussian noise, the performance decreases by 1.4 dB and 2.5 dB, respectively. It can be seen from the four sets of noise data in
Table 7 and
Table 8 that the value of Harbin’s
is large, so the BER performance is worse.
4.2. Multiplicative Noise
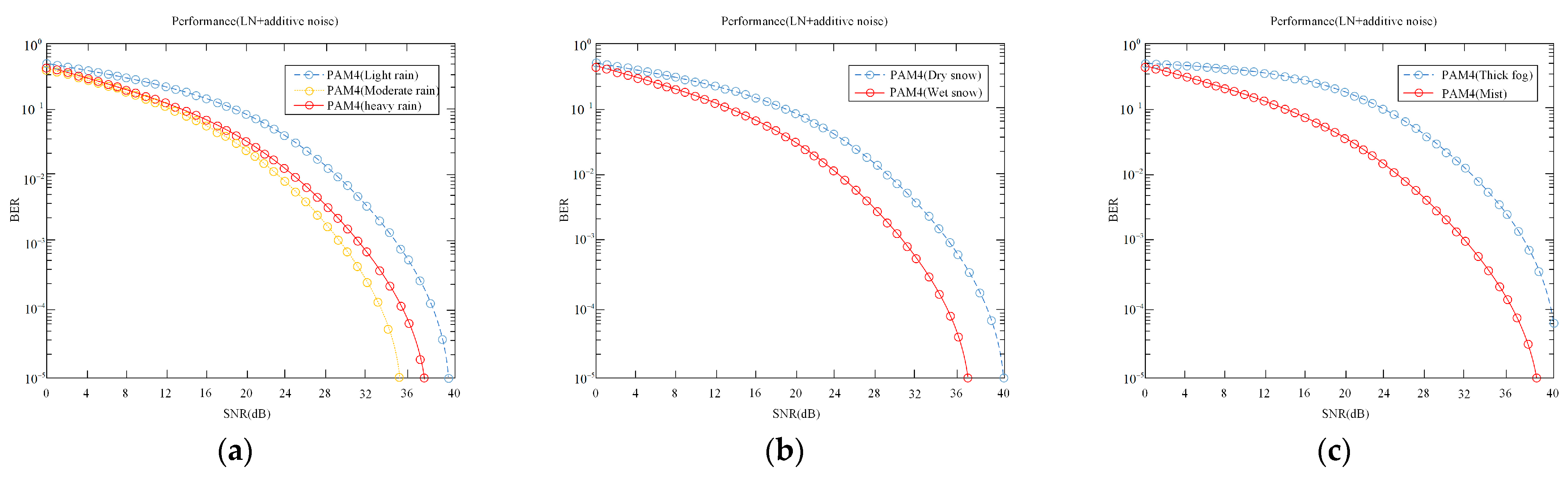
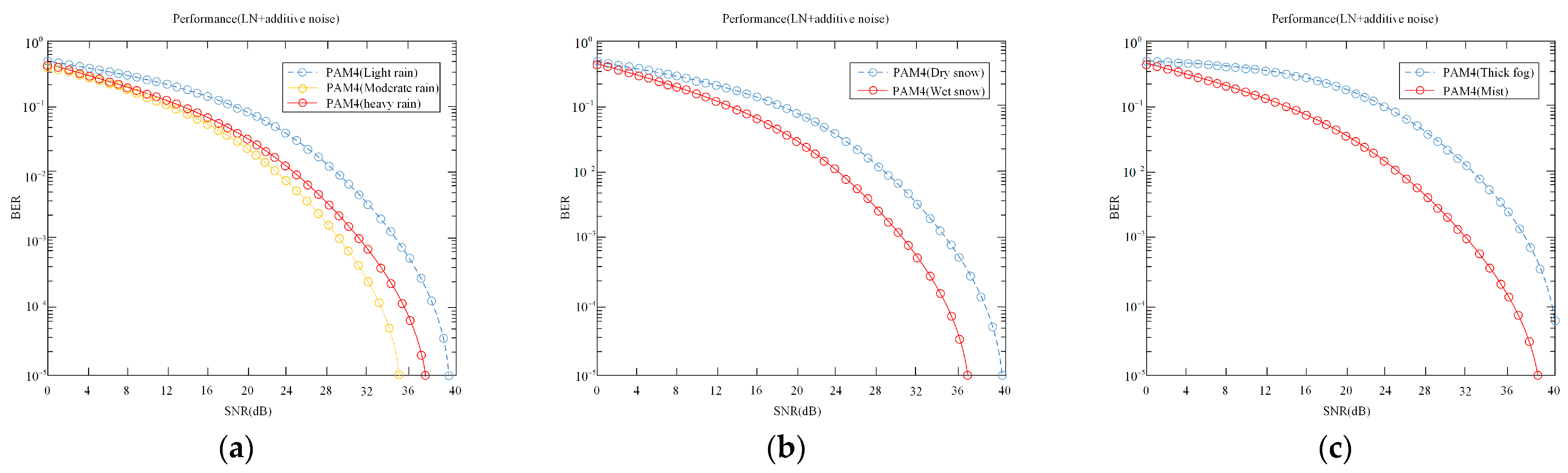
We use the low-frequency multiplicative noise data tested in the outdoor actual environment to research and analyze the lognormal noise model and test the noise data in light rain, moderate rain, heavy rain, wet snow, dry snow, mist, and thick fog weather. The noise mean has been normalized, and the variance after noise fitting is 0.092, 0.053, 0.057, 0.114, 0.156, 0.133, and 0.215, respectively. Through numerical calculation and the BER formula of Equation (13), the BER performance results are obtained, as shown in
Figure 13a. As can be seen from
Figure 13a, for the BER of 10
−5, light rain, moderate rain, and heavy rain, respectively, need 39.2 dB, 35.1 dB, and 37.3 dB. The SNR difference is 4.1 dB and 2.2 dB in the case of the same SNR, and the BER of light rain is greater than the BER of heavy rain and moderate rain because the backscattering of rain particles is large in light rain weather. At this time, the signal attenuation is more serious, with the increase in rain, the radius of rain particles increases, but the number remains almost unchanged, the forward scattering will increase with the increase in rain particles; at this time, the signal attenuation is small, resulting in the variance in the case of light rain is greater than the variance in the case of moderate rain and heavy rain, so the BER in the case of light rain is large.
Comparing
Figure 10 can be seen to achieve the BER of 10
−5, white Gaussian noise requires a SNR of 13.8 dB, the GMM noise model requires a SNR of 16.6 dB and 18.9 dB, and in such a SNR, light rain, moderate rain, and heavy rain are greater than 10
−1. Even in the case of 20 dB SNR, the BER is also very large; therefore, the influence of the lognormal noise model on the BER of PAM4 is much greater than that of the GMM noise model. The reason for this huge difference is that the influence of the lognormal noise belongs to multiplicative noise, the reaction channel state information, and CMM noise belongs to additive noise, the fluctuation of the multiplicative noise is more violent, has low uniformity, and a greater impact on BER performance.
The BER performance results in the case of snowy days are shown in
Figure 13b. As can be seen from
Figure 13b, under the same SNR, the BER of dry snow is greater than that of wet snow. For the BER of 10
−5, the SNR difference in the two weather conditions is 2.9 dB. Comparing
Figure 13a,b, the BER performance on snowy days is generally greater than on rainy days. This can be seen from the variance after fitting the noise data. The noise variance on snowy days is greater than on rainy days, and the attenuation of the signal is greater than on rainy days, resulting in the BER performance being worse overall than on rainy days.
The BER performance results in the case of foggy days are shown in
Figure 13c. As shown in
Figure 13c, under the same SNR, the BER of thick fog is greater than that of mist. For the BER of 10
−5, the mist needs a SNR of 38.5 dB, while when the thick fog is 40 dB SNR, the BER is of the order of 10
−4, so the BER performance in thick fog weather is worse, which can be seen from the variance after fitting the noise data. Compared with
Figure 13a,c, the BER performance on foggy days is greater than that on rainy days, the noise variance on foggy days is greater than that on rainy days, and the attenuation of the signal is greater than that on rainy days, resulting in the BER performance being worse than that on rainy days.
4.3. Mixed Noise
There will be both additive and multiplicative noise in the optical communication system, so we use the measured low-frequency multiplicative noise and the additive noise data of Xi’an, Beijing, and Changchun for research and analysis. The obtained rainy days, snowy days, and foggy days relationship of BER with SNR is shown in
Figure 14a–c,
Figure 15a–c and
Figure 16a–c. It can be seen from
Figure 14 that for the BER of 10
−5, light rain, moderate rain, and heavy rain need 39.4 dB, 35.3 dB, and 37.5 dB, respectively. Dry snow and wet snow need 37.2 dB and 39.8 dB, respectively; mist needs 38.6 dB, and thick fog is greater than 40 dB, comparing
Figure 14 with
Figure 13. It can be seen that there is almost no difference between the BER under the condition that the multiplicative noise and the additive noise exist at the same time and the BER where only the multiplicative noise exists. The reason is that the influence of the multiplicative noise is much greater than the influence of the additive noise. The additive noise generally refers to the background noise of the system, mainly thermal noise and shot noise. The multiplicative noise refers to the physical characteristics of the signal through some medium during propagation so that the amplitude of the signal itself changes randomly, and the information contained in the signal is lost. The multiplicative noise appears with the appearance of useful signals. When the signal disappears, the multiplicative noise will also disappear. The randomness of the multiplicative noise is caused by the time-varying and nonlinearity of the system, reflecting the fading of the channel, so the influence of the multiplicative noise is greater than that of the additive noise. When considering the multiplicative noise, the influence of the additive noise is generally negligible.
Comparing the BER curves in Xi’an, Beijing, and Changchun under the same weather, it can be seen that whether it is rainy days, snowy days, or foggy days, the BER performance is almost indistinguishable, which proves that the additive noise in different cities has a very small impact on the BER performance, and also verifies that the effect of the multiplicative noise on the BER performance is much greater than that of the additive noise.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}