
Multiobjective Energy Consumption Optimization of a Flying–Walking Power Transmission Line Inspection Robot during Flight Missions Using Improved NSGA-II

 , , and
, , and
Abstract
1. Introduction
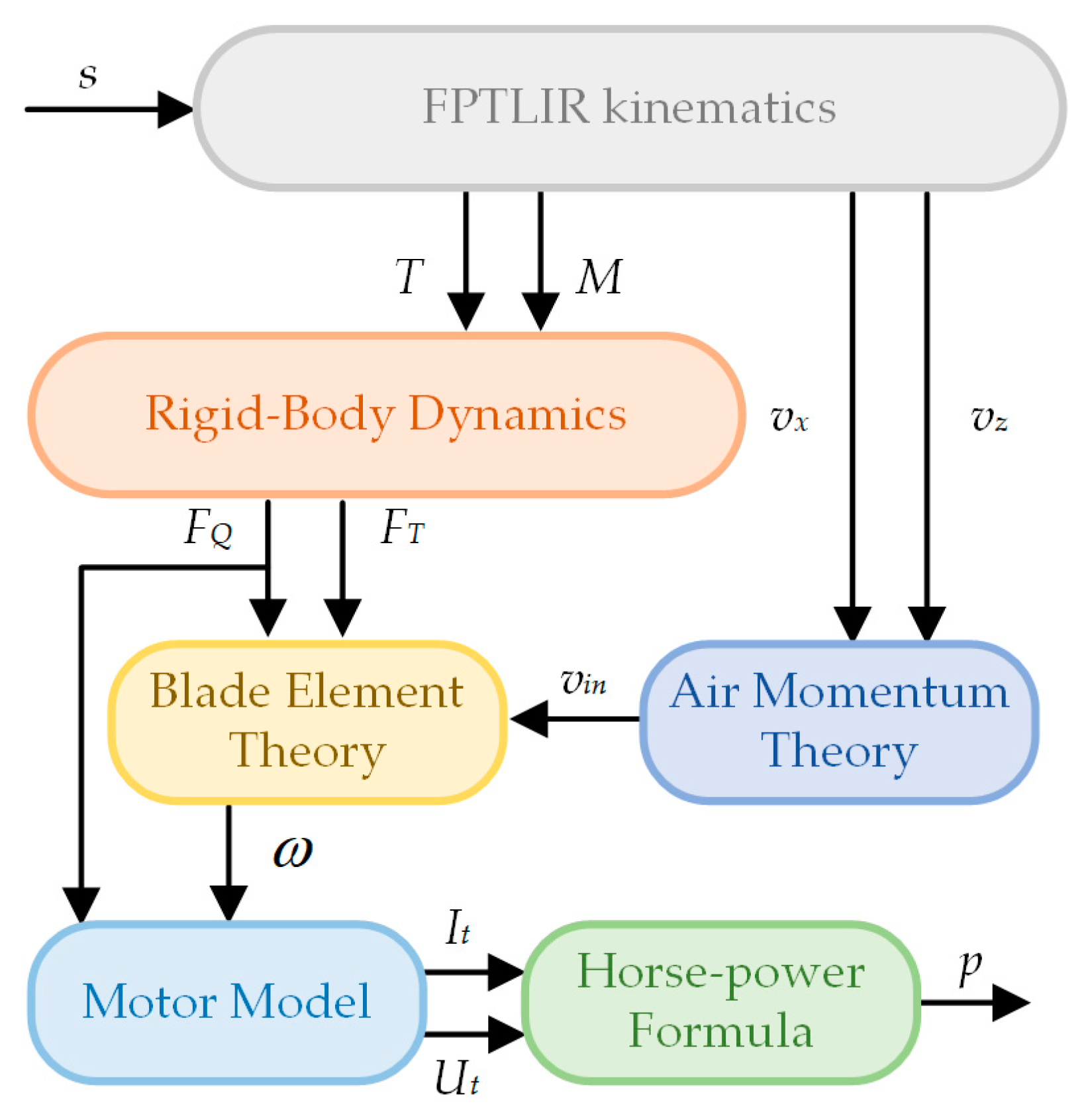
- A mathematical model is constructed to establish a relationship between the mission path and the energy consumption of the FPTLIR. This model takes into account a continuous derivation of the FPTLIR kinematics to the motor dynamics of the end effector and incorporates theories on blade units and aerodynamics. By considering these factors simultaneously, the accuracy and suitability of the model is improved, making it suitable for building a multiobjective optimization model;
- An optimization model is developed with energy consumption and time as objectives, based on the energy consumption model. Complex constraint indices such as stability and safety during the FPTLIR missions are quantified and considered in the model. The influence of the uniform variable velocity flight state phase on energy consumption is also considered. This improves the adaptability of the model to actual mission requirements;
- An optimization approach is proposed for energy consumption and execution time during the FPTLIR’s both on-line and off-line mission paths. The approach uses an improved NSGA-II optimization algorithm that incorporates concepts from the Cauchy variation operator and the simulated annealing algorithm. This improvement improves the robustness and local search capability of the algorithm under complex constraints. In addition, the proposed approach effectively reduces energy consumption and ensures the shortest mission execution time under the corresponding energy consumption.
2. System Overview
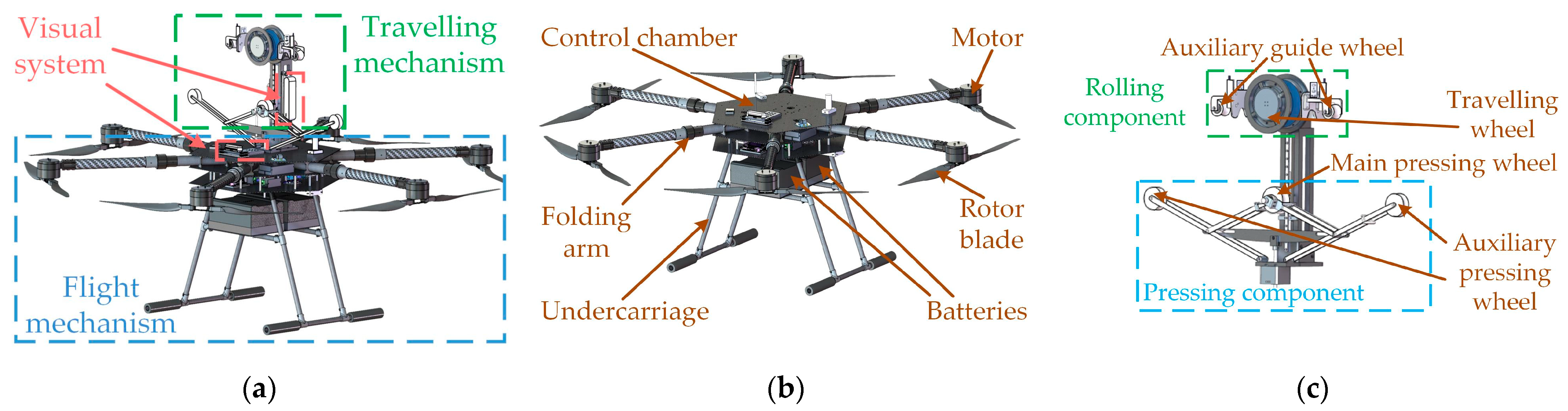
2.1. System Structure
2.2. Hardware Integration
3. Operational Criteria
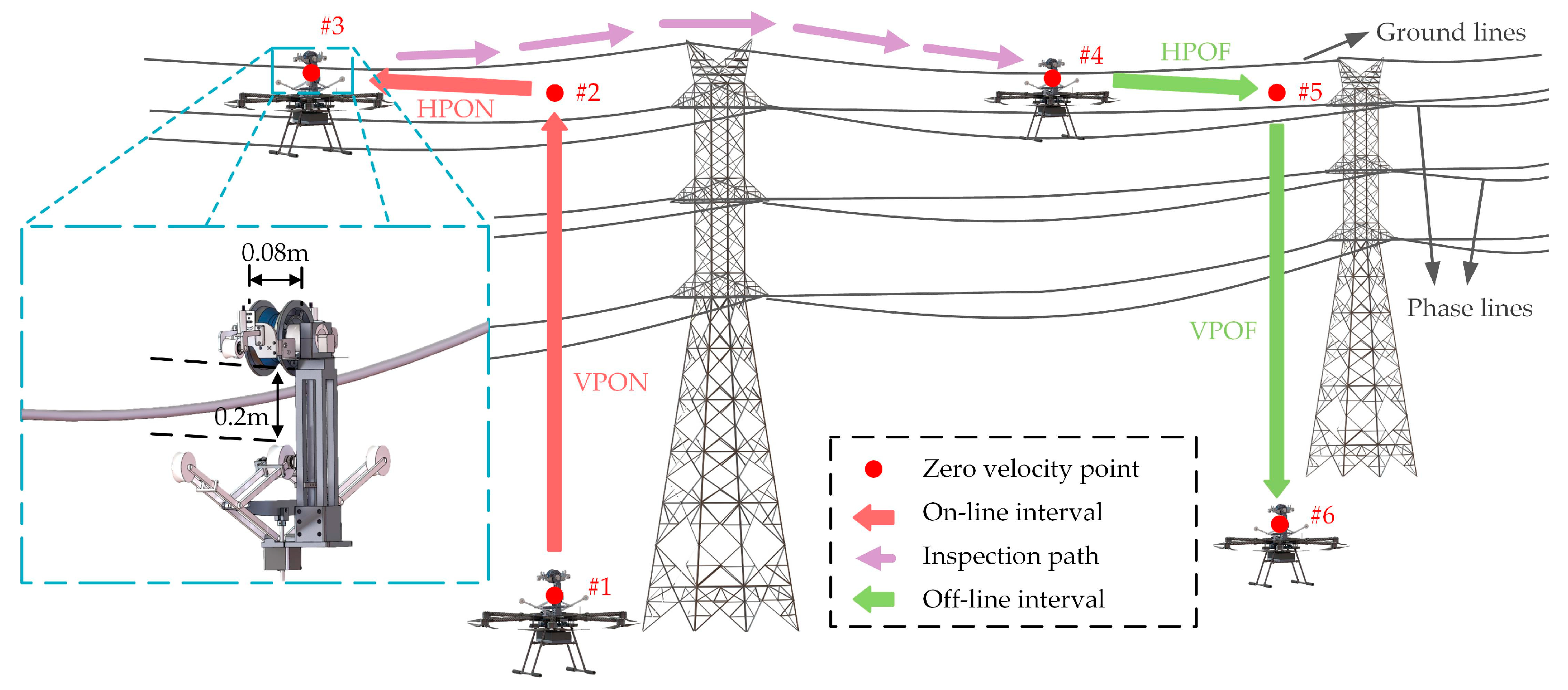
3.1. Working Conditions
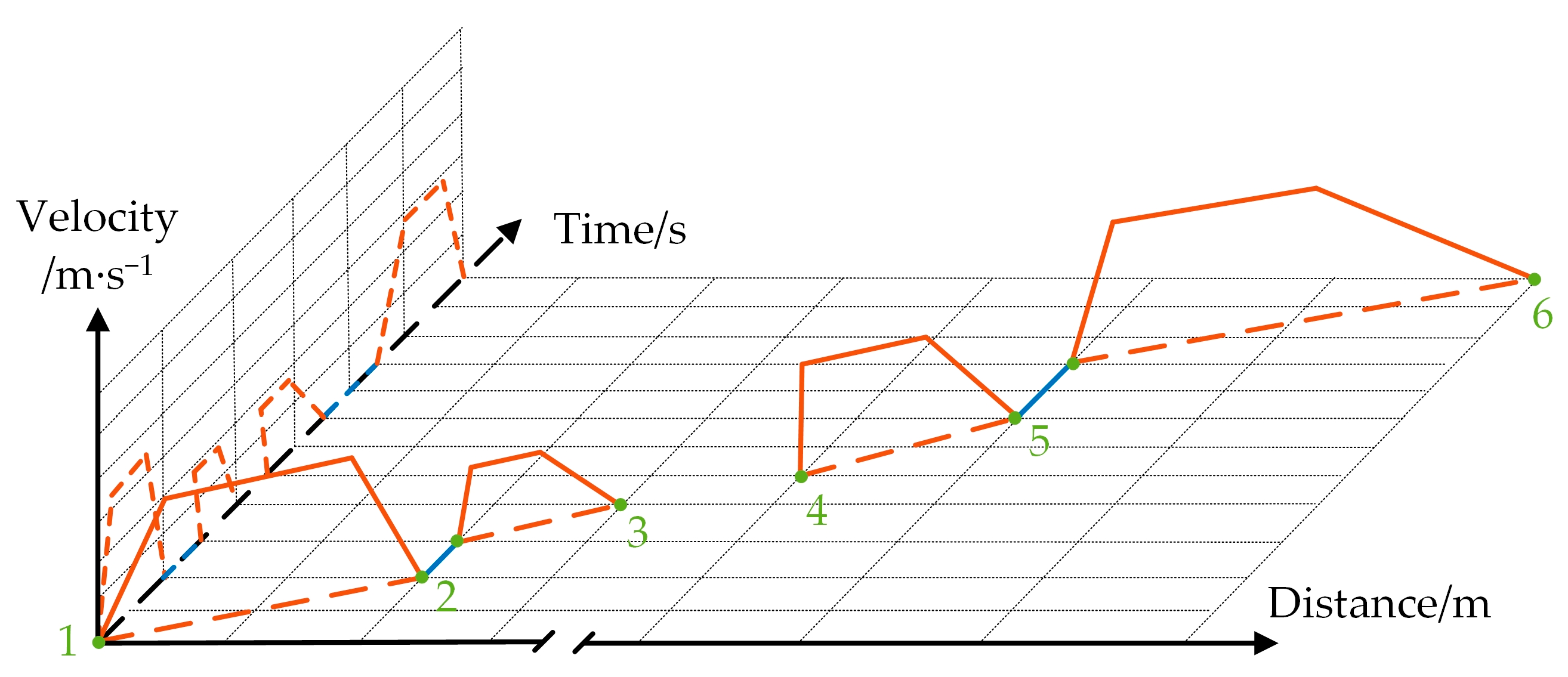
3.2. Mission Path Planning
4. Energy Consumption Modeling
4.1. Subsystem Model
4.2. System Model
5. Multiobjective Optimization Approach
5.1. Multiobjective Optimization Modeling
5.1.1. Mission Path Model
5.1.2. Constraints and Objective Functions
5.1.3. Optimization Model
- The mission path parameters, FPTLIR performance, and other characteristics are known;
- There are no obstacles or wind disturbances along the FPTLIR’s mission path;
- The power consumption of the onboard auxiliary equipment for the FPTLIR remains constant throughout the mission. This paper aims to address the issue of energy consumption and mission execution time in the FPTLIR during two different mission intervals of on-line and off-line missions.
5.2. Improved NSGA-II
5.2.1. Genetic Operators
5.2.2. Local Search using Achievement Scalar Function
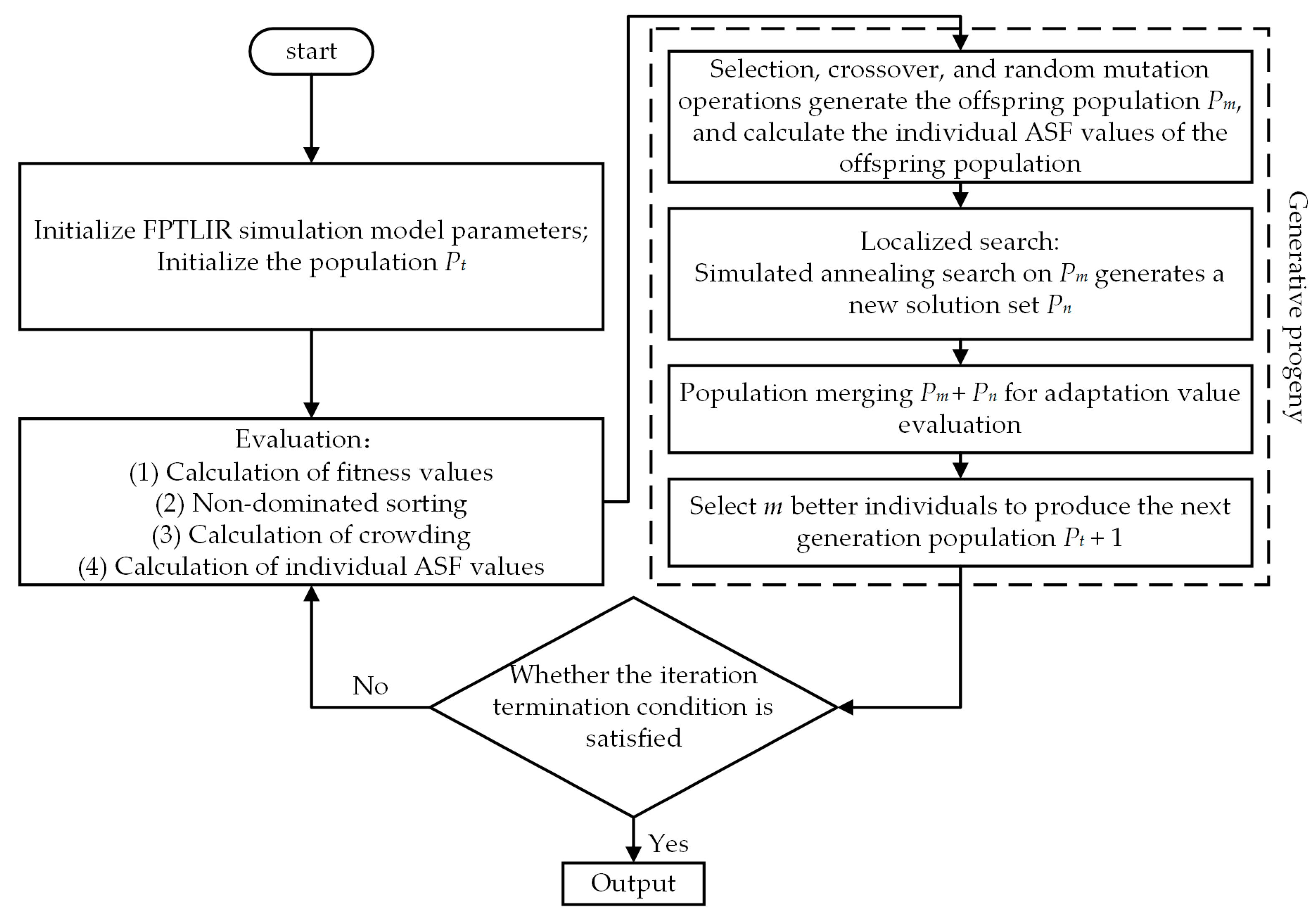
5.2.3. Algorithm Flow
- Input the parameters of the multiobjective optimization model based on flight energy consumption, including acceleration and velocity constraints, mission interval time constraints, etc. Set algorithm parameters such as iteration number, initial population size, crossover and mutation probabilities, initial temperature, decay coefficient, and final temperature. Initialize the population and calculate objective functions;
- Calculate fitness values for parental individuals using non-dominated sorting and crowding degree calculation methods before calculating the ASF values;
- Generate offspring population by performing crossover and random mutation operations on paternal individuals while also calculating the ASF values for offspring individuals;
- Perform simulated annealing search on the offspring population to compare the parent and offspring ASF values before determining whether to incorporate the new solution set using the Metropolis criterion or to merge with the parent;
- Use the selection operation to determine whether the termination condition or maximum evolutionary generation limit has been reached before outputting results or returning to Step 2.
| Algorithm 1 Improved NSGA-II Algorithm |
| % Input: Flight energy model parameters and constraints, population size N, % maximum generations T, crossover probability Pc, mutation probability Pm, % initial temperature T0, cooling rate alpha, final temperature Tf % Output: Optimized solution set for energy consumption and mission time % Initialize population for i = 1:N population(i) = initialize_individual(); [objectives(i), constraints(i)] = evaluate(population(i)); end % Begin evolution t = 0; while t < T [fronts, ranks] = fast_nondominated_sort(population); % Fast non-dominated sorting distances = crowding_distance(fronts); % Crowding distance calculation parents = binary_tournament_selection(population, ranks, distances, Pc); % Selection children = crossover_and_mutation(parents, Pm); % Crossover and mutation [objectives_children, constraints_children] = evaluate(children); % Evaluate offspring [population, ranks] = merge_and_sort(population, children); % Merge and sort population = elite_selection(population, ranks, distances, N); % Elite selection based on crowding distance population = asf_local_search(population); % Local search with ASF population = simulated_annealing(population, T0, alpha); % Simulated annealing decision T0 = alpha * T0; % Update temperature t = t + 1; % Increment generation counter end % Output the final solution set optimized_set = population(ranks == 1); % Select the non-dominated set |
5.3. Numerical Results of the Algorithm
6. Simulation and Test Results
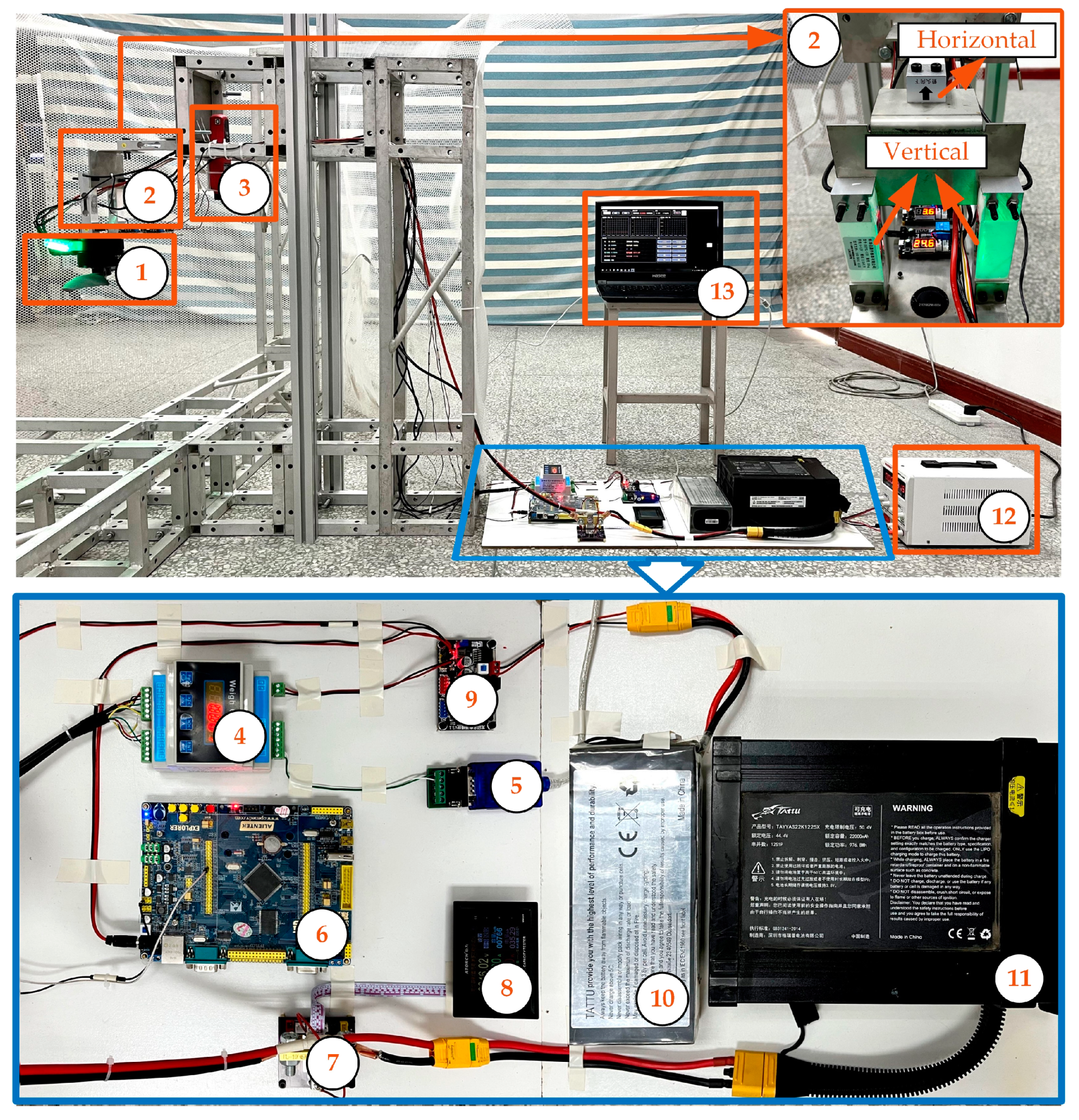
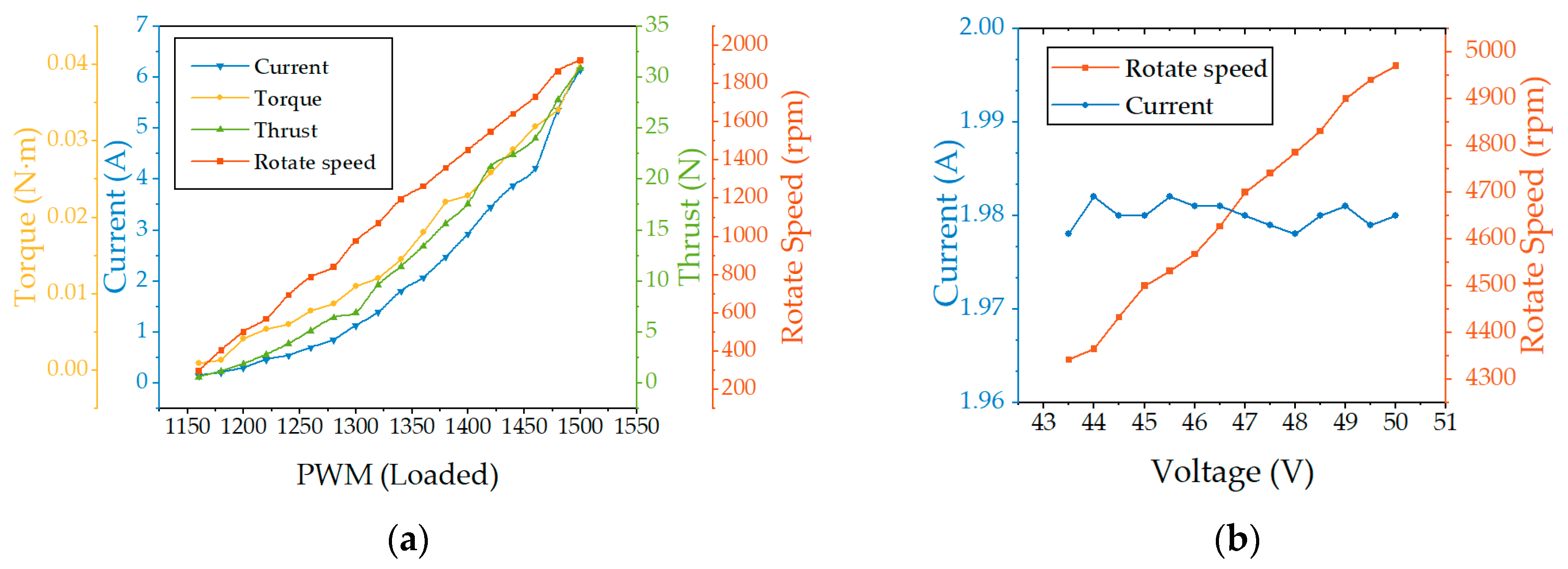
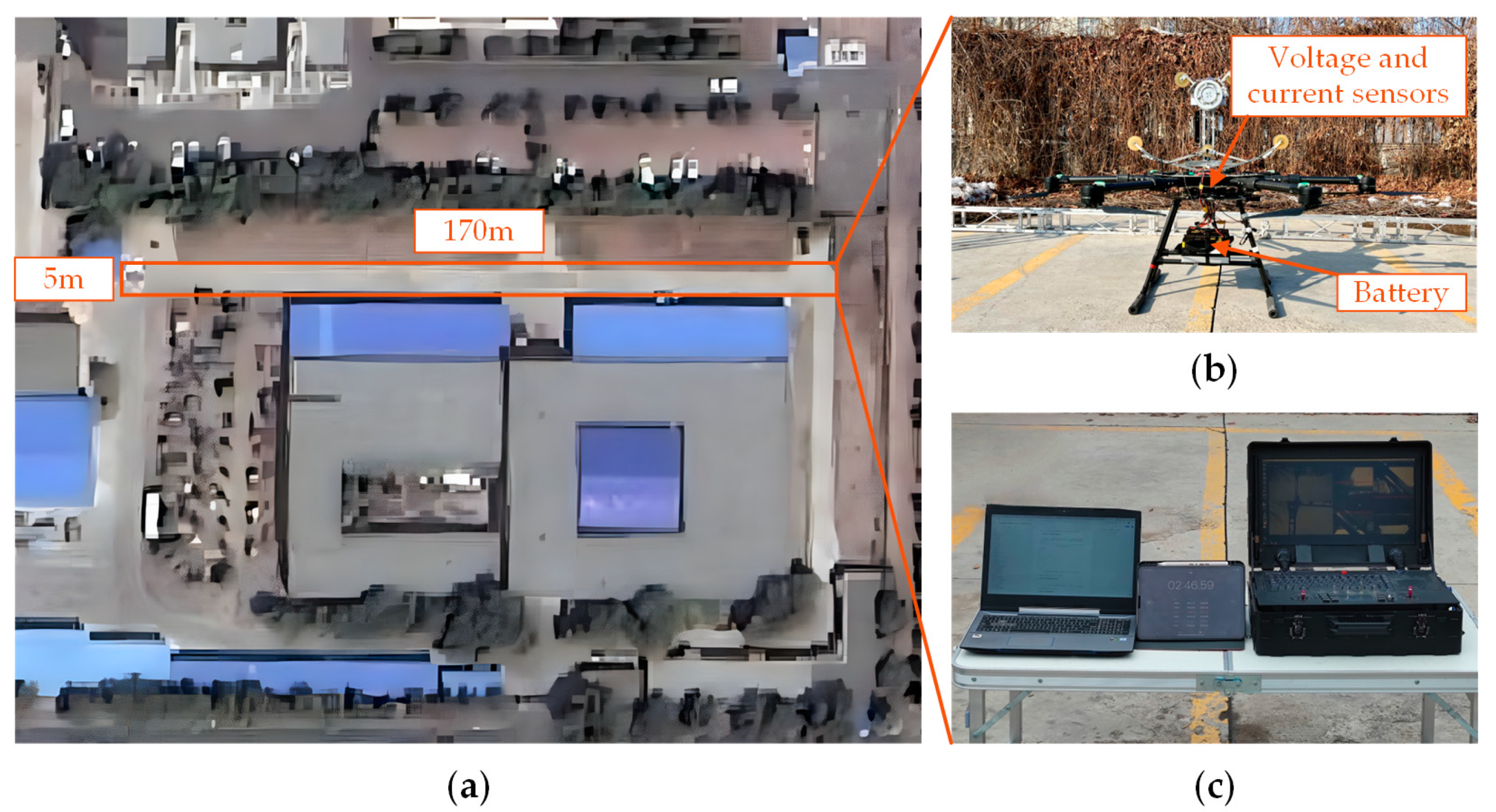
6.1. Parameter Measurement Tests
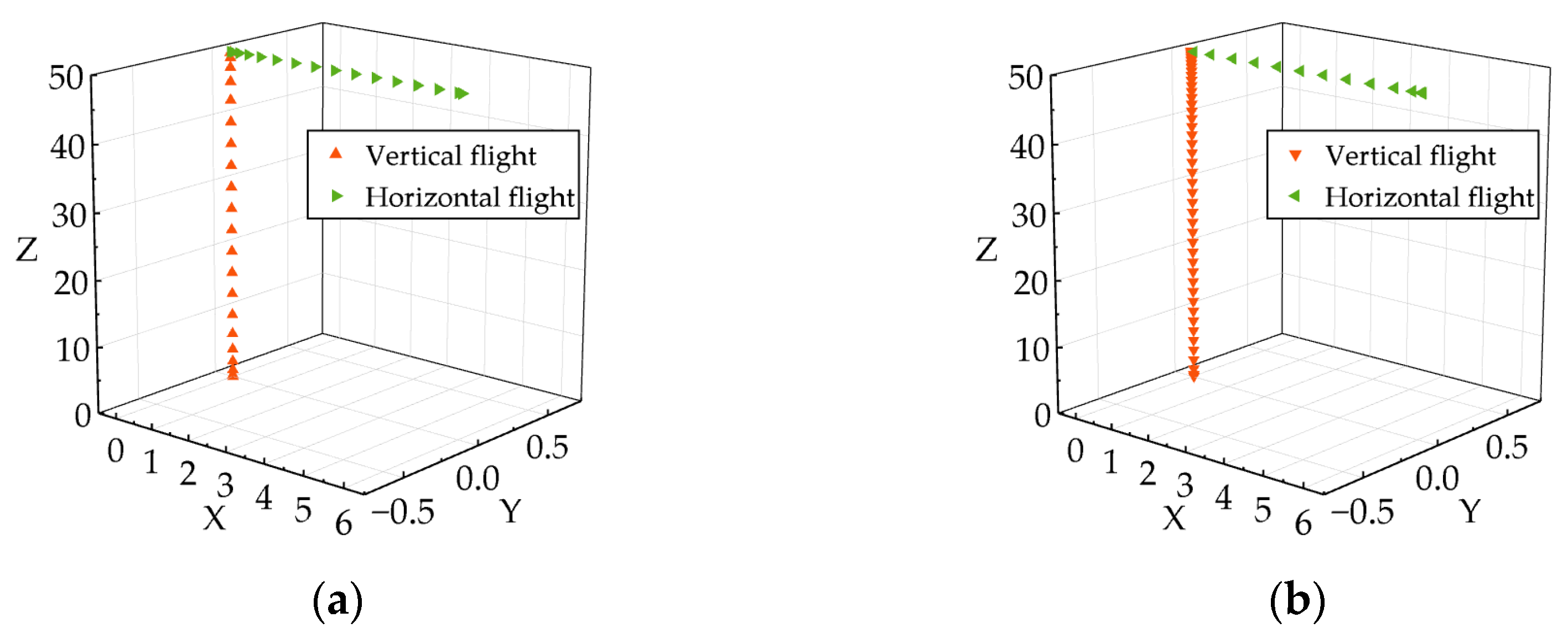
6.2. Flight Mission Path Simulation
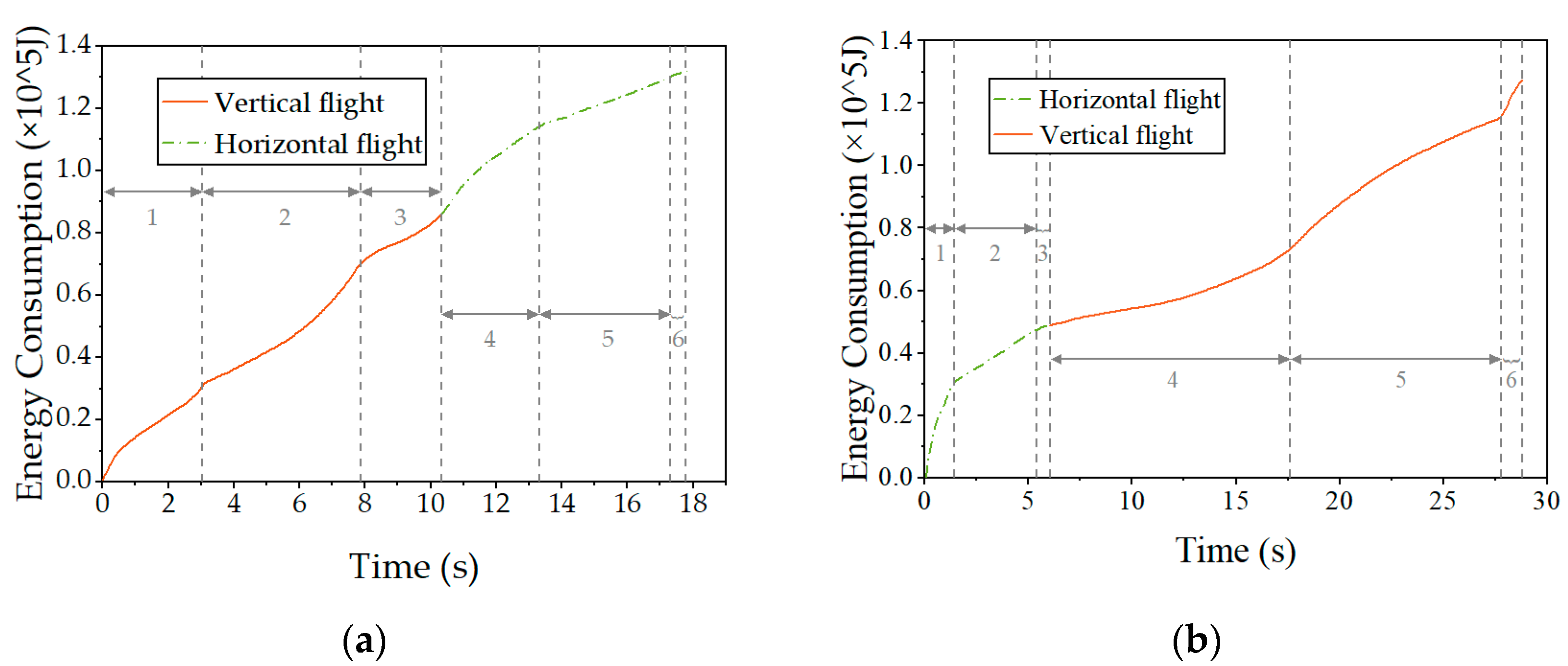
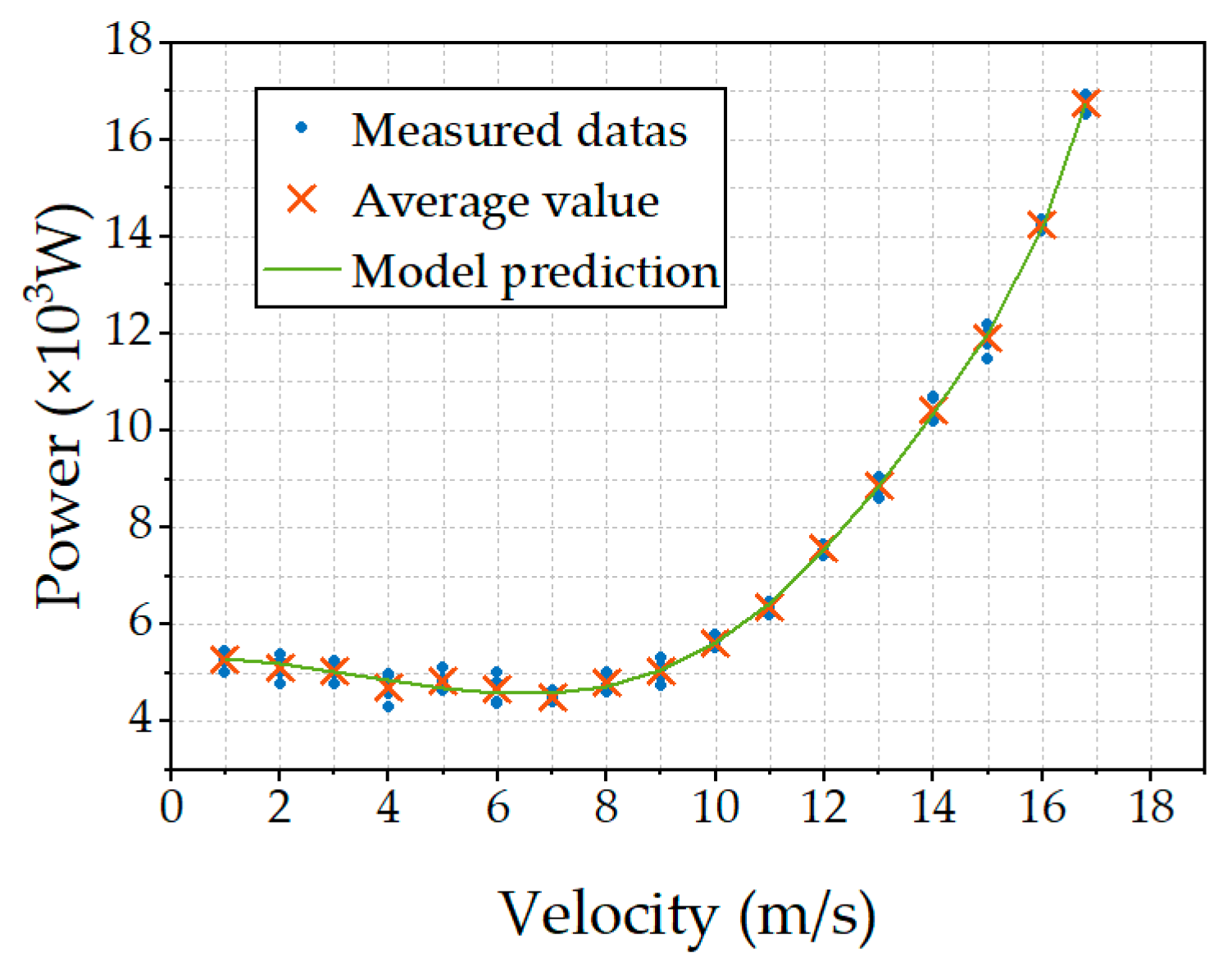
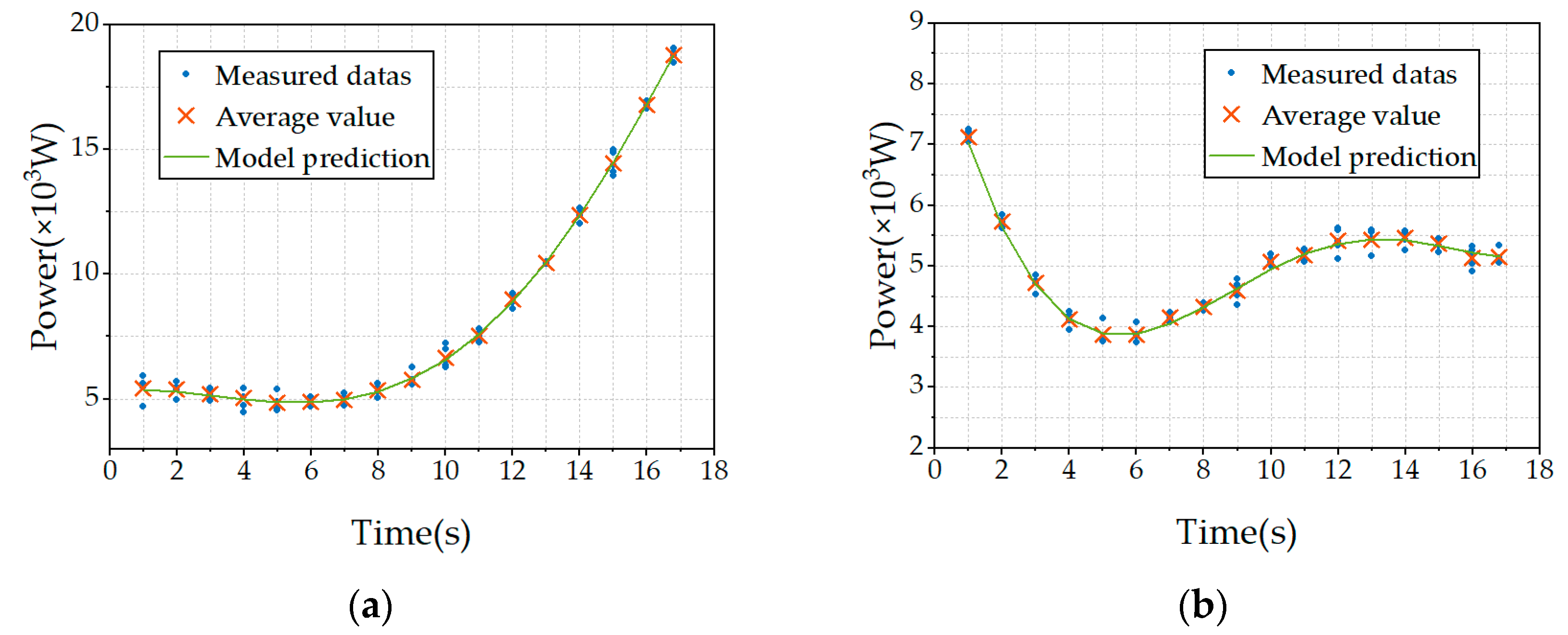
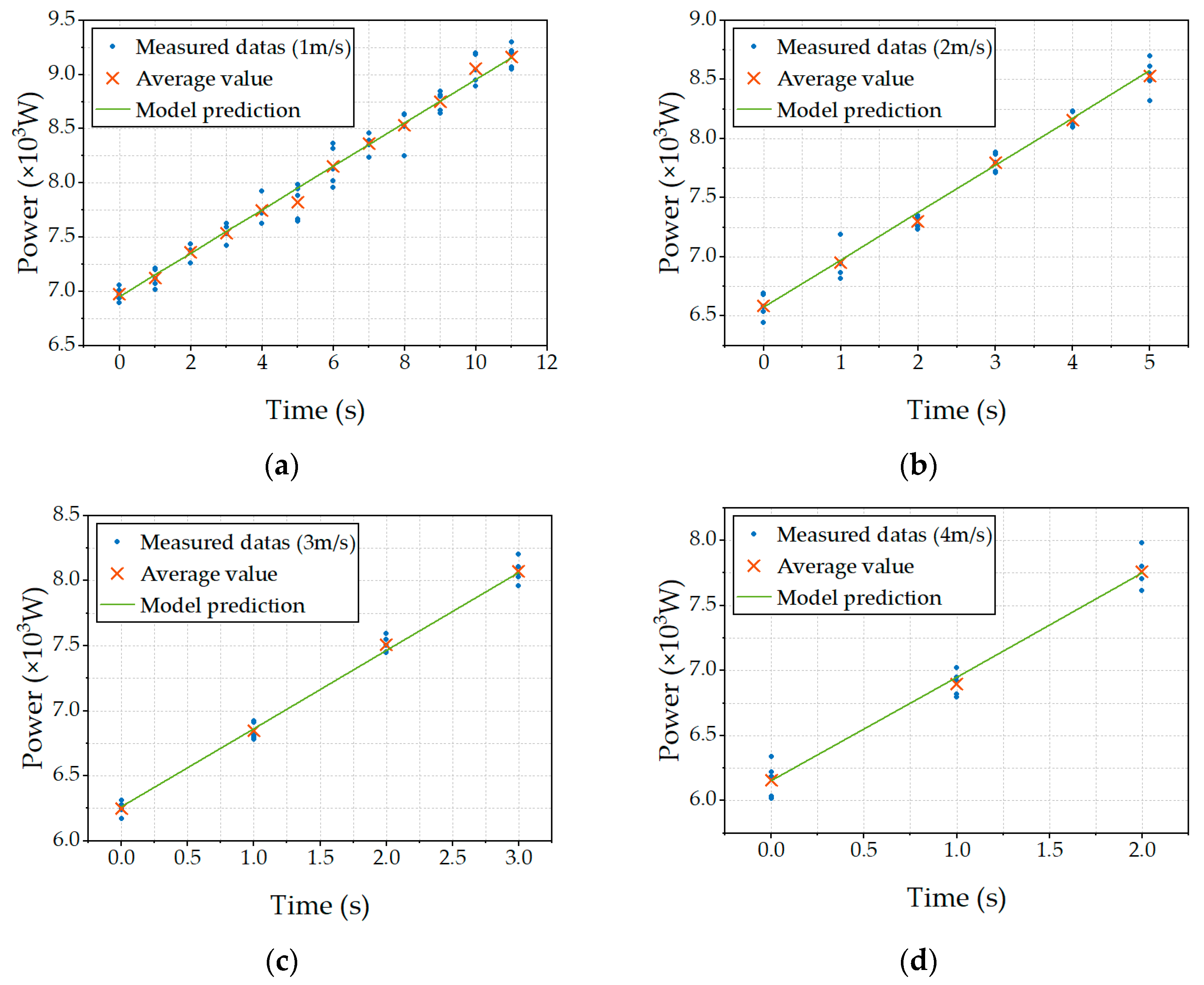
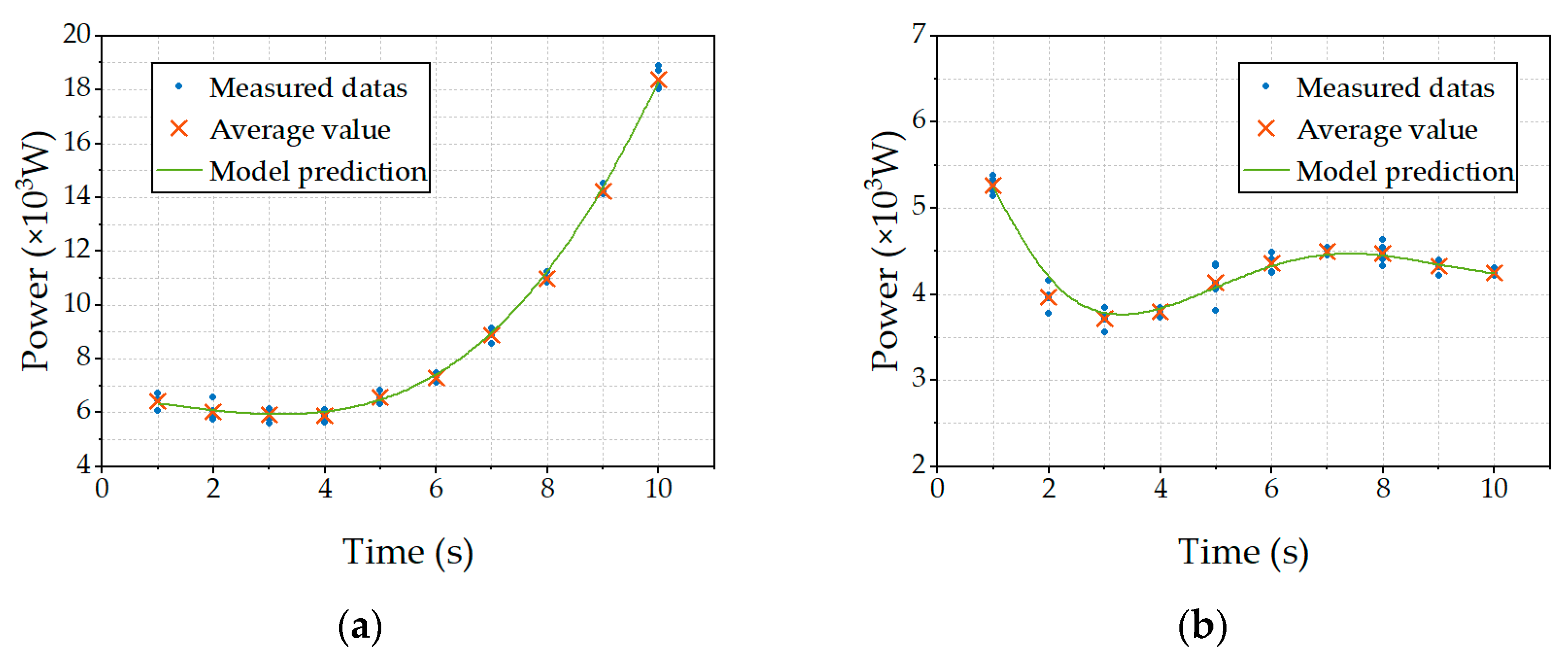
6.3. Energy Consumption Model Validation Tests
7. Discussion
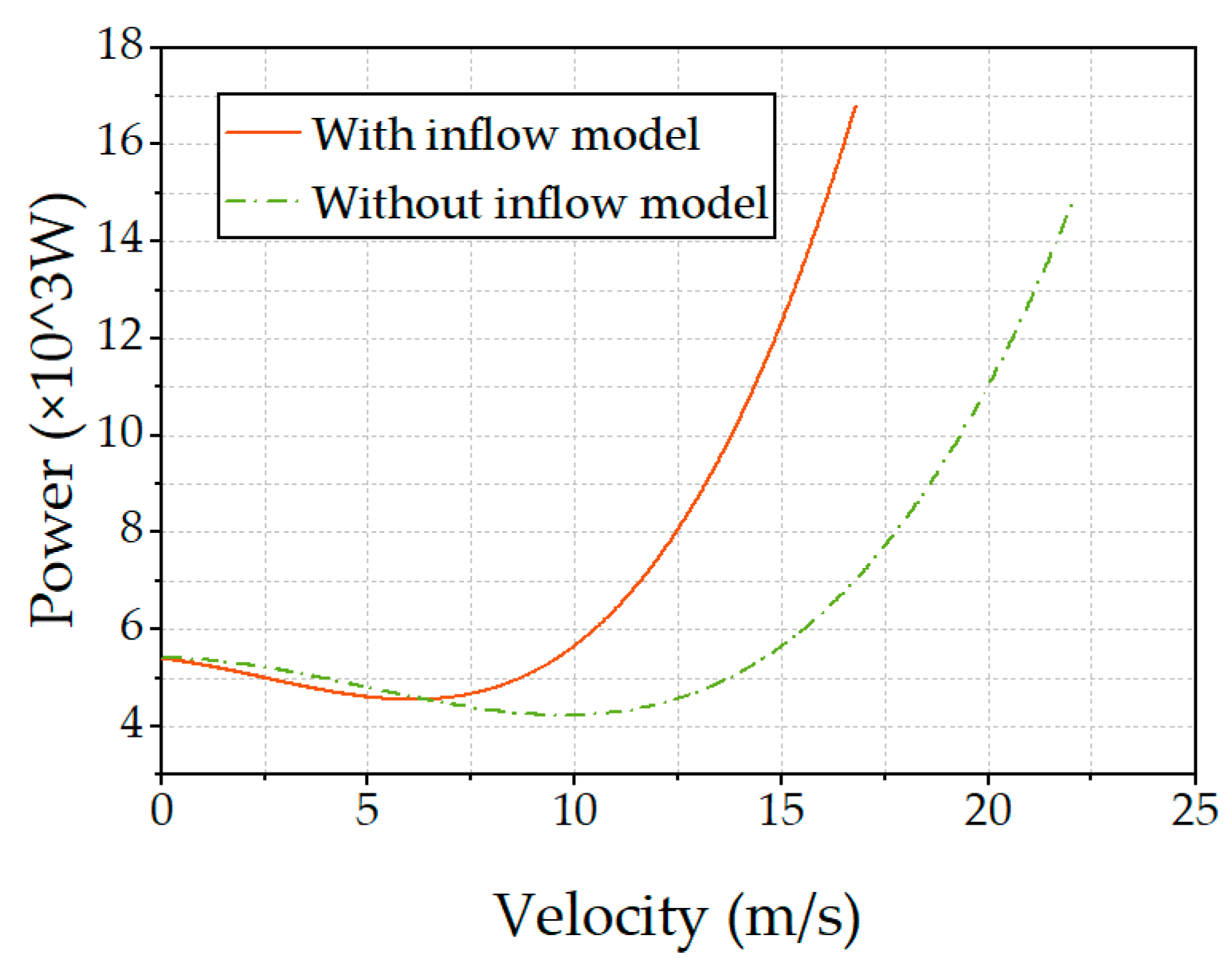
7.1. Effect of the Key Parameters on Energy Modeling
7.2. Comparison of Different Algorithms
7.3. Limitations and Future Work
8. Conclusions
- A mathematical model of system-level energy consumption was derived. The relationship between the mission path and energy consumption of the FPTLIR was established by progressively deriving from the FPTLIR kinematics to end-effector motor dynamics, making the model more suitable for constructing the multiobjective optimization model. The incorporation of the blade unit theory and aerodynamic analysis improved the accuracy of the energy consumption model. The prediction accuracy of the energy consumption model is further improved by using a self-built test platform to measure and fit the energy consumption model parameters. After experimental validation in different paths and flight states, the model showed good performance with an average relative error ranging from 0.76% to 3.24% compared to actual power predictions;
- A multiobjective optimization model was constructed based on the energy consumption model, considering energy consumption and execution time under the flight mission path. The adaptability to real mission requirements was improved by quantifying the stability, safety, and other relevant constraints of the FPTLIR during mission execution, along with integrating the analysis of energy consumption in complex flight states;
- An optimization approach based on the improved NSGA-II algorithm was proposed to optimize the energy consumption and mission execution time of the FPTLIR during flight missions. The NSGA-II optimization algorithm was improved by incorporating the Cauchy variation operator and integrating the principles of simulated annealing, thereby improving its robustness and local search capability in complex constraint scenarios. The optimal energy consumption for completing the on-line mission in the shortest time of 8.22 s was determined as 1.3750 × 105 J. Following optimization, the shortest total time for completing the on-line mission with the lowest energy consumption of 1.3017 × 105 J was determined as 17.77 s, saving 5.33% of energy consumption. Similarly, for completing off-line missions within a minimal timeframe of 9.84 s, the optimal energy consumption was found to be 1.3667 × 105 J. After optimization, the shortest time for completing the off-line mission was 28.78 s with the minimum energy consumption of 1.2983 × 105 J, saving 5.01% of energy consumption. The proposed optimization approach effectively minimized energy consumption while ensuring minimal mission execution times at corresponding energy consumption levels, thereby improving the overall system flight efficiency.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, Y.; Wen, B.; Ye, Y.; Yang, C. Multi-Defect Detection Network for High-Voltage Insulators Based on Adaptive Multi-Attention Fusion. Appl. Sci. 2023, 13, 13351. [Google Scholar] [CrossRef]
- Yang, L.; Fan, J.; Liu, Y.; Li, E.; Peng, J.; Liang, Z. A Review on State-of-the-Art Power Line Inspection Techniques. IEEE Trans. Instrum. Meas. 2020, 69, 9350–9365. [Google Scholar] [CrossRef]
- Menendez, O.; Auat Cheein, F.A.; Perez, M.; Kouro, S. Robotics in Power Systems: Enabling a More Reliable and Safe Grid. IEEE Ind. Electron. Mag. 2017, 11, 22–34. [Google Scholar] [CrossRef]
- Foudeh, H.A.; Luk, P.; Whidborne, J. Application of Norm Optimal Iterative Learning Control to Quadrotor Unmanned Aerial Vehicle for Monitoring Overhead Power System. Energies 2020, 13, 3223. [Google Scholar] [CrossRef]
- Cantieri, A.; Ferraz, M.; Szekir, G.; Antônio Teixeira, M.; Lima, J.; Schneider Oliveira, A.; Aurélio Wehrmeister, M. Cooperative UAV–UGV Autonomous Power Pylon Inspection: An Investigation of Cooperative Outdoor Vehicle Positioning Architecture. Sensors 2020, 20, 6384. [Google Scholar] [CrossRef] [PubMed]
- Guan, H.; Sun, X.; Su, Y.; Hu, T.; Wang, H.; Wang, H.; Peng, C.; Guo, Q. UAV-Lidar Aids Automatic Intelligent Powerline Inspection. Int. J. Electr. Power Energy Syst. 2021, 130, 106987. [Google Scholar] [CrossRef]
- Liu, Y.; Shi, J.; Liu, Z.; Huang, J.; Zhou, T. Two-Layer Routing for High-Voltage Powerline Inspection by Cooperated Ground Vehicle and Drone. Energies 2019, 12, 1385. [Google Scholar] [CrossRef]
- Fan, F.; Wu, G.; Wang, M.; Cao, Q.; Yang, S. Multi-Robot Cyber Physical System for Sensing Environmental Variables of Transmission Line. Sensors 2018, 18, 3146. [Google Scholar] [CrossRef]
- Yue, X.; Feng, Y.; Jiang, B.; Wang, L.; Hou, J. Automatic Obstacle-Crossing Planning for a Transmission Line Inspection Robot Based on Multisensor Fusion. IEEE Access 2022, 10, 63971–63983. [Google Scholar] [CrossRef]
- Gonçalves, R.S.; Carvalho, J.C.M. A Mobile Robot to Be Applied in High-Voltage Power Lines. J. Braz. Soc. Mech. Sci. Eng. 2015, 37, 349–359. [Google Scholar] [CrossRef]
- Alhassan, A.B.; Zhang, X.; Shen, H.; Xu, H. Power Transmission Line Inspection Robots: A Review, Trends and Challenges for Future Research. Int. J. Electr. Power Energy Syst. 2020, 118, 105862. [Google Scholar] [CrossRef]
- Miralles, F.; Hamelin, P.; Lambert, G.; Lavoie, S.; Pouliot, N.; Montfrond, M.; Montambault, S. LineDrone Technology: Landing an Unmanned Aerial Vehicle on a Power Line. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 6545–6552. [Google Scholar]
- Wang, H.; Li, E.; Yang, G.; Guo, R. Design of an Inspection Robot System with Hybrid Operation Modes for Power Transmission Lines. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 2571–2576. [Google Scholar]
- Bian, J.; Hui, X.; Zhao, X.; Tan, M. A Novel Development of Robots with Cooperative Strategy for Long-Term and Close-Proximity Autonomous Transmission-Line Inspection. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 1898–1904. [Google Scholar]
- Morbidi, F.; Cano, R.; Lara, D. Minimum-Energy Path Generation for a Quadrotor UAV. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1492–1498. [Google Scholar]
- Chang, W.; Yang, G.; Yu, J.; Liang, Z.; Cheng, L.; Zhou, C. Development of a Power Line Inspection Robot with Hybrid Operation Modes. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 973–978. [Google Scholar]
- Li, Z.; Tian, Y.; Yang, G.; Li, E.; Zhang, Y.; Chen, M.; Liang, Z.; Tan, M. Vision-Based Autonomous Landing of a Hybrid Robot on a Powerline. IEEE Trans. Instrum. Meas. 2023, 72, 3501711. [Google Scholar] [CrossRef]
- Shen, H.; Zhang, X.; Alhassan, A.B.; Xu, H.; Zhang, X.; Huang, W. Research on the Adaptive Control Method of Pre-Landing for High Voltage Transmission Line Inspection Robot Based on Multi-Body Transfer Matrix Method. In Proceedings of the 2020 10th Institute of Electrical and Electronics Engineers International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Xi’an, China, 10–14 October 10 2020; pp. 312–317. [Google Scholar]
- Zhang, T.; Dai, J. Electric Power Intelligent Inspection Robot: A Review. J. Phys. Conf. Ser. 2021, 1750, 012023. [Google Scholar] [CrossRef]
- Yang, Z.; Xu, W.; Shikh-Bahaei, M. Energy Efficient UAV Communication with Energy Harvesting. IEEE Trans. Veh. Technol. 2020, 69, 1913–1927. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Energy-Efficient UAV Communication with Trajectory Optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef]
- Beigi, P.; Rajabi, M.S.; Aghakhani, S. An Overview of Drone Energy Consumption Factors and Models; Springer: Geneva, Switzerland, 2022. [Google Scholar]
- Jia, G.; Li, C.; Li, M. Energy-Efficient Trajectory Planning for Smart Sensing in IoT Networks Using Quadrotor UAVs. Sensors 2022, 22, 8729. [Google Scholar] [CrossRef] [PubMed]
- Hong, D.; Lee, S.; Cho, Y.H.; Baek, D.; Kim, J.; Chang, N. Least-Energy Path Planning with Building Accurate Power Consumption Model of Rotary Unmanned Aerial Vehicle. IEEE Trans. Veh. Technol. 2020, 69, 14803–14817. [Google Scholar] [CrossRef]
- Wu, M.; Chen, W.; Tian, X. Optimal Energy Consumption Path Planning for Quadrotor UAV Transmission Tower Inspection Based on Simulated Annealing Algorithm. Energies 2022, 15, 8036. [Google Scholar] [CrossRef]
- Góra, K.; Smyczyński, P.; Kujawiński, M.; Granosik, G. Machine Learning in Creating Energy Consumption Model for UAV. Energies 2022, 15, 6810. [Google Scholar] [CrossRef]
- Abeywickrama, H.V.; Jayawickrama, B.A.; He, Y.; Dutkiewicz, E. Comprehensive Energy Consumption Model for Unmanned Aerial Vehicles, Based on Empirical Studies of Battery Performance. IEEE Access 2018, 6, 58383–58394. [Google Scholar] [CrossRef]
- Prasetia, A.S.; Wai, R.-J.; Wen, Y.-L.; Wang, Y.-K. Mission-Based Energy Consumption Prediction of Multirotor UAV. IEEE Access 2019, 7, 33055–33063. [Google Scholar] [CrossRef]
- Yacef, F.; Rizoug, N.; Degaa, L.; Bouhali, O.; Hamerlain, M. Energy Efficiency Path Planning for a Quadrotor Aerial Vehicle. Trans. Inst. Meas. Control 2021, 014233122110585. [Google Scholar] [CrossRef]
- Dai, X.; Duo, B.; Yuan, X.; Tang, W. Energy-Efficient UAV Communications: A Generalized Propulsion Energy Consumption Model. IEEE Wirel. Commun. Lett. 2022, 11, 2150–2154. [Google Scholar] [CrossRef]
- Yan, H.; Chen, Y.; Yang, S.-H. New Energy Consumption Model for Rotary-Wing UAV Propulsion. IEEE Wirel. Commun. Lett. 2021, 10, 2009–2012. [Google Scholar] [CrossRef]
- Li, B.; Na, Z.; Lin, B. UAV Trajectory Planning from a Comprehensive Energy Efficiency Perspective in Harsh Environments. IEEE Netw. 2022, 36, 62–68. [Google Scholar] [CrossRef]
- Na, Y.; Li, Y.; Chen, D.; Yao, Y.; Li, T.; Liu, H.; Wang, K. Optimal Energy Consumption Path Planning for Unmanned Aerial Vehicles Based on Improved Particle Swarm Optimization. Sustainability 2023, 15, 12101. [Google Scholar] [CrossRef]
- Gao, H.; Lee, W.; Li, W.; Han, Z.; Osher, S.; Poor, H.V. Energy-Efficient Velocity Control for Massive Numbers of Rotary-Wing UAVs: A Mean Field Game Approach. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar]
- Yazdinejad, A.; Dehghantanha, A.; Parizi, R.M.; Epiphaniou, G. An Optimized Fuzzy Deep Learning Model for Data Classification Based on NSGA-II. Neurocomputing 2023, 522, 116–128. [Google Scholar] [CrossRef]
- Yazdinejad, A.; Parizi, R.M.; Dehghantanha, A.; Srivastava, G.; Mohan, S.; Rababah, A.M. Cost Optimization of Secure Routing with Untrusted Devices in Software Defined Networking. J. Parallel Distrib. Comput. 2020, 143, 36–46. [Google Scholar] [CrossRef]
- Yazdinejad, A.; Parizi, R.M.; Dehghantanha, A.; Karimipour, H.; Srivastava, G.; Aledhari, M. Enabling Drones in the Internet of Things with Decentralized Blockchain-Based Security. IEEE Internet Things J. 2021, 8, 6406–6415. [Google Scholar] [CrossRef]
- Yazdinejad, A.; Parizi, R.M.; Dehghantanha, A.; Karimipour, H. Federated Learning for Drone Authentication. Ad Hoc Netw. 2021, 120, 102574. [Google Scholar] [CrossRef]
- Zhang, J.; Lei, J.; Qin, X.; Li, B.; Li, Z.; Li, H.; Zeng, Y.; Song, J. A Fitting Recognition Approach Combining Depth-Attention YOLOv5 and Prior Synthetic Dataset. Appl. Sci. 2022, 12, 11122. [Google Scholar] [CrossRef]
- Johnson, W. Helicopter Theory; Courier Corporation: Chelmsford, MA, USA, 2012; ISBN 0-486-13182-3. [Google Scholar]
- Lawrence, D.; Mohseni, K. Efficiency Analysis for Long Duration Electric MAVs. In Proceedings of the Infotech@Aerospace, Arlington, VA, USA, 26–29 September 2005. [Google Scholar]
- Lundström, D.; Amadori, K.; Krus, P. Validation of Models for Small Scale Electric Propulsion Systems. In Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2010. [Google Scholar]
- Li, H.; Zhang, Q. Multiobjective Optimization Problems with Complicated Pareto Sets, MOEA/D and NSGA-II. IEEE Trans. Evol. Comput. 2009, 13, 284–302. [Google Scholar] [CrossRef]
- Verma, S.; Pant, M.; Snasel, V. A Comprehensive Review on NSGA-II for Multi-Objective Combinatorial Optimization Problems. IEEE Access 2021, 9, 57757–57791. [Google Scholar] [CrossRef]
- Orosz, T.; Rassõlkin, A.; Kallaste, A.; Arsénio, P.; Pánek, D.; Kaska, J.; Karban, P. Robust Design Optimization and Emerging Technologies for Electrical Machines: Challenges and Open Problems. Appl. Sci. 2020, 10, 6653. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transmission Line Voltage Level (kV) | Tower Height (m) | Vertical Clearance (m) | Ground Wire Height from Ground (m) |
|---|---|---|---|
| 110 | 15–25 | 2–3 | 10–20 |
| 220 | 30–40 | 3–4 | 20–30 |
| 330 | 35–60 | 4–5 | 25–35 |
| 550 | 45–75 | 5–6 | 30–40 |
| 750 | 65–100 | 6–7 | 40–50 |
| 1000 | 75–120 | 7–8 | 45–55 |
| Flight On-Line | Flight Off-Line | ||||
|---|---|---|---|---|---|
| Velocity Command | Shortest Flight Time | Post-Optimized | Velocity Command | Shortest Flight Time | Post-Optimized |
| 6.00 m/s2 | 2.17 m/s2 | 10.00 m/s2 | 0.84 m/s2 | ||
| 1.67 s | 3.03 s | 0.77 s | 1.41 s | ||
| 3.33 s | 4.84 s | 0 | 3.99 s | ||
| 6.00 m/s2 | 2.68 m/s2 | 10.00 m/s2 | 1.80 m/s2 | ||
| 10.00 m/s2 | 0.35 m/s2 | 6.00 m/s2 | 0.26 m/s2 | ||
| 0.78 s | 2.99 s | 1.17 s | 11.56 s | ||
| 0 | 4.01 s | 5.96 s | 9.88 s | ||
| 10.00 m/s2 | 2.29 m/s2 | 6.00 m/s2 | 2.40 m/s2 | ||
| Name | Model | Measuring Range | Precision |
|---|---|---|---|
| Parallel beam force transducer | DLPXL-150 | 0–30 kg | ±0.009 kg |
| Non-contact tachometer | UT372 | 10–9999.9 rpm | ±0.3 rpm |
| Current and voltage detector | DT24PW | 0–100 A 0–240 V | ±0.1 A ±0.01 V |
| Parameter | Value | Unit |
|---|---|---|
| 0.065–0.127r | m | |
| 0.451–1.098r | rad | |
| Air density | 1.169 | kg/m3 |
| Propeller blade number | 1 | |
| 0.073 | m | |
| 0.342 | m | |
| Linear parameter | 5.081 | rad−1 |
| 0.005 | ||
| 0.2 | Ω | |
| 1.98 | A | |
| 100 | rpm/V | |
| Rotor location | 0.821 | m |
| Mass | 38 | kg |
| 0.157 | m2 | |
| 0.444 | m2 | |
| 5.8 | kg·m2 | |
| 5.8 | kg·m2 | |
| 8.5 | kg·m2 |
| Iterations | 1 | 10 | 20 | 30 | 40 | 50 | |
|---|---|---|---|---|---|---|---|
| Algorithm/Parameter | |||||||
| Improved NSGA-II | GD | 0.131 | 0.042 | 0.018 | 0.006 | 0.007 | 0.004 |
| Mean HV | 0.542 | 0.727 | 0.784 | 0.899 | 0.972 | 0.989 | |
| Pareto front size | 35 | 44 | 49 | 52 | 50 | 50 | |
| Running time (s) | 0.846 | 4.225 | 7.624 | 12.342 | 17.563 | 22.364 | |
| Standard NSGA-II | GD | 0.216 | 0.124 | 0.101 | 0.086 | 0.057 | 0.036 |
| Mean HV | 0.421 | 0.542 | 0.692 | 0.684 | 0.724 | 0.821 | |
| Pareto front size | 21 | 33 | 42 | 39 | 41 | 45 | |
| Running time (s) | 0.692 | 3.964 | 6.017 | 8.117 | 12.031 | 16.247 | |
| MOPSO | GD | 0.203 | 0.152 | 0.128 | 0.093 | 0.059 | 0.057 |
| Mean HV | 0.433 | 0.494 | 0.511 | 0.753 | 0.724 | 0.805 | |
| Pareto front size | 22 | 29 | 36 | 43 | 41 | 43 | |
| Running time (s) | 0.765 | 3.721 | 5.924 | 8.214 | 11.220 | 15.434 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Qin, X.; Jia, W.; Lei, J.; Wang, D.; Feng, T.; Zeng, Y.; Song, J. Multiobjective Energy Consumption Optimization of a Flying–Walking Power Transmission Line Inspection Robot during Flight Missions Using Improved NSGA-II. Appl. Sci. 2024, 14, 1637. https://doi.org/10.3390/app14041637
Wang Y, Qin X, Jia W, Lei J, Wang D, Feng T, Zeng Y, Song J. Multiobjective Energy Consumption Optimization of a Flying–Walking Power Transmission Line Inspection Robot during Flight Missions Using Improved NSGA-II. Applied Sciences. 2024; 14(4):1637. https://doi.org/10.3390/app14041637
Chicago/Turabian StyleWang, Yanqi, Xinyan Qin, Wenxing Jia, Jin Lei, Dexin Wang, Tianming Feng, Yujie Zeng, and Jie Song. 2024. "Multiobjective Energy Consumption Optimization of a Flying–Walking Power Transmission Line Inspection Robot during Flight Missions Using Improved NSGA-II" Applied Sciences 14, no. 4: 1637. https://doi.org/10.3390/app14041637
APA StyleWang, Y., Qin, X., Jia, W., Lei, J., Wang, D., Feng, T., Zeng, Y., & Song, J. (2024). Multiobjective Energy Consumption Optimization of a Flying–Walking Power Transmission Line Inspection Robot during Flight Missions Using Improved NSGA-II. Applied Sciences, 14(4), 1637. https://doi.org/10.3390/app14041637