Vehicle Trajectory Reconstruction Using Lagrange-Interpolation-Based Framework




Abstract
Featured Application
Abstract
1. Introduction
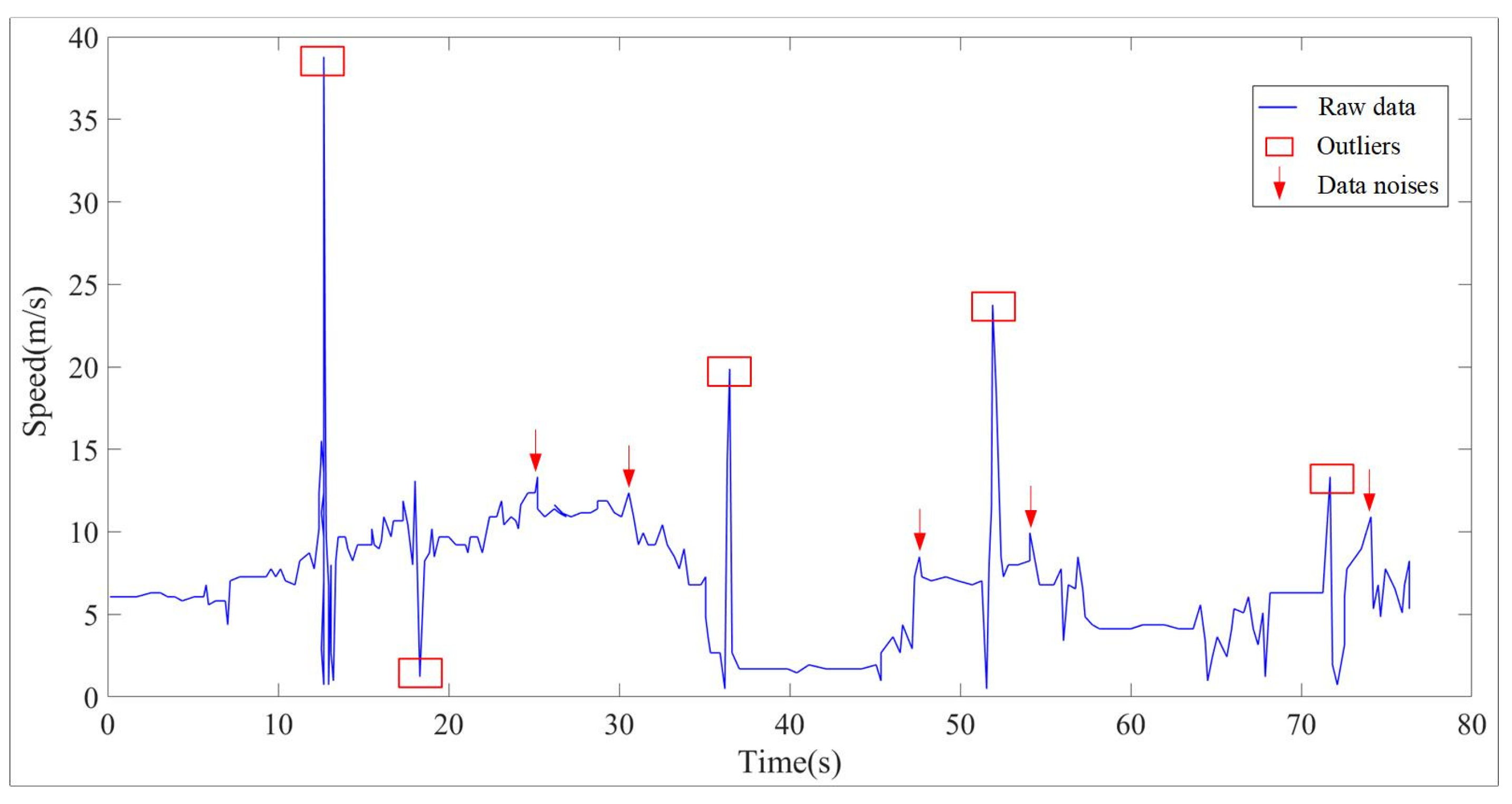
2. Problem Statement
3. Methodology
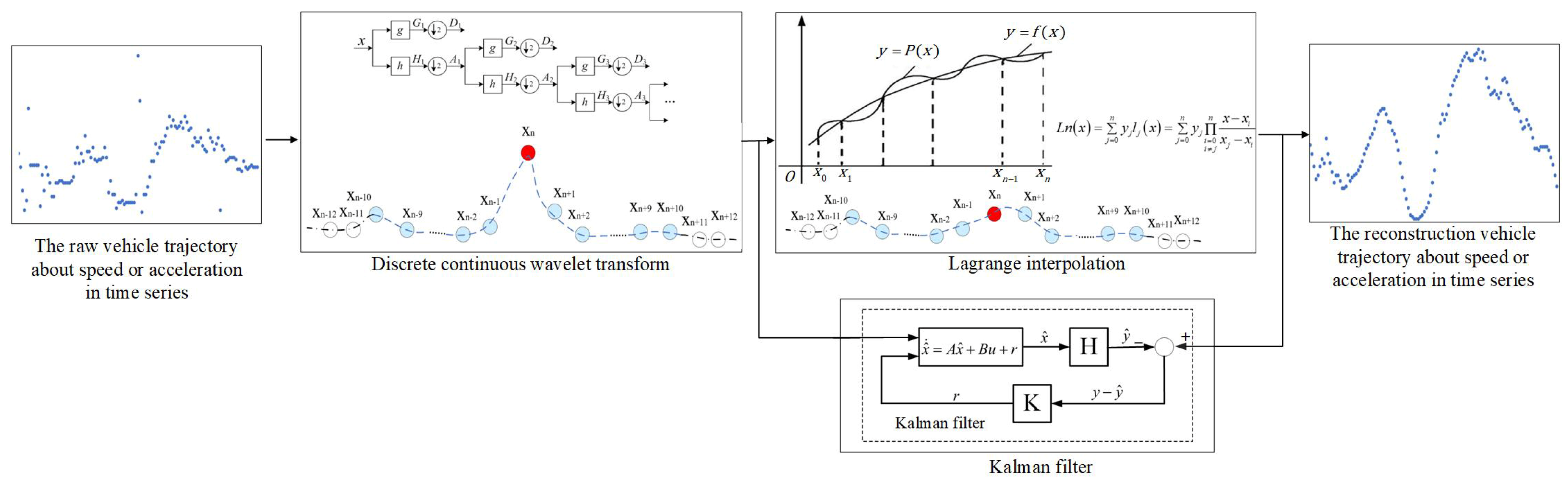
3.1. Method Framework for Vehicle Trajectory Reconstruction
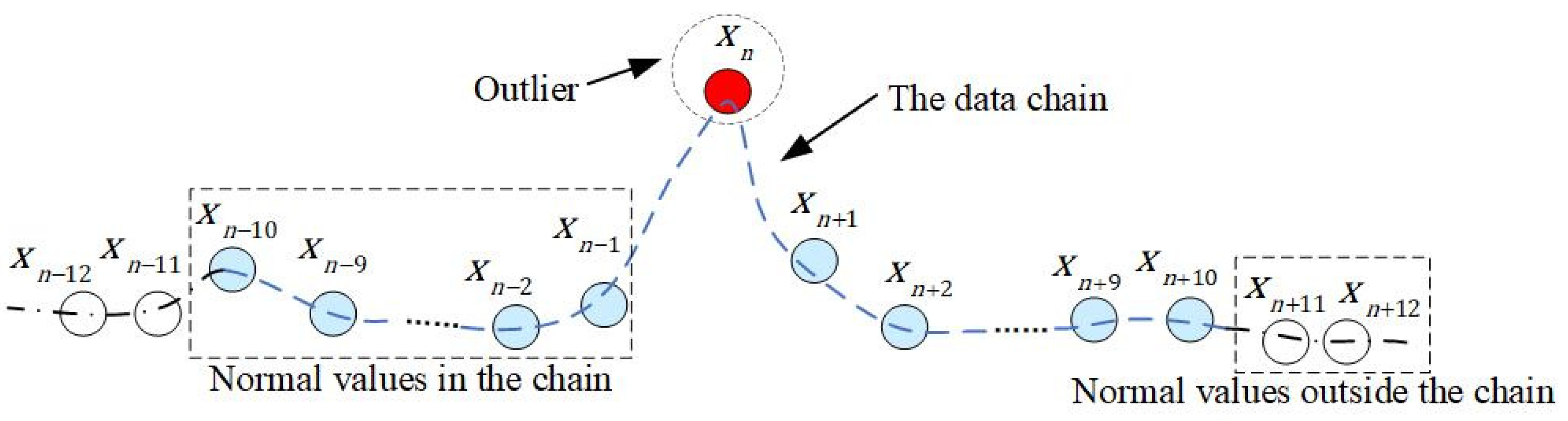
3.2. Outlier Detection
3.3. Lagrange Interpolation
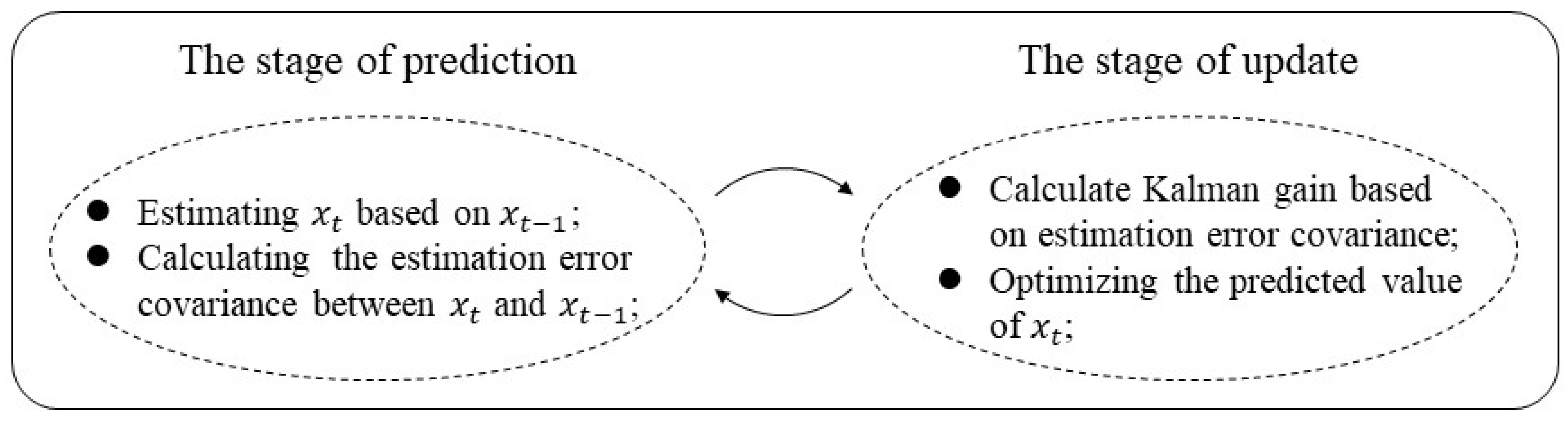
3.4. Filter Denoising
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kovvali, V.G.; Alexiadis, V.; Zhang, L. Video-based vehicle trajectory data collection. In Proceedings of the Transportation Research Board 86th Annual Meeting, Washington, DC, USA, 21–25 January 2007. No. 07-0528. [Google Scholar]
- Xie, K.; Ozbay, K.; Yang, H.; Li, C.G. Mining automatically extracted vehicle trajectory data for proactive safety analytics. Transp. Res. Part C Emerg. Technol. 2019, 106, 61–72. [Google Scholar] [CrossRef]
- Taylor, J.; Zhou, X.S.; Rouphail, N.M.; Porter, R.J. Method for investigating intradriver heterogeneity using vehicle trajectory data: A dynamic time warping approach. Transp. Res. Part B Methodol. 2015, 73, 59–80. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, S.; Li, L.; Li, L. Adaptive rolling smoothing with heterogeneous data for traffic state estimation and prediction. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1247–1258. [Google Scholar] [CrossRef]
- Li, T.; Han, X.; Ma, J. Cooperative perception for estimating and predicting microscopic traffic states to manage connected and automated traffic. IEEE Trans. Intell. Transp. Syst. 2021, 23, 13694–13707. [Google Scholar] [CrossRef]
- Tsanakas, N.; Ekström, J.; Olstam, J. Generating virtual vehicle trajectories for the estimation of emissions and fuel consumption. Transp. Res. Part C Emerg. Technol. 2022, 138, 103615. [Google Scholar] [CrossRef]
- Rempe, F.; Franeck, P.; Bogenberger, K. On the estimation of traffic speeds with deep convolutional neural networks given probe data. Transp. Res. Part C Emerg. Technol. 2022, 134, 103448. [Google Scholar] [CrossRef]
- Lu, X.Y.; Skabardonis, A. Freeway traffic shockwave analysis: Exploring the NGSIM trajectory data. In Proceedings of the 86th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 21–25 January 2007. [Google Scholar]
- Punzo, V.; Borzacchiello, M.T.; Ciuffo, B. On the assessment of vehicle trajectory data accuracy and application to the Next Generation SIMulation (NGSIM) program data. Transp. Res. Part C Emerg. Technol. 2011, 19, 1243–1262. [Google Scholar] [CrossRef]
- Coifman, B.; Li, L. A critical evaluation of the Next Generation Simulation (NGSIM) vehicle trajectory dataset. Transp. Res. Part B Methodol. 2017, 105, 362–377. [Google Scholar] [CrossRef]
- Thiemann, C.; Treiber, M.; Kesting, A. Estimating acceleration and lane-changing dynamics from next generation simulation trajectory data. Transp. Res. Rec. 2008, 2088, 90–101. [Google Scholar] [CrossRef]
- Ge, Y.; Xiong, H.; Zhou, Z.H.; Ozdemir, H.; Yu, J.; Lee, K.C. Top-eye: Top-k evolving trajectory outlier detection. In Proceedings of the 19th ACM International Conference on Information and Knowledge Management, Toronto, ON, Canada, 26–30 October 2010; pp. 1733–1736. [Google Scholar]
- Punzo, V.; Borzacchiello, M.T.; Ciuffo, B. Estimation of vehicle trajectories from observed discrete positions and next-generation simulation program (NGSIM) data. In Proceedings of the TRB 2009 Annual Meeting, Washington, DC, USA, 11–15 January 2009. [Google Scholar]
- Wang, H.; Gu, C.; Ochieng, W.Y. Vehicle trajectory reconstruction for signalized intersections with low-frequency floating car data. J. Adv. Transp. 2019, 2019, 9417471. [Google Scholar] [CrossRef]
- Venthuruthiyil, S.P.; Mallikarjuna, C.C. Vehicle path reconstruction using Recursively Ensembled Low-pass filter (RELP) and adaptive tri-cubic kernel smoother. Transp. Res. Part C Emerg. Technol. 2020, 120, 102847. [Google Scholar] [CrossRef]
- Zhou, Y.; Lin, Y.; Ahn, S.; Wang, P.; Wang, X. Platoon Trajectory Completion in a Mixed Traffic Environment Under Sparse Observation. IEEE Trans. Intell. Transp. Syst. 2022, 23, 16217–16226. [Google Scholar] [CrossRef]
- Hu, X.; Zheng, Z.; Chen, D.; Zhang, X.; Sun, J. Processing, assessing, and enhancing the Waymo autonomous vehicle open dataset for driving behavior research. Transp. Res. Part C Emerg. Technol. 2022, 134, 103490. [Google Scholar] [CrossRef]
- Zhou, T.; Jiang, D.; Lin, Z.; Han, G.; Xu, X.; Qin, J. Hybrid dual Kalman filtering model for short-term traffic flow forecasting. IET Intell. Transp. Syst. 2019, 13, 1023–1032. [Google Scholar] [CrossRef]
- Chen, Y.; Yu, P.; Chen, W.; Zheng, Z.; Guo, M. Embedding-based similarity computation for massive vehicle trajectory data. IEEE Internet Things J. 2021, 9, 4650–4660. [Google Scholar] [CrossRef]
- Belhadi, A.; Djenouri, Y.; Srivastava, G.; Cano, A.; Lin, J.C. Hybrid group anomaly detection for sequence data: Application to trajectory data analytics. IEEE Trans. Intell. Transp. Syst. 2021, 23, 9346–9357. [Google Scholar] [CrossRef]
- Sauer, T.; Xu, Y. On multivariate Lagrange interpolation. Math. Comput. 1995, 64, 1147–1170. [Google Scholar] [CrossRef]
- Liu, S.Y.; Liu, C.; Luo, Q.; Lionel, M.N.; Krishnan, R. Calibrating large scale vehicle trajectory data. In Proceedings of the 2012 IEEE 13th International Conference on Mobile Data Management, Bengaluru, India, 23–26 July 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 222–231. [Google Scholar]
- Wan, F.; Guo, G.; Zhang, C.; Guo, Q.; Liu, J. Outlier detection for monitoring data using stacked autoencoder. IEEE Access 2019, 7, 173827–173837. [Google Scholar] [CrossRef]
- Peralta, B.; Soria, R.; Nicolis, O.; Ruggeri, F.; Caro, L.; Bronfman, A. Outlier vehicle trajectory detection using deep autoencoders in Santiago, Chile. Sensors 2023, 23, 1440. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Yang, X.L.; Zhang, C. Vehicle trajectory reconstruction for intersections: An integrated wavelet transform and Savitzky-Golay filter approach. Transp. A Transp. Sci. 2023, 1–24. [Google Scholar] [CrossRef]
- Montanino, M.; Punzo, V. Trajectory data reconstruction and simulation-based validation against macroscopic traffic patterns. Transp. Res. Part B Methodol. 2015, 80, 82–106. [Google Scholar] [CrossRef]
- Wang, J.; Chai, R.; Xue, X. The effects of stop-and-go wave on the immediate follower and change in driver characteristics. Procedia Eng. 2016, 137, 289–298. [Google Scholar] [CrossRef]
- Fard, M.R.; Mohaymany, A.S.; Shahri, M. A new methodology for vehicle trajectory reconstruction based on wavelet analysis. Transp. Res. Part C Emerg. Technol. 2017, 74, 150–167. [Google Scholar] [CrossRef]
- Durrani, U.; Lee, C. Calibration and validation of psychophysical car-following model using driver’s action points and perception thresholds. J. Transp. Eng. Part A Syst. 2019, 145, 04019039. [Google Scholar] [CrossRef]
- Chen, X.; Chen, H.; Yang, Y.; Wu, H.; Zhang, W.; Zhao, J.; Xiong, Y. Traffic flow prediction by an ensemble framework with data denoising and deep learning model. Phys. A Stat. Mech. Its Appl. 2021, 565, 125574. [Google Scholar] [CrossRef]
- Nithin, M.; Panda, M. Multiple model filtering for vehicle trajectory tracking with adaptive noise covariances. In Proceedings of the Intelligent Computing, Information and Control Systems: ICICCS 2019, Secunderabad, India, 27–28 June 2019; Springer International Publishing: Cham, Switzerland, 2020; pp. 557–565. [Google Scholar]
- Mahajan, V.; Barmpounakis, E.; Alam, M.R.; Geroliminis, N.; Antoniou, C. Treating Noise and Anomalies in Vehicle Trajectories From an Experiment With a Swarm of Drones. IEEE Trans. Intell. Transp. Syst. 2023, 24, 9055–9067. [Google Scholar] [CrossRef]
- Abbas, M.T.; Jibran, M.A.; Afaq, M.; Song, W.C. An adaptive approach to vehicle trajectory prediction using multimodel Kalman filter. Trans. Emerg. Telecommun. Technol. 2020, 31, e3734. [Google Scholar] [CrossRef]
- Zhang, B.W.; Yu, W.G.; Jia, Y.F.; Huang, J.; Yang, D.G.; Zhong, Z.H. Predicting vehicle trajectory via combination of model-based and data-driven methods using Kalman filter. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2023, 09544070231161846. [Google Scholar] [CrossRef]
- Zhao, S.; Chen, W.; Deng, Z.; Liu, W. Trajectory tracking control for intelligent vehicles driving in curved road based on expanded state observers. J. Automot. Saf. Energy 2022, 13, 112. [Google Scholar]
- Hendawi, A.; Shen, J.; Sabbineni, S.; Song, Y.X.; Cao, P.W.; Zhang, Z.; Krumm, J.; Ali, M. Noise patterns in GPS trajectories. In Proceedings of the 2020 21st IEEE International Conference on Mobile Data Management (MDM), Versailles, France, 30 June–3 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 178–185. [Google Scholar]
- Montanino, M.; Punzo, V. Making NGSIM data usable for studies on traffic flow theory: Multistep method for vehicle trajectory reconstruction. Transp. Res. Rec. 2013, 2390, 99–111. [Google Scholar] [CrossRef]
- Addison, P.S. The Illustrated Wavelet Transform Handbook: Introductory Theory and Applications in Science, Engineering, Medicine and Finance; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Van, M.P. Hermite interpolation on the unit sphere and limits of Lagrange projectors. IMA J. Numer. Anal. 2021, 41, 1441–1464. [Google Scholar]
- Welch, G.F. Kalman filter. In Computer Vision: A Reference Guide; Springer: Cham, Switzerland, 2020; pp. 1–3. [Google Scholar]
- Zhao, J.; Victor, L.K.; Sun, J.; Ma, Z.; Wang, M. Unprotected Left-Turn Behavior Model Capturing Path Variations at Intersections. IEEE Trans. Intell. Transp. Syst. 2023, 24, 9016–9030. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence Number | 518 | 519 | 520 | 521 | 522 |
|---|---|---|---|---|---|
| Speed (m/s) | 0 | 0 | 22.68 | 18.62 | 10.63 |
| Index | Baseline Method | Proposed Method | |
|---|---|---|---|
| RMSE | Position | 0.05 | 0.035 |
| Speed | 0.08 | 0.05 | |
| Acceleration | 0.43 | 0.13 | |
| SNR | Position | 75.13 | 79.22 |
| Speed | 36.8 | 44.7 | |
| Acceleration | 8.4 | 12.8 | |
| P | Position | 1.00 | 1.00 |
| Speed | 1.00 | 1.00 | |
| Acceleration | 0.77 | 0.967 | |
| Index | Original Trajectory | Baseline Method | Proposed Method | |
|---|---|---|---|---|
| Jerk is greater than ±15 m/s3(%) | mean value | 22.93 | 0.04 | 0.03 |
| standard deviation | 11.22 | 0.05 | 0.23 | |
| range | [4.70, 69.23] | [0.00, 1.75] | [0.00, 4.32] | |
| Maximum jerk | mean value | 832.16 | 33.14 | 16.83 |
| standard deviation | 712.33 | 36.21 | 13.36 | |
| range | [36.33, 8326.91] | [3.96, 193.63] | [0.93, 169.65] | |
| Minimum jerk | mean value | −978.62 | −42.12 | −13.26 |
| standard deviation | 1021.36 | 25.69 | 6.74 | |
| range | [−8795.41, −36.85] | [−121.16, −65.36] | [−86.52, −1.36] | |
| N | mean value | 56.32 | 13.65 | 7.49 |
| standard deviation | 9.32 | 7.41 | 6.34 | |
| range | [42.75, 63.26] | [22.69, 43.77] | [12.34, 37.69] | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Liang, Y.; Tang, J.; Wu, Z. Vehicle Trajectory Reconstruction Using Lagrange-Interpolation-Based Framework. Appl. Sci. 2024, 14, 1173. https://doi.org/10.3390/app14031173
Wang J, Liang Y, Tang J, Wu Z. Vehicle Trajectory Reconstruction Using Lagrange-Interpolation-Based Framework. Applied Sciences. 2024; 14(3):1173. https://doi.org/10.3390/app14031173
Chicago/Turabian StyleWang, Jizhao, Yunyi Liang, Jinjun Tang, and Zhizhou Wu. 2024. "Vehicle Trajectory Reconstruction Using Lagrange-Interpolation-Based Framework" Applied Sciences 14, no. 3: 1173. https://doi.org/10.3390/app14031173
APA StyleWang, J., Liang, Y., Tang, J., & Wu, Z. (2024). Vehicle Trajectory Reconstruction Using Lagrange-Interpolation-Based Framework. Applied Sciences, 14(3), 1173. https://doi.org/10.3390/app14031173