
From Route Structure to Human Factors: A Comprehensive Study of Safe Separation on Intersecting Air Routes


Abstract
1. Introduction
1.1. Background
1.2. Literature Review
- (1)
- Collision: during flight, when the real distance between aircraft in the longitudinal, lateral, and vertical direction is smaller than the size of the aircraft, resulting in an overlap of occupied space.
- (2)
- Safe Separation: the minimum distance corresponding to a given distance between the leading aircraft and the intersection, which the trailing aircraft maintains to reduce the likelihood of mutual collision so that the risk of collision is below the acceptable TLS.
1.3. Contribution of This Work
- (1)
- First, we integrate real-time data from the flight process and use the positional error method to analyze the operational characteristics of the aircraft, incorporating these characteristics as key parameters into subsequent simulations;
- (2)
- Next, we analyze the characteristics of controller thinking and reaction, communication, pilot response, and aircraft maneuvering behavior during human-operated adjustment scenarios in air route operations, to understand the time required for the entire human-operated adjustment process;
- (3)
- Finally, we use the Monte Carlo method to simulate collision risks under different parameters for real air route configurations and provide corresponding safe separation.
2. Distribution of the Distance between the Trailing Aircraft and the Leading Aircraft When the Latter Is Positioned at the Intersection
2.1. Distribution of Positional Errors
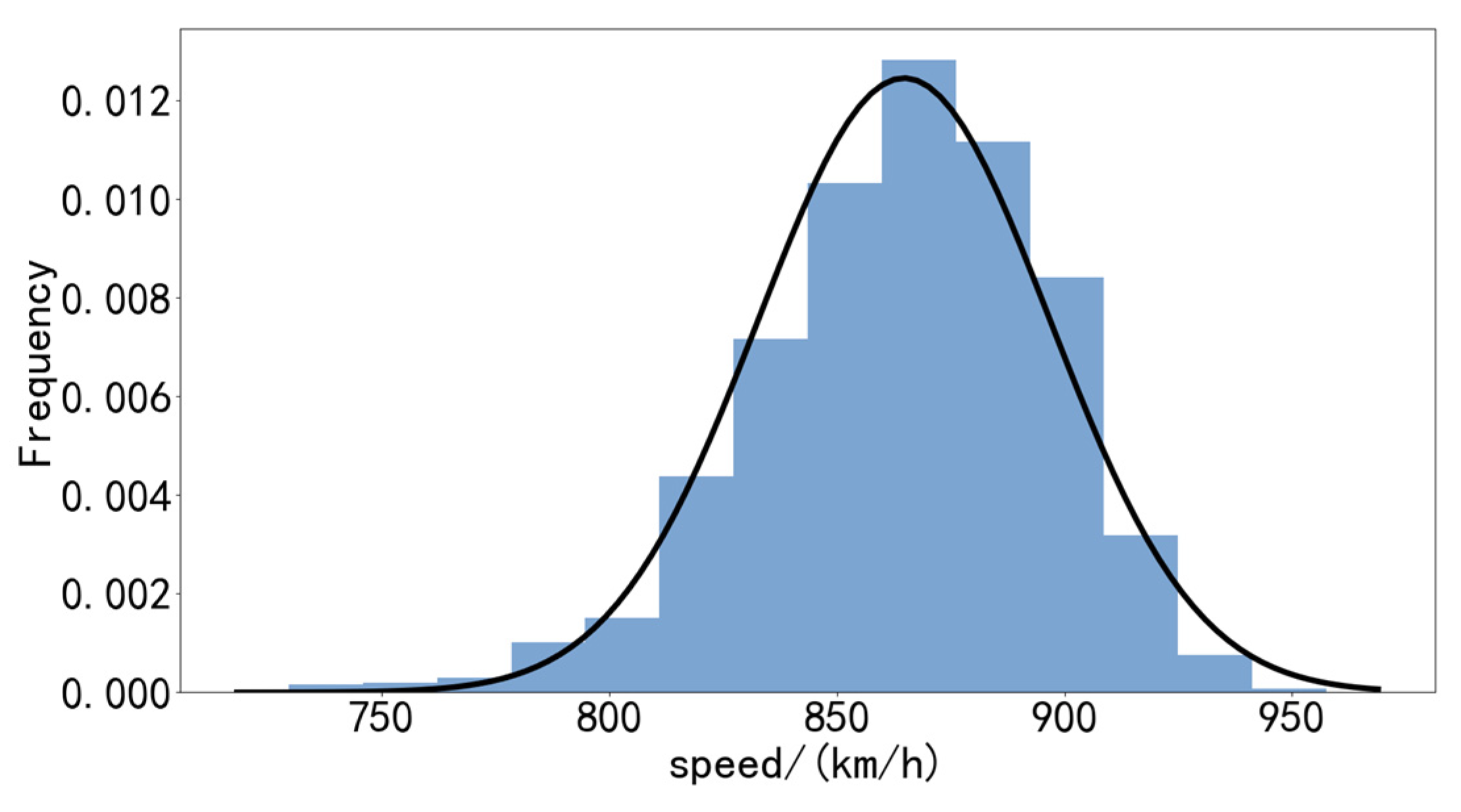
2.2. Distribution of Speeds
3. Collision Risk Model
3.1. Human-Operated Adjustment
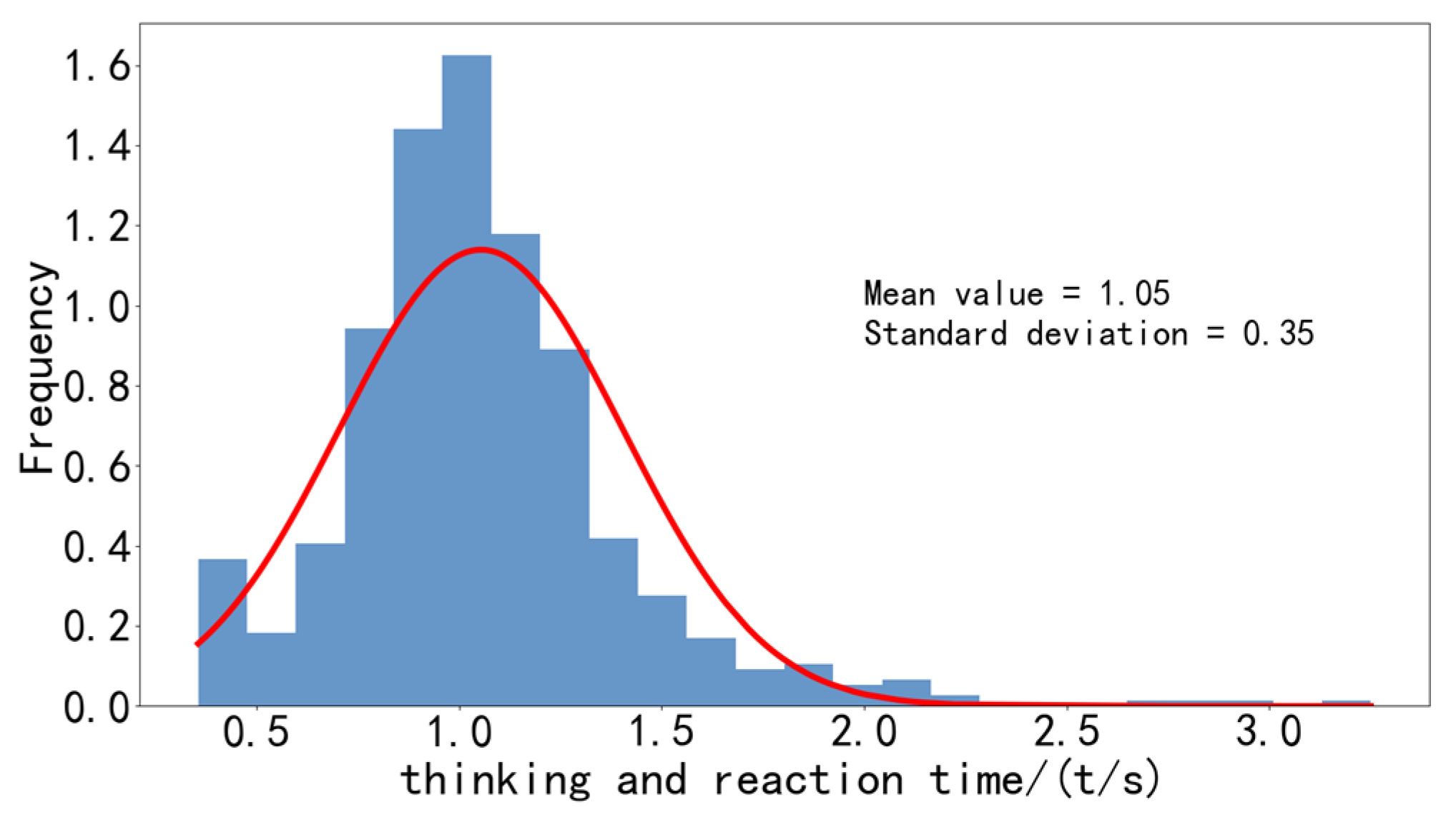
3.1.1. Controller Thinking and Reaction Time
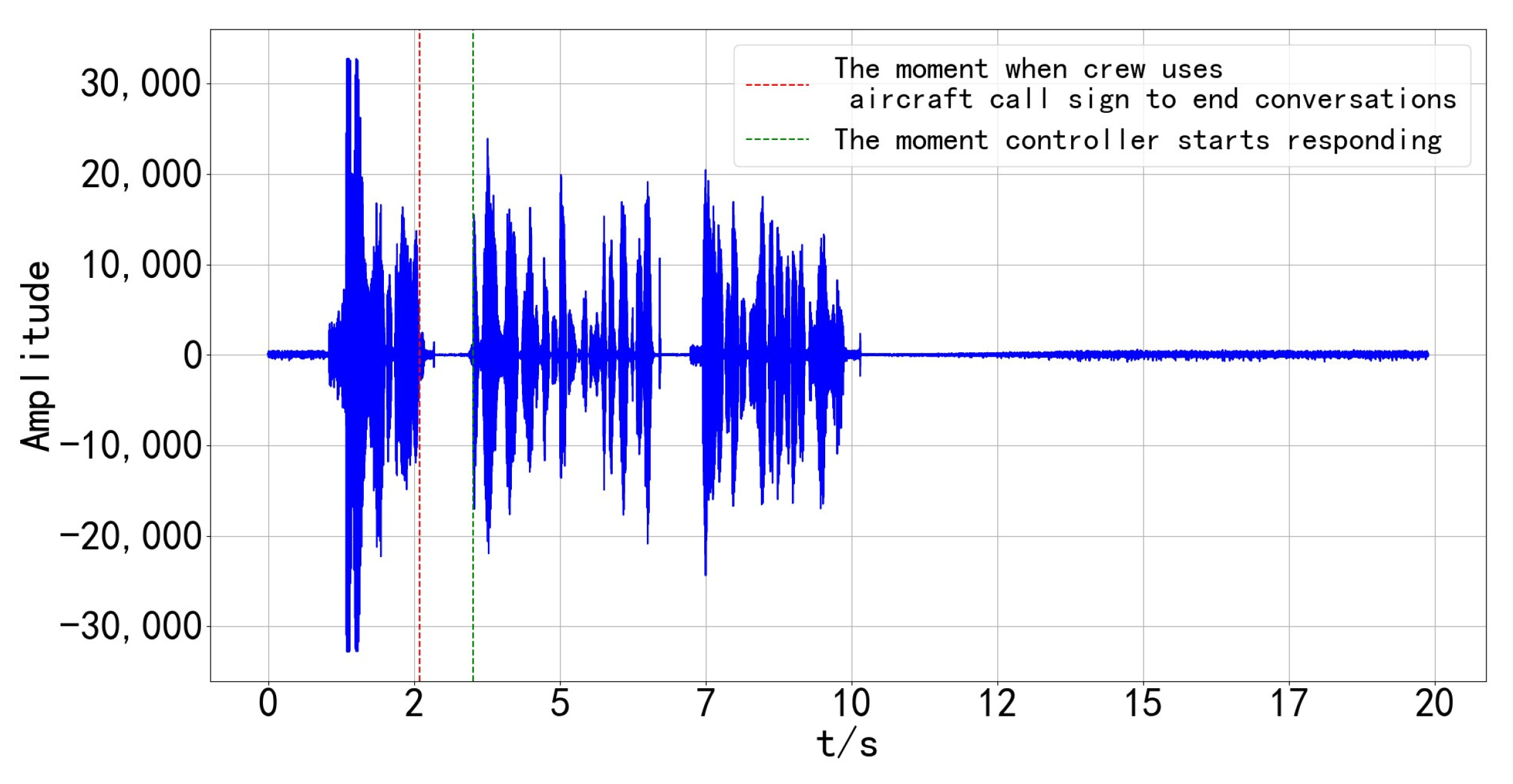
3.1.2. Communication Time
3.1.3. Pilot Reaction Time and Aircraft Maneuvering Time
3.2. Collision Risk Model Considering Human Factors
4. Monte Carlo Simulation
4.1. Introduction to Monte Carlo
- (1)
- Scenario modeling: Initially, the collision issue is transformed into a mathematical model, with the definition of key parameters and variables such as aircraft position, speed, and flight path;
- (2)
- Random sampling: Reflecting the operational characteristics of aircraft on intersecting routes, numerous random samples representing various operational scenarios are generated. These primarily include variables like the initial aircraft distance and speed alterations;
- (3)
- Collision simulation: The random samples are then applied to the mathematical model to simulate potential collisions. For each sample, the model calculates the distance between aircraft, determining collision likelihood based on the minimum distance and the collision boundary ;
- (4)
- Statistical analysis: Results from these simulations are statistically analyzed to ascertain the collision probability. This analysis is further integrated with the TLS, evaluating the risk of collisions on intersecting routes and assessing compliance with required safety standards.
4.2. Monte Carlo: Results and Discussion
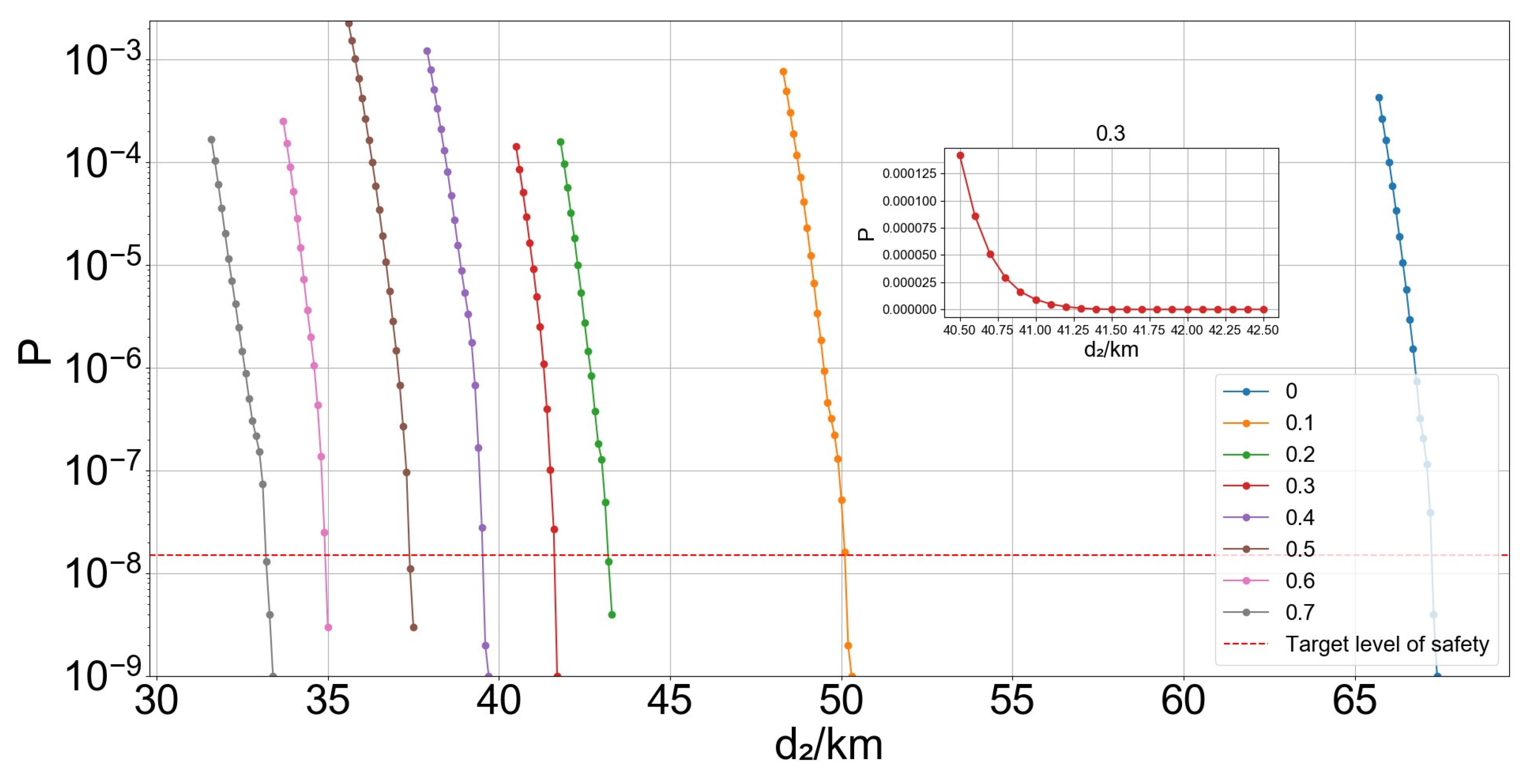
4.2.1. Analysis of Position Error Parameters
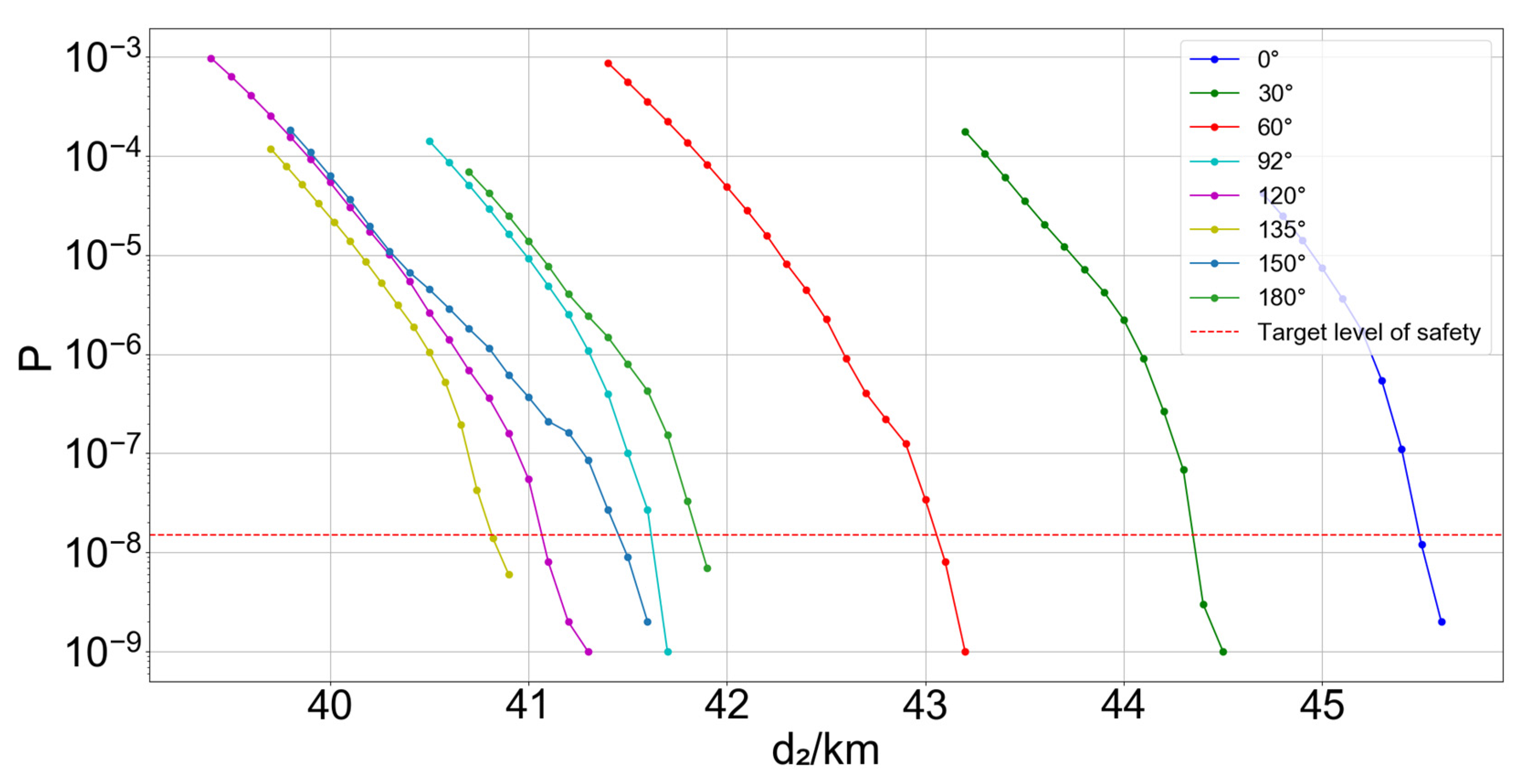
4.2.2. Analysis of Magnetic Courses
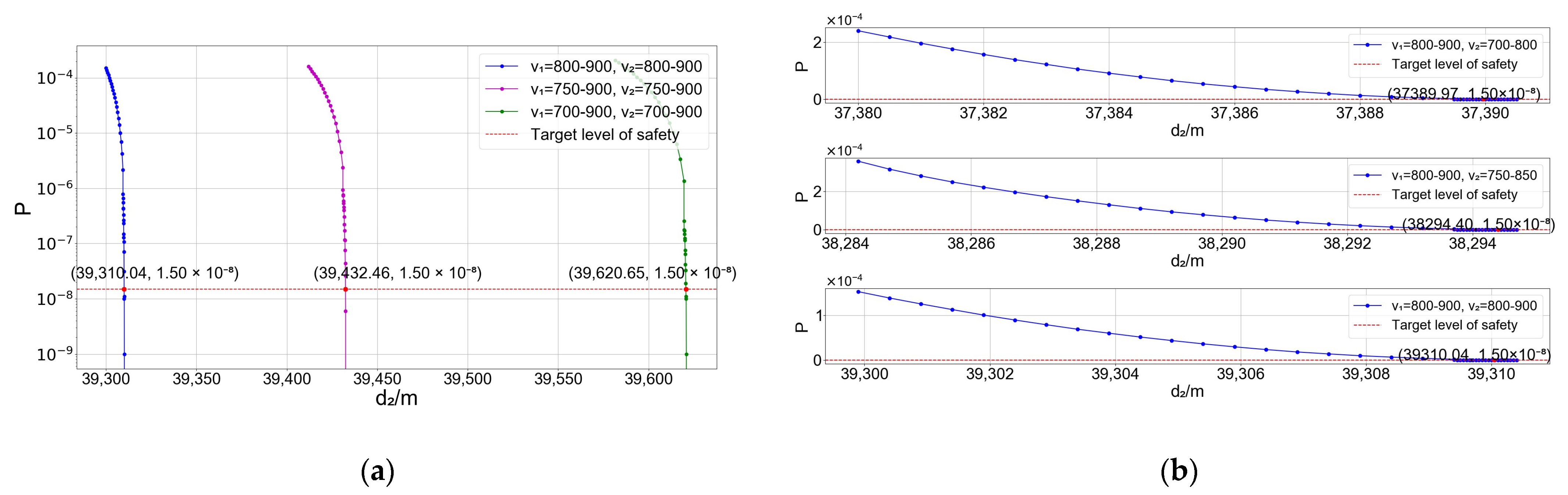
4.2.3. Analysis of Velocity Parameters
- Normal distribution
- Uniform distribution
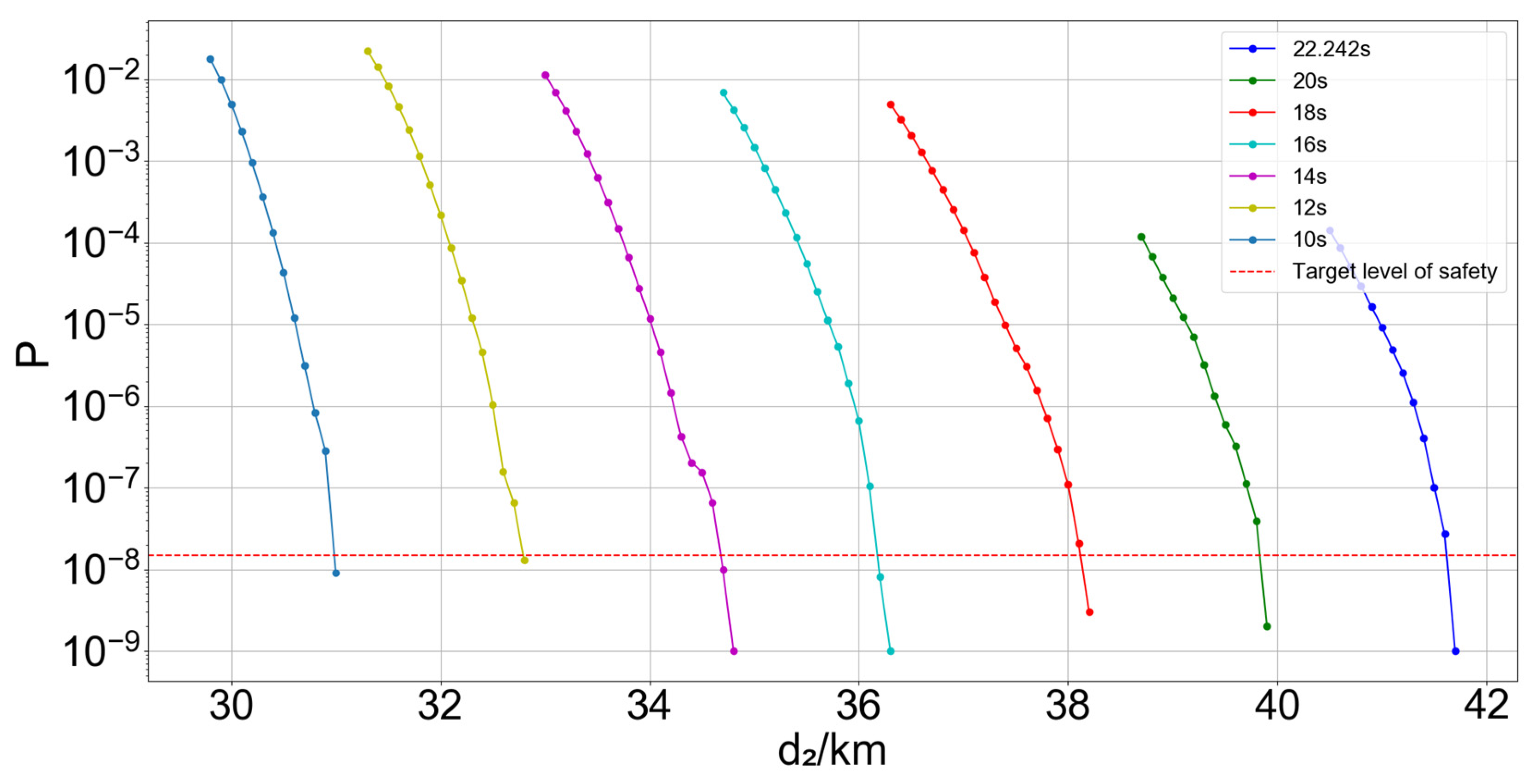
4.2.4. Analysis of Overall Time Spent on Human-Operated Adjustment
5. Conclusions
- (1)
- By simulating variations in the angles of each magnetic course, it was found that: as the angle θ of the two aircraft heading towards the intersection keeps increasing, the collision risk decreases and then increases, and is minimized at about 135°. When the leading aircraft is heading away from the intersection, the smaller the projected angle of the trailing aircraft on its route is, the higher the collision risk. Taken together, when the two take larger values, the corresponding collision risk is relatively smaller, i.e., the trailing aircraft needs to maintain a smaller safe separation from the intersection to meet the existing TLS;
- (2)
- Minimizing both position and speed errors in aircraft is crucial, as this not only reduces the need for safe separation but also leads to a more controllable operational process;
- (3)
- The simulation results for safe separation are influenced by the characteristics of the speed distribution. This study used real operational data to simulate both normal and uniform distributions, finding that the rate of change in collision risk was greater with the uniform distribution, largely due to its higher proportion of tail data. The inverse transformation method can be used to generate random numbers for simulating collision risk under different speed distributions on intersecting routes, which can contribute to enhancing air traffic management and flight safety;
- (4)
- In response to different human-operated adjustment times, as the time shortens, the required safe separation correspondingly decreases. This situation places higher demands on the qualities of both air traffic controllers and pilots. They need to not only possess solid professional knowledge but also exceptional emergency handling capabilities. To ensure flight safety by quickly and accurately assessing situations and taking appropriate measures in emergencies, the following measures can be implemented:
- Enhance Professional Training: conduct regular and comprehensive training for air traffic controllers and pilots, such as updating them on the latest aviation regulations, the use of advanced technologies, and the development of emergency handling skills. This ensures that they can make quick and accurate decisions in emergency situations;
- Emphasize Language Training: especially in the international aviation sector, where English is the universal language of aviation, it is crucial to focus on the English communication skills of controllers and pilots to ensure effective communication on international routes. Additionally, considering the importance of native languages, it is advisable to encourage and support the use of native languages for communication wherever possible. This can further improve the accuracy and efficiency of information transmission;
- Upgrade Technical Support: continually update aviation management systems and tools, such as automated conflict detection and resolution systems. These enhancements can significantly improve the efficiency of controllers and pilots in managing safety. These systems are capable of real-time monitoring of flight paths, predicting potential conflicts and risks, thereby allowing controllers and pilots to take preventive actions to avoid accidents.
- (1)
- Optimizing airspace traffic allocation: Utilizing the results of safe separation calculations helps to manage air traffic flow more efficiently. This reduces congestion on air routes, enhances overall efficiency in airspace operations, and optimizes the allocation of traffic within the airspace;
- (2)
- Supporting the implementation of new air traffic management technologies: In the realm of new air traffic management technologies, such as automation, advanced navigation systems, and communication technologies, determining safe separation is crucial. It provides a theoretical foundation for the application of these new technologies, ensuring their safety and feasibility;
- (3)
- Enhancing airspace utilization efficiency: Through precise assessment of collision risks, there is an opportunity to more effectively utilize airspace, increase traffic flow, expand network capacity, and align it with the capabilities of air transportation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- National Transportation Safety Board. Aircraft Accident Report: Hughes Air West DC-9, N9345 and U.S. Marine Corps F-4B, 151458 near Duarte, California, 6 June 1971. Available online: https://www.ntsb.gov/investigations/AccidentReports/Reports/AAR7226.pdf (accessed on 5 January 2024).
- Reich, P.G. Analysis of long-range air traffic systems: Separation standards—I. J. Navig. 1966, 19, 88–98. [Google Scholar] [CrossRef]
- Brooker, P. Aircraft collision risk in the North Atlantic region. J. Oper. Res. Soc. 1984, 35, 695–703. [Google Scholar] [CrossRef]
- Shin, D.W.; Kim, S.K. The Study on RVSM Safety Assessment of Incheon FIR. J. Korean Soc. Aviat. Aeronaut. 2006, 14, 49–54. [Google Scholar]
- Zhang, Z.N.; Zhang, X.Y.; Li, D.B. Computation model of lateral collision rate on parallel routes based on VOR navigation. J. Traffic Transp. Eng. 2007, 7, 21–24. [Google Scholar]
- Siddiqee, W. A mathematical model for predicting the number of potential conflict situations at intersecting air routes. Transp. Sci. 1973, 7, 158–167. [Google Scholar] [CrossRef]
- Siddiqee, W. A mathematical model for predicting the duration of potential conflict situations at intersecting air routes. Transp. Sci. 1974, 8, 58–64. [Google Scholar] [CrossRef]
- Anderson, D.; Lin, X.G. A collision risk model for a crossin track separation methodology. J. Navig. 1996, 49, 337–349. [Google Scholar] [CrossRef]
- Han, S.C.; Qu, Y.L.; Sun, F.R.; Zhu, X.P. Collision risk model around intersection of airways. J. Southwest Jiaotong Univ. 2013, 26, 383–389. [Google Scholar]
- Novak, A.; Havel, K.; Adamko, P. Number of conflicts at the route intersection--minimum distance model. Aviation 2019, 23, 1–6. [Google Scholar] [CrossRef]
- Bakker, G.J.; Blom, H.A.P. Air traffic collision risk modelling. In Proceedings of the 32nd IEEE Conference on Decision and Control, San Antonio, TX, USA, 15–17 December 1993; IEEE: San Antonio, TX, USA, 1993; pp. 1464–1469. [Google Scholar]
- Blom, H.A.P.; Bakker, G.J.; Everdij, M.; van der Park, M. Collision risk modeling of air traffic. In Proceedings of the 2003 European Control Conference (ECC), Cambridge, UK, 1–4 September 2003; IEEE: Cambridge, UK, 2003; pp. 2236–2241. [Google Scholar]
- Cassell, R.; Smith, A.; Shepherd, R. A risk assessment model for free flight-terminal area reduced separation. In Proceedings of the 15th DASC. AIAA/IEEE Digital Avionics Systems Conference, Atlanta, GA, USA, 31–31 October 1996; IEEE: Atlanta, GA, USA, 1996; pp. 73–80. [Google Scholar]
- Swaminathan, S.; Smidts, C. The event sequence diagram framework for dynamic probabilistic risk assessment. Reliab. Eng. Syst. Saf. 1999, 63, 73–90. [Google Scholar] [CrossRef]
- Noh, S.; Shortle, J. Dynamic Event Tree Framework to Assess Collision Risk between Various Aircraft Types. In Proceedings of the 2020 Integrated Communications Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 8–10 September 2020; IEEE: Herndon, VA, USA, 2020; pp. 2F1-1–2F1-13. [Google Scholar]
- Ale, B.J.M.; Bellamy, L.J.; Cooke, R.M.; Goossens, L.H.J.; Hale, A.R.; Roelen, A.L.C.; Smith, E. Towards a causal model for air transport safety—An ongoing research project. Saf. Sci. 2006, 44, 657–673. [Google Scholar] [CrossRef]
- Brooker, P. Lateral collision risk in air traffic track systems: A ‘post-Reich’event model. J. Navig. 2003, 56, 399–409. [Google Scholar] [CrossRef]
- Cai, Q.; Ang, H.J.; Alam, S. Collision risk assessment of reduced aircraft separation minima in procedural airspace using advanced communication and navigation. Chin. J. Aeronaut. 2023, 36, 315–337. [Google Scholar] [CrossRef]
- Liu, H.; Zhu, D.W.; Xie, X.F.; Chen, J.H.; Liu, X.K. Optimization of Lateral Collision Risk of Aircraft Based on the Skid-Slip Event Model. Int. J. Aerosp. Eng. 2022, 2022, 1–11. [Google Scholar] [CrossRef]
- Blom, H.A.P.; Krystul, J.; Bakker, G.J. Free flight collision risk estimation by sequential MC simulation. In Stochastic Hybrid Systems, Cassandras, C.G., Lygeros, J., Eds.; CRC Press (Taylor & Francis): Boca Raton, FL, USA, 2006; pp. 247–279. [Google Scholar]
- Kochenderfer, M.J.; Griffith, J.D.; Holland, J.E. On estimating mid-air collision risk. In Proceedings of the 10th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, Fort Worth, Texas, USA, 13–15 September 2010; AIAA: Fort Worth, TX, USA, 2010. [Google Scholar]
- Thipphavong, D. Accelerated Monte Carlo simulation for safety analysis of the advanced airspace concept. In Proceedings of the 10th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, Fort Worth, Texas, USA, 13–15 September 2010; AIAA: Fort Worth, TX, USA, 2010. [Google Scholar]
- Zhang, Z.N.; Liu, J.M.; Wang, L.L. Assessment of Longitudinal Collision Risk on Parallel Routes Based on Communication, Navigation and Surveillance Performances. J. Southwest Jiaotong Univ. 2009, 44, 918–925. [Google Scholar]
- Lu, F.; Chen, Z.C.; Chen, H.Y. Lateral collision risk assessment of parallel routes in ocean area based on space-based ADS-B. Transp. Res. Part C Emerg. Technol. 2021, 124, 102970. [Google Scholar] [CrossRef]
- Lu, F.; Zhang, Z.N.; Wei, Z.Q.; Liu, B.L. Longitudinal collision risk safety assessment of paired approach to closed spaced parallel runways. China Saf. Sci. J. 2013, 23, 108–113. [Google Scholar]
- Hsu, D.A. The evaluation of aircraft collision probabilities at intersecting air routes. J. Navig. 1981, 34, 78–102. [Google Scholar] [CrossRef]
- Stroeve, S.H.; Blom, H.A.P.; Bakker, G.J. Systemic accident risk assessment in air traffic by Monte Carlo simulation. Saf. Sci. 2009, 47, 238–249. [Google Scholar] [CrossRef]
- Zhang, Y.M.; Shortle, J.; Sherry, L. Methodology for collision risk assessment of an airspace flow corridor concept. Reliab. Eng. Syst. Saf. 2015, 142, 444–455. [Google Scholar] [CrossRef]
- Wang, C.; Li, Y.K.; Li, H.Y. Collision risk analysis of parallel runway approach based on Monte Carlo. J. Saf. Environ. 2023, 23, 659–666. [Google Scholar]
- Hinkley, D.V. On the ratio of two correlated normal random variables. Biometrika 1969, 56, 635–639. [Google Scholar] [CrossRef]
- Mosquera-Benitez, D.; Groskreutz, A.R.; Fucke, L. Separation minima model: How changes in contributing factors could affect current standards. In Proceedings of the 8th USA/Europe Air Traffic Management Research and Development Seminar 2009, Napa, CA, USA, 29 June–2 July 2009; Curran Associates, Inc.: Napa, CA, USA, 2009; pp. 334–342. [Google Scholar]
- Sun, R.S.; Chen, Y.F.; Liu, X.Y.; Peng, T.C.; Liu, L. A method of analysis integrating HCR and ETA modeling for determining risks associated with inadequate flight separation events. J. Aviat. Technol. Eng. 2011, 1, 19–27. [Google Scholar] [CrossRef]
- Li, D.B.; Xu, X.H.; Li, X. Target level of safety for Chinese airspace. Saf. Sci. 2009, 47, 421–424. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Author | Year | Application Scenario | Main Contribution |
|---|---|---|---|---|
| Reich model | Reich [2] | 1996 | Parallel air routes over the North Atlantic | For lateral, longitudinal, and vertical collision risk assessment, addressing the safety evaluation of flight separation. |
| Hsu [26] | 1981 | Intersecting air routes | Calculating the collision probability for intersecting air routes using a cylindrical template. | |
| Brooker [3] | 1984 | Parallel air routes over the North Atlantic | Reducing the lateral separation from 120 nautical miles to 60 nautical miles. | |
| Shin [4] | 2006 | Incheon FIR | Assessing collision risk. | |
| Zhang [5] | 2007 | Parallel air routes under VOR navigation in continental areas | Using the Reich model and probability theory to establish a lateral collision calculation model. | |
| Conflict area model | Siddiqee [6,7] | 1973,1974 | Intersecting air routes | Developing a mathematical model of intersection capacity. |
| Anderson [8] | 1996 | Intersecting air routes | Providing an assessment of collision risk for intersecting air routes using the conflict area model. | |
| Songchen [9] | 2013 | Intersecting air routes | Proposing a method for assessing collision risk at intersecting air routes, where the nominal distance varies over time. | |
| Novak [10] | 2019 | Intersecting air routes | Comparing multiple parameters under different air route intersection configurations to assess the operational safety of aircraft at intersections. | |
| Stochastic Process method | Bakker [11] | 1993 | Arbitrary 3D air route network | Using the method of transient boundaries to solve partial differential equations, providing a numerical assessment model for collision risk. |
| Blom [12] | 2003 | Mid-air collision between aircraft | Introducing stochastic differential equations (SDE) with switch coefficients. | |
| System analysis method | Cassell [13] | 1996 | Terminal area | RASRAM provides a framework for evaluating different technologies and their impact on the safety. |
| Swaminathan [14] | 1999 | Aircraft icing | The ESD (Event Sequence Diagram) of Markov processes can handle scenarios ranging from purely static to fully dynamic. | |
| Ale [16] | 2006 | Sub-selections of the aviation world | Developing a full operational causal model using fault tree and BBN methods. | |
| Noh [15] | 2020 | Airspace | Evaluating collision risk in airspace with different aircraft types and collision avoidance capabilities using dynamic event trees. | |
| EVENT model | Brooker [17] | 2003 | Parallel air routes | Focusing on flights that deviate significantly from their planned flight paths, from an event perspective. |
| Liu [19] | 2022 | Cruising level flight | Upgrading the collision template to an ellipsoid, proposing an aircraft lateral conflict resolution model based on the TSRRT algorithm. | |
| Qing [18] | 2023 | Singapore’s airspace | Establish longitudinal risk based on a new intervention model. | |
| Monte Carlo simulation method | Blom [20] | 2007 | Free flight | Creating a Monte Carlo simulation model using stochastic and dynamic colored Petri nets. |
| Stroeve [27] | 2009 | Runway incursion | Based on dynamic multi-agent models, representing the distributed and dynamic interactions of various human operators and technical systems in a safety relevant scenario. | |
| Thipphavong [22] | 2010 | Advanced airspace concept | Developing an accelerated Monte Carlo method that combines features of fault trees and standard Monte Carlo methods. | |
| Zhang [28] | 2015 | Flight corridors | Introducing the concept of flow corridors, combined with Monte Carlo simulation and dynamic event trees to assess related collision risks. | |
| Wang [29] | 2023 | Parallel runway approach | Constructing an approach collision risk simulation model oriented towards multiple object sets. | |
| Position error method | Zhang [23] | 2009 | Parallel air routes | Taking into account positioning errors in a radar-controlled environment. |
| Lu [25] | 2013 | Closed spaced parallel runways paired approach | Establishing a longitudinal collision risk assessment model based on positional error distribution and wake turbulence avoidance requirements. | |
| Lu [24] | 2021 | Parallel routes in ocean area | Processing positional errors categorically, and using Bayesian networks to assess collision risk on maritime parallel air routes. |
| 0.7 | 0.6 | 0.5 | 0.4 | 0.3 | 0.2 | 0.1 | 0 | |
|---|---|---|---|---|---|---|---|---|
| Mean value/m | 211.3 | 505.38 | 851.3 | 1323.84 | 1958.03 | 2674.34 | 3068.27 | 3694.65 |
| Standard deviation/m | 853.91 | 1499.54 | 2231.51 | 2968.04 | 3774.14 | 4429.86 | 6224.30 | 10,598.61 |
| Aircraft Models | A359 | A320 | A333 | B738 | A321 | A332 | 737 | B735 |
|---|---|---|---|---|---|---|---|---|
| Proportions | 0.088 | 0.408 | 0.08 | 0.102 | 0.157 | 0.08 | 0.011 | 0.074 |
| Fuselage length/m | 66.8 | 35.57 | 63.66 | 39.5 | 44.51 | 58.82 | 33.6 | 31.1 |
| Wingspan width/m | 64.75 | 35.8 | 60.3 | 35.8 | 35.8 | 60.3 | 34.3 | 28.9 |
| 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | |
|---|---|---|---|---|---|---|---|---|
| D2 (km) | 67.269 | 50.107 | 43.194 | 41.646 | 39.548 | 37.395 | 34.945 | 33.197 |
| 6 | 14 | 26 | 34 | 63 | 86 | 116 | 146 | |
|---|---|---|---|---|---|---|---|---|
| 40 | 20 | 60 | 0 | 97 | 120 | 150 | 180 | |
| D2 (km) | 181.889 | 156.857 | 71.270 | 68.608 | 41.646 | 35.382 | 29.963 | 26.355 |
| 0 | 30 | 60 | 92 | 120 | 135 | 150 | 180 | |
|---|---|---|---|---|---|---|---|---|
| D2 (km) | 45.497 | 44.382 | 43.073 | 41.646 | 41.085 | 40.917 | 41.467 | 41.869 |
| 120 | 150 | 180 | 210 | 240 | 270 | 300 | 330 | 360 | |
|---|---|---|---|---|---|---|---|---|---|
| 157 | 127 | 97 | 67 | 37 | 7 | 23 | 53 | 83 | |
| 186 | 156 | 126 | 96 | 66 | 36 | 6 | 24 | 54 | |
| D2 (km) | 25.888 | 27.881 | 32.285 | 40.389 | 58.28 | 169.048 | 99.073 | 54.225 | 42.537 |
| Overall Time Spent on Human-Operated Adjustment (s) | 10 | 12 | 14 | 16 | 18 | 20 | 22.242 |
|---|---|---|---|---|---|---|---|
| D2 (km) | 30.998 | 32.796 | 34.691 | 36.193 | 38.133 | 39.865 | 41.646 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, F.; Wang, T.; Zhang, Z. From Route Structure to Human Factors: A Comprehensive Study of Safe Separation on Intersecting Air Routes. Appl. Sci. 2024, 14, 1089. https://doi.org/10.3390/app14031089
Lu F, Wang T, Zhang Z. From Route Structure to Human Factors: A Comprehensive Study of Safe Separation on Intersecting Air Routes. Applied Sciences. 2024; 14(3):1089. https://doi.org/10.3390/app14031089
Chicago/Turabian StyleLu, Fei, Tian Wang, and Zhaoning Zhang. 2024. "From Route Structure to Human Factors: A Comprehensive Study of Safe Separation on Intersecting Air Routes" Applied Sciences 14, no. 3: 1089. https://doi.org/10.3390/app14031089
APA StyleLu, F., Wang, T., & Zhang, Z. (2024). From Route Structure to Human Factors: A Comprehensive Study of Safe Separation on Intersecting Air Routes. Applied Sciences, 14(3), 1089. https://doi.org/10.3390/app14031089