
A Forward−Backward Splitting Equivalent Source Method Based on S−Difference

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Forward-Backward Equivalent Source Method Based on S−Difference
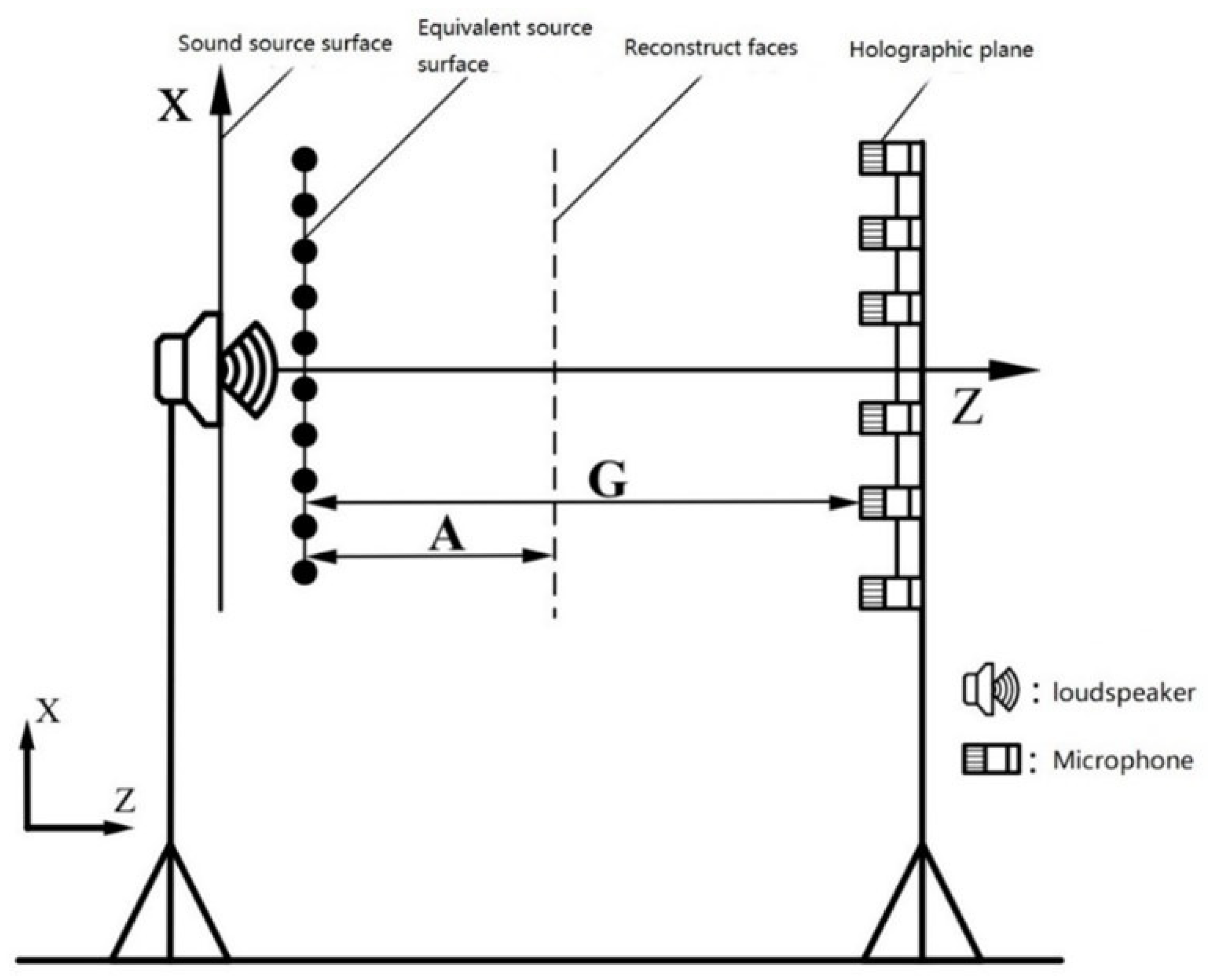
2.1. Basic Principles of Equivalent Source Method
2.2. Forward and Backward Splitting (FBS) Regularization Method for S−Difference
2.3. Forward-Backward Splitting (FBS) Algorithm
3. Numerical Simulations
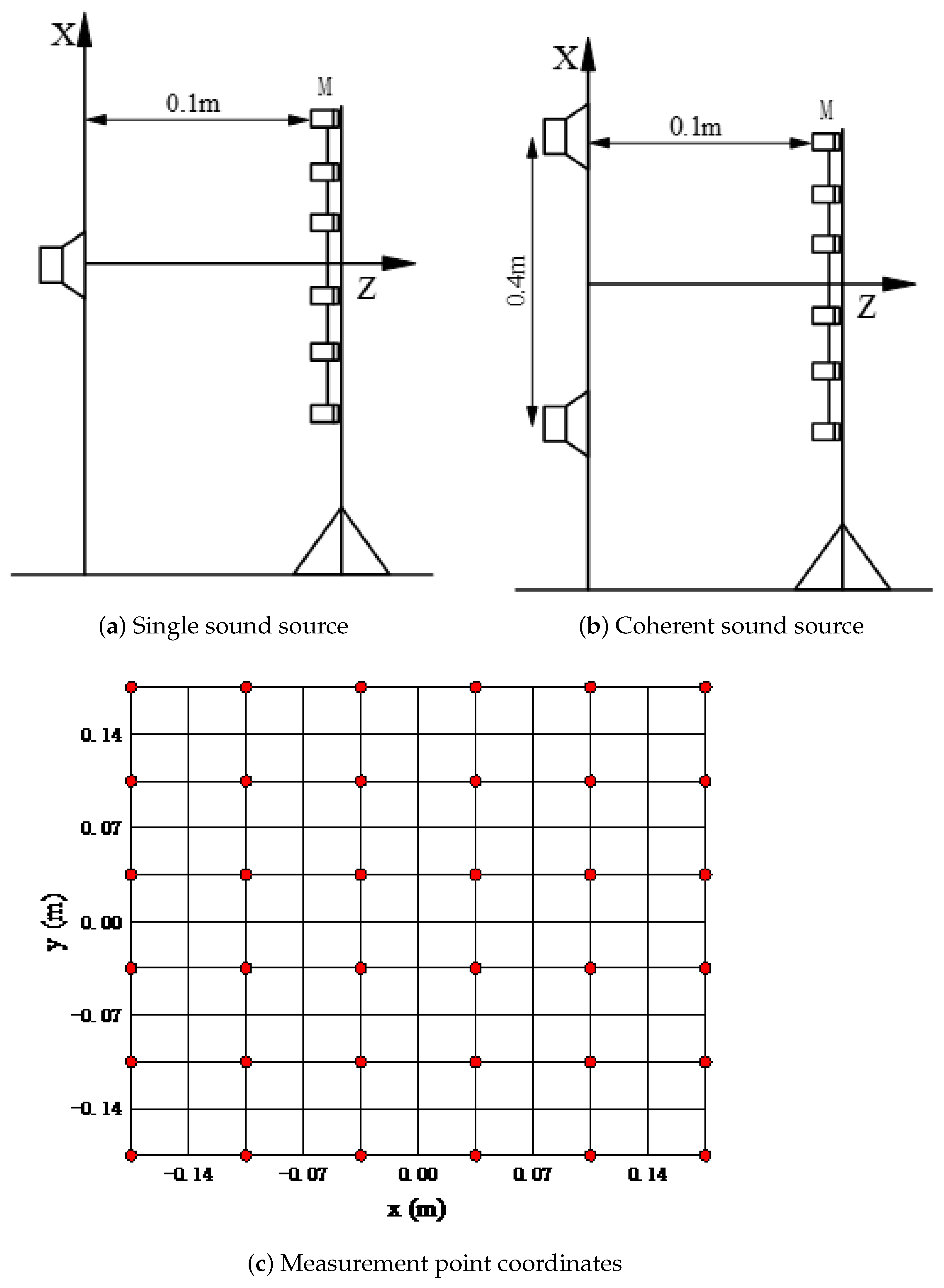
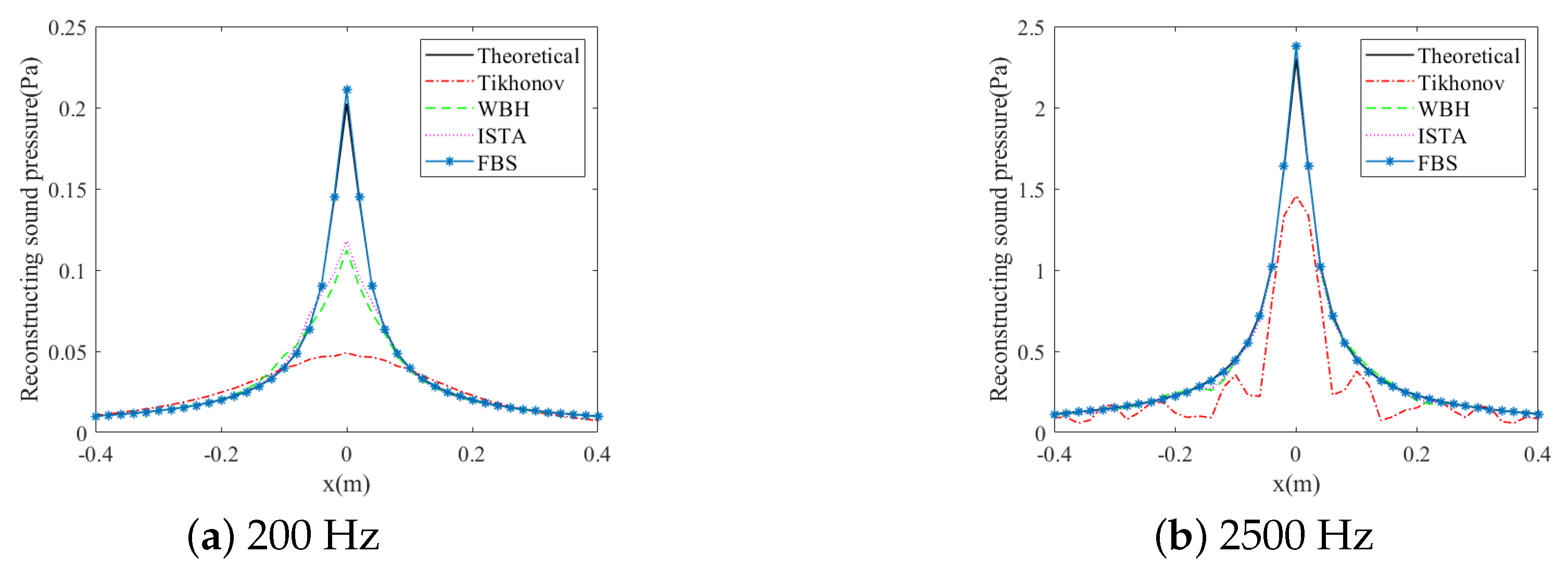
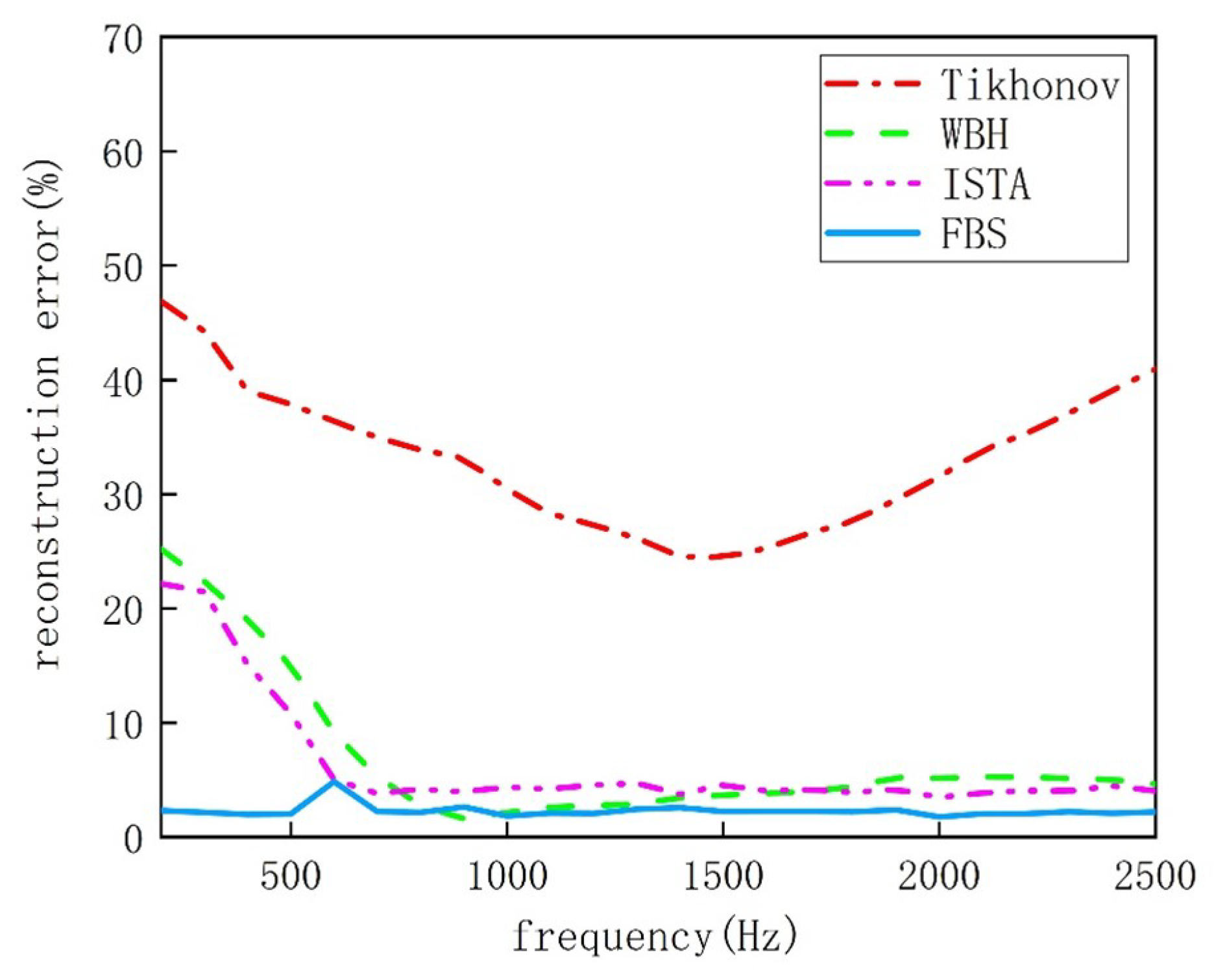
3.1. Single Source Simulation
3.2. Coherent Sound Source Simulation
4. Experimental Verifications
4.1. Experimental Procedure
4.2. Experimental Treatment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Maynard, J.D.; Williams, E.G.; Lee, Y. Nearfield acoustic holography: I. Theory of generalized holography and the development of NAH. J. Acoust. Soc. Am. 1985, 78, 1395–1413. [Google Scholar] [CrossRef]
- Lee, M.; Bolton, J.S. Patch near-field acoustical holography in cylindrical geometry. J. Acoust. Soc. Am. 2005, 118, 3721–3732. [Google Scholar] [CrossRef]
- Steiner, R.; Hald, J. Near-field acoustical holography without the errors and limitations caused by the use of spatial DFT. Int. J. Acoust. Vib. 2001, 6, 83–89. [Google Scholar] [CrossRef]
- Chen, L.L.; Shen, X.W.; Liu, C.; Xu, Y.M. Shape optimization analysis of sound barriers based on the isogeometric boundary element method. J. Vib. Shock 2019, 38, 114–120. [Google Scholar]
- Koopmann, G.H.; Song, L.; Fahnline, J.B. A method for computing acoustic fields based on the principle of wave superposition. J. Acoust. Soc. Am. 1989, 86, 2433–2438. [Google Scholar] [CrossRef]
- Liu, Y.S.; Zeng, X.Y.; Wang, H.T. 3D sound field reconstruction for the enclosed cavity using the multilayer equivalent sources method. Chin. J. Acoust. 2020, 45, 367–376. [Google Scholar]
- Williams, E.G. Regularization methods for near-field acoustical holography. J. Acoust. Soc. Am. 2001, 110, 1976–1988. [Google Scholar] [CrossRef] [PubMed]
- Chu, Z.; Ping, G.; Yang, Y.; Shen, L. Determination of regularization parameters in near-field acoustical holography based on equivalent source method. J. Vibroeng. 2015, 17, 1976–1988. [Google Scholar]
- Xiao, Y. A New Method for Determining Optimal Regularization Parameter in Near-Field Acoustic Holography. Shock. Vib. 2018, 2018, 7303294. [Google Scholar] [CrossRef]
- Kim, S.J.; Koh, K.; Lustig, M. An interior-point method for large-scale L1-regularized least squares. IEEE J. Sel. Top. Signal Process. 2007, 1, 606–617. [Google Scholar] [CrossRef]
- Lin, Y.; Lee, D.D. Bayesian regularization and nonnegative deconvolution for room impulse response estimation. IEEE Trans. Signal Process. 2006, 54, 839–847. [Google Scholar]
- Sun, Y.; Tan, X.; Li, X.; Lei, L.; Kuang, G. Sparse optimization problem with s-difference regularization. Signal Process 2020, 168, 107369. [Google Scholar] [CrossRef]
- Chardon, G.; Daudet, L.; Peillot, A.; Ollivier, F.; Bertin, N.; Gribonval, R. Near-field acoustic holography using sparse regularization and compressive sampling principles. J. Acoust. Soc. Am. 2012, 132, 1521–1534. [Google Scholar] [CrossRef] [PubMed]
- Uzuki, T. L1 generalized inverse beam-forming algorithm resolving coherent/incoherent, distributed and multipole sources. J. Sound Vib. 2011, 330, 5835–5851. [Google Scholar]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Gade, S.; Hald, J.; Ginn, K. Wideband acoustical holography. Sound Vib. 2016, 50, 8–13. [Google Scholar]
- Huang, L.S.; Xu, Z.M.; Zhang, Z.F.; He, Y.S. A fast iterative shrinkage threshold sound source identification algorithm and its improvement. Chin. J. Sci. Instrum. 2021, 42, 257–265. [Google Scholar]
- Hald, J. A comparison of iterative sparse equivalent source methods for near-field acoustical holography. J. Acoust. Soc. Am. 2018, 143, 3758–3769. [Google Scholar] [CrossRef]
- Pavlikov, K.; Uryasev, S. CVaR norm and applications in optimization. Optim. Lett. 2014, 8, 1999–2020. [Google Scholar] [CrossRef]
- Combettes, P.L.; Pesquet, J.C. Proximal splitting methods in signal processing. Inverse Probl. Sci. Eng. 2011, 185–212. [Google Scholar]
- Pan, Z.Z.; Zhong, Z.; Li, J.; Shi, Y. Compressed sensing reconstruction algorithm based on adaptive acceleration forward-backward pursuit. J. Commun. 2020, 41, 25–32. [Google Scholar]
- Lingzhi, L.I. The determination of regularization parameters in planar nearfield acoustic holography. Acta Acust. 2010, 35, 169–178. [Google Scholar]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, J.; Wang, Z.; Liu, J.; Song, D. A Forward−Backward Splitting Equivalent Source Method Based on S−Difference. Appl. Sci. 2024, 14, 1086. https://doi.org/10.3390/app14031086
Mao J, Wang Z, Liu J, Song D. A Forward−Backward Splitting Equivalent Source Method Based on S−Difference. Applied Sciences. 2024; 14(3):1086. https://doi.org/10.3390/app14031086
Chicago/Turabian StyleMao, Jin, Zeyu Wang, Jiang Liu, and Danlong Song. 2024. "A Forward−Backward Splitting Equivalent Source Method Based on S−Difference" Applied Sciences 14, no. 3: 1086. https://doi.org/10.3390/app14031086
APA StyleMao, J., Wang, Z., Liu, J., & Song, D. (2024). A Forward−Backward Splitting Equivalent Source Method Based on S−Difference. Applied Sciences, 14(3), 1086. https://doi.org/10.3390/app14031086