1. Introduction
Origami mechanisms, with their unique properties, such as reconfigurability, negative Poisson’s ratio, and high deployable ratio [
1,
2,
3,
4,
5], have been widely applied in various fields, including aerospace [
6,
7], biomedical engineering [
8,
9], origami robotics [
10,
11,
12,
13,
14,
15], architectural and civil engineering [
16,
17], and spatially deployable mechanisms [
6,
18]. The ongoing advancement of mathematical fields, such as computer science, graph theory, and computational geometry, has further bridged the art and science of origami through mathematical principles. For example, foldable space structures based on origami principles enable the creation of lightweight, compact, and expandable designs that can be efficiently deployed in space applications. These structures leverage origami’s compactness and reconfigurability to improve deployment efficiency while reducing spatial constraints during launches. Additionally, integrating soft materials with origami structures has enhanced mobility and introduced novel movement patterns. Haoyong Yu [
19] developed an amphibious origami robot with multimodal locomotion and body sensing capabilities, allowing for seamless transitions between land and water. This innovation holds promise for applications in environmental monitoring, search and rescue, and exploration. Tao Jin [
20] proposed an origami-inspired soft actuator that integrates stimulus perception and crawling capabilities, enabling robots to sense environmental changes and respond dynamically, demonstrating potential for adaptive, untethered applications in exploration and environmental monitoring. An origami-based soft robotic gripper was also introduced, utilizing a water-bomb design with silicone and latex materials. This gripper achieves versatile, gentle handling of fragile objects through negative pressure actuation, making it suitable for a variety of applications [
21]. Inspired by the rhombic dodecahedron (RDD) origami model, Fuwen Hu [
22] introduces a 3D-printed soft multicellular robot with multimodal locomotion, including crawling, turning, and climbing. Its reconfigurable design enables diverse patterns and functions without reshaping. Junfeng He [
23] introduced a Miura-derived origami tube with programmable stiffness for a modular continuous robot. This robot, driven by steel wires, exhibits flexibility, scalability, and kinematic adaptability, as demonstrated in prototype experiments. Kirigami [
24], a related art form that combines cutting and folding, has also been employed to design mechanisms with broader motion and transformation capabilities, expanding the versatility of origami-based engineering solutions. By precisely controlling the folding and unfolding of origami units, engineers can dynamically adjust mechanical properties such as stiffness and damping [
25]. Researchers have also explored origami mechanisms with negative Poisson’s ratios for applications in morphing structures, energy absorption, and deployable systems. Recent studies have optimized these structures to enhance their elasticity and deformation behavior [
26].
Among various origami mechanisms, Yoshimura tubular origami stands out as one of the most popular. The three-dimensional Yoshimura tubular origami mechanism is typically centrally symmetric. Most research has focused on such symmetric Yoshimura tubes, often achieving specific functions through crease optimization [
27], structural modification [
28], and the integration of new materials [
29,
30]. For example, Hongliang Ren [
31] and colleagues developed an origami-based mobile robot structure utilizing a Yoshimura mechanism for axial crawling and obstacle navigation. George M. Whitesides [
32] introduced a manufacturing method for a soft pneumatic actuator using elastomers embedded with non-expandable thin-walled or fiber structures, enabling anisotropic movements under pneumatic input. Similarly, Xianhe Wei [
33] proposed a high-elongation origami robot based on the cutting principle, identifying factors limiting axial elongation and proposing a method to eliminate the negative Poisson’s ratio by reducing material, thus improving the compliant axial elongation of Yoshimura tubular mechanisms. However, existing research predominantly relies on centrally symmetric Yoshimura tubular origami mechanisms. This singular structural form limits their structural and motion diversity, thereby constraining their applications. Expanding research to include asymmetrical and unconventional designs could unlock new functionalities and broaden the potential of Yoshimura tubular origami in engineering.
Research on metamorphic mechanisms dates back to a 1995 study involving gift-wrapping paper boxes [
34]. Essentially, metamorphic mechanisms have their roots in the ancient art of origami. In 1998, Professor Jiansheng Dai and Rees Jones introduced the concept of “metamorphic mechanisms” [
35] and, in 2005, proposed a topological matrix representation method for these mechanisms [
36]. These foundational studies offered a feasible design framework for origami mechanisms.
Building on the principles of metamorphic mechanisms, this paper presents a Yoshimura tubular origami mechanism and establishes the corresponding origami topology matrix. The objective is to enhance the structural and motion diversity of Yoshimura tubular origami mechanisms, offering designers a more intuitive design approach.
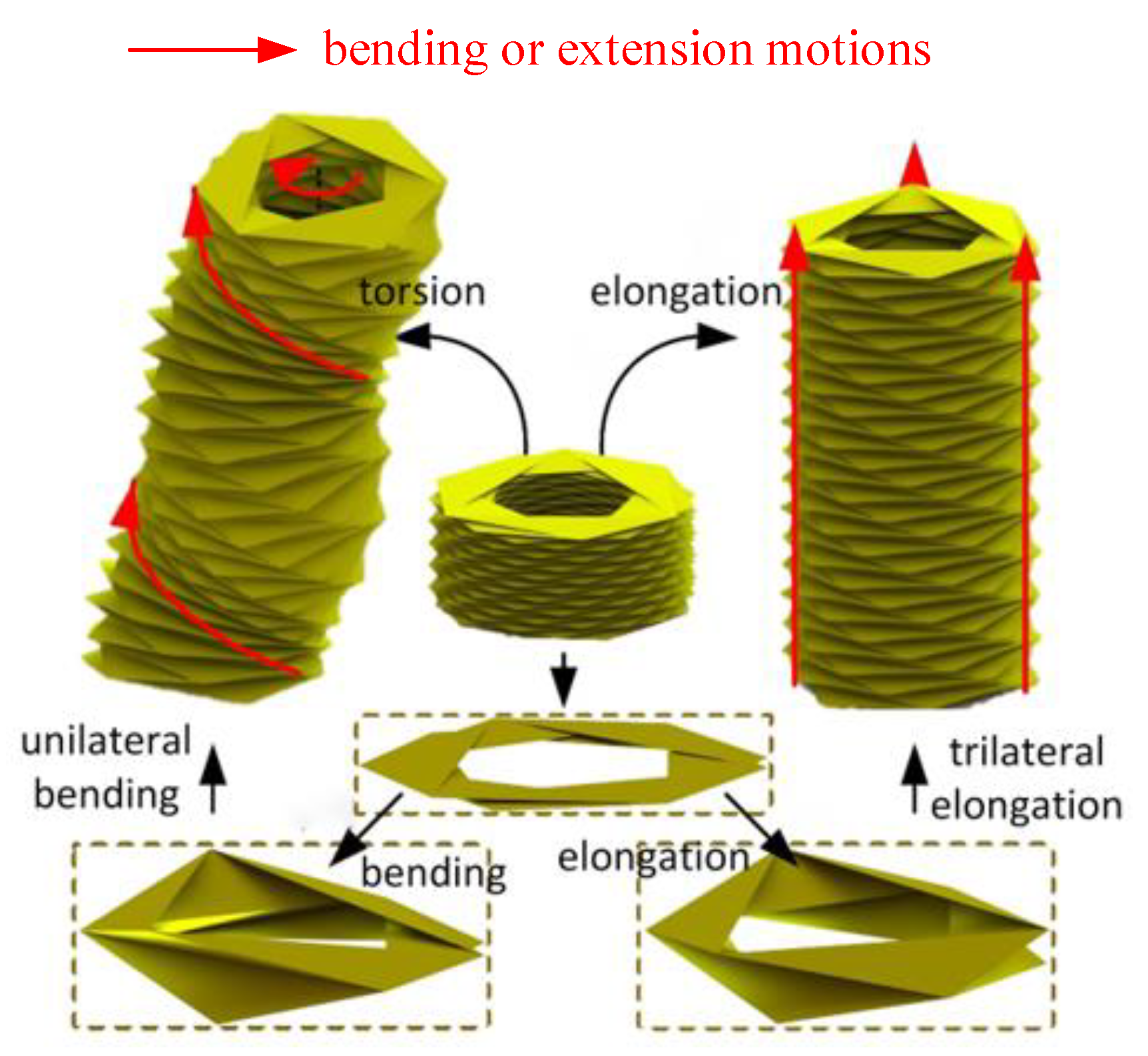
The contributions of this work are summarized as follows: (1) Inspired by the biological concept of “cell transformation,” we introduce a novel tubular-based origami mechanism derived from the Yoshimura pattern, broadening the application scope of the Yoshimura origami concept. (2) We investigate various crease configurations, including left-biased and right-biased designs, which enable the development of both heteromorphic (different-shaped) and homomorphic (similar-shaped) origami structures, thereby enhancing the diversity of origami design. (3) We explore complex motions in Yoshimura origami that have been largely overlooked, such as macroscopic twisting movements and compound motions. This investigation provides new perspectives on the potential applications and dynamic capabilities of origami structures.
The paper is structured as follows:
Section 2 analyzes the planar crease shape elements of the Yoshimura pattern and proposes a tubular origami mechanism based on this pattern.
Section 3 introduces a topological matrix representation method for the proposed Yoshimura tubular origami mechanism, referred to as the origami topology matrix, and validates it with a specific example.
Section 4 explores complex motion forms that differ from traditional centrally symmetric Yoshimura tubular origami mechanisms. In
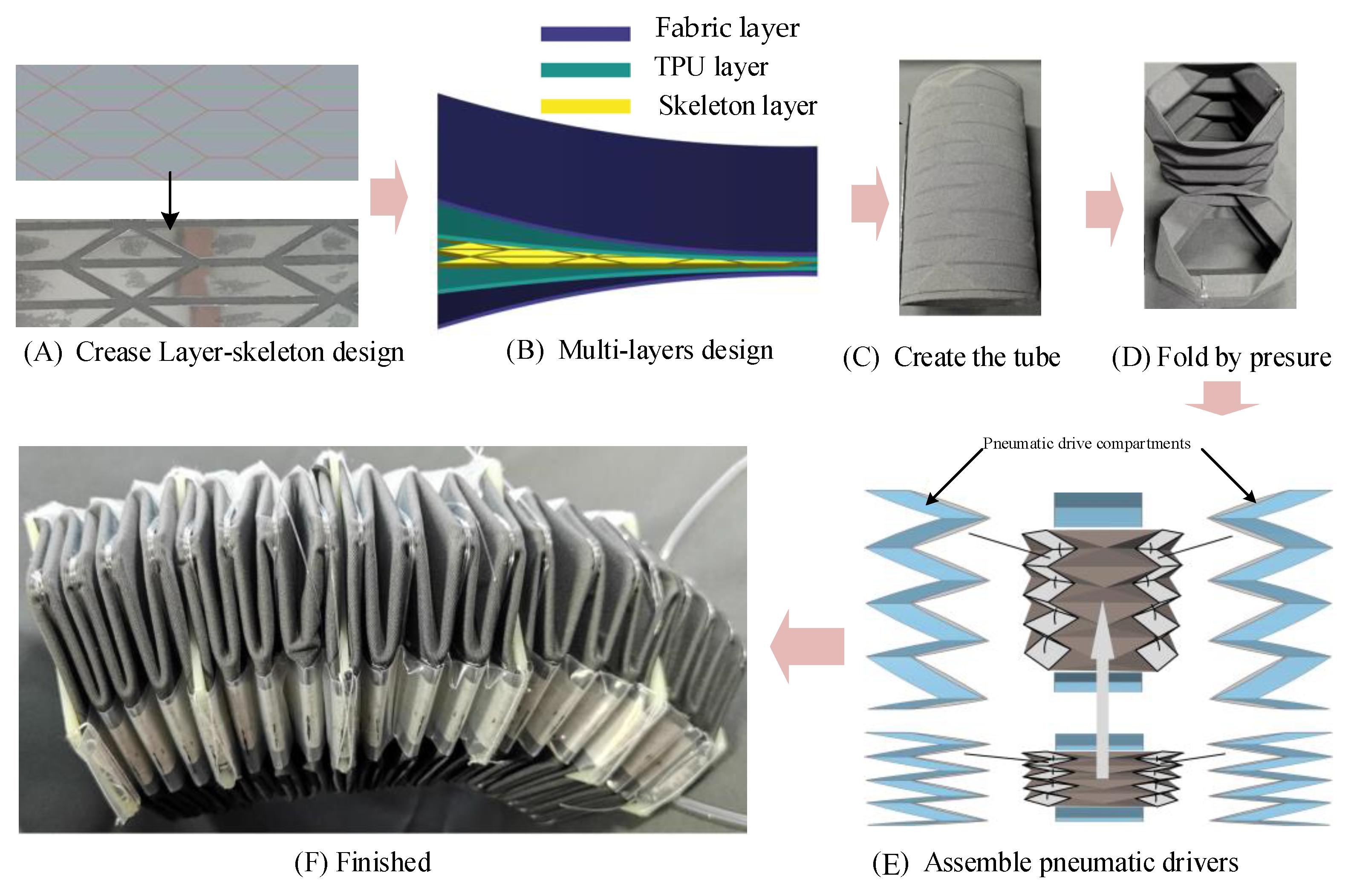
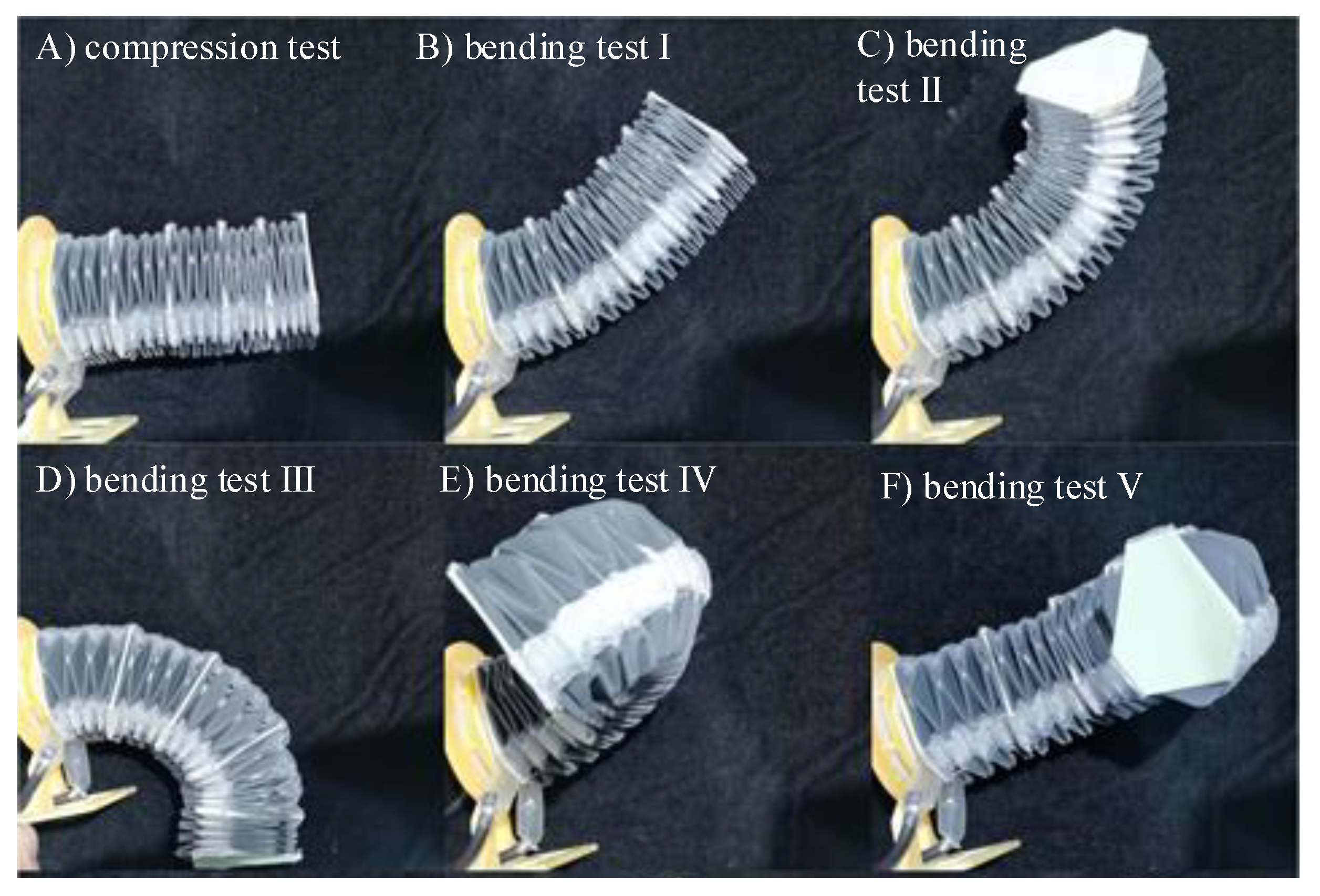
Section 5, the method of making an origami robot is presented and its motion characteristics are analyzed. Finally,
Section 6 and
Section 7 present the discussions and conclusions, respectively.
2. Mechanism Analysis of Yoshimura Tubular Origami
2.1. Crease Shape Elements
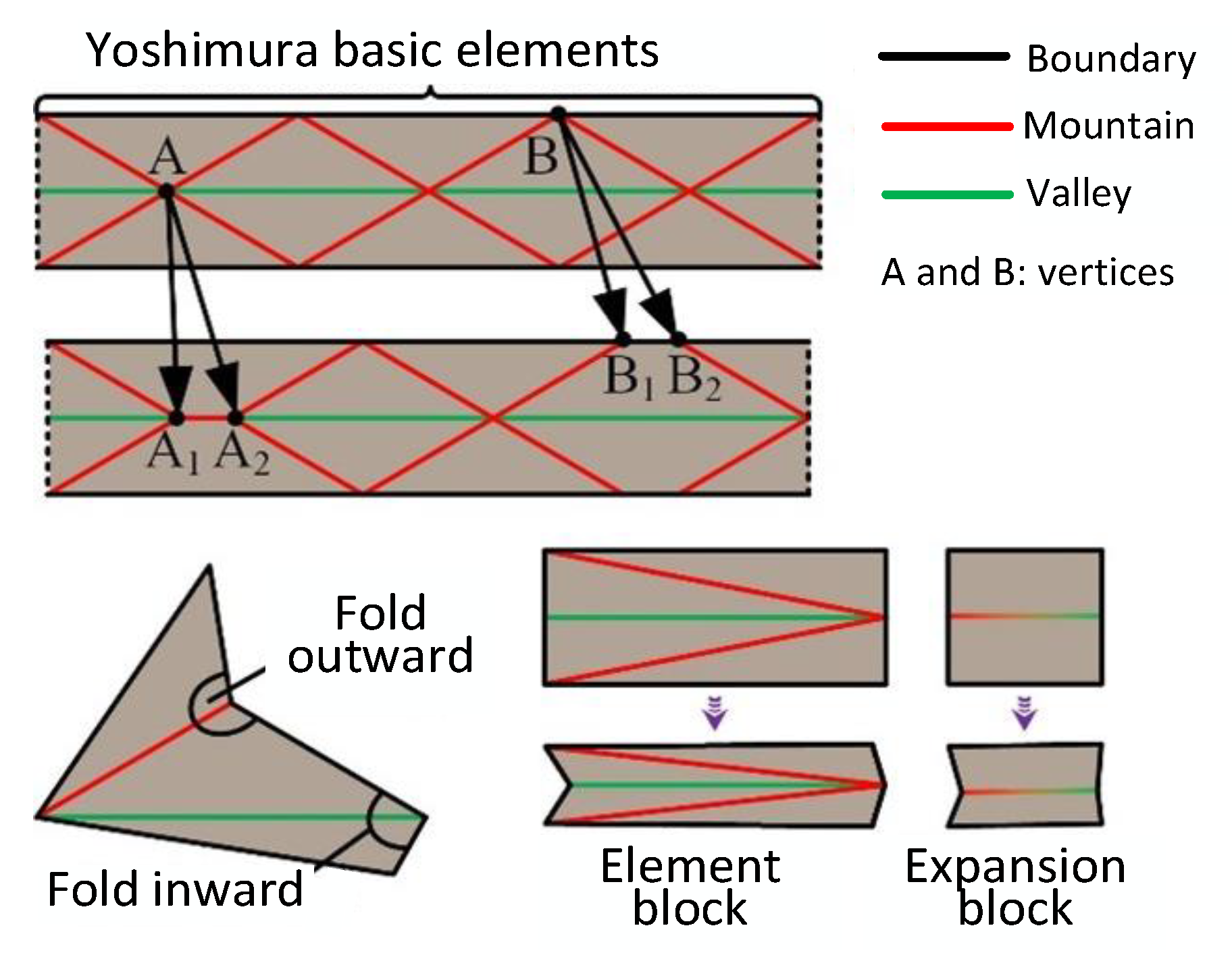
The Yoshimura two-dimensional crease pattern is composed of element blocks and expansion blocks, which are named after commonly used components in the field of Yoshimura origami, as shown in
Figure 1. These two types of blocks can be repeatedly folded outward or inward, along mountain lines or valley lines. This paper focuses on exploring the most common six-element Yoshimura origami mechanism.
As shown in
Figure 2, for a typical Yoshimura origami mechanism with a bivariate planar crease pattern, the crease’s boundary lines can be joined end-to-end to form a cylindrical tube shape. When this cylindrical shape is folded along its original crease patterns, mountain lines and valley lines, a Yoshimura tubular origami mechanism is formed. Planar creases are usually composed of a repeating arrangement of crease elements and, when folded into a cylindrical shape, the crease shape elements at both ends appear separated on the planar crease. This study focuses on analyzing a complete set of crease shape elements highlighted within a defined boundary.
The external boundary lines and the internal mountain lines of the selected set of crease shape elements are symmetrically aligned with respect to the central valley line. To better observe the characteristics, we define the crease shape elements so that the valley line is positioned at the bottom and the mountain line at the top. A perpendicular bisector is drawn from the lower valley line, and a perpendicular line is drawn down to the lower valley line from the peak of the upper mountain line. The two types of crease shape elements are defined as follows:
The crease shape element is defined as a left-biased crease shape element if the perpendicular from the peak of the mountain line to the valley line falls on the left side of the perpendicular bisector of the valley line.
The crease shape element is defined as a right-biased crease shape element if the perpendicular from the mountain line’s peak to the valley line falls on the right side of the valley line’s perpendicular bisector.
Since planar creases are often composed of repeated patterns, the boundary line of each group may also serve as the valley line for another group. More generally, in the definitions provided above, the valley line can also be the boundary line.
2.2. Origami Mechanism Derived from Heterocellular Tube
For a single set of planar creases, a tubular origami mechanism folded from different types of crease shape elements is referred to as an origami mechanism derived from a heterocellular tube.
Excluding the expansion blocks, a Yoshimura origami mechanism’s planar creases consist of three types of crease shape elements: standard crease shape elements, left-biased crease shape elements, and right-biased crease shape elements. These correspond to the spatial forms formed after folding: standard cells, left-biased cells, and right-biased cells, respectively. By removing the constraints on the crease width and the crease length of the element blocks in a single set of planar creases and applying the basic principles of permutation and combination, it can be concluded that there are, in a broad sense, three manifestations of origami mechanisms based on heterocellular tubes.
As shown in
Figure 3, the planar creases of the standard-left-biased heterocellular tubular origami mechanism are formed by splicing the left-biased crease shape elements in the upper part with the standard crease shape elements in the lower part. It can be observed that the crease shape elements at the left and right ends are not fully intact. To better represent each crease shape element within the planar creases and to retain as much of the complete crease shape elements as possible, the ends of the crease shape elements are intentionally disrupted. However, in the folded spatial form, the crease shape elements remain undamaged. The left-biased and standard cells still manifest with mountain lines corresponding to boundary lines and valley lines, respectively. The combination of standard cells and left-biased cells corresponding to the standard and left-biased crease shape elements forms the standard-left-biased heterocellular tubular origami mechanism.
As shown in
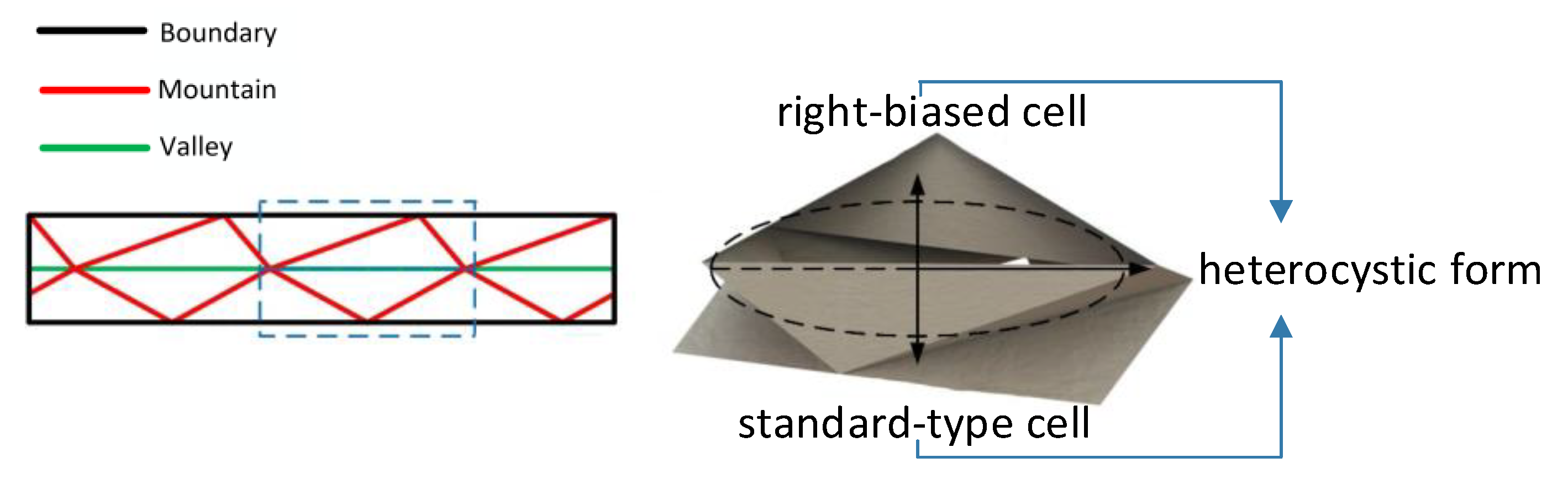
Figure 4, the planar creases of the standard-right-biased heterocellular tubular origami mechanism are formed by splicing the right-biased crease shape elements in the upper part with the standard crease shape elements in the lower part. The combination of standard cells and right-biased cells corresponding to the standard and right-biased crease shape elements forms the standard-right-biased heterocellular tubular origami mechanism.
As shown in
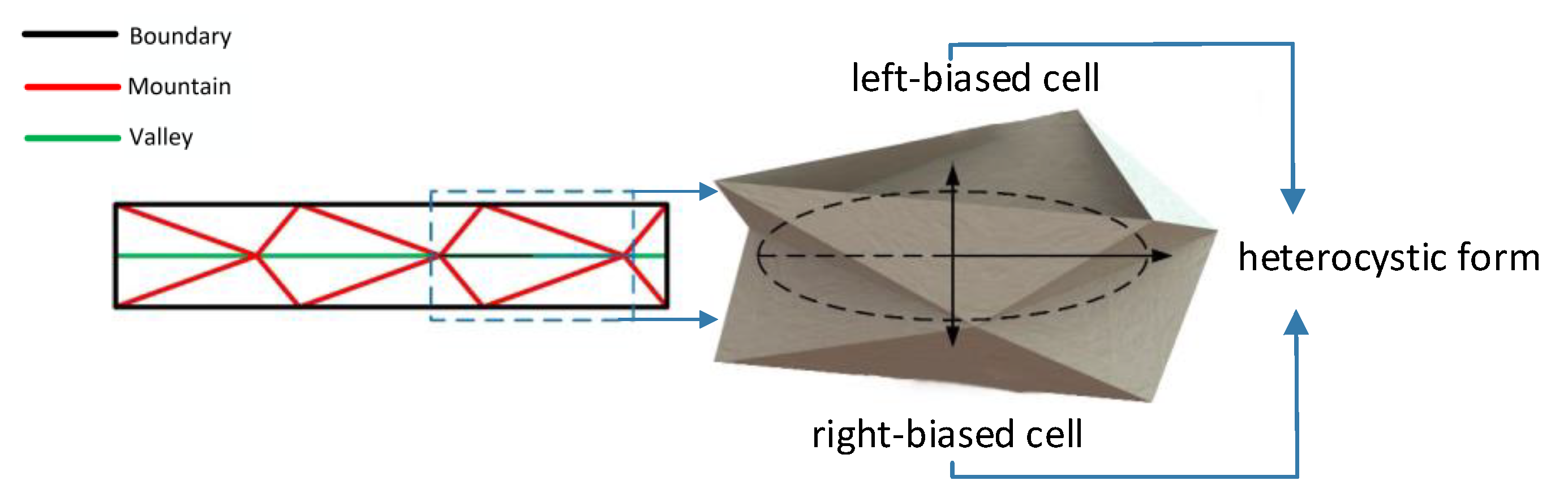
Figure 5, the planar creases of the left-biased–right-biased heterocellular tubular origami mechanism are formed by splicing the left-biased crease shape elements in the upper part with the right-biased crease shape elements in the lower part. The combination of left-biased cells and right-biased cells corresponding to the left-biased and right-biased crease shape elements forms the left-biased–right-biased heterocellular tubular origami mechanism.
2.3. Origami Mechanism Derived from Homocellular Tube
Similarly, for a single set of planar creases, a tubular origami mechanism folded from identical types of crease shape elements is referred to as a homocellular tubular origami mechanism. The planar creases of the Yoshimura origami mechanism contain the aforementioned three types of crease shape elements, without considering expansion blocks and excluding the constraints of crease width and element block length in a single set of planar creases. In a broad sense, there are three forms of homocellular tubular tube origami mechanisms, as described below.
As shown in
Figure 6, the planar creases of the standard-type homocellular tubular origami mechanism are composed of standard crease shape elements. Similarly, the standard cells corresponding to the standard crease shape elements form the standard-type homocellular tubular derivative origami mechanism. This origami mechanism is fully symmetric about its central axis, making it easy to design. The planar creases and the corresponding spatial form are well known and common, as previously analyzed in detail.
As shown in
Figure 7, the planar creases of the left-biased homocellular tubular origami mechanism are composed of left-biased crease shape elements. Similarly, the left-biased cells corresponding to the left-biased crease shape elements form the left-biased homocellular tubular derivative origami mechanism.
As shown in
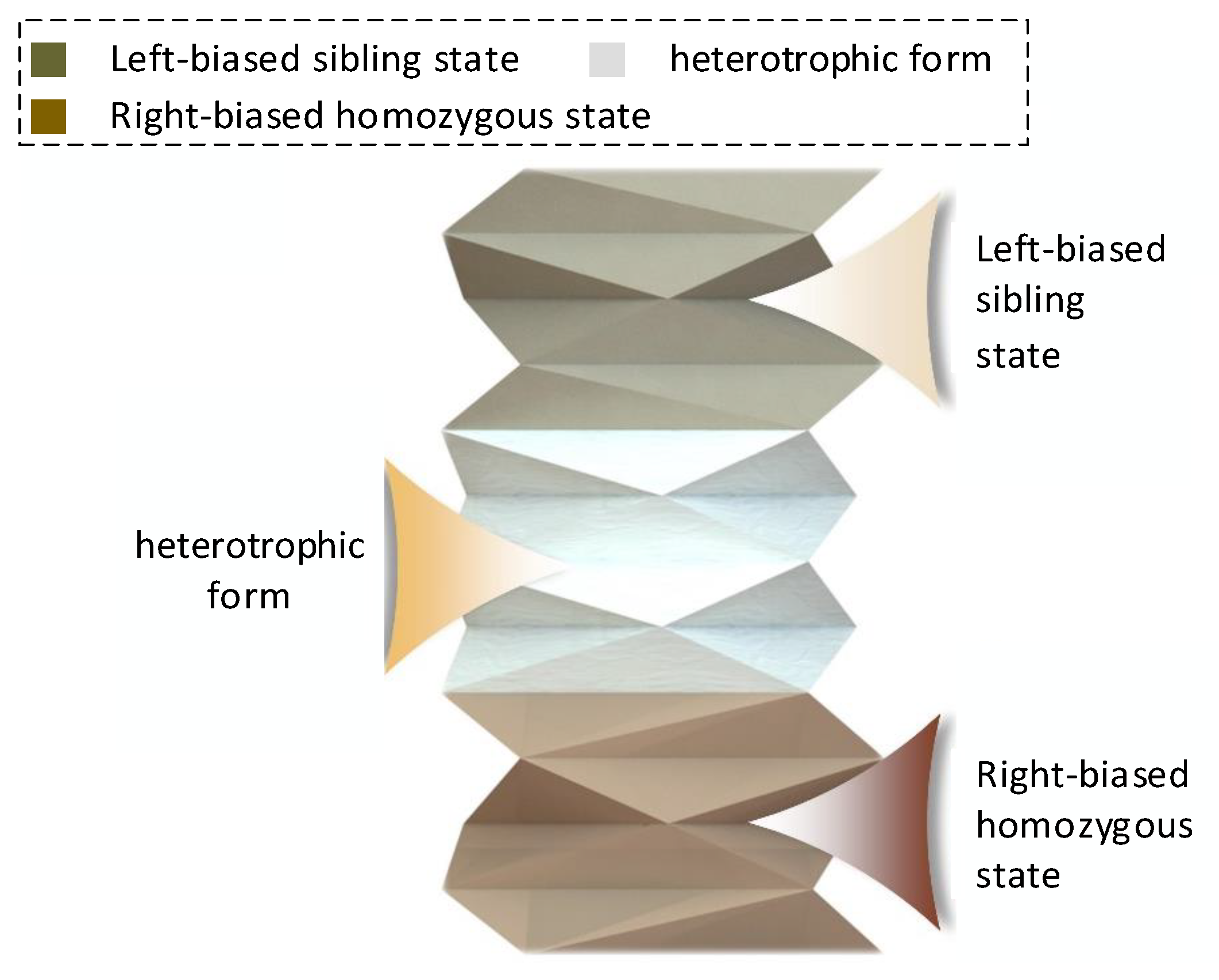
Figure 8, the planar creases of the right-biased homocellular tubular origami mechanism are composed of right-biased crease shape elements. Similarly, the right-biased cells corresponding to the right-biased crease shape elements form the right-biased homocellular tubular derivative origami mechanism. The external manifestations differ for the heterocellular and homocellular forms of the Yoshimura-type origami mechanisms defined in the above figures, leading to distinct motion characteristics for each mechanism. Depending on the actual requirements, a design can be created that combines both homocellular and heterocellular forms. This section presents an example of such a tubular origami mechanism, as illustrated in
Figure 9.
3. The Topological Matrix Representation Method for Yoshimura Origami Configurations
3.1. Description of the Crease Matrix
In the Yoshimura origami planar creases, there are essentially three types of crease shape elements, as shown in
Figure 10. The base length
and width
are used to describe the characteristic information of each crease shape element. In addition to the standard crease shape element, an inclination angle
is introduced to describe the degree of deviation for the left- and right-biased crease shape elements. As analyzed in
Section 3.1, the specific left and right declination angle values are expressed as the magnitude of the angle between the line connecting the vertex of the mountain line to the midpoint of the base and the midsagittal line of the base. It should be noted that, as shown in
Figure 10, the base line can correspond to either a boundary line or a valley line.
Thus, the symbol is used to represent the standard crease shape element, , for the left-biased crease shape element, and for the right-biased crease shape element. In these symbols, the subscripts , , and are used to describe the basic characteristic information, including the base length, width, and the left or right inclination angle of the crease shape element.
With the symbol representation method for the crease shape elements mentioned above, we can now establish a crease matrix representation method for Yoshimura origami planar creases. The crease matrix is denoted by
, as shown in Equation (1). The following are some explanations regarding the crease matrix
:
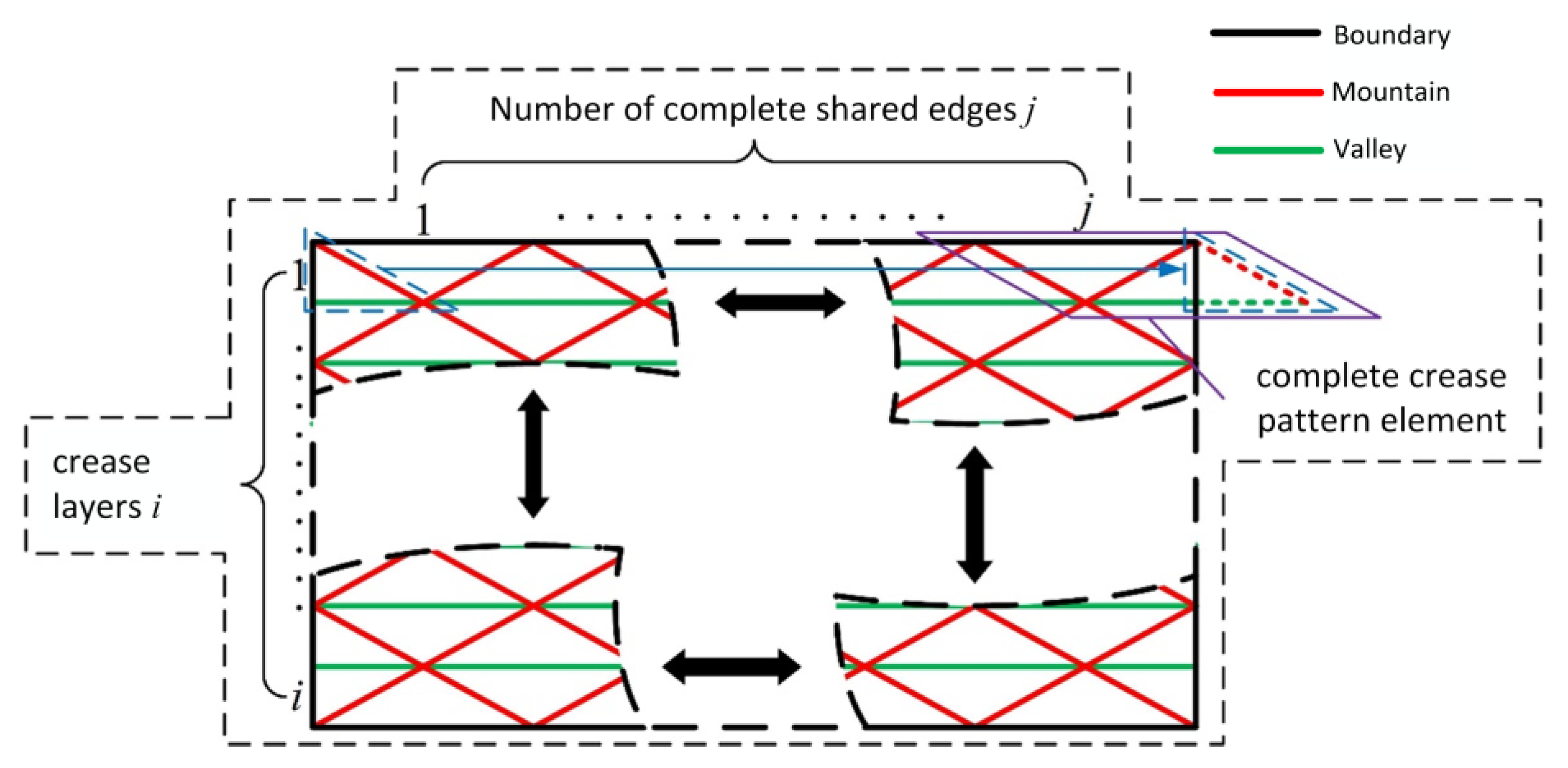
As illustrated by the specific meaning of the crease matrix in
Figure 11, each element within the crease matrix
represents the following:
(1) The number of rows in the crease matrix represents the number of layers in the Yoshimura origami planar creases, while the number of columns represents the number of complete common edges, i.e., boundary lines or valley lines, in each layer of planar creases.
(2) Each element in the rows of the crease matrix represents a complete crease shape element within each layer of the planar creases.
(3) Each element in the crease matrix can represent different types of crease shape elements, such as the standard crease shape element , the left-biased crease shape element , and the right-biased crease shape element .
It is important to note that the connection between the layers of planar creases will remain intact only if the length of the boundary lines or valley lines corresponding to each crease shape element is equal. Therefore, it is assumed that the complete common edge length within each layer of planar creases must be equal.
In this section, we introduce the concept of a topological matrix for origami, which enhances our ability to represent and design the spatial form of the Yoshimura origami mechanism. Once the relationship between the plane creases and spatial forms is established, the origami configuration’s topological matrix serves as a more intuitive mathematical tool for representing the designed origami mechanism.
3.2. Description of the Morphological Matrix
In the Yoshimura origami spatial structure, through analysis, there are three types of cells that exist through analysis, standard cells, left-biased cells, and right-biased cells, each composed of corresponding cell elements. The internal constraints of the crease pattern elements corresponding to the cells can result in either a fully overlapped or non-overlapped spatial configuration, which leads to different characteristic information being conveyed even by the same type of cell. In this context, “fully overlapped” refers to the phenomenon where the planes at both axial ends of the cylindrical state can approximately coincide, which is referred to as the fully overlapped spatial configuration of the Yoshimura origami structure. Conversely, the non-overlapped configuration is the opposite of this. Additionally, there may be various cell elements within the cells. Describing the spatial configuration information of such mixed-type cells can be more complex. Given these situations mentioned above, further decomposition for each type of cell is necessary so that resultant cell elements can describe their own spatial configuration information more comprehensively. By decomposing the cells, the characteristic information of each cell element can be described using height . In addition to the standard cell elements, an additional torsion angle is required to describe the axial torsion of the left-biased and right-biased cell elements.
As shown in
Figure 12, the standard cell element can be denoted by the symbol
. The fully overlapped standard cell element is denoted by
, while the non-overlapped standard cell element, which has a certain spatial height, as previously analyzed, is denoted by
.Unlike the standard cell element, the left-biased and right-biased cell elements may not only have spatial height but also a certain axial torsion angle. For the left-biased and right-biased cell elements, the skew angle value of the crease pattern element corresponds to the axial torsion angle in the origami spatial configuration. The determination of the torsion angle and its direction is further explained as follows:
As shown in
Figure 13, by taking a cross-sectional view of a cell element from the origami spatial configuration, the left-biased and right-biased cell elements are derived from the standard cell element. Therefore, a hypothetical cross-section corresponding to the standard cell element can be established, represented by the black dashed triangular line. The blue dashed triangular line represents the actual position of the cell element formed after derivation from the standard cell element. The angle formed during the derivation process is defined as the axial torsion angle
n of the left-biased and right-biased cell elements. The direction is determined as follows: the left-biased cell element corresponds to a counterclockwise axial torsion angle, while the right-biased cell element corresponds to a clockwise axial torsion angle.
As shown in
Figure 14, the left-biased cell element and the right-biased cell element are represented by the symbols
and
, respectively. For the left-biased cell element
,
represents the fully overlapped left-biased cell element with a counterclockwise axial torsion angle, and
represents the non-overlapped left-biased cell element with a counterclockwise axial torsion angle. For the right-biased cell element
,
represents the fully overlapped right-biased cell element with a clockwise axial torsion angle, and
represents the non-overlapped right-biased cell element with a clockwise axial torsion angle.
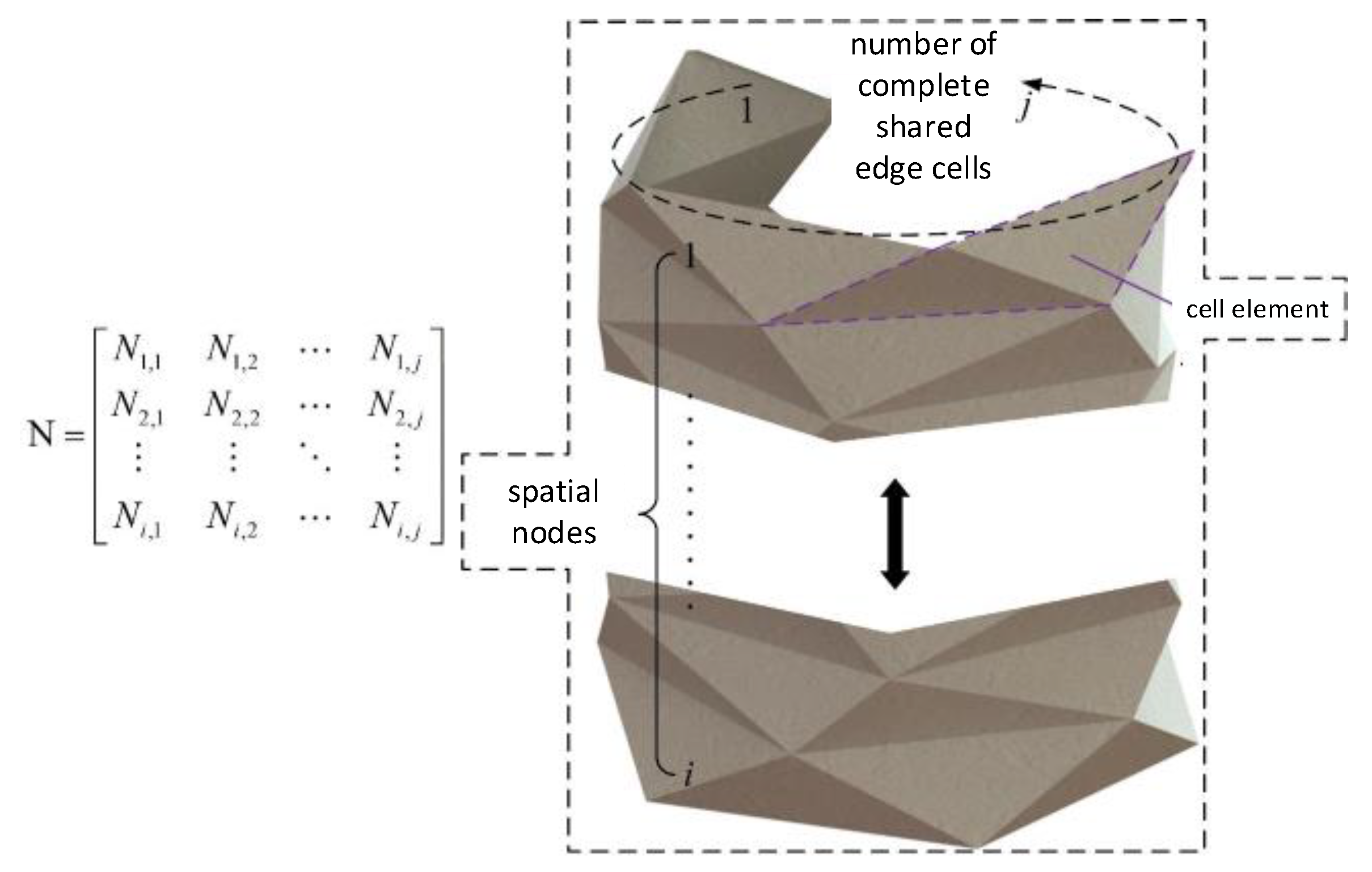
With the symbolic representation of the cell elements established above, we can now develop the method for describing the morphological matrix of the Yoshimura origami spatial structure. The morphological matrix is denoted by
:
and the specific meaning of each element in the matrix
is as follows:
(1) The number of rows in the morphological matrix represents the number of segments in the Yoshimura origami spatial structure. The number of columns represents the number of complete common-boundary cells included in each segment of the spatial structure.
(2) The elements in each row of the morphological matrix represent the cell elements contained in each segment of the spatial structure.
(3) Each element in the morphological matrix can represent different types of cell elements, such as the standard cell element or , the left-biased cell element or , and the right-biased cell element or .
When describing the crease matrix, it is important to note that the assumption of equal complete common boundaries in each layer of the planar crease ensures the folded spatial structure forms a cylindrical closed configuration. Different types of cell elements are generated from the corresponding crease pattern elements in the planar crease. Because the lengths of the crease pattern elements are equal, each segment of the Yoshimura origami spatial structure can be combined. However, since the cell elements formed by the complete crease pattern elements in each row of the crease matrix may or may not be fully overlapped after folding, the overlap condition is related to the length and width constraints within the crease pattern element. Therefore, it is assumed that the overlap condition of each segment of the cell elements must be entirely the same, as illustrated in
Figure 15.
3.3. Examples of the Topological Matrix Representations
The above sections have already provided a description of the crease matrix
and the morphology matrix
. Below, we will present some examples of how to represent Yoshimura origami structures using topological matrices:
First, let us represent a standard-type homomorphic tube-derived origami structure. Assume the crease matrix is six rows by three columns; as shown in Equation (3), we initially set the complete common edge length to , and then the base length of the standard-type crease element can be determined. Regarding the width of the crease element, as discussed earlier, its value is related to whether the spatial configuration is fully overlapped or not. The superscript of the width of the crease element corresponds to the row number in the crease matrix.
The corresponding crease matrix
and morphology matrix
are as follows:
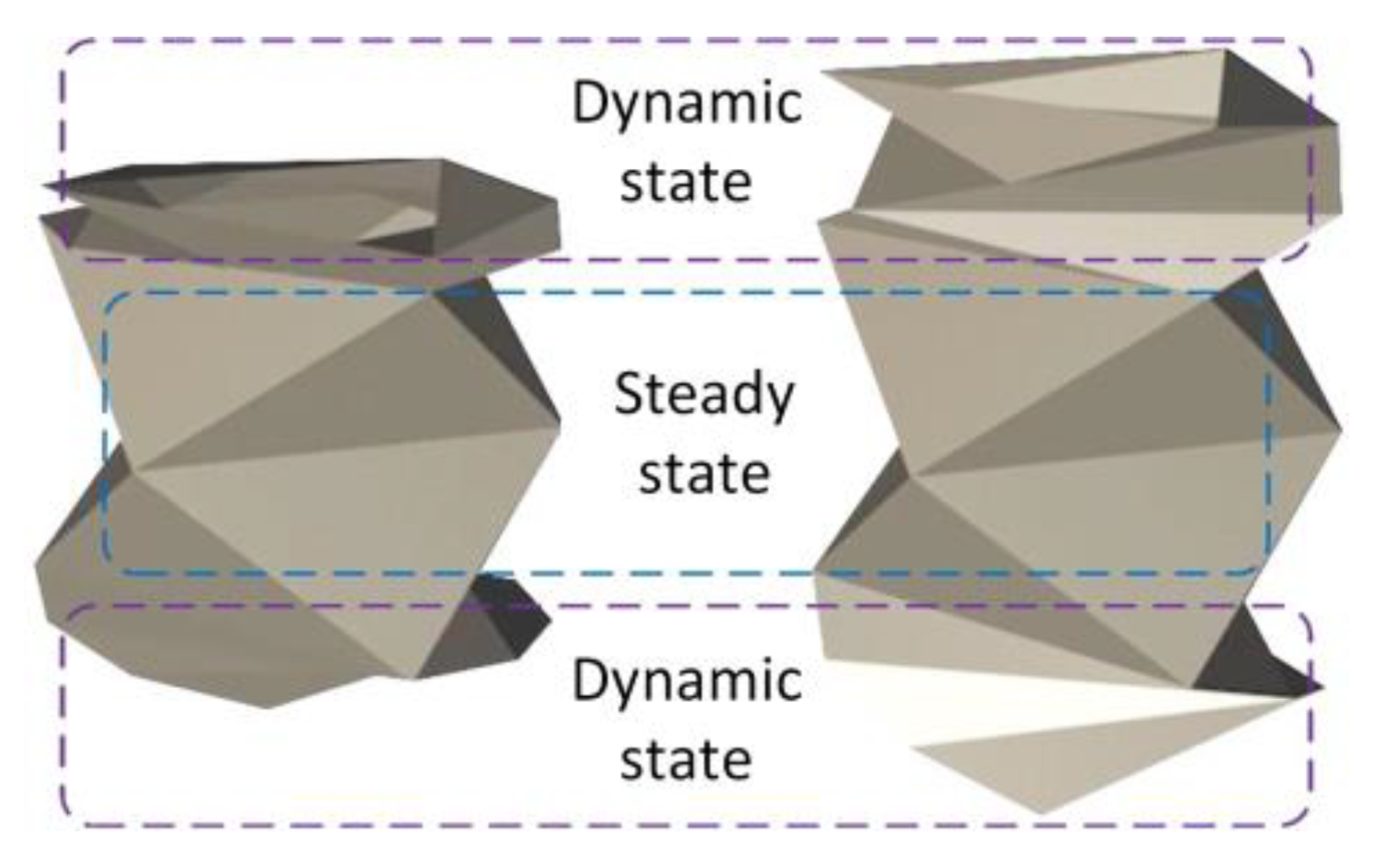
By drawing the spatial configuration, we can observe that, as anticipated in this section, the first, second, fifth, and sixth segments are in a fully overlapped state, while the third and fourth segments are not fully overlapped, as shown in
Figure 16. This results in dynamic and stable regions.
Similarly, assume the crease matrix
is eight rows by three columns. Initially, set the complete common edge length to
; then, the base lengths
of the standard-type, left-biased, and right-biased crease elements can be determined. The widths
of the crease elements are related to whether the spatial configuration is fully overlapped or not, and the skewness angle is
. The superscript of the width of the crease element corresponds to the row number in the crease matrix, as shown in Equation (5):
The corresponding crease matrix is shown in Equation (6):
The morphology matrix includes left-biased and right-biased cell elements, both of which can be fully overlapped, and the corresponding skewness angles
n can be measured through modeling, as shown in Equation (7):
The corresponding morphology matrix
is then obtained:
By drawing the spatial configuration, we can observe that, as anticipated, the first, second, third, sixth, seventh, and eighth segments are in a fully overlapped state, while the fourth and fifth segments are not fully overlapped, as shown in
Figure 17. This results in dynamic and stable regions.
Through the two examples above, this paper has represented two Yoshimura origami structures using the crease matrix and morphology matrix. In fact, when the planar crease and spatial configuration are correlated, the origami configuration topological matrix can serve as a more intuitive mathematical tool to represent the designed Yoshimura origami structures. On a deeper level, knowing the designed Yoshimura origami structure, it is possible to deduce the corresponding planar crease, providing a theoretical basis for the actual manufacturing of origami structures. This method not only allows for the mathematical representation of origami structures but also offers designers a more intuitive design approach, further aiding the practical production of origami structures.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}