
Non-Destructive Evaluation of Reinforced Concrete Structures with Magnetic Flux Leakage and Eddy Current Methods—Comparative Analysis



Abstract
1. Introduction
1.1. Motivation
1.2. Non-Destructive Methods for Testing Concrete Structures
- 1.
- Visual condition of concrete—the category is represented by the oldest NDT method: visual inspection (VI).
- 2.
- Evaluation of electromagnetic properties—this approach offers several advantages, including direct interaction with the reinforcement, minimal attenuation of electromagnetic waves by concrete, cost-effectiveness, and a broad range of operational principles and applications. This category can be further divided into three subcategories:
- a.
- Magnetic properties—this category encompasses passive methods, such as the residual magnetization technique (RMT), and active methods where the object being tested is continuously magnetized, as seen in magnetic flux leakage (MFL), or magnetized before testing, as in magnetic particle inspection (MPI) [4,5,6];
- b.
- c.
- 3.
- 4.
- Carbonation level of concrete—providing insights into the risk of corrosion of the carbonation mechanism (the connection between corrosion and carbonation is described in [12]); this parameter can be evaluated using three different properties:
- a.
- Electrical properties—this category includes the half-cell potential method (HCP) and concrete resistivity method (CR). The HCP technique assesses the capacity (electrochemical potential) between a reference electrode placed on the structure surface and reinforcement placed inside the structure [15,16]. The CR is used to measure the electrical resistivity of concrete [17,18,19]. Both electrical properties change while the carbonation process progresses;
- b.
- c.
- 5.
- 6.
- Mechanical properties of the whole structure—the methods test propagation of mechanical waves (sonic and ultrasonic frequencies)—waves may be generated by the tested object (passive method), like in the case of acoustic emission (AE) [25,26], by induced electromagnetic waves, like in the case of electromagnetic acoustic transduction (EMAT), or by mechanical wave—impact echo (IE) and most forms of ultrasonic testing (UT) [27,28,29,30,31].
- 7.
- Natural frequencies of the whole structure (low frequency)—the methods in this category investigate the resonance frequencies of the object. Vibrations can be induced by electromagnetic waves (as seen in the M5 system), physical impact (such as in the hammer impact test (HIT)), or passively through vibration monitoring (VM). Modal analysis is frequently employed in this type of testing [6,32,33].
- Evaluation of rebars: this category assesses the capability to locate reinforcing bars and identify their class and diameter within typical concrete cover thickness ranges (20–50 mm).
- Evaluation of corrosion: this category evaluates the ability to detect corrosion by examining delamination and diameter reduction, focusing on standard concrete cover thickness ranges.
- Evaluation of h (concrete cover thickness): this criterion measures the method’s effectiveness in estimating the thickness of the concrete cover within typical ranges.
- Evaluation of carbonation: this category involves analyzing various changes in the physical properties of concrete that indicate ongoing carbonation processes.
- Evaluation of concrete: this category serves to assess concrete integrity. The criterion includes the detection of delamination, large air voids, macro heterogeneities, and cracks within the concrete.
- Area testing (spatial measurement capability): this category highlights the method’s ability to conduct measurements simultaneously at many points (creating a measurement matrix).
- Commercial viability: this criterion evaluates the method’s usability for commercial applications, including cost measurements and any technical limitations that may affect its utility.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Example Methods | Evaluation of: | Area Testing | Commercial Viability | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Rebar | Corrosion | h | Carbonation | Concrete | |||||||
| Mechanical | |||||||||||
| low frequency | M5 1, HIT 2, VM 3 | ||||||||||
| sonic | IE 4, AE 5 | ||||||||||
| ultrasonic | UT 6 | ||||||||||
| Magnetic | |||||||||||
| active | MFL 7, MPI 8 | ||||||||||
| passive | RM 9 | ||||||||||
| Electric | |||||||||||
| capacity | HCP 10 | ||||||||||
| resistance | CR 11 | ||||||||||
| Electromagnetic | |||||||||||
| low frequency | MFL 7 | ||||||||||
| medium frequency | EC 12 | ||||||||||
| microwave | GPR 13 | ||||||||||
| terahertz | - | ||||||||||
| infrared | IR 14 | ||||||||||
| visible | VI 15 | ||||||||||
| visible | FO 16 | ||||||||||
| radiography | X-ray | ||||||||||
| Chemical | RT 17, PT 18 | ||||||||||
| Concrete strength | WP 19, SH 20 | ||||||||||
| not suitable | suitable in some cases | moderate suitable | well suitable | ||||||||
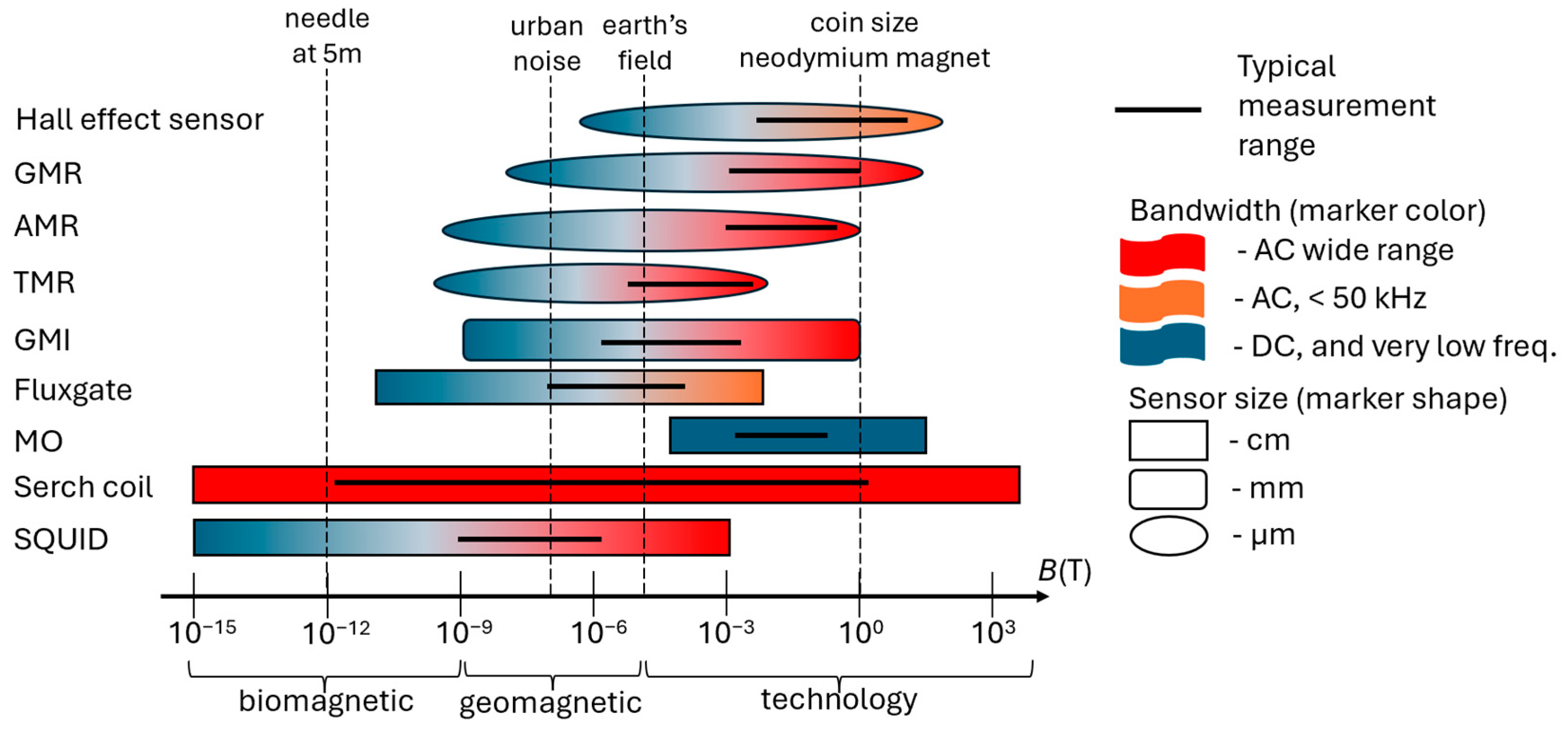
1.3. Selection of the Magnetic Sensor
2. Measuring Systems, Materials and Methods
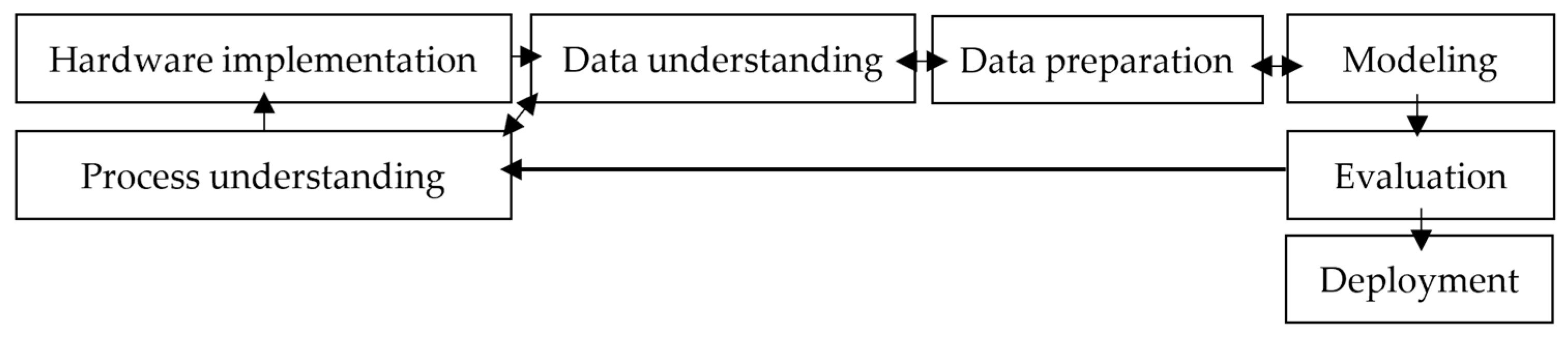
2.1. Methodology
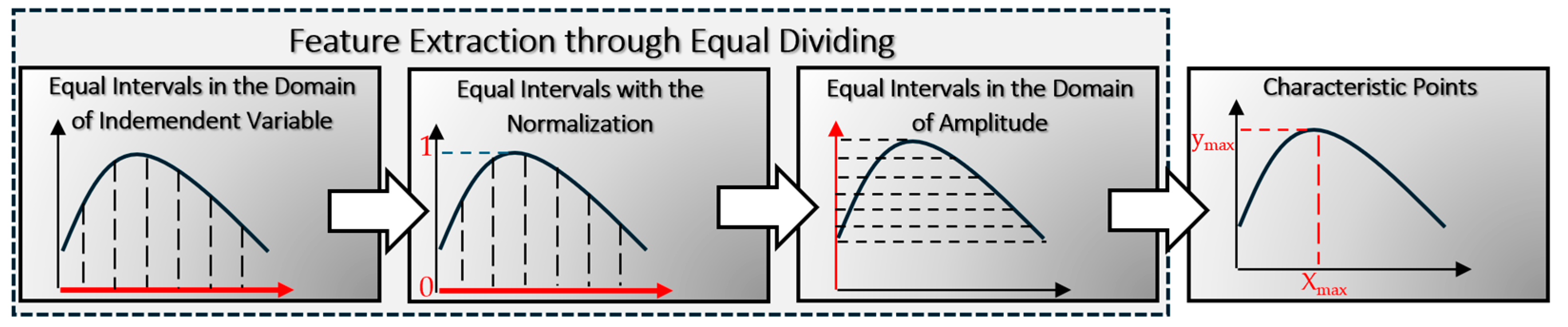
2.1.1. Feature Extraction
- The number of attributes used in the model should be kept to a minimum to reduce the impact of the curse of dimensionality;
- The attributes should be independent and demonstrate low correlation with each other. When attributes are dependent or exhibit high correlation, they can exacerbate the curse of dimensionality without providing meaningful knowledge;
- The attributes included in the model must accurately represent the shape and characteristics of the measured waveforms.
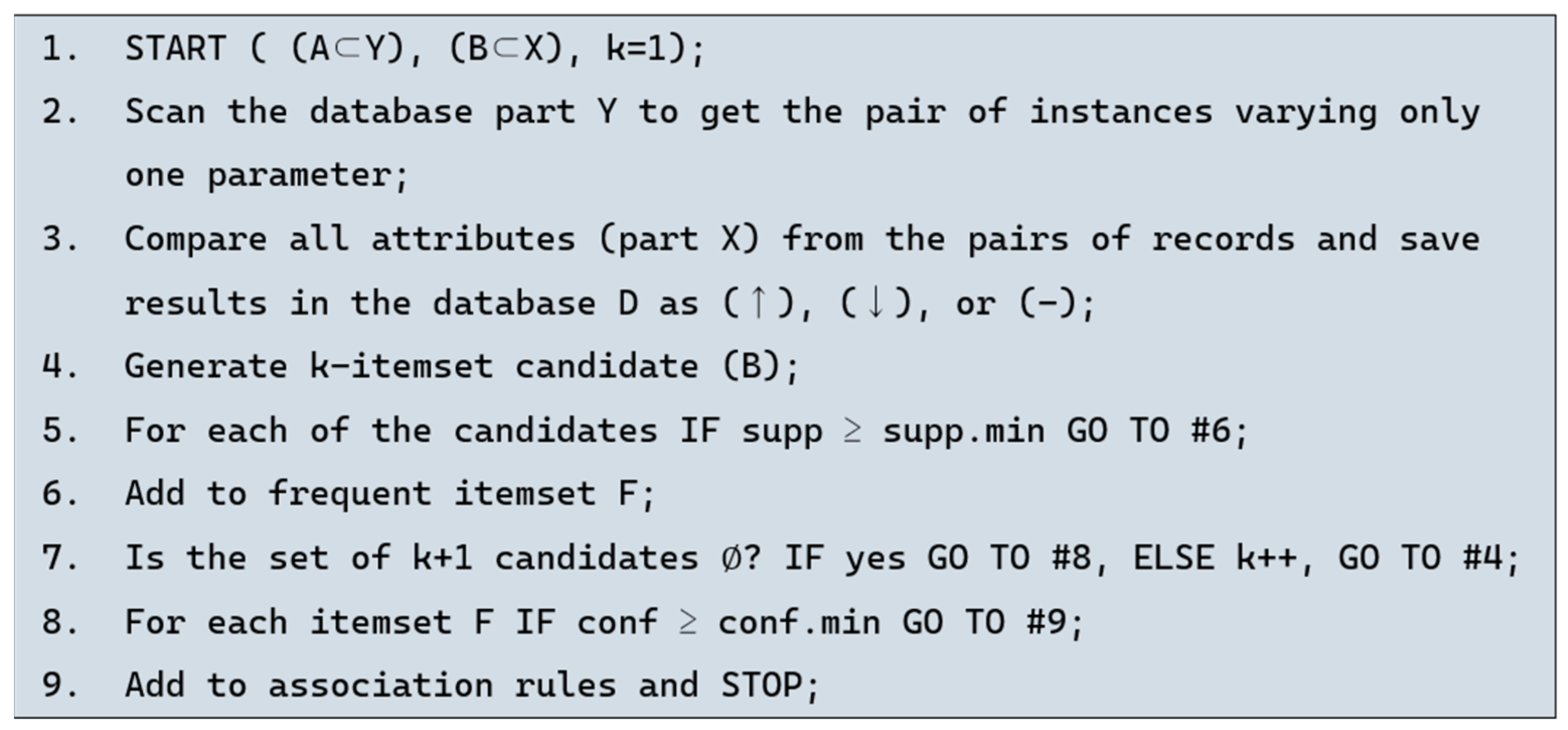
2.1.2. Extraction of Association Rules
- Set A includes only the structure’s physical parameters;
- Set B includes only the waveform’s parameters;
- The BODY length equals 1; only one physical parameter (A) can change.
2.2. Measuring System and Samples
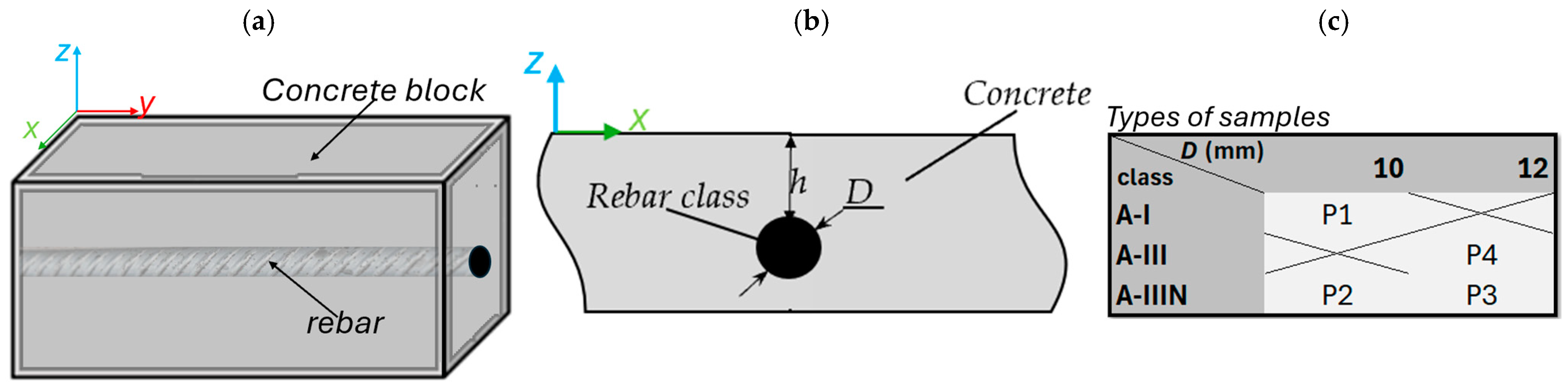
2.2.1. Samples
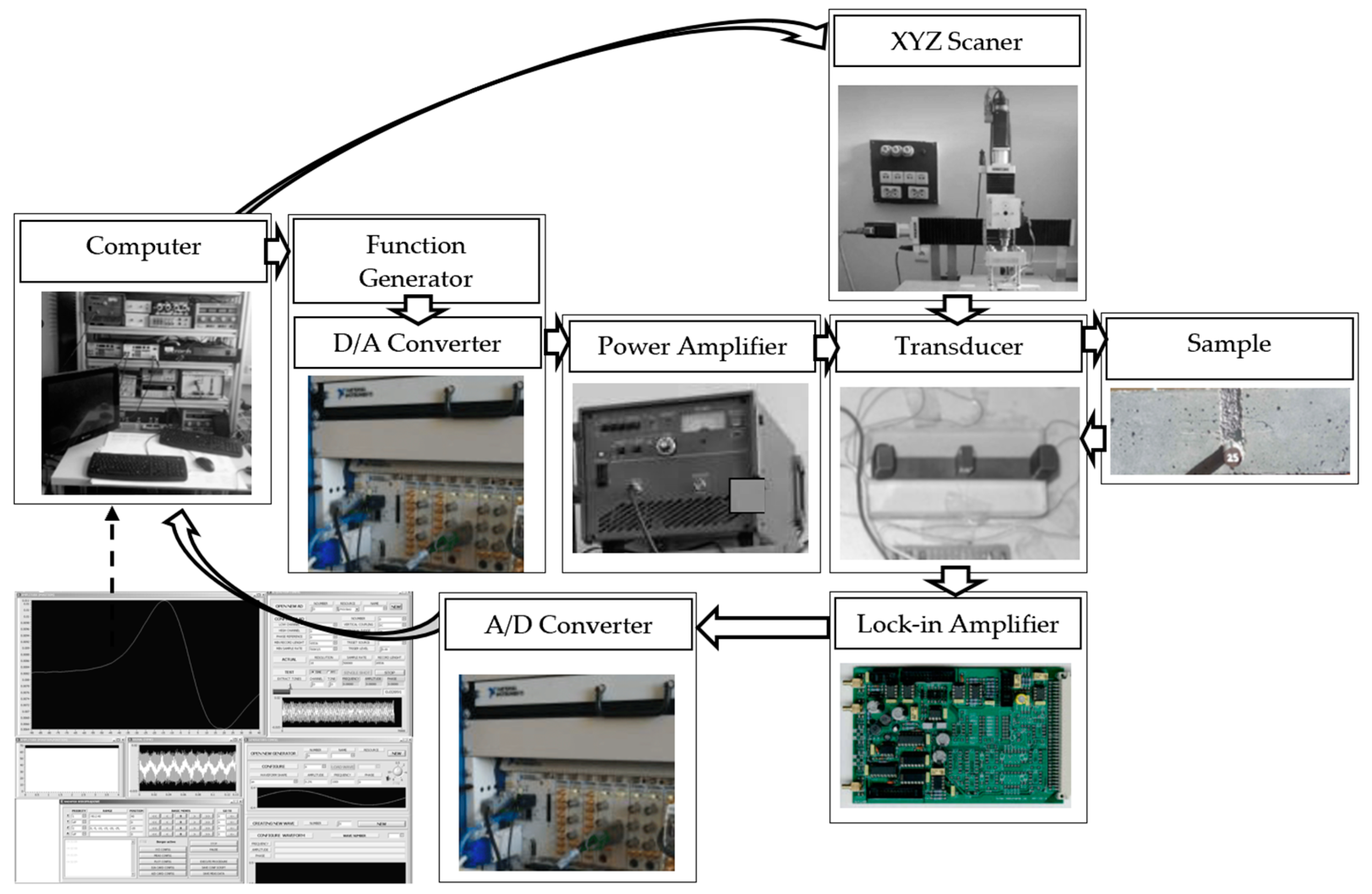
2.2.2. Comparison of Measuring Systems
- Transducer size: a larger transducer size results in lower spatial resolution and higher effective range.
- Excitation frequency: a lower frequency results in lower spatial resolution and higher effective range.
- Magnetic induction (B).
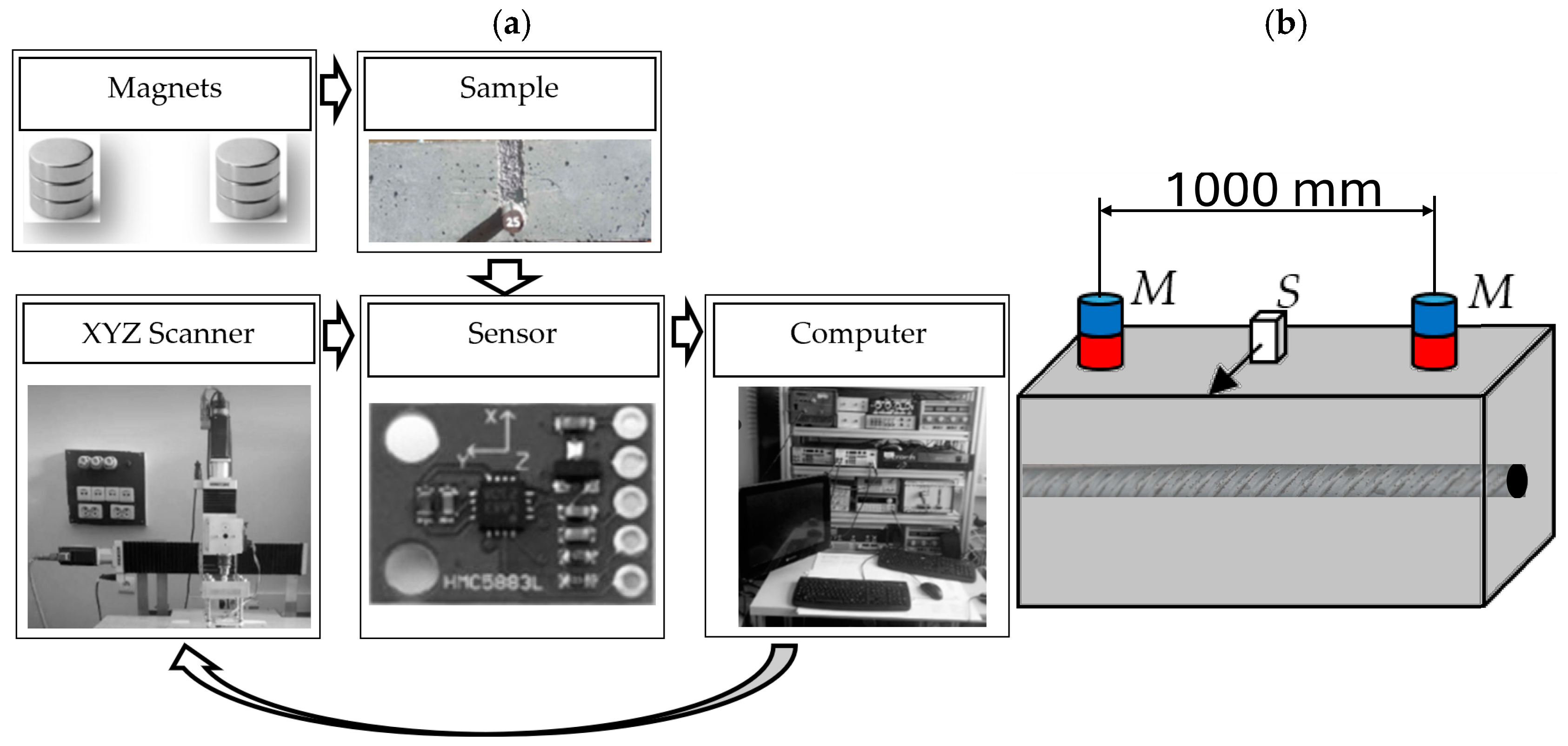
- The excitation system consists of two neodymium magnets. These strong magnets effectively magnetize the reinforcing bars, eventually producing a significantly stronger signal than the EC method.
- The high distance between the magnets and the transducer (500 mm) significantly limits direct interaction. In this method, the only adjustable parameters are the strength of the magnets and the distance between them (Figure 12b). This setup also facilitates the development of an area-testing transducer [41];
- The stationary magnets are placed directly above the tested rebar (no movement during measurement). This minimizes the influence of neighbor rebars in the reinforcement grid on measurement results, allowing for effective measurements even at much greater distances than those achievable with EC.
3. Results
3.1. Initial Measurements
3.1.1. Measurements in Eddy Current and Magnetic Experiments
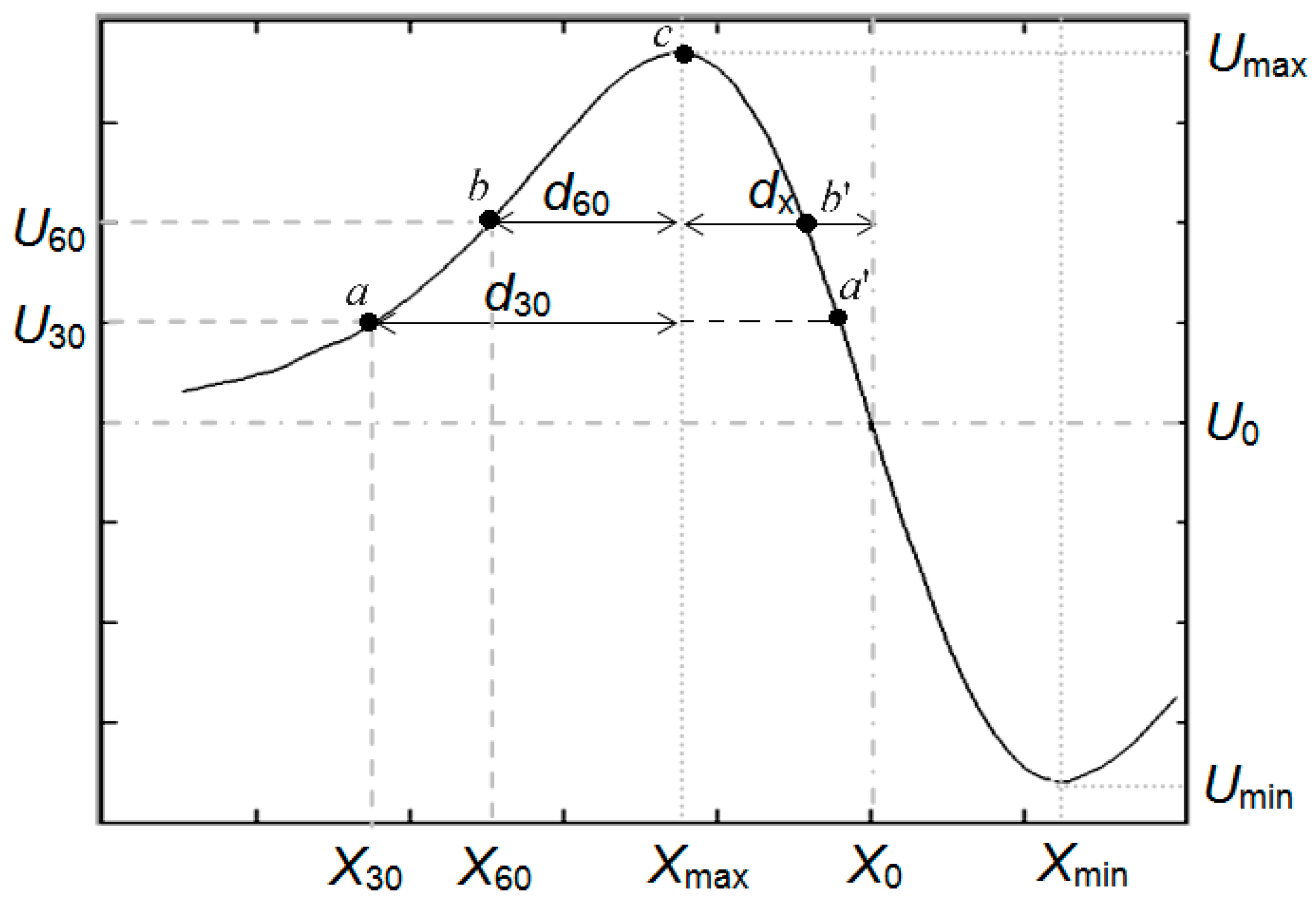
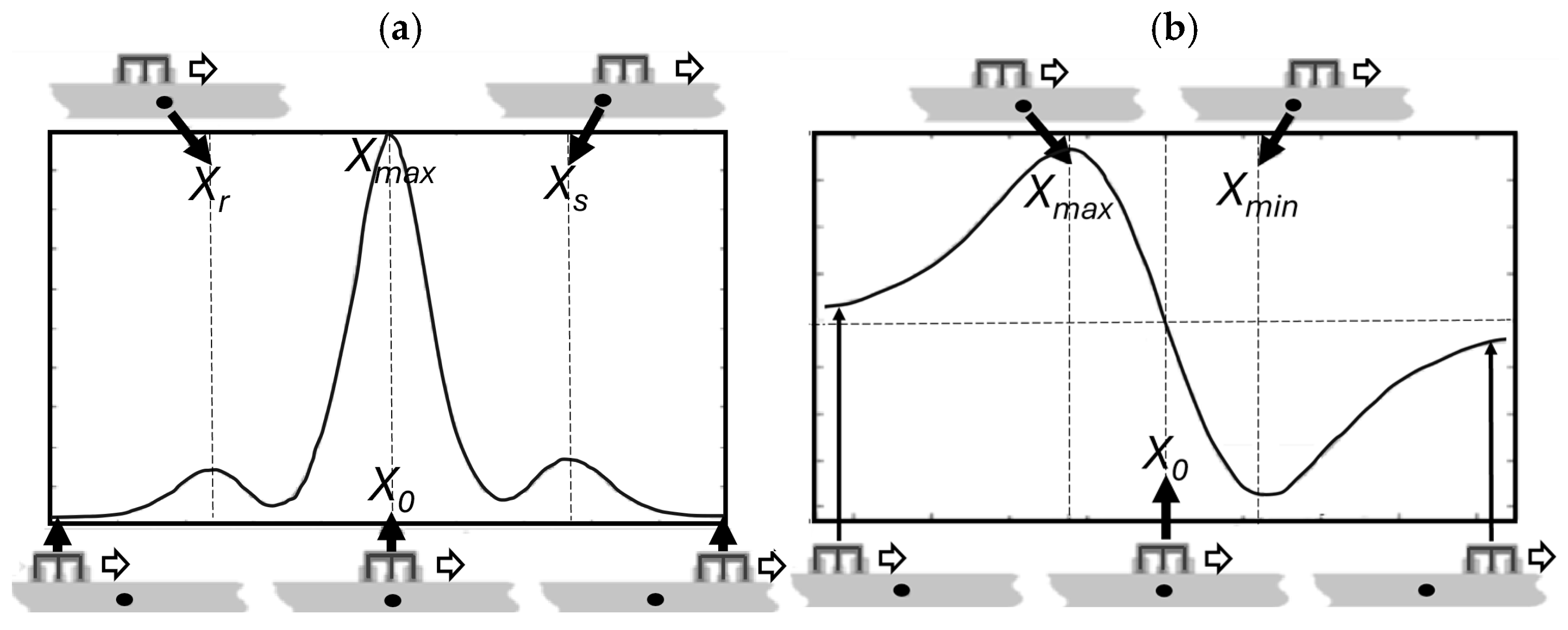
3.1.2. Features Extraction from Measurement Waveforms
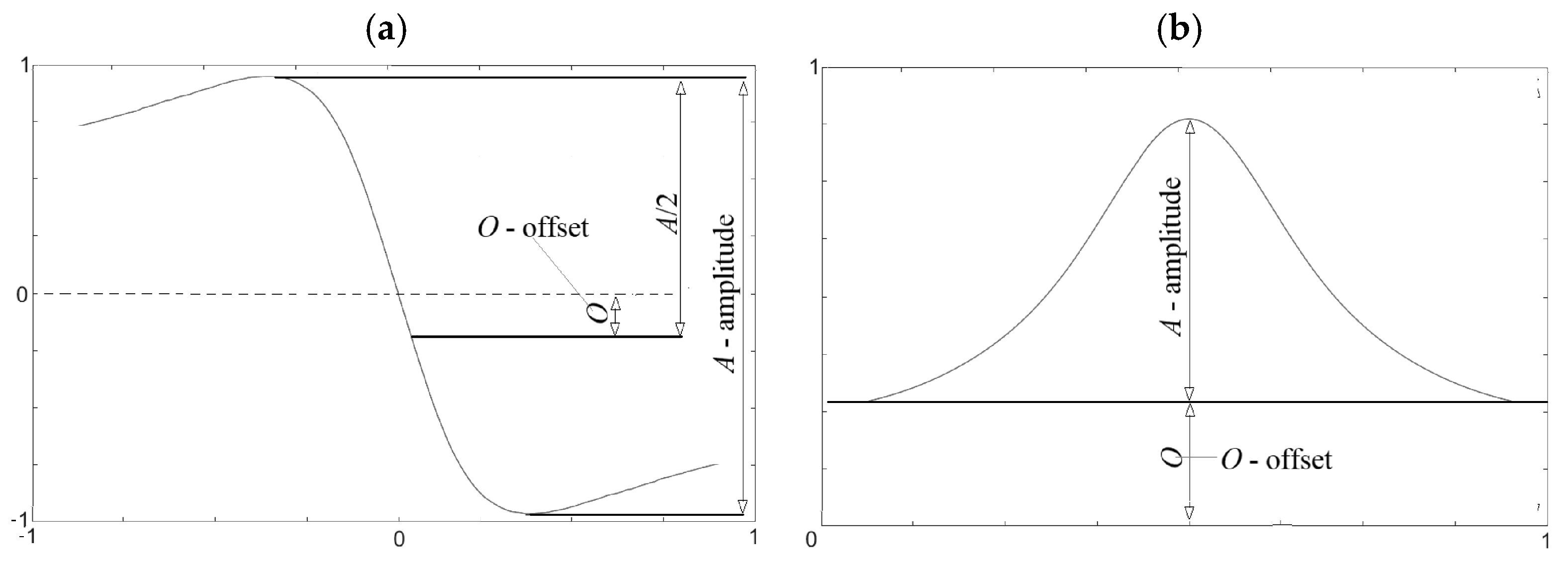
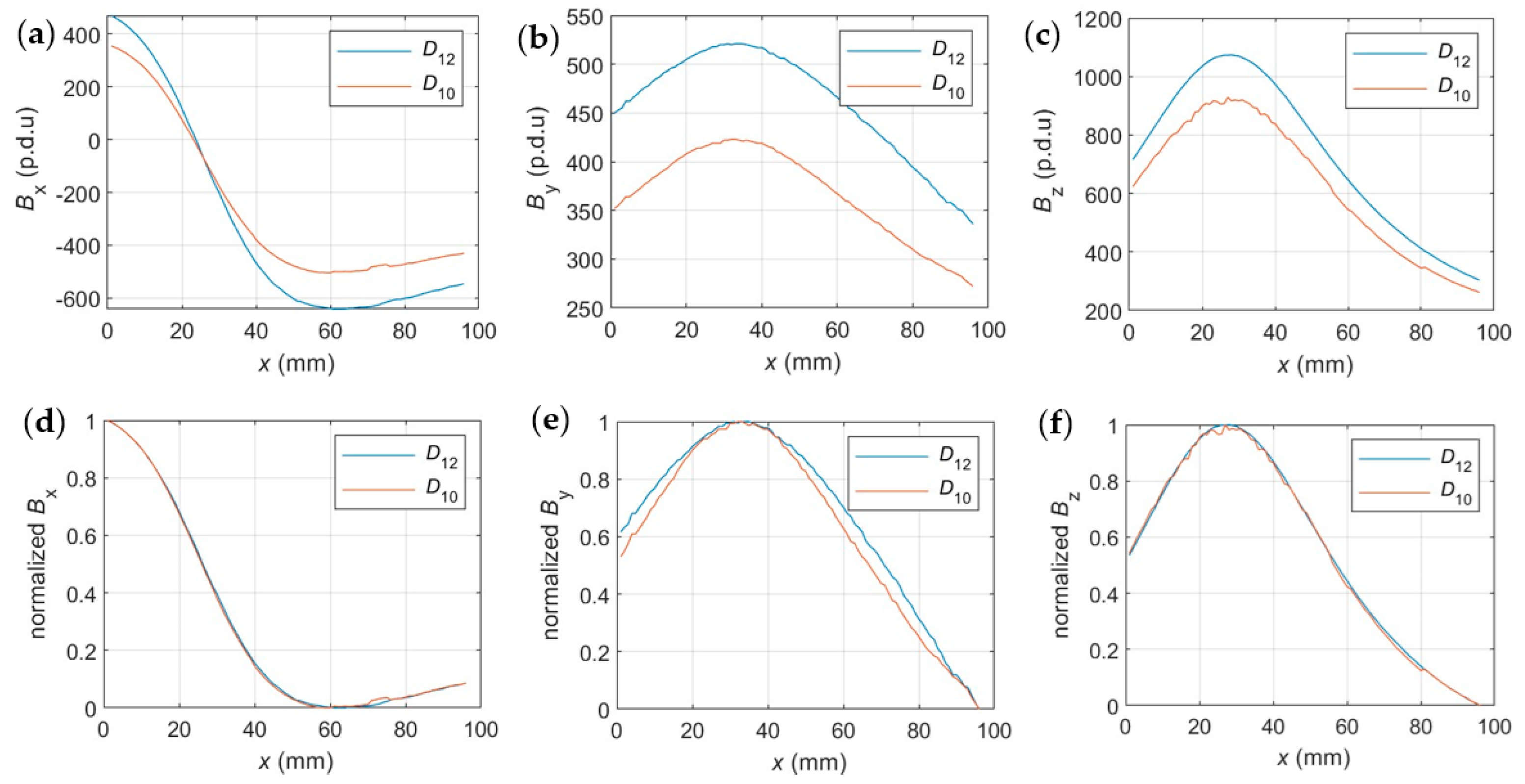
- Unlike the EC waveforms, the magnetic measurements display an offset that can be utilized as a distinct attribute;
- Attributes obtained from the Bx component (MFL method) and magnitude (EC method) can be determined using the same approach (presented in Figure 5);
- For spatial components By and Bz, the equal intervals in the domain of amplitude method were employed to extract attributes.
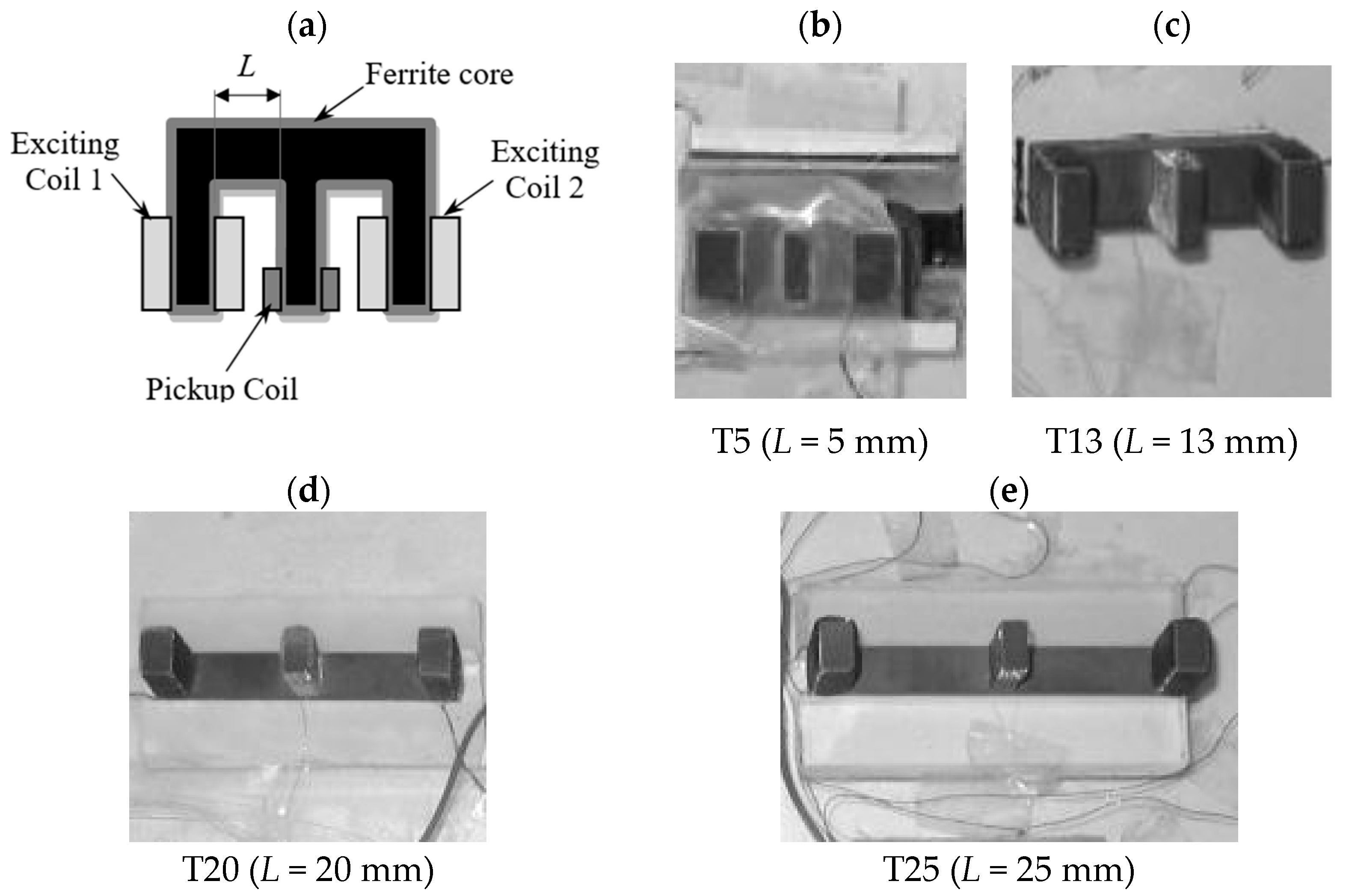
3.1.3. Transducers
3.2. Parameter Identification
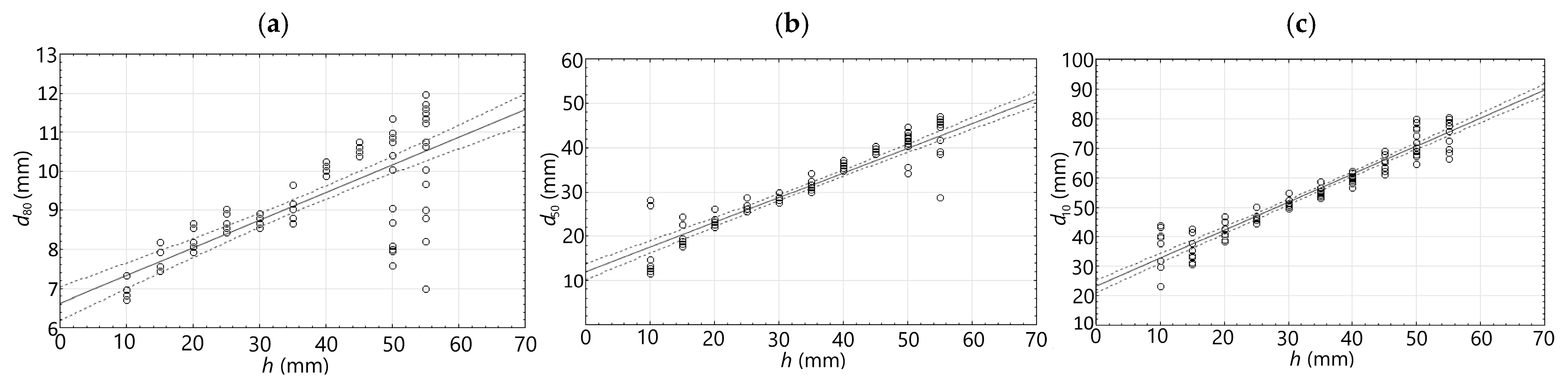
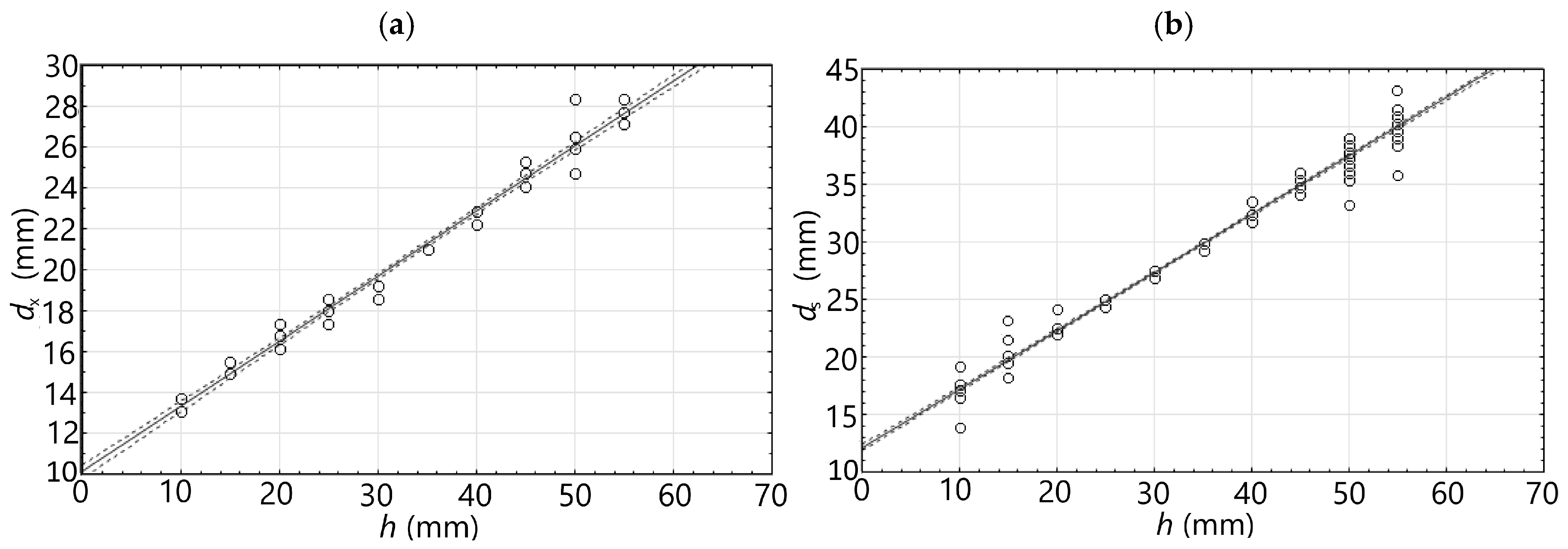
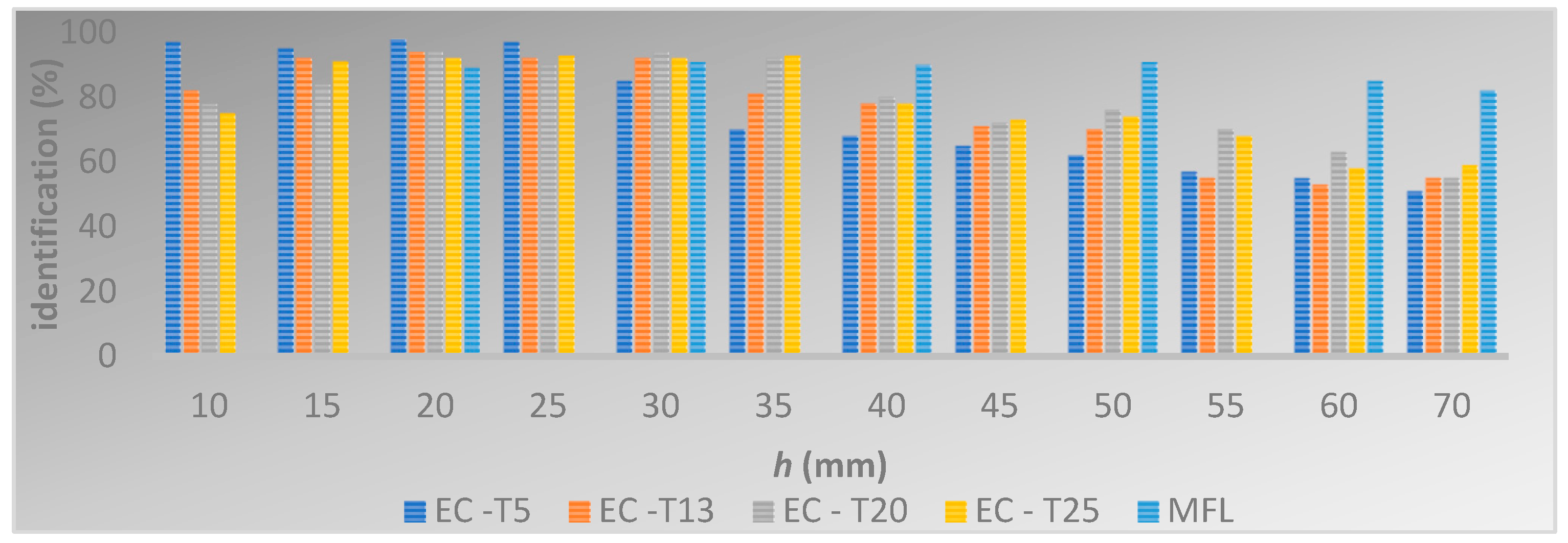
3.2.1. Concrete Cover Thickness
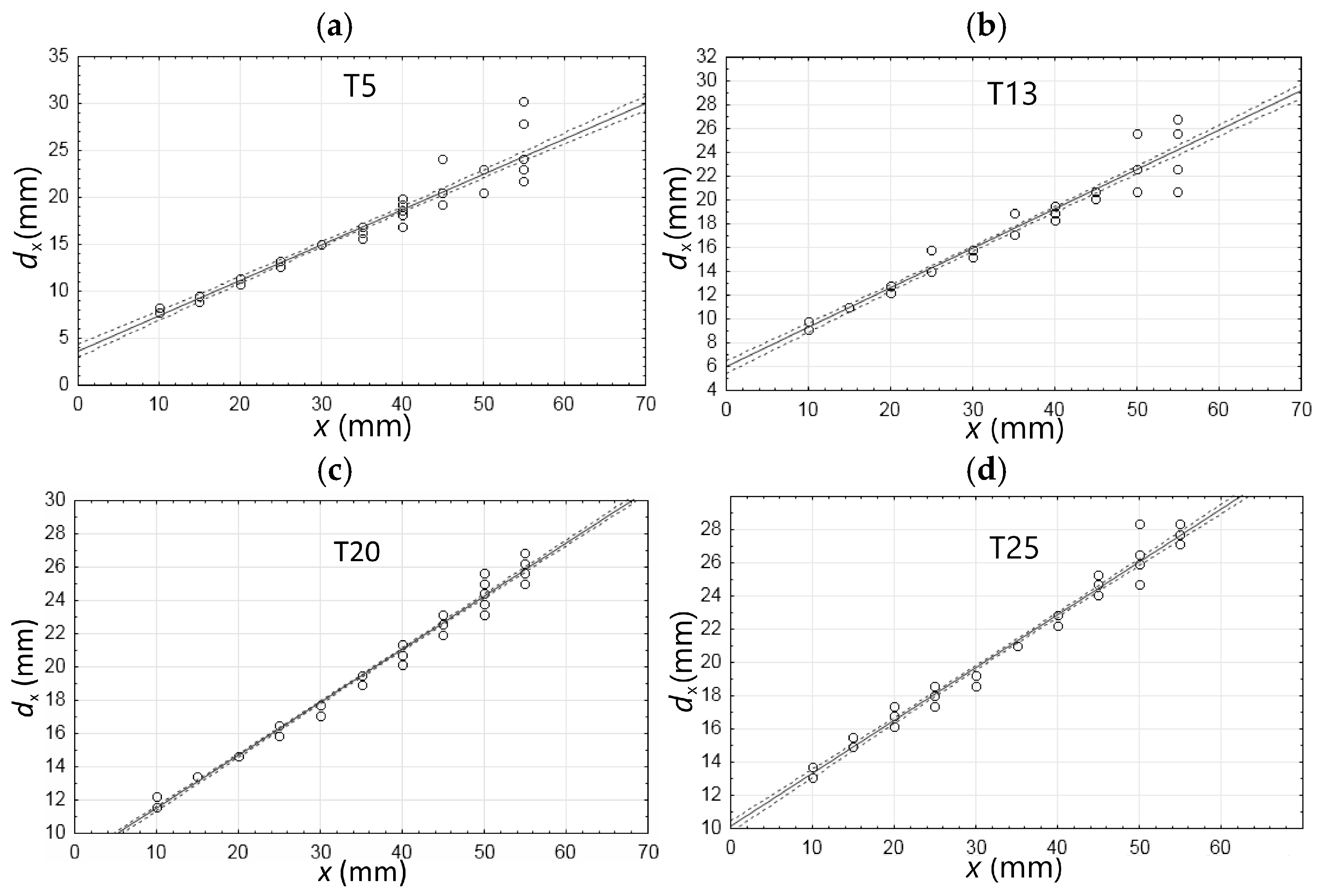
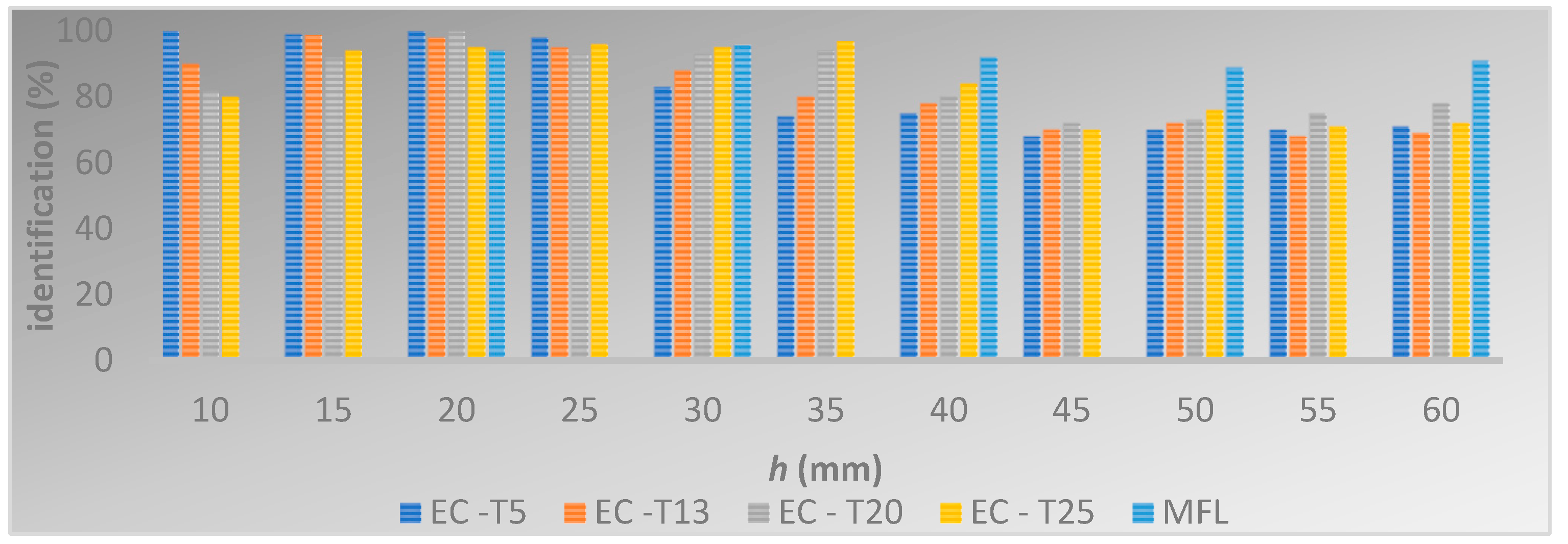
3.2.2. Rebar Diameter
3.2.3. Reinforced Steel Class
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- PN-B-03264:2002; Concrete, Reinforced Concrete and Prestressed Structures. Static Calculations and Design. PKN: Warsaw, Poland, 2002.
- Smith, D.G.E.; Brown, R.H. Reinforced Concrete Design, 10th ed.; Mercury Learning and Information: Herndon, VA, USA, 2021; ISBN 9781683929079. [Google Scholar]
- Mosley, B.; Hulse, R.; Bungey, J. Reinforced Concrete Design: To Eurocode 2; Palgrave Macmillan: London, UK, 2012; ISBN 9780230302853. [Google Scholar]
- Drobiec, Ł.; Jasiński, R.; Piekarczyk, A. Diagnostyka Konstrukcji Żelbetowych; PWN: Warszawa, Poland, 2010; Volume 1, ISBN 978-83-01-16103-3. [Google Scholar]
- Zybura, A.; Jaśniok, A.; Jaśniok, T. Diagnostyka Konstrukcji Żelbetowych; PWN: Warszawa, Poland, 2021; Volume 2, ISBN 978-83-01-16698-4. [Google Scholar]
- Frankowski, P.K.; Chady, T.; Zieliński, A. Magnetic force induced vibration evaluation (M5) method for frequency analysis of rebar-debonding in reinforced concrete. Measurement 2021, 182, 109655. [Google Scholar] [CrossRef]
- Masoumi, F.; Akgül, F.; Mehrabzadeh, A. Condition Assessment of Reinforced Concrete Bridges by Combined Nondestructive Test Techniques. Int. J. Eng. Technol. 2013, 5, 708–711. [Google Scholar] [CrossRef]
- Verma, S.K.; Bhadauria, S.S.; Akhtar, S. Review of Nondestructive testing methods for condition monitoring of concrete structures. J. Constr. Eng. 2013, 2013, 834572. [Google Scholar] [CrossRef]
- Bui, H.; Delattre, F.; Levacher, D. Experimental Methods to Evaluate the Carbonation Degree in Concrete—State of the Art Review. Appl. Sci. 2023, 13, 2533. [Google Scholar] [CrossRef]
- Wiwatrojanagul, P.; Sahamitmongkol, R.; Tangtermsirikul, S.; Khamsemanan, N. A new method to determine locations of rebars and estimate cover thickness of RC structures using GPR data. Constr. Build. Mater. 2017, 140, 257–273. [Google Scholar] [CrossRef]
- Dinh, K.; Gucunski, N.; Duong, T.H. An algorithm for automatic localization and detection of rebars from GPR data of concrete bridge decks. Autom. Constr. 2018, 89, 292–298. [Google Scholar] [CrossRef]
- Mechbal, Z.; Khamlichi, A. Determination of concrete rebars characteristics by enhanced post-processing of GPR scan raw data. NDT E Int. 2017, 89, 30–39. [Google Scholar] [CrossRef]
- Dinh, K.; Gucunski, N.; Duong, T.H. Migration-based automated rebar picking for condition assessment of concrete bridge decks with ground penetrating radar. NDT E Int. 2018, 98, 45–54. [Google Scholar] [CrossRef]
- Dong, B.; Shi, G.; Dong, P.; Ding, W.; Teng, X.; Qin, S.; Liu, Y.; Xing, F.; Hong, S. Visualized tracing of rebar corrosion evolution in concrete with x-ray micro-computed tomography method. Cem. Concr. Compos. 2018, 92, 102–109. [Google Scholar] [CrossRef]
- Sadowski, L. Methodology for Assessing the Probability of Corrosion in Concrete Structures on the Basis of Half-Cell Potential and Concrete Resistivity Measurements. Sci. World J. 2013, 2013, 714501. [Google Scholar] [CrossRef]
- Gu, P.; Beaudoin, J.J. Obtaining Effective Half-Cell Potential Measurements in Reinforced Concrete Structures; Construction Technology Updates; National Research Council of Canada: Ottawa, ON, Canada, 1998; ISSN 1206-1220.
- Nguyen, A.; Klysz, G.; Deby, F.; Balayssac, J. Assessment of the electrochemical state of steel reinforcement in water saturated concrete by resistivity measurement. Constr. Build. Mater. 2018, 171, 455–466. [Google Scholar] [CrossRef]
- Lim, Y.-C.; Noguchi, T.; Cho, C.-G. A quantitative analysis of the geometric effects of reinforcement in concrete resistivity measurement above reinforcement. Constr. Build. Mater. 2015, 83, 189–193. [Google Scholar] [CrossRef]
- Lim, Y.-C.; Noguchi, T.; Cho, C.-G. Mathematical modeling for quantitative estimation of geometric effects of nearby rebar in electrical resistivity measurement. Cem. Concr. Compos. 2018, 90, 82–88. [Google Scholar] [CrossRef]
- International Atomic Energy Agency. Training Course SERIES No. 17: Guidebook on Non-Destructive Testing of Concrete Structures, Vienna: International Atomic Energy Agency. 2002. Available online: https://www-pub.iaea.org/MTCD/Publications/PDF/TCS-17_web.pdf (accessed on 27 October 2024).
- Ikumapayi, C.M.; Adeniji, A.A.; Obisesan, A.A.; Odeyemi, O.; Ajayi, J.A. Effects of Carbonation on the Properties of Concrete. Sci. Rev. 2019, 5, 205–214. [Google Scholar] [CrossRef]
- Szymanik, B.; Chady, T.; Frankowski, P.K. Inspection of reinforcement concrete structures with active infrared thermography. In 43rd Annual Review of Progress in Quantitative Non-Destructive Evaluation; AIP: Melville, NY, USA, 2017; Volume 36, ISBN 9780735414747. [Google Scholar] [CrossRef]
- Keo, S.A.; Szymanik, B.; Le Roy, C.; Brachelet, F.; Defer, D. Defect Detection in CFRP Concrete Reinforcement Using the Microwave Infrared Thermography (MIRT) Method—A Numerical Modeling and Experimental Approach. Appl. Sci. 2023, 13, 8393. [Google Scholar] [CrossRef]
- Szymanik, B.; Keo, S.A.; Brachelet, F.; Defer, D. Investigation of Carbon Fiber Reinforced Polymer Concrete Reinforcement Ageing Using Microwave Infrared Thermography Method. Appl. Sci. 2024, 14, 4331. [Google Scholar] [CrossRef]
- Ohtsu, M.; Isoda, T.; Tomoda, Y. Acoustic Emission Techniques Standardized for Concrete Structures. Acoustic Emission Group. 2007. Available online: https://www.ndt.net/article/jae/papers/25-021.pdf (accessed on 27 October 2024).
- Oshita, H. 9—Quantitative estimation of rebar corrosion in reinforced concrete by thermography. In Acoustic Emission and Related Non-Destructive Evaluation Techniques in the Fracture Mechanics of Concrete; Fundamentals and Applications; Woodhead Publishing Series in Civil and Structural Engineering; Woodhead Publishing: Cambridge, UK, 2015; pp. 177–203. [Google Scholar] [CrossRef]
- Dixit, M.; Gupta, A.K. A Review of Different Assessment Methods of Corrosion of Steel Reinforcement in Concrete. Iran. J. Sci. Technol. Trans. Civ. Eng. 2022, 46, 735–752. [Google Scholar] [CrossRef]
- Laureti, S.; Ricci, M.; Mohamed, M.; Senni, L.; Davis, L.; Hutchins, D. Detection of rebars in concrete using advanced ultrasonic pulse compression techniques. Ultrasonics 2018, 85, 31–38. [Google Scholar] [CrossRef]
- Mayakuntla, P.K.; Ganguli, A.; Smyl, D. Gaussian Mixture Model-Based Classification of Corrosion Severity in Concrete Structures Using Ultrasonic Imaging. J. Nondestruct. Eval. 2023, 42, 28. [Google Scholar] [CrossRef]
- Mayakuntla, P.K.; Ghosh, D.; Ganguli, A. Nondestructive evaluation of rebar corrosion in concrete structures using ultrasonics and laser-based sensing. Nondestruct. Test. Eval. 2021, 37, 297–314. [Google Scholar] [CrossRef]
- Ghosh, D.; Kumar, R.; Ganguli, A.; Mukherjee, A. Nondestructive Evaluation of Rebar Corrosion-Induced Damage in Concrete through Ultrasonic Imaging. J. Mater. Civ. Eng. 2020, 32, 04020294. [Google Scholar] [CrossRef]
- Gunes, B.; Gunes, O. Vibration-Based Damage Evaluation of a Reinforced Concrete Frame Subjected to Cyclic Pushover Testing. Shock. Vib. 2021, 2021, 6666702. [Google Scholar] [CrossRef]
- Caballol, D.; Raposo, P.; Gil-Carrillo, F. Non-destructive testing of concrete layer adhesion by means of vibration measurement. Constr. Build. Mater. 2023, 411, 134548. [Google Scholar] [CrossRef]
- Szymanik, B.; Frankowski, P.K.; Chady, T.; Chelliah, C.R.A.J. Detection and Inspection of Steel Bars in Reinforced Concrete Structures Using Active Infrared Thermography with Microwave Excitation and Eddy Current Sensors. Sensors 2016, 16, 234. [Google Scholar] [CrossRef] [PubMed]
- Chady, T.; Frankowski, P. Electromagnetic Evaluation of Reinforced Concrete Structure. In Proceedings of the Review of Progress in Quantitative Non-Destructive Evaluation, Denver, CO, USA, 15–20 July 2012; Volume 32, pp. 1355–1362. [Google Scholar] [CrossRef]
- Frankowski, P.K. Eddy current method for identification and analysis of reinforcement bars in concrete structures. In Proceedings of the Electrodynamic and Mechatronic Systems, Opole, Poland, 6–8 October 2011; pp. 105–109. [Google Scholar] [CrossRef]
- Alcantara, N. Identification of steel bars immersed in reinforced concrete based on experimental results of eddy current testing and artificial neural network analysis. Nondestruct. Test. Eval. 2013, 28, 58–71. [Google Scholar] [CrossRef]
- Xia, Z.; Huang, R.; Chen, Z.; Yu, K.; Zhang, Z.; Salas-Avila, J.R.; Yin, W. Eddy Current Measurement for Planar Structures. Sensors 2022, 22, 8695. [Google Scholar] [CrossRef]
- Drobiec, Ł.; Jasiński, R.; Mazur, W. Accuracy of Eddy-Current and Radar Methods Used in Reinforcement Detection. Materials 2019, 12, 1168. [Google Scholar] [CrossRef]
- Frankowski, P.K.; Chady, T. Evaluation of Reinforced Concrete Structures with Magnetic Method and ACO (Amplitude-Correlation-Offset) Decomposition. Materials 2023, 16, 5589. [Google Scholar] [CrossRef]
- Frankowski, P.K.; Chady, T. Multisensory Spatial Analysis and NDT Active Magnetic Method for Quick Area Testing of Reinforced Concrete Structures. Materials 2023, 16, 7296. [Google Scholar] [CrossRef]
- Bektaş, Ö.; Kurban, Y.; Özboylan, B. Development of magnetic flux leakage device as a non-destructive method for structural reinforcement detection. Mater. Constr. 2022, 72, e273. [Google Scholar] [CrossRef]
- Li, V.; Demina, L.; Vlasenko, S. Detecting the Diameter and the Depth of Steel Reinforcing Bar in Concrete Using MFL Method. Int. J. Appl. Sci. Curr. Future Res. Trends 2022, 15, 120–128. [Google Scholar] [CrossRef]
- Frankowski, P.K.; Majzner, P.; Mąka, M.; Stawicki, T.; Chady, T. Magnetic Non-Destructive Evaluation of Reinforced Concrete Structures—Methodology, System, and Identification Results. Appl. Sci. 2024, 14, 11695. [Google Scholar] [CrossRef]
- Frankowski, P.K. Corrosion detection and measurement using eddy current method. In Proceedings of the 2018 International Interdisciplinary PhD Workshop (IIPhDW), Swinoujście, Poland, 9–12 May 2018. [Google Scholar] [CrossRef]
- Eddy, I.; Underhill, P.R.; Morelli, J.; Krause, T.W. Pulsed Eddy Current Response to General Corrosion in Concrete Rebar. J. Nondestruct. Eval. Diagn. Progn. Eng. Syst. 2020, 3, 044501. [Google Scholar] [CrossRef]
- Alcantara, N.P.; Da Silva, F.M.; Guimarães, M.T.; Pereira, M.D. Corrosion Assessment of Steel Bars Used in Reinforced Concrete Structures by Means of Eddy Current Testing. Sensors 2016, 16, 15. [Google Scholar] [CrossRef] [PubMed]
- Tsukada, K.; Yoshioka, M.; Kiwa, T.; Hirano, Y. A magnetic flux leakage method using a magnetoresistive sensor for nondestructive evaluation of spot welds. NDT E Int. 2011, 44, 101–105. [Google Scholar] [CrossRef]
- Rehmat, A.; Sadeghnejad, A.C. Valikhani and others: Magnetic Flux Leakage Method for Detecting Corrosion in Post Tensioned Segmental Concrete Bridges in Presence of Secondary Reinforcement. In Proceedings of the Conference: Transportation Research Board 96th Annual Meeting, Washington, DC, USA, 8–12 January 2017; pp. 8–12. [Google Scholar]
- Zhang, H.; Liao, L.; Zhao, R.; Zhou, J.; Yang, M.; Zhao, Y. A new judging criterion for corrosion testing of reinforced concrete based on self-magnetic flux leakage. Int. J. Appl. Electromagn. Mech. 2017, 54, 123–130. [Google Scholar] [CrossRef]
- Shams, S.; Ghorbanpoor, A.; Lin, S.; Azari, H. Nondestructive Testing of Steel Corrosion in Prestressed Concrete Structures using the Magnetic Flux Leakage System. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 132–144. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, S.; Deng, Z.; Tang, R.; Ma, W.; Tian, X.; Kang, Y.; He, L. Magnetic flux leakage structural health monitoring of concrete rebar using an open electromagnetic excitation technique. Struct. Health Monit. 2018, 17, 121–134. [Google Scholar] [CrossRef]
- Perin, D.; Göktepe, M. Inspection of rebars in concrete blocks. Int. J. Appl. Electromagn. Mech. 2012, 38, 65–78. [Google Scholar] [CrossRef]
- He, D.; Shiwa, M.; Takaya, S.; Tsuchiya, K. Steel reinforcing bar detection using electromagnetic method. In Proceedings of the 2016 Progress in Electromagnetic Research Symposium (PIERS), Shanghai, China, 8–11 August 2016. [Google Scholar] [CrossRef]
- Diederich, H.; Vogel, T. Evaluation of Reinforcing Bars Using the Magnetic Flux Leakage Method. J. Infrastruct. Syst. 2017, 23, B4016001. [Google Scholar] [CrossRef]
- Frankowski, P.K.; Chady, T. Impact of Magnetization on the Evaluation of Reinforced Concrete Structures Using DC Magnetic Methods. Materials 2022, 15, 857. [Google Scholar] [CrossRef] [PubMed]
- Shearer, C. The CRISP-DM model: The new blueprint for data mining. J. Data Warehous. 2000, 5, 13–22. [Google Scholar]
- Pawlak, Z. Rough sets. Int. J. Comput. Inf. Sci. 1982, 11, 341–356. [Google Scholar] [CrossRef]
- Pawlak, Z.; Skowron, A. Rough Set Theory and Its Applications to Data Mining. In Data Mining and Knowledge Discovery; Springer: Berlin/Heidelberg, Germany, 1998; pp. 1–10. [Google Scholar]
- Agrawal, R.; Mannila, H.; Srikant, R.; Toivonen, H.; Verkamo, A.I. Fast discovery of association rules. In Advances in Knowledge Discovery and Data Mining; Fayyad, U.M., Piatetsky-Shapiro, G., Smyth, P., Uthurusamy, R., Eds.; AAAI Press: Washington, DC, USA, 2021; pp. 307–328. [Google Scholar]
- Toivonen, H. Apriori Algorithm. In Encyclopedia of Machine Learning and Data Mining; Sammut, C., Webb, G.I., Eds.; Springer: Boston, MA, USA, 2017; p. 60. [Google Scholar] [CrossRef]
- Tirumalasetty, S.; Aruna, A.; Padmini, A.; Sagaru, D.V.; Tejeswini, A. An Enhanced Apriori with Interestingness of Patterns using cSupport and rSupport. Int. J. Comput. Sci. Mob. Comput. 2021, 10, 20–27. [Google Scholar] [CrossRef]
- Tirumalasetty, S.; Jadda, A.; Edara, S.R. An Enhanced Apriori Algorithm for Discovering Frequent Patterns with Optimal Number of Scans. arXiv 2015. [Google Scholar] [CrossRef]
- McCann, D.; Forde, M. Review of NDT methods in the assessment of concrete and masonry structures. NDT E Int. 2001, 34, 71–84. [Google Scholar] [CrossRef]
- Grochowalski, J.M.; Chady, T. Rapid Identification of Material Defects Based on Pulsed Multifrequency Eddy Current Testing and the k-Nearest Neighbor Method. Materials 2023, 16, 6650. [Google Scholar] [CrossRef]
- Grochowalski, J.M.; Chady, T. Pulsed Multifrequency Excitation and Spectrogram Eddy Current Testing (PMFES-ECT) for Nondestructive Evaluation of Conducting Materials. Materials 2021, 14, 5311. [Google Scholar] [CrossRef]
- Chady, T.; Grochowalski, J.M. Eddy Current Transducer with Rotating Permanent Magnets to Test Planar Conducting Plates. Sensors 2019, 19, 1408. [Google Scholar] [CrossRef]
- Grochowalski, J.M.; Chady, T. Numerical analysis of eddy current transducer with rotating permanent magnets for planar conducting plates testing. In Proceedings of the 2018 International Interdisciplinary PhD Workshop (IIPhDW), Swinoujscie, Poland, 9–12 May 2018. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, Y.; Sun, M. An Improved Apriori Algorithm Based on an Evolution-Communication Tissue-Like P System with Promoters and Inhibitors. Discret. Dyn. Nat. Soc. 2017, 2017, 6978146. [Google Scholar] [CrossRef]
- Honeywell. HMC5883L-TR Datasheet. Available online: https://www.allaboutcircuits.com/electronic-components/datasheet/HMC5883L-TR--Honeywell/ (accessed on 29 October 2024).
- Frankowski, P.K.; Chady, T. A Comparative Analysis of the Magnetization Methods Used in the Magnetic Nondestructive Testing of Reinforced Concrete Structures. Materials 2023, 16, 7020. [Google Scholar] [CrossRef] [PubMed]







| Feature | EC method—magnitude waveform | MFL method—Bx waveform | ||||||||
| Change | ↑ | ↑ | ↑ | ↑ | ↑ | ↑ | ↑ | ↑ | ↑ | ↑ |
| Confidence (%) | 75 | 85 | 80 | 72 | 60 | 52 | 65 | 71 | 63 | 52 |
| Support (%) | 33 | 33 | 33 | 33 | 33 | 14 | 14 | 14 | 14 | 14 |
| Feature | MFL method—By waveform | MFL method—Bz waveform | ||||||||
| Change | ↑ | ↑ | ↑ | ↑ | ↑ | ↑ | ↑ | ↑ | ↑ | ↑ |
| Confidence (%) | 63 | 74 | 75 | 69 | 55 | 53 | 67 | 69 | 62 | 54 |
| Support (%) | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 |
| P5 | P13 | P20 | P25 | |
|---|---|---|---|---|
| dx | 3.67 + 0.38 h | 7.56 + 0.33 h | 8.30 + 0.32 h | 10.12 + 0.32 h |
| R | 96.621% | 96.998% | 99.555% | 99.248% |
| 10 mm | 15 mm | 20 mm | 25 mm | 30 mm | |||||||||||
| R | R | R | R | R | |||||||||||
| P5 | 8.0 | 0.32 | 0.6 | 9.4 | 0.25 | 0.6 | 11.2 | 0.31 | 0.6 | 13.0 | 0.29 | 0.6 | 15.0 | 0 | 0 |
| P13 | 11.0 | 0.32 | 0.6 | 12.5 | 0 | 0 | 14.0 | 0.32 | 0.6 | 16.2 | 0.92 | 1.8 | 16.5 | 0.85 | 2.1 |
| P20 | 11.7 | 0.18 | 0.6 | 13.4 | 0 | 0 | 14.6 | 0 | 0 | 16.2 | 0.32 | 0.6 | 17.6 | 0.18 | 0.6 |
| P25 | 13.4 | 0.33 | 0.6 | 15.3 | 0.33 | 0.6 | 16.7 | 0.42 | 1.2 | 18.1 | 0.42 | 1.2 | 19.1 | 0.23 | 0.6 |
| 35 mm | 40 mm | 45 mm | 50 mm | 55 mm | |||||||||||
| R | R | R | R | R | |||||||||||
| P5 | 16.3 | 0.55 | 1.2 | 18.4 | 0.92 | 3.1 | 20.4 | 1.39 | 4.9 | 21.4 | 1.23 | 2.4 | 26.2 | 3.50 | 8.5 |
| P13 | 19.3 | 0.92 | 1.8 | 20.2 | 0.49 | 1.2 | 21.7 | 0.25 | 0.6 | 24.5 | 2.20 | 4.9 | 25.6 | 2.32 | 6.1 |
| P20 | 19.2 | 0.32 | 0.6 | 20.7 | 0.27 | 1.2 | 22.7 | 0.37 | 1.2 | 24.3 | 0.81 | 2.4 | 26.3 | 0.57 | 1.8 |
| P25 | 21.0 | 0 | 0 | 22.6 | 0.33 | 0.6 | 24.5 | 0.46 | 1.2 | 26.0 | 1.25 | 3.7 | 28.1 | 0.48 | 1.2 |
| Feature | EC—magnitude | MFL—BX waveform | ||||||||
| A | A | O | ||||||||
| Change | ↓ | ↑ | ↑ | ↓ | - | ↑ | ↑ | |||
| Confidence (%) | 100 | 95 | 93 | 100 | 100 | 100 | 98 | |||
| Support (%) | 50 | 50 | 50 | 57 | 57 | 57 | 57 | |||
| Feature | MFL—BY waveform | MFL—BZ waveform | ||||||||
| A | O | A | O | |||||||
| Change | ↓ | ↓ | ↑ | ↑ | ↓ | ↑ | ↑ | ↑ | ||
| Confidence (%) | 100 | 100 | 98 | 100 | 100 | 56 | 94 | 99 | ||
| Support (%) | 57 | 57 | 57 | 57 | 57 | 57 | 57 | 57 | ||
| h (mm) | 20 | 30 | 40 | 50 | 60 | 70 |
|---|---|---|---|---|---|---|
| Correctness of the identification (%) | 100 | 100 | 100 | 100 | 98 | 95 |
| h (mm) | 10 | 15 | 20 | 25 | 30 | 35 |
| Correctness of the identification (%) | 97 | 100 | 99 | 100 | 100 | 100 |
| h (mm) | 40 | 45 | 50 | 55 | 60 | 70 |
| Correctness of the identification (%) | 99 | 96 | 95 | 92 | 86 | 93 |
| h (mm) | 20 | 30 | 40 | 50 | 60 | 70 |
|---|---|---|---|---|---|---|
| Correctness of the identification (%) | 100 | 100 | 100 | 100 | 100 | 100 |
| Feature | EC—magnitude | MFL—BX waveform | ||||||||
| A | A | O | ||||||||
| Change | ↓ | ↑ | ↑ | ↑ | - | ↑ | ↑ | |||
| Confidence (%) | 69 | 83 | 90 | 88 | 92 | 84 | 61 | |||
| Support (%) | 33 | 33 | 33 | 57 | 57 | 57 | 57 | |||
| Feature | MFL—BY waveform | MFL—BZ waveform | ||||||||
| A | O | A | O | |||||||
| Change | ↑ | ↑ | - | ↑ | ↑ | ↑ | - | ↑ | ||
| Confidence (%) | 83 | 99 | 58 | 100 | 90 | 86 | 74 | 83 | ||
| Support (%) | 57 | 57 | 57 | 57 | 57 | 57 | 57 | 57 | ||
| Feature | EC—magnitude | MFL—BX waveform | ||||||||
| A | A | O | ||||||||
| Change | ↓ | - | - | ↑ | ↑ | - | - | |||
| Confidence (%) | 69 | 83 | 90 | 94 | 92 | 86 | 89 | |||
| Support (%) | 17 | 17 | 17 | 29 | 29 | 29 | 29 | |||
| Feature | MFL—BY waveform | MFL—BZ waveform | ||||||||
| A | O | A | O | |||||||
| Change | ↓ | ↓ | - | - | ↑ | ↑ | - | - | ||
| Confidence (%) | 52 | 57 | 78 | 87 | 99 | 100 | 85 | 91 | ||
| Support (%) | 29 | 29 | 29 | 29 | 29 | 29 | 29 | 29 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Frankowski, P.K.; Majzner, P.; Mąka, M.; Stawicki, T. Non-Destructive Evaluation of Reinforced Concrete Structures with Magnetic Flux Leakage and Eddy Current Methods—Comparative Analysis. Appl. Sci. 2024, 14, 11965. https://doi.org/10.3390/app142411965
Frankowski PK, Majzner P, Mąka M, Stawicki T. Non-Destructive Evaluation of Reinforced Concrete Structures with Magnetic Flux Leakage and Eddy Current Methods—Comparative Analysis. Applied Sciences. 2024; 14(24):11965. https://doi.org/10.3390/app142411965
Chicago/Turabian StyleFrankowski, Paweł Karol, Piotr Majzner, Marcin Mąka, and Tomasz Stawicki. 2024. "Non-Destructive Evaluation of Reinforced Concrete Structures with Magnetic Flux Leakage and Eddy Current Methods—Comparative Analysis" Applied Sciences 14, no. 24: 11965. https://doi.org/10.3390/app142411965
APA StyleFrankowski, P. K., Majzner, P., Mąka, M., & Stawicki, T. (2024). Non-Destructive Evaluation of Reinforced Concrete Structures with Magnetic Flux Leakage and Eddy Current Methods—Comparative Analysis. Applied Sciences, 14(24), 11965. https://doi.org/10.3390/app142411965