
Evaluation of BLE Star Network for Wireless Wearable Prosthesis/Orthosis Controller †

 , , , , and
, , , , and
Abstract
Featured Application
Abstract
1. Introduction
2. Background
2.1. BLE Parameter Definitions
- Connection Interval: The time between consecutive connection events of the connected devices.
- Maximum Transmission Unit (MTU): The maximum size of the data packet transferred between connected devices.
- Event Length: The time allocated within a connection interval for the data transfer to occur between the connected devices (including required interframe and subevent spaces).
2.2. Related Works
2.3. Theoretical Maximum Number of Connections
3. Materials and Methods
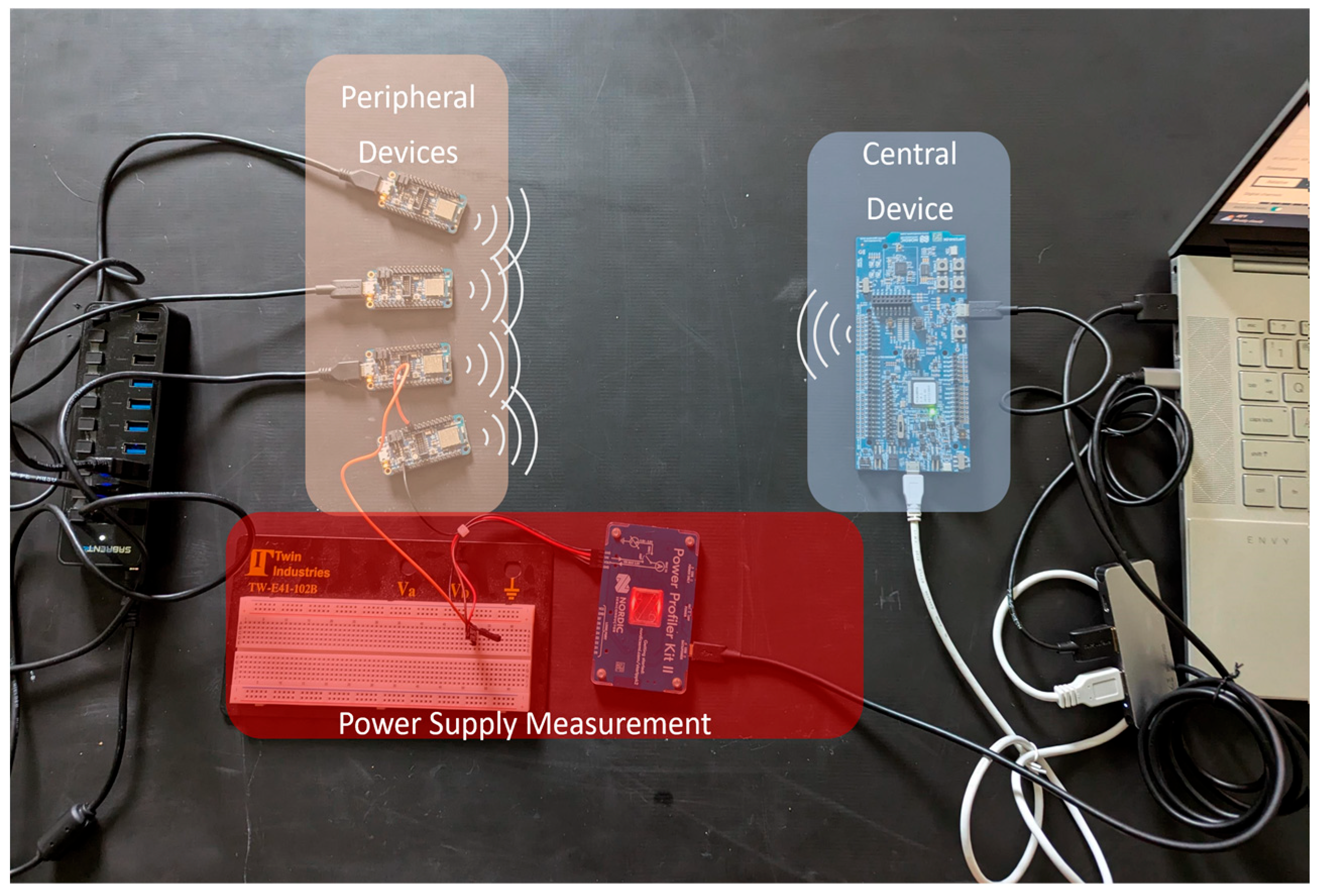
3.1. Experimental Set-Up
3.2. Measuring Maximum Number of Supported Peripheral Nodes and Power Supply Current
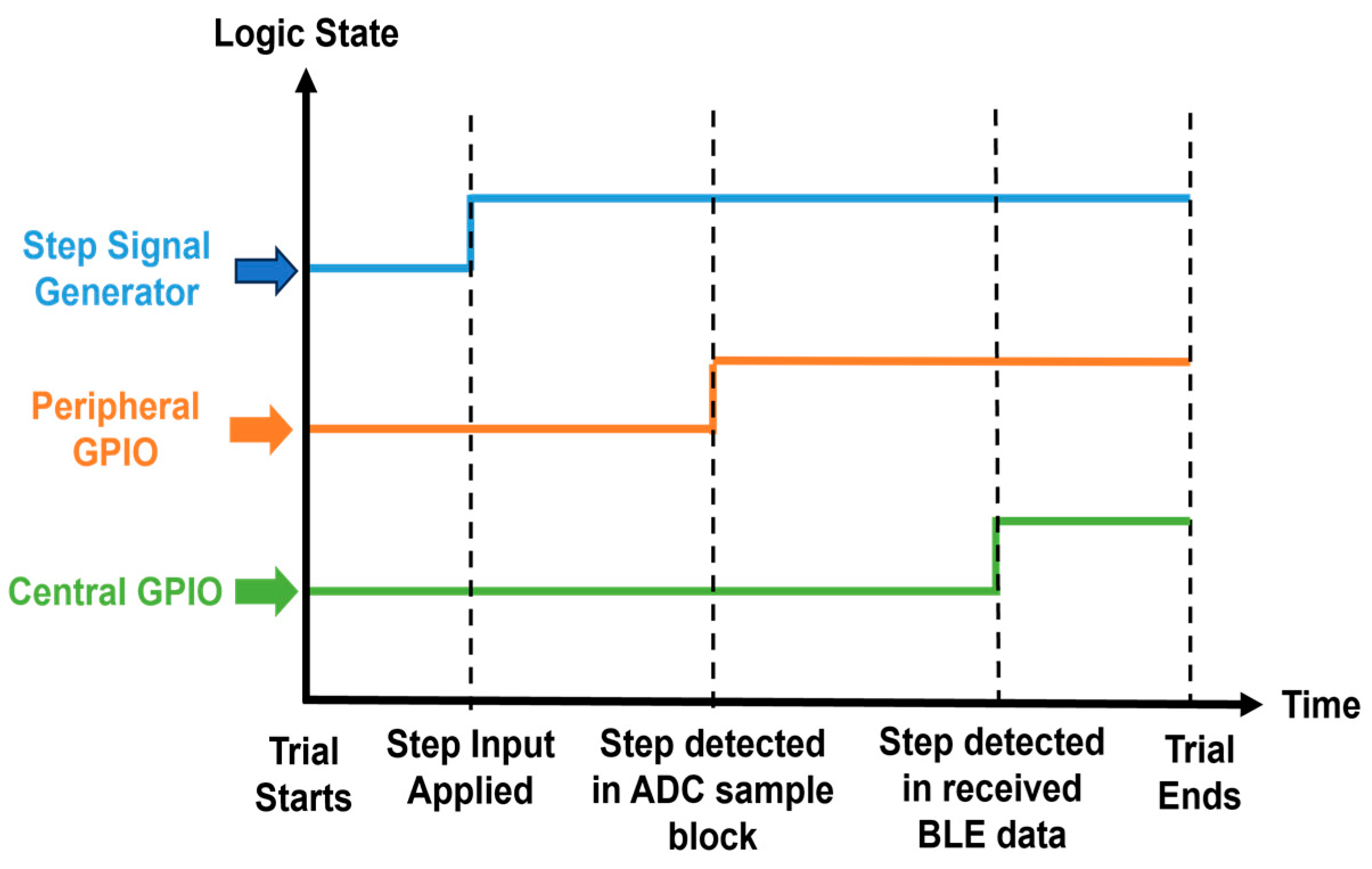
3.3. Measuring Latency
3.4. Statistical Analysis
4. Results
4.1. Number of Supported Peripheral Connections
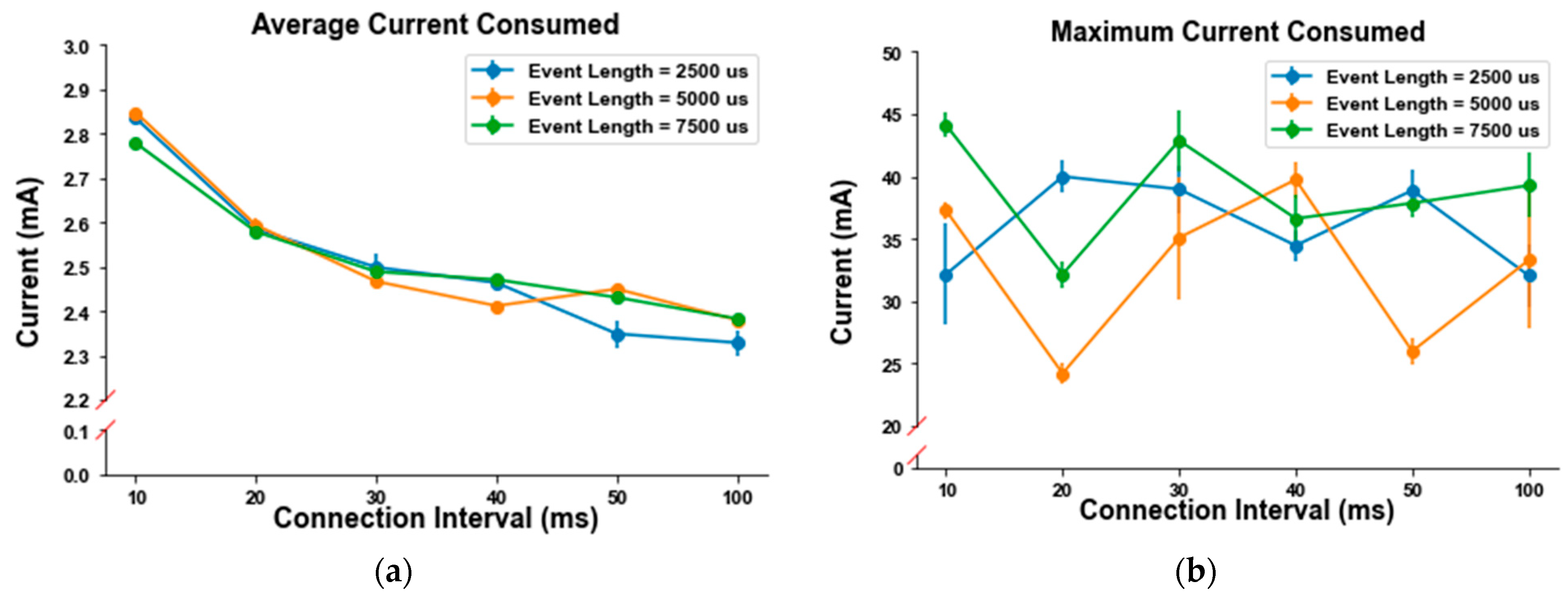
4.2. Peripheral Node Power Supply Current
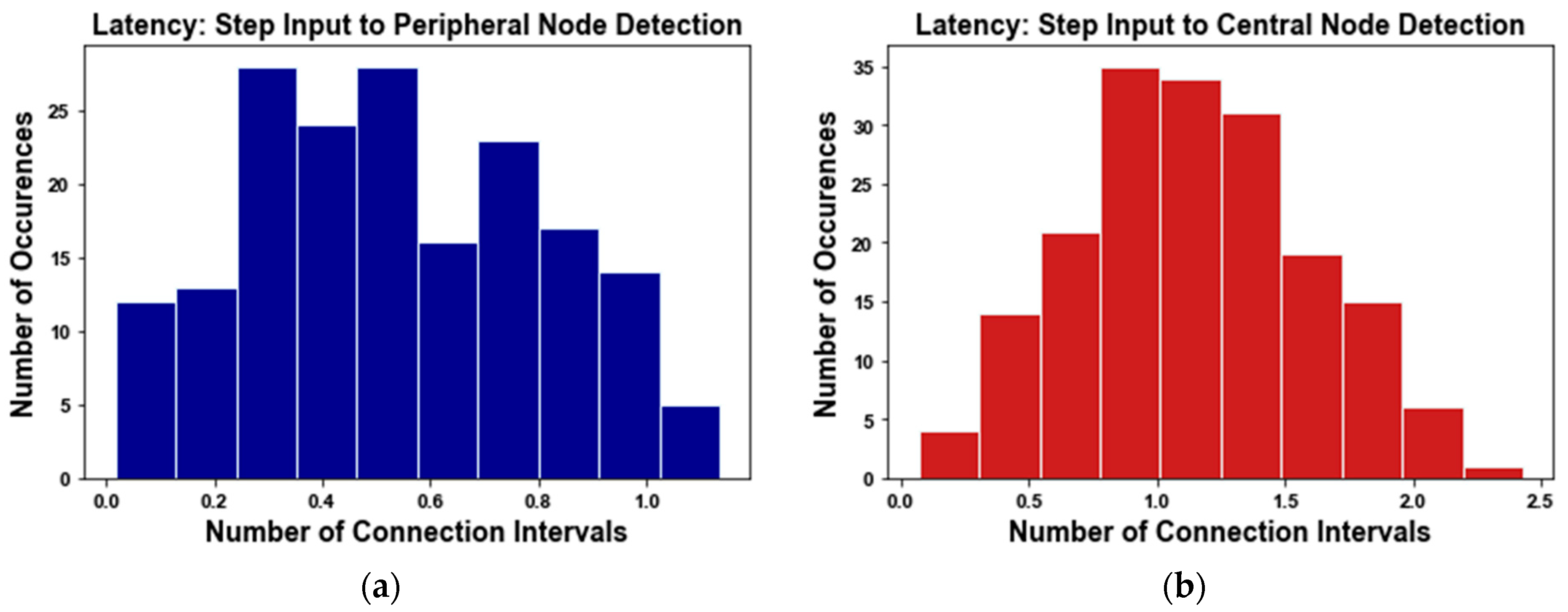
4.3. Latency
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Apple, Inc. Take an ECG with the ECG App on Apple Watch; Apple Inc.: Cupertino, CA, USA, 2023. [Google Scholar]
- Google. Google Pixel Watch. Available online: https://store.google.com/product/pixel_watch_3?hl=en-US (accessed on 14 November 2023).
- Farina, D.; Jiang, N.; Rehbaum, H.; Holobar, A.; Graimann, B.; Dietl, H.; Aszmann, O.C. The Extraction of Neural Information from the Surface EMG for the Control of Upper-Limb Prostheses: Emerging Avenues and Challenges. IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 22, 797–809. [Google Scholar] [CrossRef] [PubMed]
- Parker, P.; Englehart, K.; Hudgins, B. Myoelectric Signal Processing for Control of Powered Limb Prostheses. J. Electromyogr. Kinesiol. 2006, 16, 541–548. [Google Scholar] [CrossRef] [PubMed]
- Meta. Inside Facebook Reality Labs: Wrist-Based Interaction for the Next Computing Platform; Meta: Menlo Park, CA, USA, 2021. [Google Scholar]
- Farrell, T.R.; Weir, R.F. The Optimal Controller Delay for Myoelectric Prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 111–118. [Google Scholar] [CrossRef] [PubMed]
- St-Amant, Y.; Rancourt, D.; Clancy, E.A. Influence of Smoothing Window Length on Electromyogram Amplitude Estimates. IEEE Trans. Biomed. Eng. 1998, 45, 795–799. [Google Scholar] [CrossRef] [PubMed]
- Sponas, J.G. Things You Should Know About Bluetooth Range; Nordic Semiconductor: Trondheim, Norway, 2023. [Google Scholar]
- Nelson, B.D.; Karipott, S.S.; Wang, Y.; Ong, K.G. Wireless Technologies for Implantable Devices. Sensors 2020, 20, 4604. [Google Scholar] [CrossRef] [PubMed]
- Core Specification Working Group. Bluetooth Core Specification; Core Specification Working Group: Zug, Switzerland, 2021. [Google Scholar]
- Dehghani, A.; Ghalamfarsa, F.; Bidgoly, A.J.; Mollarasouli, F. Recent Advances and Challenges in Internet of Things (IoT)-Based Smartphone Biosensors for COVID-19 and Zika Viruses Detection: A Review. IEEE Sens. 2023, 23, 24123–24134. [Google Scholar] [CrossRef]
- Connectivity Standards Alliance. Zigbee FAQ. Available online: https://csa-iot.org/all-solutions/zigbee/zigbee-direct-faq/ (accessed on 25 October 2023).
- Merletti, R.; Cerone, G.L. Tutorial. Surface EMG Detection, Conditioning and Pre-Processing: Best Practices. J. Electromyogr. Kinesiol. 2020, 54, 102440. [Google Scholar] [CrossRef] [PubMed]
- Gallina, A.; Disselhorst-Klug, C.; Farina, D.; Merletti, R.; Besomi, M.; Holobar, A.; Enoka, R.M.; Hug, F.; Falla, D.; Sogaard, K.; et al. Consensus for Experimental Design in Electromyography (CEDE) Project: High-Density Surface Electromyography Matrix. J. Electromyogr. Kinesiol. 2022, 64, 102656. [Google Scholar] [CrossRef] [PubMed]
- Kang, S.G.; Song, M.S.; Kim, J.W.; Lee, J.W.; Kim, J. Near-Field Communication in Biomedical Applications. Sensors 2021, 21, 703. [Google Scholar] [CrossRef] [PubMed]
- Lazaro, A.; Villarino, R.; Lazaro, M.; Canellas, N.; Prieto-Simon, B.; Girbau, D. Recent Advances in Batteryless NFC Sensors for Chemical Sensing and Biosensing. Biosensors 2023, 13, 775. [Google Scholar] [CrossRef] [PubMed]
- Fries, F.; Ghoreishizadeh, S. Design Methodology of a Wireless pH Measuring Device for Orthopaedic Implants. In Proceedings of the 2020 27th IEEE International Conference on Electronics, Circuits and Systems (ICECS), Glasgow, UK, 23–25 November 2020. [Google Scholar]
- Flament, F.; Galliano, A.; Abric, A.; Matoschitz, C.-M.; Bammer, M.; Kampus, M.; Kanda-Diwidi, D.; Chibout, S.; Cassier, M.; Delaunay, C. Skin Moisture Assessment Using Hydration Sensor Patches Coupled with Smartphones via Near Field Communication (NFC). A Pilot Study with the First Generation of Patches That Allow Self-Recordings of Skin Hydration. Skin Res. Technol. 2021, 27, 959–965. [Google Scholar] [CrossRef] [PubMed]
- Mirzajani, H.; Abbasiasl, T.; Mirlou, F.; Istif, E.; Bathaei, M.J.; Dağ, Ç.; Deyneli, O.; Yazıcı, D.; Beker, L. An Ultra-Compact and Wireless Tag for Battery-Free Sweat Glucose Monitoring. Biosens. Bioelectron. 2022, 213, 114450. [Google Scholar] [CrossRef] [PubMed]
- ST Microelectronics. NFC Technology—Essentials & Insights; ST Microelectronics: Geneva, Switzerland, 2024. [Google Scholar]
- NFC Forum. The Building Blocks of Contactless; NFC Forum: Wakefield, MA, USA, 2024. [Google Scholar]
- Rajotte, K.J.; Wooding, A.; Farrell, T.; Li, J.; Huang, X.; Clancy, E.A.; McDonald, B. Power Consumption, Latency, and Maximum Number of Supported Nodes for BLE Biosensor Applications. In Proceedings of the MEC Symposium, Fredericton, NB, Canada, 12–15 August 2024. [Google Scholar]
- Apple, Inc. Accessory Design Guidelines for Apple Devices; Apple, Inc.: Cupertino, CA, USA, 2023. [Google Scholar]
- Townsend, K.; Cufi, C.; Akiba; Davidson, R. Getting Started with Bluetooth Low Energy; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2014. [Google Scholar]
- Tipparaju, V.V.; Mallires, K.R.; Wang, D.; Tsow, F.; Xian, X. Mitigation of Data Packet Loss in Bluetooth Low Energy-Based Wearable Healthcare Ecosystem. Biosensors 2021, 11, 350. [Google Scholar] [CrossRef] [PubMed]
- Touati, F.; Erdene-Ochir, O.; Mehmoud, W.; Hassan, A.; Mnaouer, A.B.; Gaabab, B.; Rasid, M.F.A.; Khriji, L. An Experimental Performance Evaluation and Compatibility Study of the Bluetooth Low Energy Based Platform for ECG Monitoring in WBANs. Int. J. Distrib. Sens. Netw. 2015, 11, 645781. [Google Scholar] [CrossRef]
- Brunelli, D.; Farella, E.; Giovanelli, D.; Milosevic, B.; Minkov, I. Design Considerations for Wireless Acquisition of Multichannel sEMG Signals in Prosthetic Hand Control. IEEE Sens. 2016, 16, 8338–8347. [Google Scholar] [CrossRef]
- Karvonen, H.; Mikhaylov, K.; Hämäläinen, M.; Iinatti, J.; Pomalaza-Raez, C. Interference of Wireless Technologies on BLE Based WBANs in Hospital Scenarios. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–6. [Google Scholar]
- Tosi, J.; Taffoni, F.; Santacatterina, M.; Sannino, R.; Formica, D. Performance Evaluation of Bluetooth Low Energy: A Systematic Review. Sensors 2017, 17, 2898. [Google Scholar] [CrossRef] [PubMed]
- Mohammad, A. Bluetooth 5 Speed: How to Achieve Maximum Throughput for Your BLE Application; NovelBits: Fishers, IN, USA, 2023. [Google Scholar]
- Nordic Semiconductor. nRF52840 System on Chip Multiprotocol Bluetooth 5.4 SoC Supporting Bluetooth Low Energy, Bluetooth Mesh, NFC, Thread and Zigbee; Nordic Semiconductor: Trondheim, Norway, 2024. [Google Scholar]
- Analog Devices, Inc. ADALM2000 Overview; Analog Devices, Inc.: Wilmington, MA, USA, 2022. [Google Scholar]
- Pereira, D.G.; Afonso, A.; Medeiros, F.M. Overview of Friedman’s Test and Post-Hoc Analysis. Commun. Stat.—Simul. Comput. 2015, 44, 2636–2653. [Google Scholar] [CrossRef]
- Papoulis, A. Functions of Two Random Variables. In Probability, Random Variables, and Stochastic Processes; McGraw-Hill Book Company: New York, NY, USA, 1965; p. 190. [Google Scholar]
- Nordic Semiconductor. What’s New in Bluetooth 5.3? Nordic Semiconductor: Trondheim, Norway, 2021. [Google Scholar]
- Kai, R. 6 Important Things to Know About LE Power Control; Bluetooth SIG, Inc.: Kirkland, WA, USA, 2020. [Google Scholar]
- Kanafek, P. What’s New in Bluetooth 5.4: An Overview; Nordic Semiconductor: Trondheim, Norway, 2023. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Connection Interval (ms) [MTU Size] | Event Length (μs) | Theoretical Max. Number of Connections | Achieved Connections at Specified Distance | ||
|---|---|---|---|---|---|
| 0.5 m | 4.5 m | 9.0 m | |||
| 10 [40 bytes] | 2500 | 4 | 4 | 3 | 2 |
| 5000 | 2 | 2 | 2 | 2 | |
| 7500 | 1 | 1 | 1 | 1 | |
| 20 [60 bytes] | 2500 | 8 | 8 | 2 | 1 |
| 5000 | 4 | 4 | 4 | 1 | |
| 7500 | 2 | 2 | 2 | 1 | |
| 30 [80 bytes] | 2500 | 12 | 11 | 6 | 3 |
| 5000 | 6 | 6 | 3 | 1 | |
| 7500 | 4 | 4 | 4 | 2 | |
| 40 [100 bytes] | 2500 | 16 | 12 | 6 | 1 |
| 5000 | 8 | 8 | 8 | 2 | |
| 7500 | 5 | 5 | 6 | 2 | |
| 50 [120 bytes] | 2500 | 20 | 12 | 5 | 2 |
| 5000 | 10 | 10 | 7 | 3 | |
| 7500 | 6 | 6 | 6 | 1 | |
| 100 [247 bytes] | 2500 | 40 | 10 | 7 | 1 |
| 5000 | 20 | 10 | 7 | 2 | |
| 7500 | 13 | 11 | 2 | 2 | |
| Connection Interval (ms) | Event Lengths Compared (μs) | p-Value (Significant) for: | |
|---|---|---|---|
| Average Current | Maximum Current | ||
| 10 | 2500 vs. 5000 | 0.174 | 0.174 |
| 2500 vs. 7500 | 0.037 (*) | 0.001 (*) | |
| 5000 vs. 7500 | 0.001 (*) | 0.037 (*) | |
| 20 | 2500 vs. 5000 | 0.109 | 0.001 (*) |
| 2500 vs. 7500 | 0.373 | 0.065 | |
| 5000 vs. 7500 | 0.002 (*) | 0.065 | |
| 30 | 2500 vs. 5000 | 0.001 (*) | 0.109 |
| 2500 vs. 7500 | 0.261 | 0.109 | |
| 5000 vs. 7500 | 0.065 | 0.001 (*) | |
| 40 | 2500 vs. 5000 | 0.003 (*) | 0.001 (*) |
| 2500 vs. 7500 | 0.900 | 0.174 | |
| 5000 vs. 7500 | 0.002 (*) | 0.174 | |
| 50 | 2500 vs. 5000 | 0.001 (*) | 0.001 (*) |
| 2500 vs. 7500 | 0.174 | 0.632 | |
| 5000 vs. 7500 | 0.037 (*) | 0.010 (*) | |
| 100 | 2500 vs. 5000 | 0.007 (*) | 0.504 |
| 2500 vs. 7500 | 0.001 (*) | 0.001 (*) | |
| 5000 vs. 7500 | 0.760 | 0.037 (*) | |
| Connection Interval 1 (ms) | Connection Interval 2 (ms) | Average Current: p-Value (Significant) for: | Maximum Current: p-Value (Significant) for: | ||||
|---|---|---|---|---|---|---|---|
| Event Length 2500 μs | Event Length 5000 μs | Event Length 7500 μs | Event Length 2500 μs | Event Length 5000 μs | Event Length 7500 μs | ||
| 10 | 20 | 0.819 | 0.819 | 0.819 | 0.002 (*) | 0.003 (*) | 0.001 (*) |
| 30 | 0.121 | 0.160 | 0.160 | 0.023 (*) | 0.888 | 0.900 | |
| 40 | 0.006 (*) | 0.001 (*) | 0.005 (*) | 0.900 | 0.472 | 0.005 (*) | |
| 50 | 0.001 (*) | 0.005 (*) | 0.001 (*) | 0.019 (*) | 0.066 | 0.007 (*) | |
| 100 | 0.001 (*) | 0.001 (*) | 0.001 (*) | 0.900 | 0.681 | 0.324 | |
| 20 | 30 | 0.750 | 0.819 | 0.819 | 0.900 | 0.090 | 0.001 (*) |
| 40 | 0.181 | 0.005 (*) | 0.160 | 0.009 (*) | 0.001 (*) | 0.396 | |
| 50 | 0.001 (*) | 0.160 | 0.005 (*) | 0.900 | 0.900 | 0.324 | |
| 100 | 0.001 (*) | 0.001 (*) | 0.001 (*) | 0.001 (*) | 0.206 | 0.007 (*) | |
| 30 | 40 | 0.900 | 0.160 | 0.819 | 0.066 | 0.047 (*) | 0.023 (*) |
| 50 | 0.078 | 0.819 | 0.160 | 0.900 | 0.543 | 0.033 (*) | |
| 100 | 0.033 (*) | 0.005 (*) | 0.005 (*) | 0.007 (*) | 0.900 | 0.612 | |
| 40 | 50 | 0.543 | 0.819 | 0.819 | 0.056 | 0.001 (*) | 0.900 |
| 100 | 0.359 | 0.819 | 0.160 | 0.900 | 0.016 (*) | 0.612 | |
| 50 | 100 | 0.900 | 0.160 | 0.819 | 0.006 (*) | 0.750 | 0.681 |
| Combination #1 (Connection Interval, Event Length) | Combination #2 (Connection Interval, Event Length) | p-Value |
|---|---|---|
| (10 ms, 2500 μs) | (50 ms, 2500 μs) | 0.022 |
| (10 ms, 2500 μs) | (100 ms, 5000 μs) | 0.001 |
| (10 ms, 2500 μs) | (40 ms, 7500 μs) | 0.009 |
| (10 ms, 2500 μs) | (100 ms, 7500 μs) | 0.001 |
| (10 ms, 5000 μs) | (100 ms, 5000 μs) | 0.016 |
| (20 ms, 5000 μs) | (100 ms, 5000 μs) | 0.034 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rajotte, K.J.; Wooding, A.; McDonald, B.E.; Farrell, T.R.; Li, J.; Huang, X.; Clancy, E.A. Evaluation of BLE Star Network for Wireless Wearable Prosthesis/Orthosis Controller. Appl. Sci. 2024, 14, 10455. https://doi.org/10.3390/app142210455
Rajotte KJ, Wooding A, McDonald BE, Farrell TR, Li J, Huang X, Clancy EA. Evaluation of BLE Star Network for Wireless Wearable Prosthesis/Orthosis Controller. Applied Sciences. 2024; 14(22):10455. https://doi.org/10.3390/app142210455
Chicago/Turabian StyleRajotte, Kiriaki J., Anson Wooding, Benjamin E. McDonald, Todd R. Farrell, Jianan Li, Xinming Huang, and Edward A. Clancy. 2024. "Evaluation of BLE Star Network for Wireless Wearable Prosthesis/Orthosis Controller" Applied Sciences 14, no. 22: 10455. https://doi.org/10.3390/app142210455
APA StyleRajotte, K. J., Wooding, A., McDonald, B. E., Farrell, T. R., Li, J., Huang, X., & Clancy, E. A. (2024). Evaluation of BLE Star Network for Wireless Wearable Prosthesis/Orthosis Controller. Applied Sciences, 14(22), 10455. https://doi.org/10.3390/app142210455