
A Method of Dual-AGV-Ganged Path Planning Based on the Genetic Algorithm



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
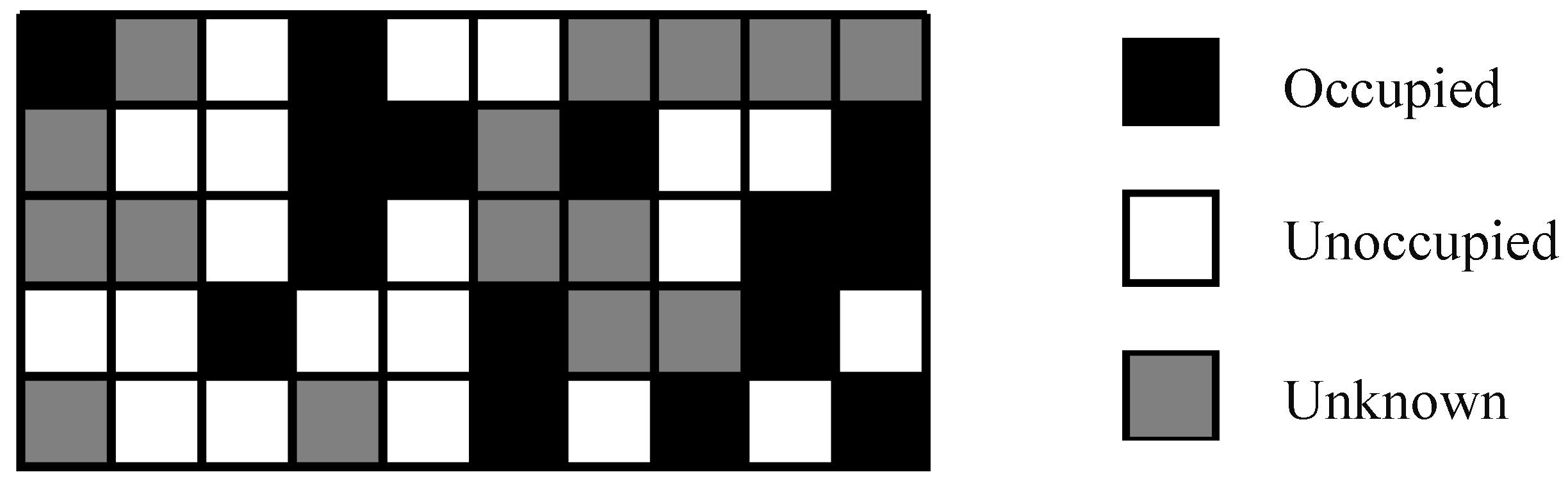
2. Establishment of Environmental Model
3. Proposed Dual-AGV-Ganged Path-Planning Method
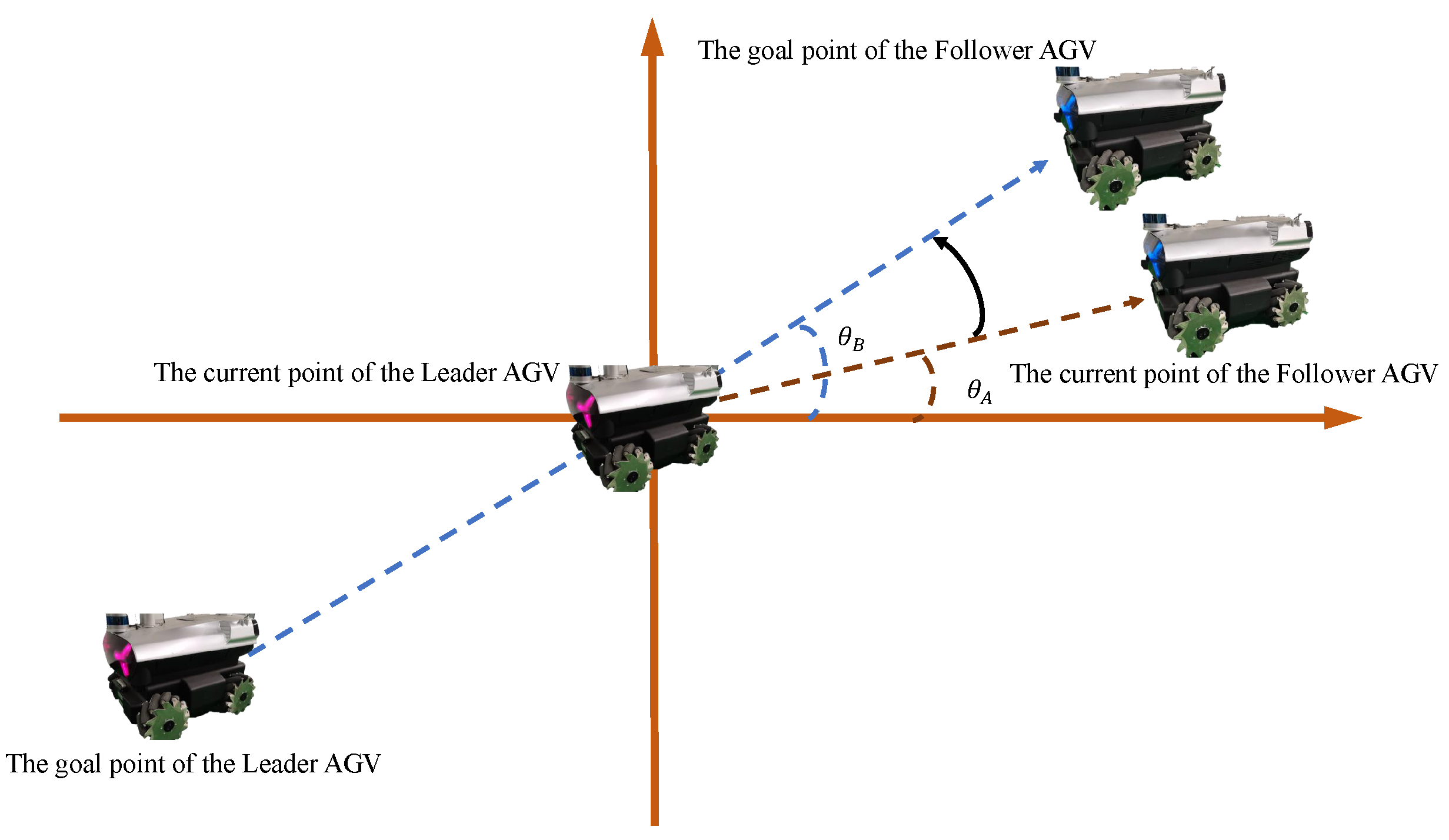
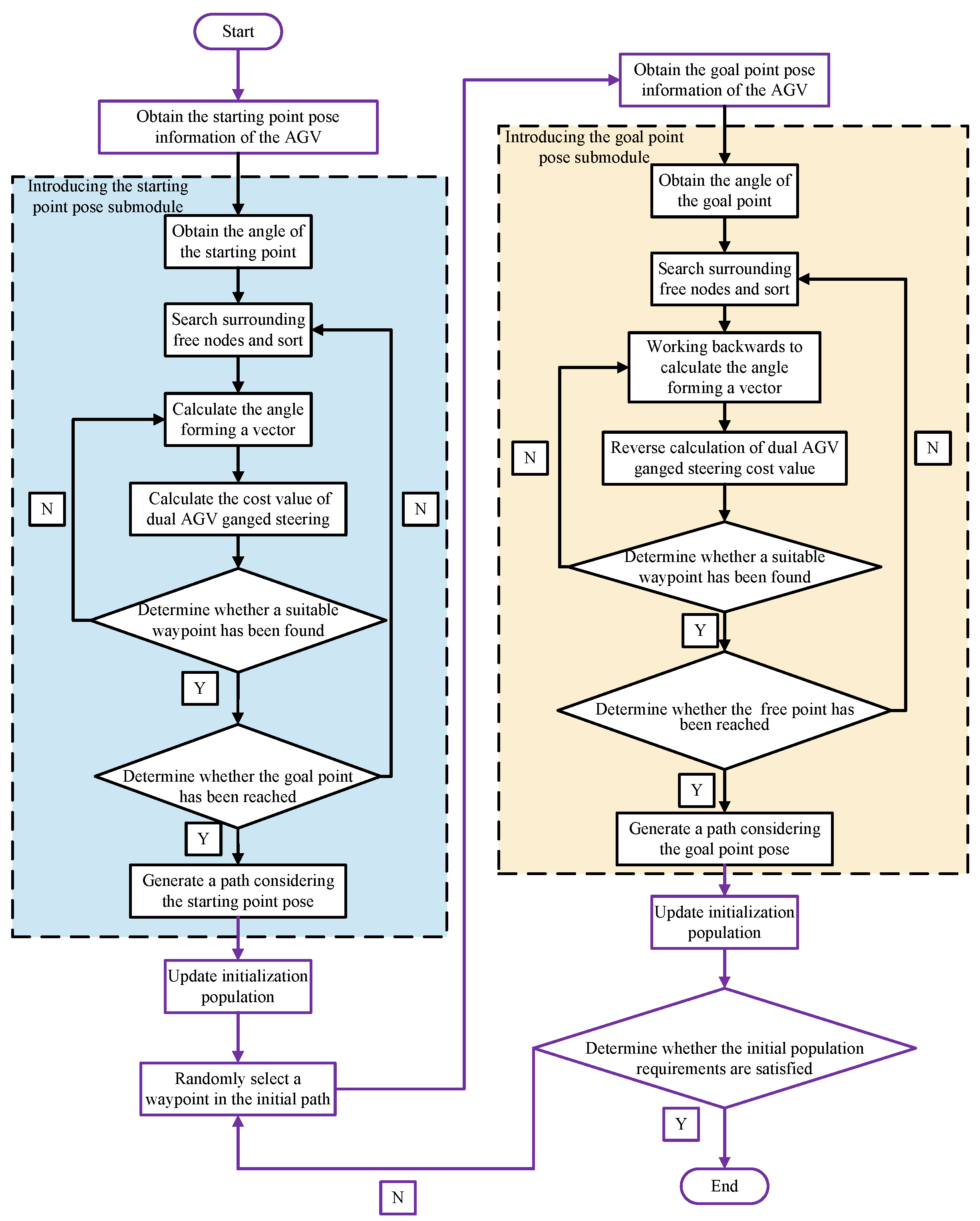
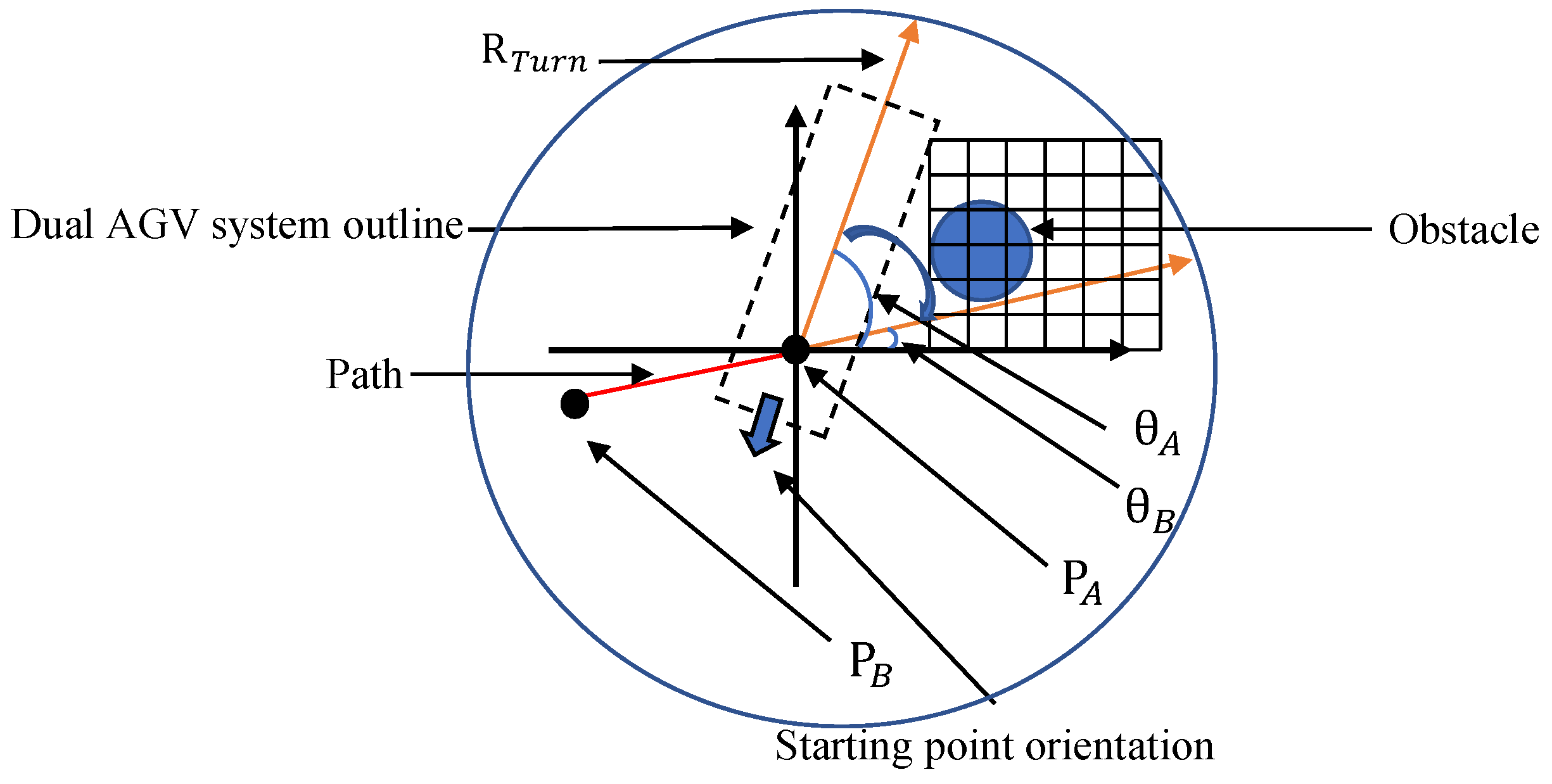
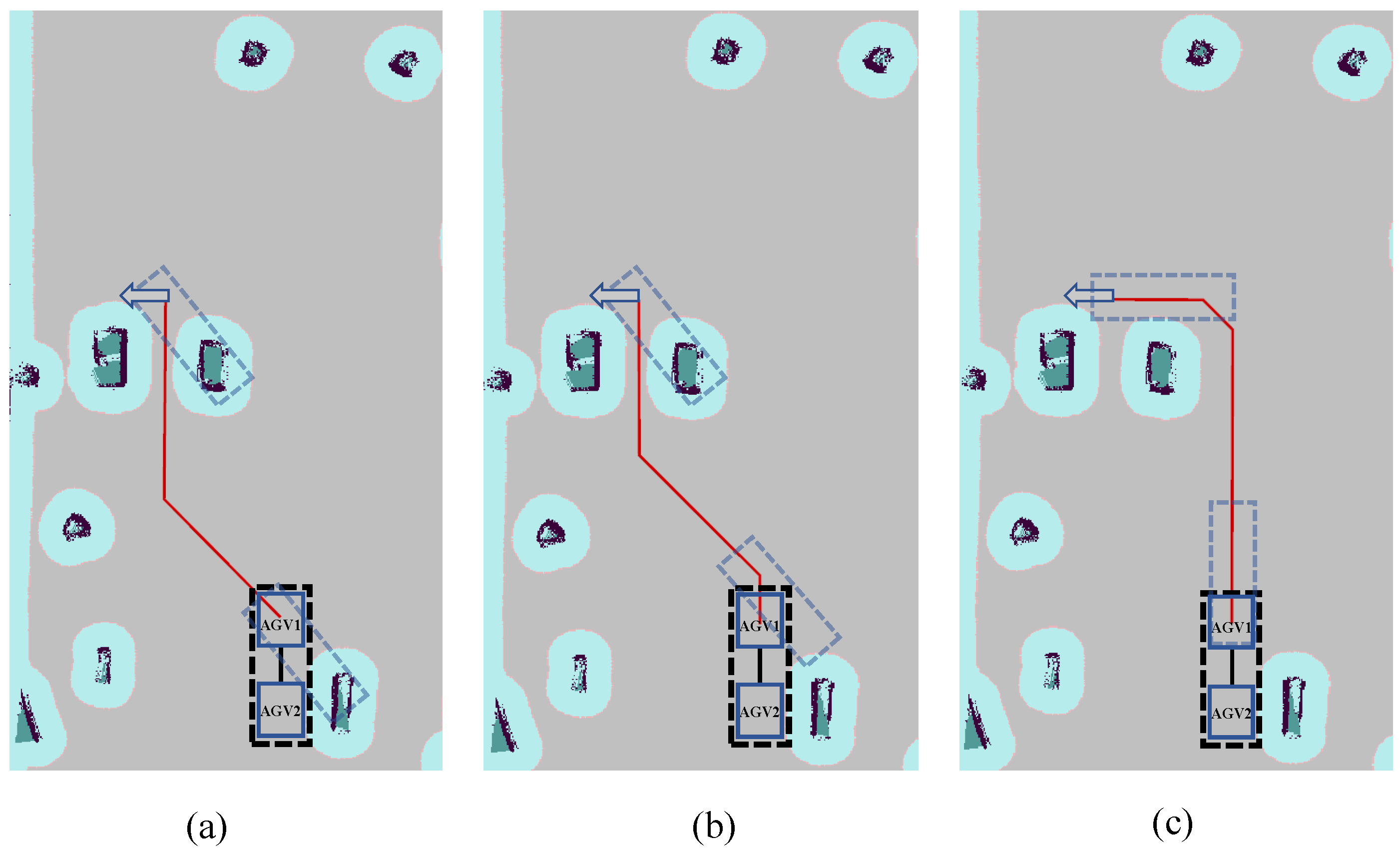
3.1. Introducing the Starting-Point and Goal-Point Pose for Path Initialization
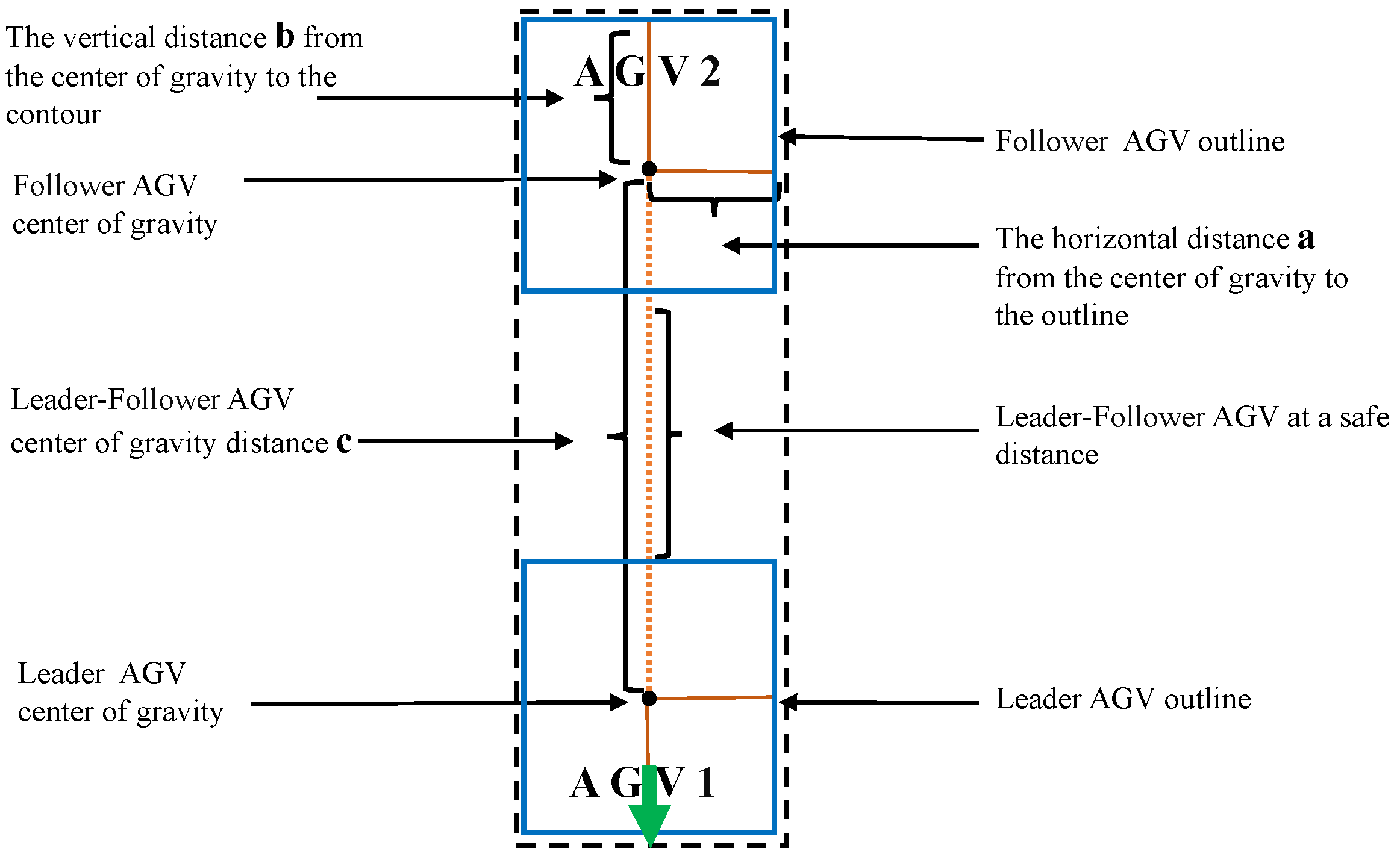
3.2. Dual-AGV-Ganged Fitness Function
3.3. Genetic Operator
3.4. Algorithm Termination Conditions
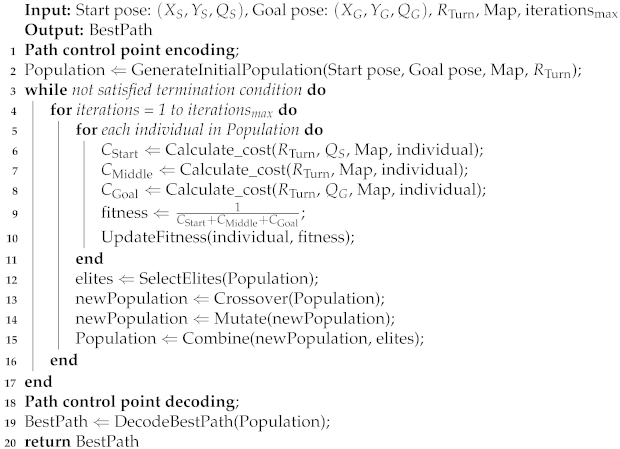
3.5. Algorithm Process
| Algorithm 1: Genetic Algorithm |
 |
4. Experimental Results and Discussion
4.1. Simulation Experiment of the Introduced Starting-Point and Goal-Point Poses
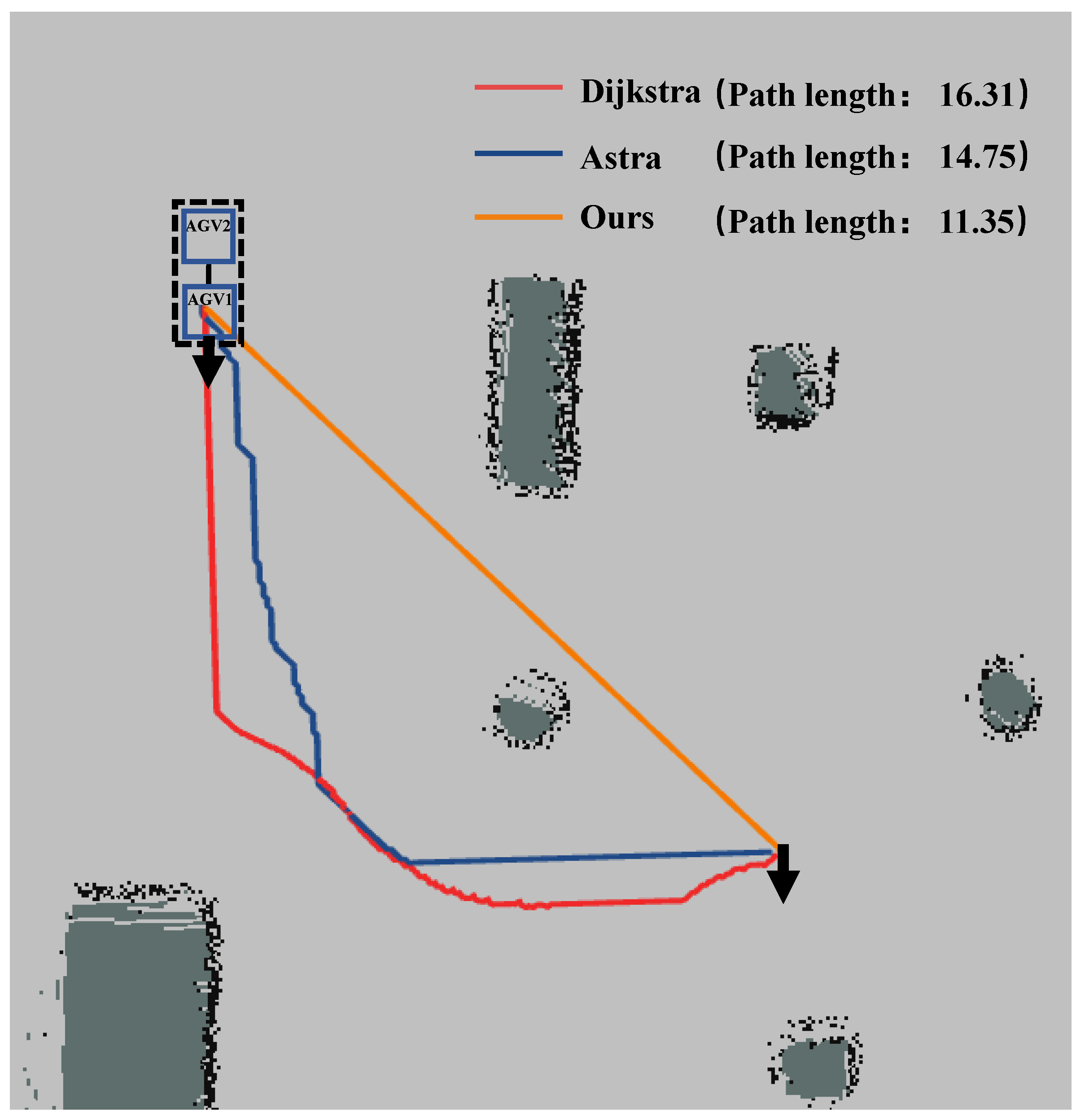
4.2. Path-Length Comparison Simulation Experiment
4.3. Real Experiment Introducing Starting-Point and Goal-Point Poses
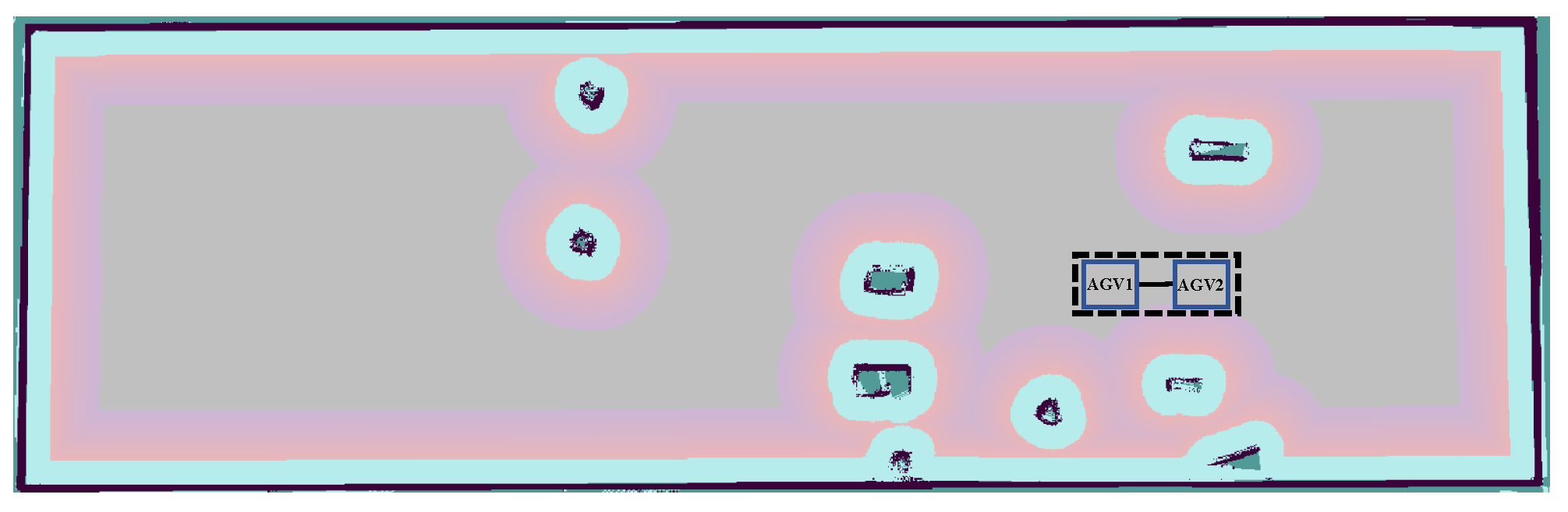
4.4. Comparison of Real-World Experiments in Narrow Environments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ji, W.; Wang, L. Industrial robotic machining: A review. Int. J. Adv. Manuf. Technol. 2019, 103, 1239–1255. [Google Scholar] [CrossRef]
- Li, D.; He, Y.; Zhao, X.; Su, Y.; Huang, J. Trajectory Tracking Control Design for Dual Unmanned Ground Vehicle Cooperative Handling System. In Proceedings of the 2022 International Conference on Advanced Robotics and Mechatronics (ICARM), Guilin, China, 9–11 July 2022; pp. 943–948. [Google Scholar]
- Liu, L.; Wang, X.; Yang, X.; Liu, H.; Li, J.; Wang, P. Path planning techniques for mobile robots: Review and prospect. Expert Syst. Appl. 2023, 227, 120254. [Google Scholar] [CrossRef]
- Akka, K.; Khaber, F. Mobile Robot Path Planning Using an Improved Ant Colony Optimization. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418774673. [Google Scholar] [CrossRef]
- Zheng, T.; Xu, Y.; Zheng, D. AGV Path Planning based on Improved A-star Algorithm. In Proceedings of the 2024 IEEE 7th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 15–17 March 2024. [Google Scholar]
- Chen, Z.; Xu, B. AGV path planning based on improved artificial potential field method. In Proceedings of the 2021 IEEE International Conference on Power Electronics, Computer Applications (ICPECA), Shenyang, China, 22–24 January 2021; pp. 32–37. [Google Scholar]
- LaValle, S. Rapidly-Exploring Random Trees: A New Tool for Path Planning; Research Report 9811; Department of Computer Science, Iowa State University: Ames, IA, USA, 1998. [Google Scholar]
- Sun, Y.; Fang, M.; Su, Y. AGV path planning based on improved Dijkstra algorithm. J. Phys. Conf. Ser. 2021, 1746, 012052. [Google Scholar] [CrossRef]
- He, C.; Mao, J. AGV optimal path planning based on improved ant colony algorithm. In Proceedings of the 2018 2nd International Conference on Electronic Information Technology and Computer Engineering (EITCE 2018), Shanghai, China, 12–14 October 2018; Volume 232, p. 03052. [Google Scholar]
- Luo, M.; Hou, X.; Yang, S.X. A multi-scale map method based on bioinspired neural network algorithm for robot path planning. IEEE Access 2019, 7, 142682–142691. [Google Scholar] [CrossRef]
- Zhang, Y.; Gong, D.-w.; Zhang, J.-h. Robot path planning in uncertain environment using multi-objective particle swarm optimization. Neurocomputing 2013, 103, 172–185. [Google Scholar] [CrossRef]
- Tan, X.; Lei, D.; Wu, D.; Li, Z. Robot path planning using an improved genetic algorithm with ordered feasible subpaths. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 4293–4297. [Google Scholar]
- Liang, D.; Liu, Z.; Bhamra, R. Collaborative multi-robot formation control and global path optimization. Appl. Sci. 2022, 12, 7046. [Google Scholar] [CrossRef]
- Pan, Z.; Wang, D.; Deng, H.; Li, K. A virtual spring method for the multi-robot path planning and formation control. Int. J. Control Autom. Syst. 2019, 17, 1272–1282. [Google Scholar] [CrossRef]
- Zhou, W.; Li, S.; Chen, Y. Research on Multi-Robot Cooperative Handling and Obstacle Avoidance Algorithm. In Proceedings of the 2022 International Conference on Cyber-Physical Social Intelligence (ICCSI), Nanjing, China, 18–21 November 2022; pp. 648–652. [Google Scholar]
- LIUa, Y. A Local Path Planning Method of Multi-AGV Systems. In Proceedings of the Mechatronics and Automation Technology: 2nd International Conference (ICMAT 2023), Wuhan, China, 28–29 October 2023; IOS Press: Amsterdam, The Netherlands, 2024; Volume 46, p. 380. [Google Scholar]
- Alonso-Mora, J.; Knepper, R.; Siegwart, R.; Rus, D. Local motion planning for collaborative multi-robot manipulation of deformable objects. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5495–5502. [Google Scholar]
- Wang, X.; Yang, H.; Chen, H.; Wang, J.; Bai, L.; Zan, W. Leader-Follower Formation Control Based on Artificial Potential Field and Sliding Mode Control. In Proceedings of the Intelligent Robotics and Applications: 10th International Conference, ICIRA 2017, Wuhan, China, 16–18 August 2017; Proceedings, Part III; Springer: Berlin/Heidelberg, Germany, 2017; pp. 203–214. [Google Scholar]
- Aram, K.; Erdemir, G.; Can, B. Formation Control of Multiple Autonomous Mobile Robots Using Turkish Natural Language Processing. Appl. Sci. 2024, 14, 3722. [Google Scholar] [CrossRef]
- Di Caro, G.A.; Yousaf, A.W.Z. Multi-robot informative path planning using a leader-follower architecture. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 10045–10051. [Google Scholar]
- Lin, S.; Liu, A.; Wang, J. A Dual-Layer Weight-Leader-Vicsek Model for Multi-AGV Path Planning in Warehouse. Biomimetics 2023, 8, 549. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.; Liu, W.; Zhang, H.; Xiong, Z. Obstacle Crossing by Multi-mobile Robots in Object Transportation with Deformable Sheet. arXiv 2021, arXiv:2111.09046v1. [Google Scholar]
- Yang, L.; Fu, L.; Li, P.; Mao, J.; Guo, N.; Du, L. LF-ACO: An effective formation path planning for multi-mobile robot. Math. Biosci. Eng. 2022, 19, 225–252. [Google Scholar] [CrossRef] [PubMed]
- Lu, W.; Xiong, H.; Zhang, Z.; Hu, Z.; Wang, T. Scalable Optimal Formation Path Planning for Multiple Interconnected Robots via Convex Polygon Trees. J. Intell. Robot. Syst. 2023, 109, 63. [Google Scholar] [CrossRef]
- Tse, S.K.; Wong, Y.B.; Tang, J.; Duan, P.; Leung, S.W.W.; Shi, L. Relative state formation-based warehouse multi-robot collaborative parcel moving. In Proceedings of the 2021 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS), Victoria, BC, Canada, 10–12 May 2021; pp. 375–380. [Google Scholar]
- Cui, Y.; Hu, W.; Rahmani, A. Multi-robot path planning using learning-based artificial bee colony algorithm. Eng. Appl. Artif. Intell. 2024, 129, 107579. [Google Scholar] [CrossRef]
- Huang, F.; Guo, W.; Zhao, H. AGV Path Planning Based on Improved Genetic Algorithm. In Proceedings of the 2023 2nd International Symposium on Control Engineering and Robotics (ISCER), Hangzhou, China, 17–19 February 2023; pp. 3323–3327. [Google Scholar]
- Li, Z.; Li, Y.; Rong, X.; Zhang, H. Grid map construction and terrain prediction for quadruped robot based on c-terrain path. IEEE Access 2020, 8, 56572–56580. [Google Scholar] [CrossRef]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA workshop on open source software, Kobe, Japan, 12–17 May 2009; Volume 3, p. 5. [Google Scholar]
- King, J.; Likhachev, M. Efficient Cost Computation in Cost Map Planning for Non-Circular Robots. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 3924–3930. [Google Scholar] [CrossRef]
- Oajsalee, S.; Tantrairatn, S.; Khaengkarn, S. Study of ROS Based Localization and Mapping for Closed Area Survey. In Proceedings of the 2019 IEEE 5th International Conference on Mechatronics Systems and Robots (ICMSR), Singapore, 24–28 July 2019; pp. 24–28. [Google Scholar] [CrossRef]
- Kong, M.; Ji, C.; Chen, Z.; Li, R. Application of Orientation Interpolation of Robot Using Unit Quaternion. In Proceedings of the 2013 IEEE International Conference on Information and Automation (ICIA), Yinchuan, China, 26–28 August 2013; IEEE: New York, NY, USA, 2013; pp. 384–389. [Google Scholar] [CrossRef]
- Liu, C.; Liu, A.; Wang, R.; Zhao, H.; Lu, Z. Path Planning Algorithm for Multi-Locomotion Robot Based on Multi-Objective Genetic Algorithm with Elitist Strategy. Micromachines 2022, 13, 616. [Google Scholar] [CrossRef]
- Xia, G.M.; Zeng, J.C. A stochastic particle swarm optimization algorithm based on the genetic algorithm of roulette wheel selection. Comput. Eng. Sci. 2007, 29, 6–11. [Google Scholar]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, Y.; Liu, H.; Li, M.; Ren, F. A Method of Dual-AGV-Ganged Path Planning Based on the Genetic Algorithm. Appl. Sci. 2024, 14, 7482. https://doi.org/10.3390/app14177482
Cai Y, Liu H, Li M, Ren F. A Method of Dual-AGV-Ganged Path Planning Based on the Genetic Algorithm. Applied Sciences. 2024; 14(17):7482. https://doi.org/10.3390/app14177482
Chicago/Turabian StyleCai, Yongrong, Haibin Liu, Mingfei Li, and Fujie Ren. 2024. "A Method of Dual-AGV-Ganged Path Planning Based on the Genetic Algorithm" Applied Sciences 14, no. 17: 7482. https://doi.org/10.3390/app14177482
APA StyleCai, Y., Liu, H., Li, M., & Ren, F. (2024). A Method of Dual-AGV-Ganged Path Planning Based on the Genetic Algorithm. Applied Sciences, 14(17), 7482. https://doi.org/10.3390/app14177482