




Robust Bluetooth AoA Estimation for Indoor Localization Using Particle Filter Fusion


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Array Model
3. Methods
3.1. MVDR
- (1)
- Conduct L snapshot observations of the signal source at time t and use the formula to construct a covariance matrix from the 2M − 1 signal data received by the array.
- (2)
- Calculate the inverse matrix or pseudo-inverse matrix of the covariance matrix to represent the relationship between signals.
- (3)
- Calculate the weight vector, which is the inverse matrix (or pseudo-inverse matrix) of the covariance matrix and the received signal.
- (4)
- Sort according to the size of the eigenroots, take the eigenvectors corresponding to the first K larger eigenvalues to form the signal subspace, and the remaining eigenvectors are the noise subspace.
- (5)
- Change , and calculate the spectral function according to the formula to find the position of the maximum value, and then determine the source’s azimuth angle and elevation angle.
3.2. Particle Filter
3.3. MVDR+PF Nonlinear Dynamical System Modeling
- Establishment of state equations
- Establishment of observation model
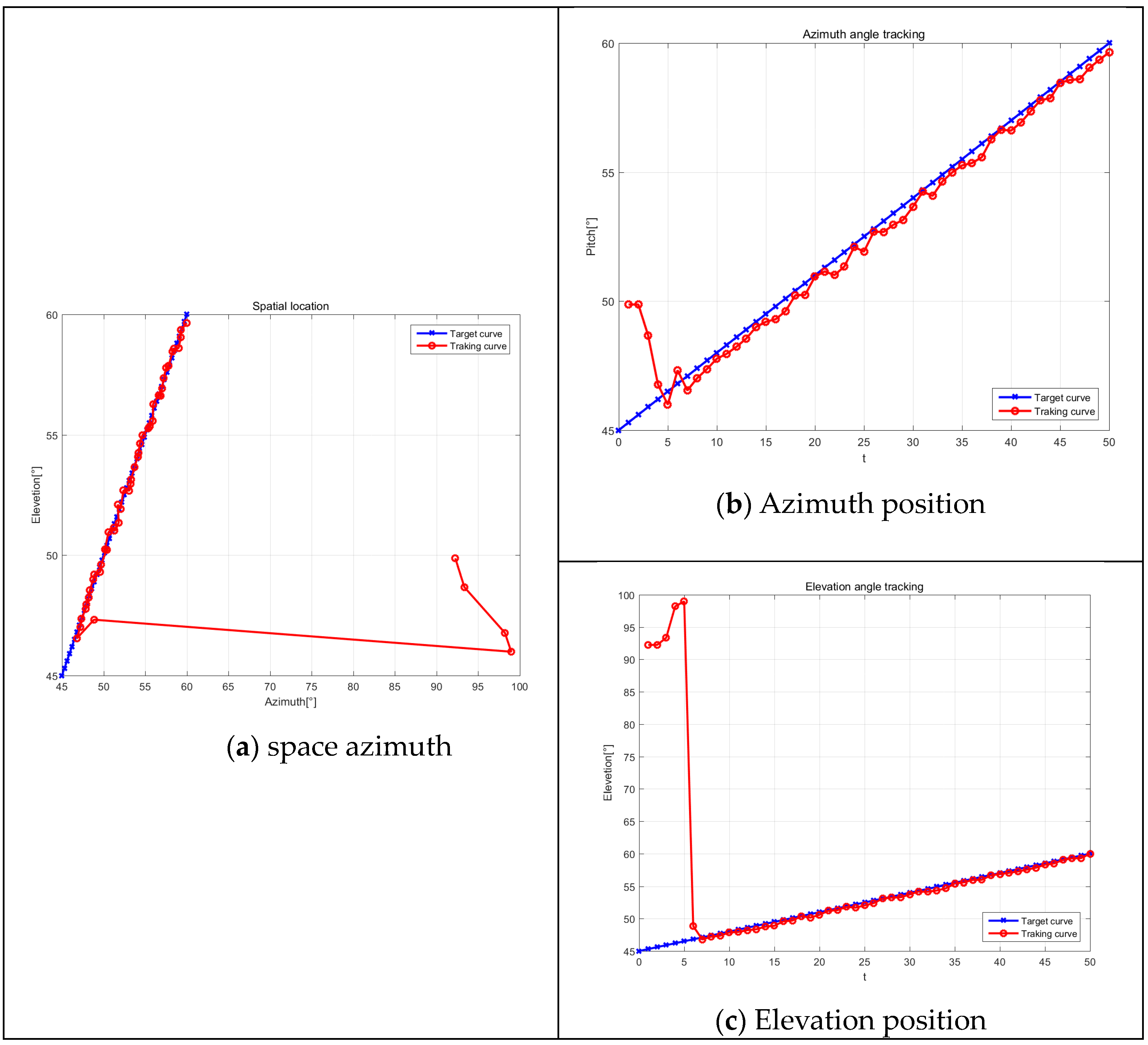
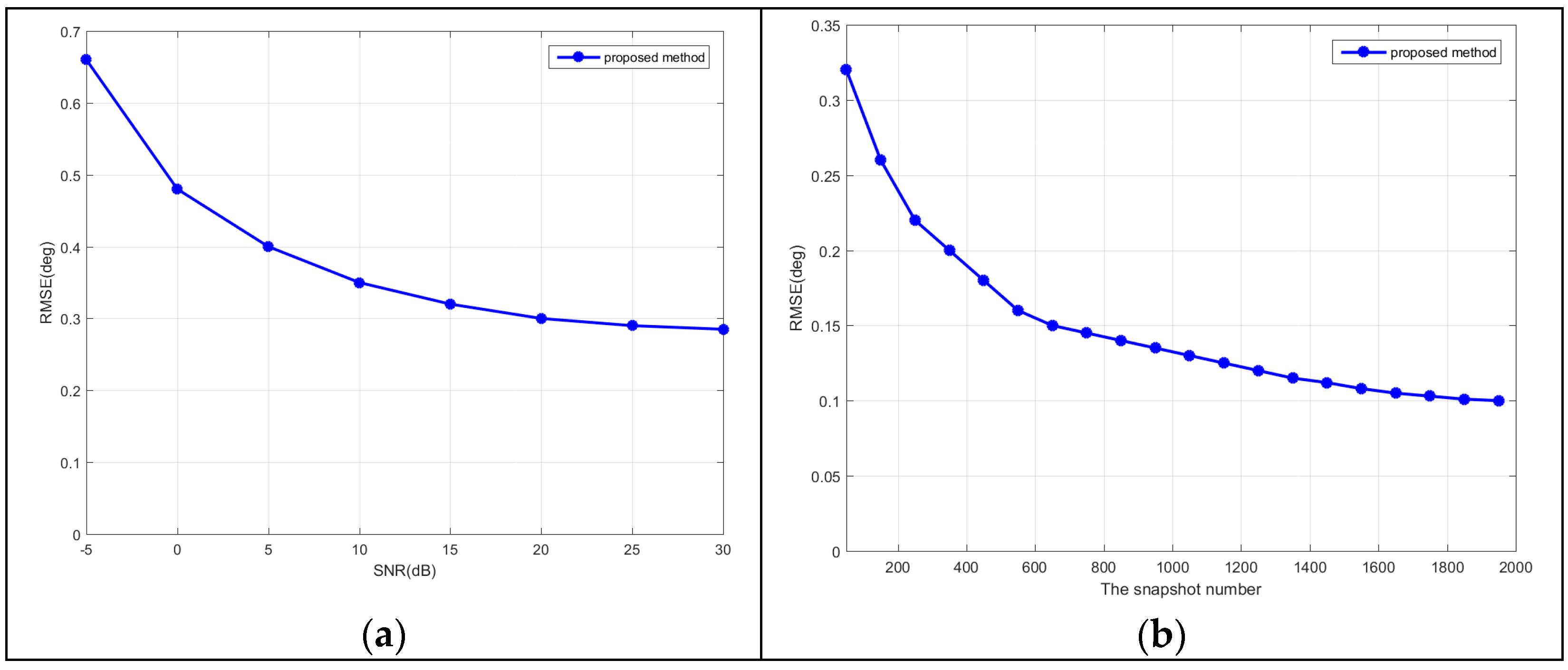
4. Simulation Experiments and Analyses
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mautz, R. Indoor Positioning Technologies. 2012. Available online: https://store.west-hn.com/wp-content/uploads/2022/05/Mautz-R.-Indoor-Positioning-Technologies.pdf (accessed on 10 July 2024).
- Alghisi, M. Integration of GNSS and 5G for Precise Urban Positioning. 2020. Available online: https://www.politesi.polimi.it/retrieve/04c68f47-3796-48ca-8dd3-15effc663cbb/2021_12_Alghisi.pdf (accessed on 21 December 2021).
- Laoudias, C.; Moreira, A.; Kim, S.; Lee, S.; Wirola, L.; Fischione, C. A survey of enabling technologies for network localization, tracking, and navigation. IEEE Commun. Surv. Tutor. 2018, 20, 3607–3644. [Google Scholar] [CrossRef]
- Chen, X.; Xie, Y.; Zhou, Z.; He, Y.; Wang, Q.; Chen, Z. An Indoor 3D Positioning Method Using Terrain Feature Matching for PDR Error Calibration. Electronics 2024, 13, 1468. [Google Scholar] [CrossRef]
- Nam, L.S. Pedestrian Navigation System in Mountainous non-GPS Environments. J. Inf. Commun. Converg. Eng. 2021, 19, 188–197. [Google Scholar] [CrossRef]
- Oguntala, G.; Abd-Alhameed, R.; Jones, S.; Noras, J.; Patwary, M.; Rodriguez, J. Indoor location identification technologies for real-time IoT-based applications: An inclusive survey. Comput. Sci. Rev. 2018, 30, 55–79. [Google Scholar] [CrossRef]
- Farahsari, P.S.; Farahzadi, A.; Rezazadeh, J.; Bagheri, A. A survey on indoor positioning systems for IoT-based applications. IEEE Internet Things J. 2022, 9, 7680–7699. [Google Scholar] [CrossRef]
- Zhuang, Y.; Zhang, C.; Huai, J.; Li, Y.; Chen, L.; Chen, R. Bluetooth localization technology: Principles, applications, and future trends. IEEE Internet Things J. 2022, 9, 23506–23524. [Google Scholar] [CrossRef]
- Natgunanathan, I.; Fernando, N.; Loke, S.W.; Weerasuriya, C. Bluetooth low energy mesh: Applications, considerations and current state-of-the-art. Sensors 2023, 23, 1826. [Google Scholar] [CrossRef]
- Radnosrati, K. Time of Flight Estimation for Radio Network Positioning; Linköping University Electronic Press: Linköping, Sweden, 2020; Volume 2054. [Google Scholar]
- Ramtohul, A.; Khedo, K.K. Mobile positioning techniques and systems: A comprehensive review. Mob. Inf. Syst. 2020, 2020, 1–18. [Google Scholar] [CrossRef]
- Pau, G.; Arena, F.; Gebremariam, Y.E.; You, I. Bluetooth 5.1: An analysis of direction finding capability for high-precision location services. Sensors 2021, 21, 3589. [Google Scholar] [CrossRef]
- Al-Tabatabaie, K.F. A new improved-music algorithm for high resolution direction of arrival detection. J. Theor. Appl. Inf. Technol. 2015, 72, 101–105. [Google Scholar]
- Gupta, P.; Kar, S.P. MUSIC and improved MUSIC algorithm to estimate direction of arrival. In Proceedings of the 2015 International Conference on Communications and Signal Processing (ICCSP), Melmaruvathur, India, 2–4 April 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 0757–0761. [Google Scholar]
- Astely, D.; Ottersten, B. The effects of local scattering on direction of arrival estimation with MUSIC. IEEE Trans. Signal Process. 1999, 47, 3220–3234. [Google Scholar] [CrossRef]
- Abeida, H.; Delmas, J.P. MUSIC-like estimation of direction of arrival for noncircular sources. IEEE Trans. Signal Process. 2006, 54, 2678–2690. [Google Scholar] [CrossRef]
- Hwang, H.K.; Aliyazicioglu, Z.; Grice, M.; Yakovlev, A. Direction of arrival estimation using a root-MUSIC algorithm. In Proceedings of the International Multi Conference of Engineers and Computer Scientists, Hong Kong, China, 19–21 March 2008; Volume 2, pp. 19–21. [Google Scholar]
- Zhang, Y.; Psounis, K. Efficient indoor localization via switched-beam antennas. IEEE Trans. Mob. Comput. 2019, 19, 2101–2115. [Google Scholar] [CrossRef]
- Sun, F.Y.; Tian, Y.B.; Hu, G.B.; Shen, Q.Y. DOA estimation based on support vector machine ensemble. Int. J. Numer. Model. Electron. Netw. Devices Fields 2019, 32, e2614. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, L.; Bi, G.; Wan, C.; Zhang, L.; Zhang, H. Novel wideband DOA estimation based on sparse Bayesian learning with Dirichlet process priors. IEEE Trans. Signal Process. 2015, 64, 275–289. [Google Scholar] [CrossRef]
- Shamshirband, S.; Petković, D.; Javidnia, H.; Gani, A. Sensor data fusion by support vector regression methodology—A comparative study. IEEE Sens. J. 2014, 15, 850–854. [Google Scholar] [CrossRef]
- Chen, M.; Gong, Y.; Mao, X. Deep neural network for estimation of direction of arrival with antenna array. IEEE Access 2020, 8, 140688–140698. [Google Scholar] [CrossRef]
- Barthelme, A.; Utschick, W. A machine learning approach to DoA estimation and model order selection for antenna arrays with subarray sampling. IEEE Trans. Signal Process. 2021, 69, 3075–3087. [Google Scholar] [CrossRef]
- Li, P.; Kadirkamanathan, V. Particle filtering based likelihood ratio approach to fault diagnosis in nonlinear stochastic systems. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2001, 31, 337–343. [Google Scholar]
- Harmanci, K.; Tabrikian, J.; Krolik, J.L. Relationships between adaptive minimum variance beamforming and optimal source localization. IEEE Trans. Signal Process. 2000, 48, 1–12. [Google Scholar] [CrossRef]
- Shi, J.; Wang, J.; Hsu, A.Y.; O’Neill, P.E.; Engman, E.T. Estimation of bare surface soil moisture and surface roughness parameter using L-band SAR image data. IEEE Trans. Geosci. Remote Sens. 1997, 35, 1254–1266. [Google Scholar]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, K.; Chen, R.; Guo, G.; Wu, Y.; Li, W. Robust Bluetooth AoA Estimation for Indoor Localization Using Particle Filter Fusion. Appl. Sci. 2024, 14, 6208. https://doi.org/10.3390/app14146208
Qiu K, Chen R, Guo G, Wu Y, Li W. Robust Bluetooth AoA Estimation for Indoor Localization Using Particle Filter Fusion. Applied Sciences. 2024; 14(14):6208. https://doi.org/10.3390/app14146208
Chicago/Turabian StyleQiu, Kaiyue, Ruizhi Chen, Guangyi Guo, Yuan Wu, and Wei Li. 2024. "Robust Bluetooth AoA Estimation for Indoor Localization Using Particle Filter Fusion" Applied Sciences 14, no. 14: 6208. https://doi.org/10.3390/app14146208
APA StyleQiu, K., Chen, R., Guo, G., Wu, Y., & Li, W. (2024). Robust Bluetooth AoA Estimation for Indoor Localization Using Particle Filter Fusion. Applied Sciences, 14(14), 6208. https://doi.org/10.3390/app14146208