
A Multi-Depth Deflectometer/Global Navigation Satellite System Method for Measuring Concrete Slab Track Deformation


Abstract
:1. Introduction
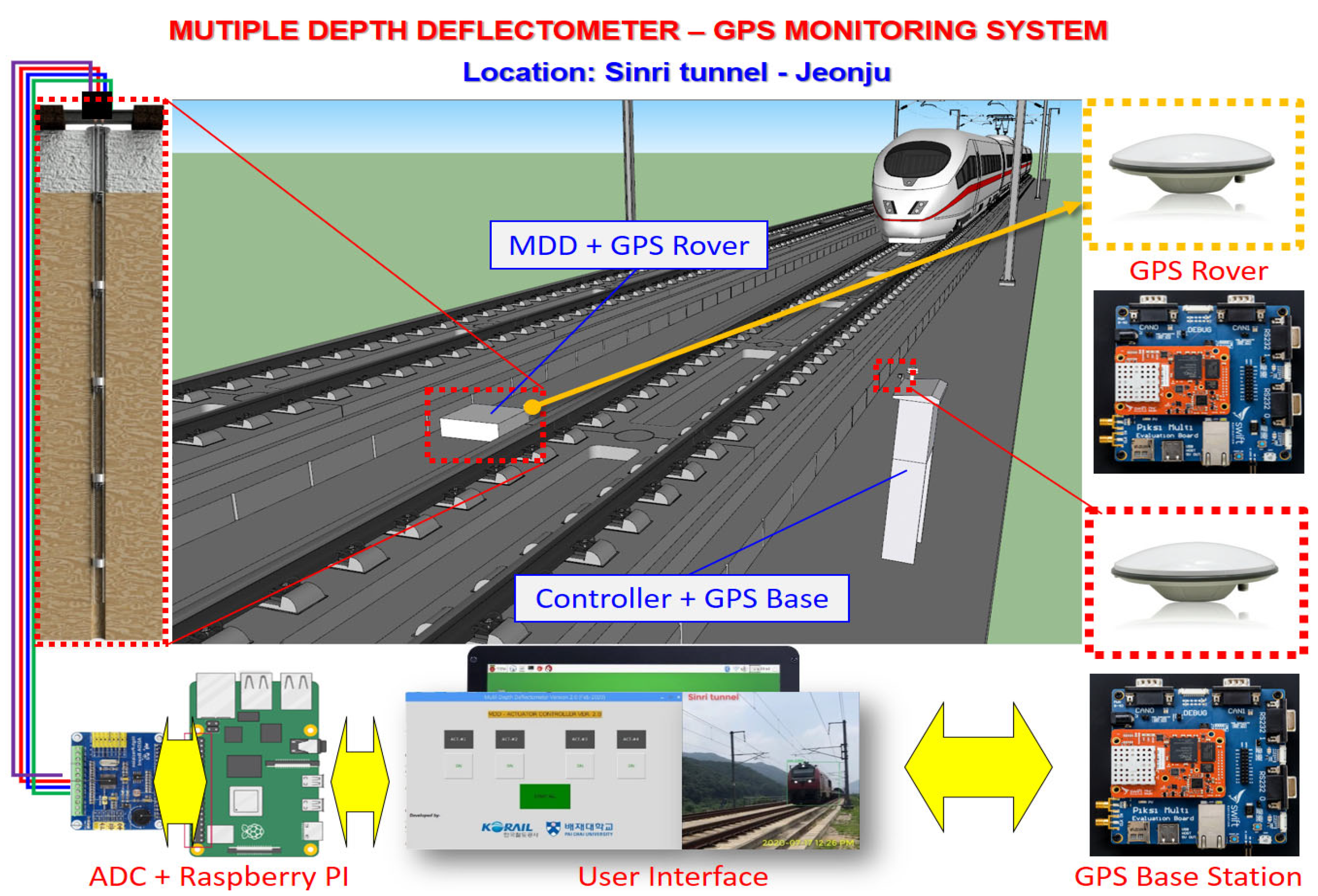
2. MDD/GNSS Installations and Measurement Methods
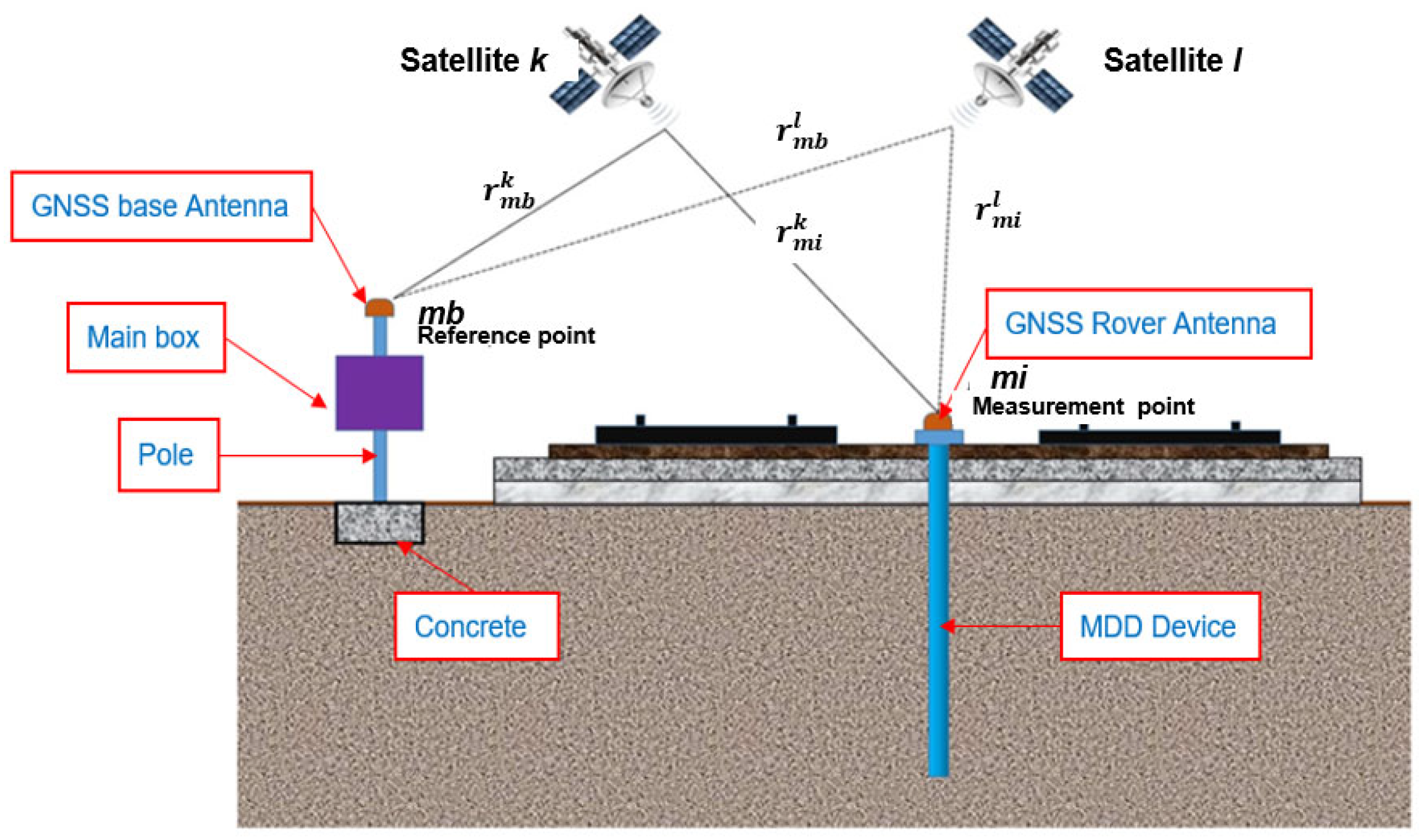
2.1. GNSS Configuration and Principle
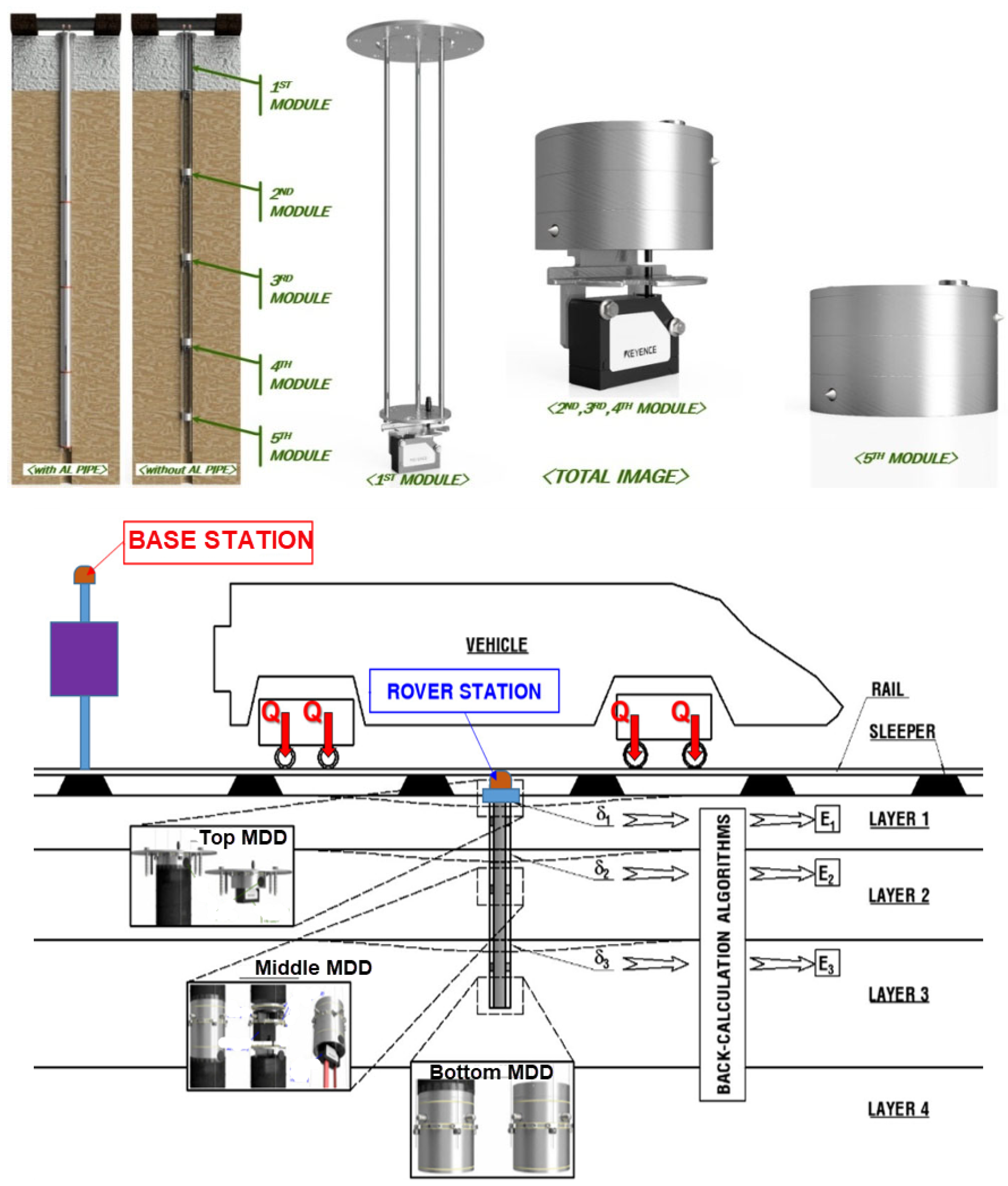
2.2. Multiple Depth Deflectometer Measuring System
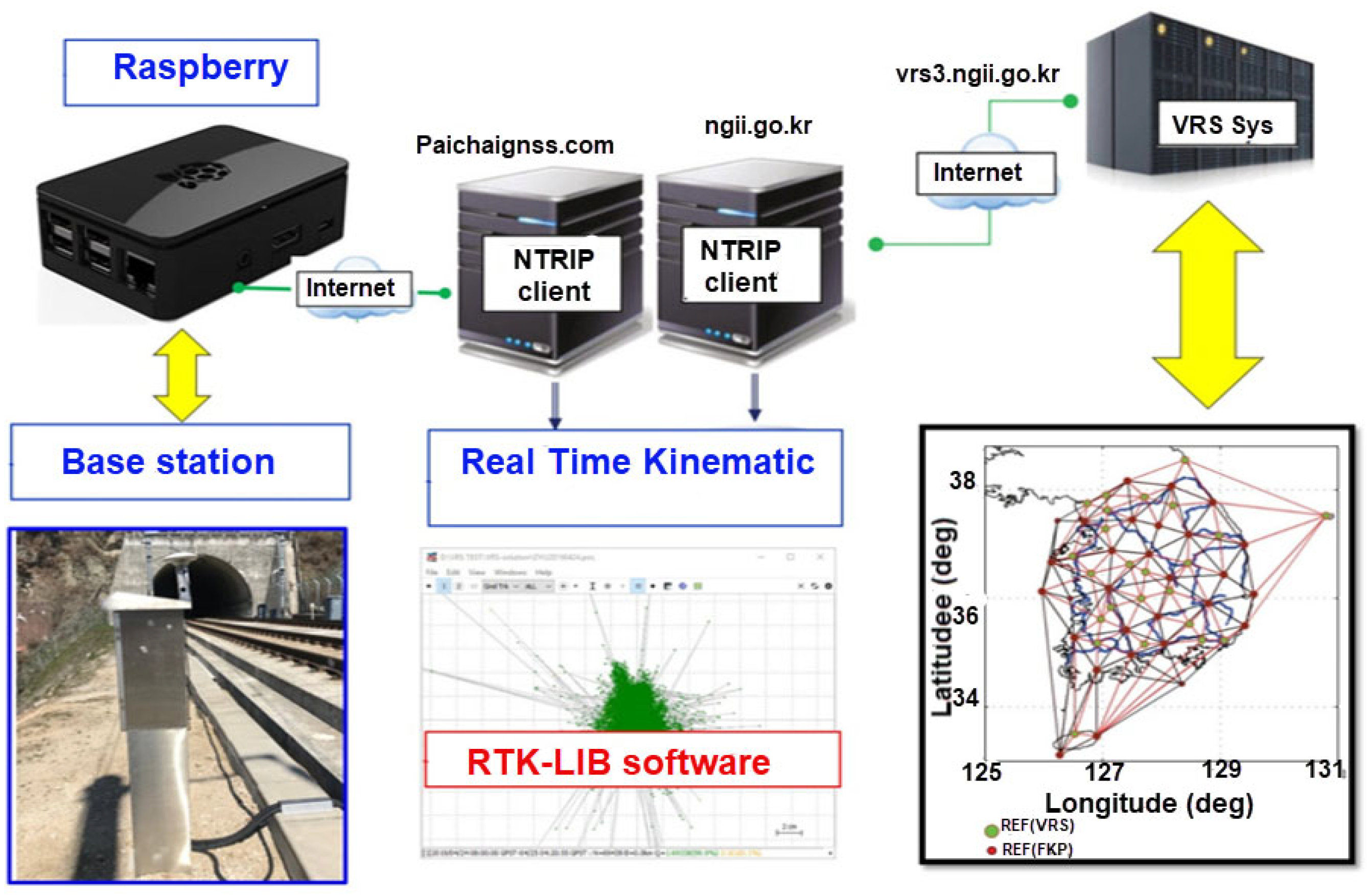
2.3. The Global Navigation Satellite System (GNSS) Measuring System
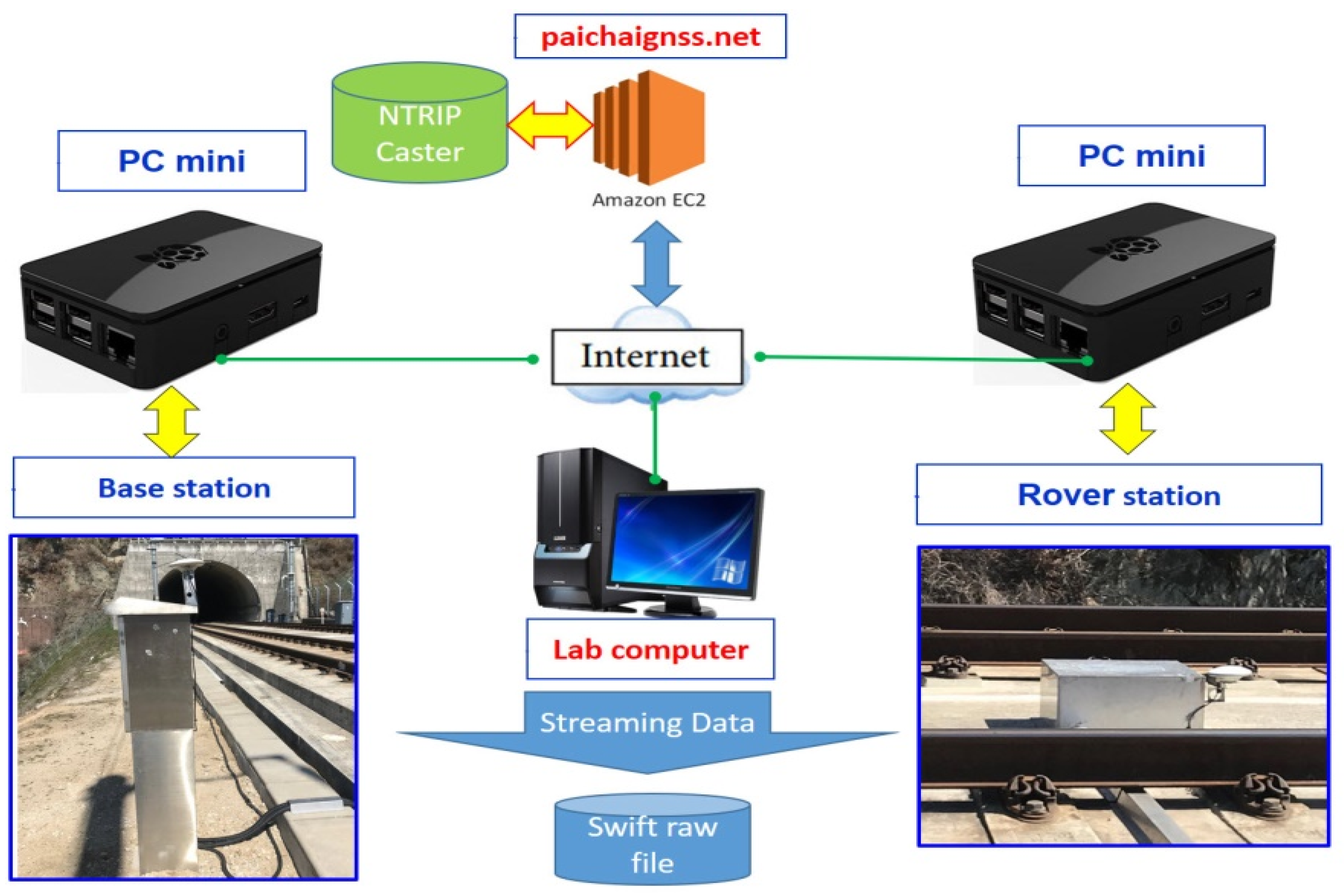
2.4. The MDD/GNSS Data Transferring System
2.5. Determination of Reference Point Coordinates
3. Settlement Calculation with Error Corrections and Resampling
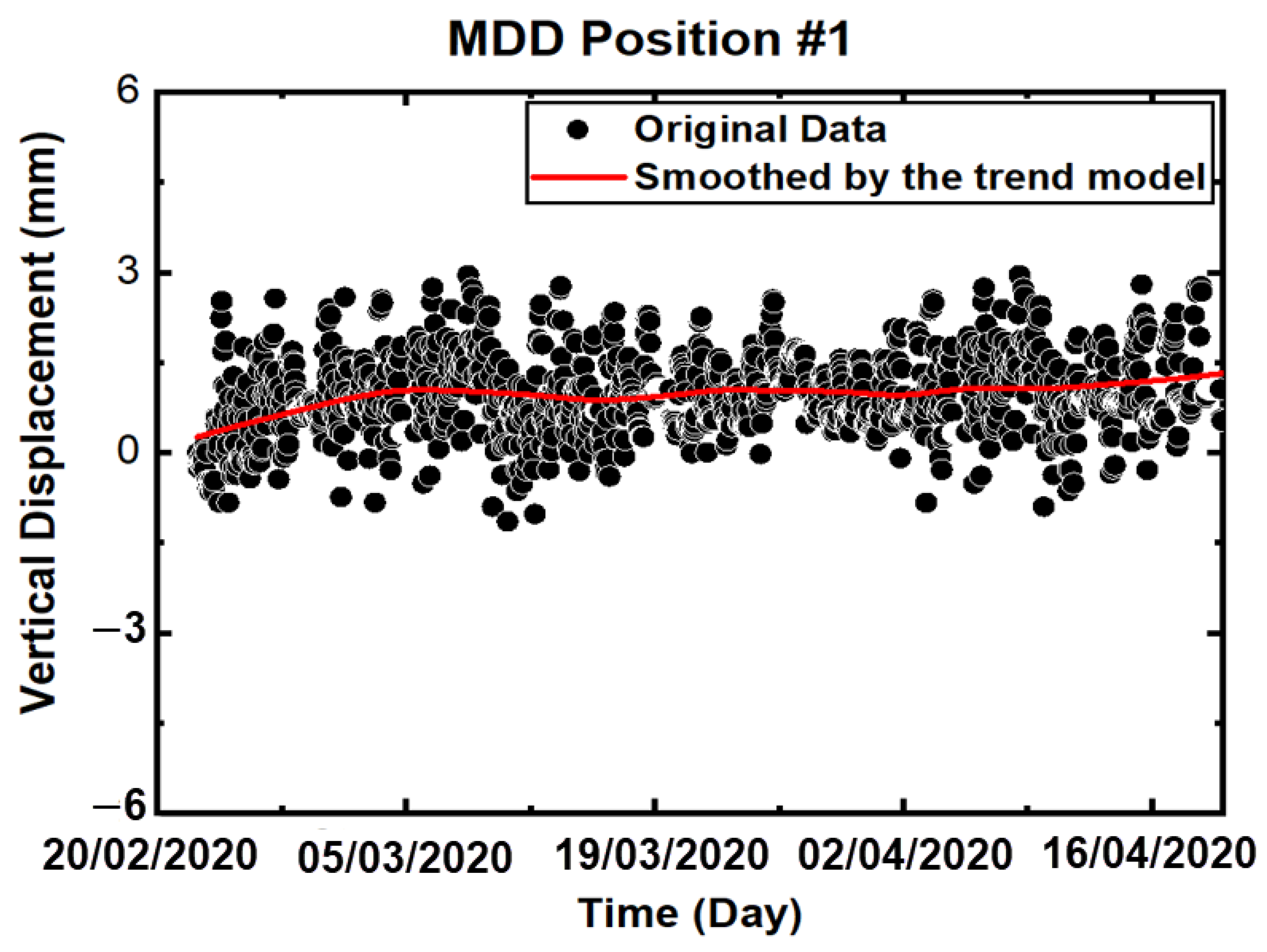
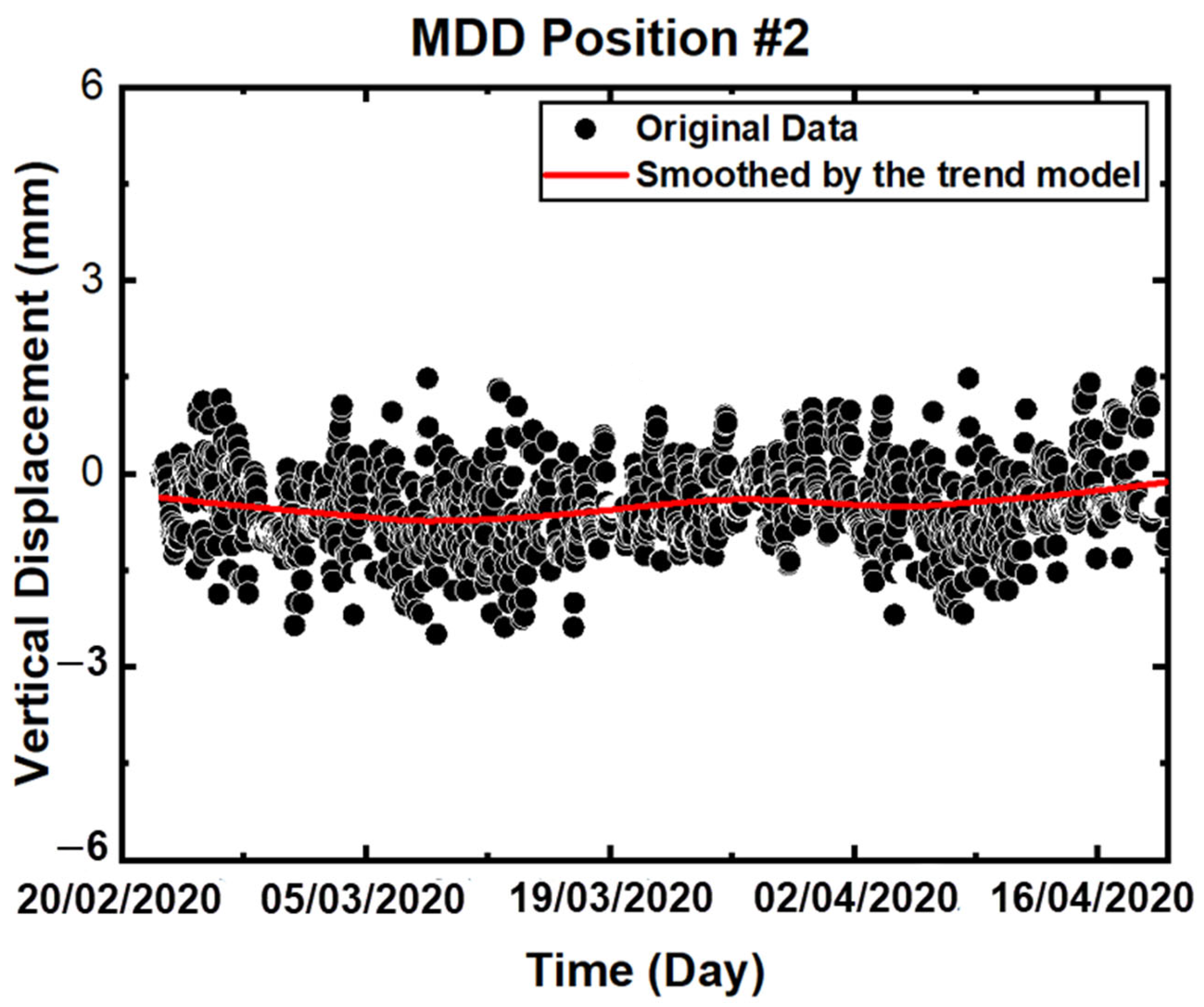
3.1. MDD Settlement Calculation over Time
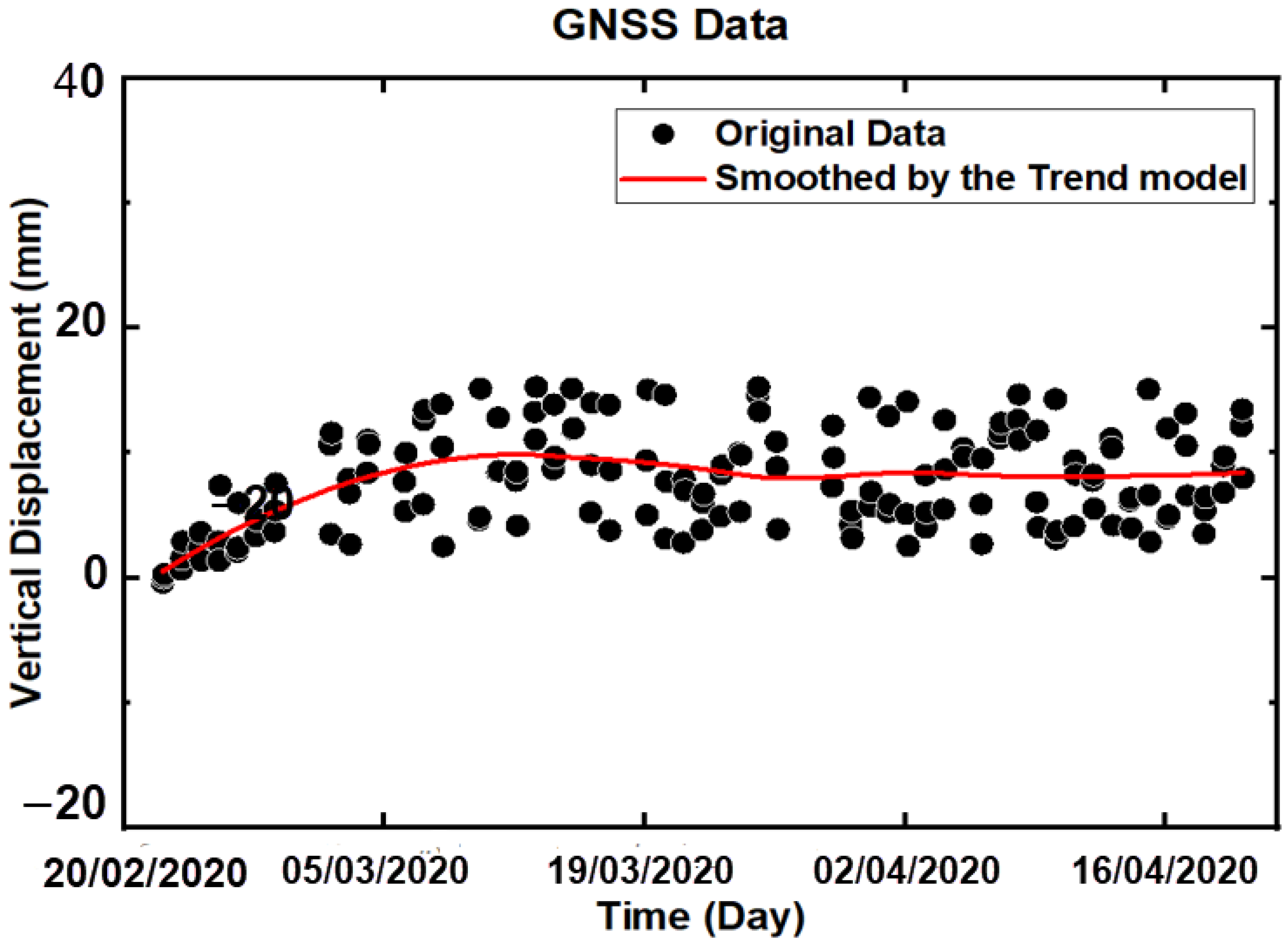
3.2. GNSS Absolute Settlement Calculation over Time
3.3. Total Settlement Calculation Overtime
3.4. MDD/GNSS Data Error Correction
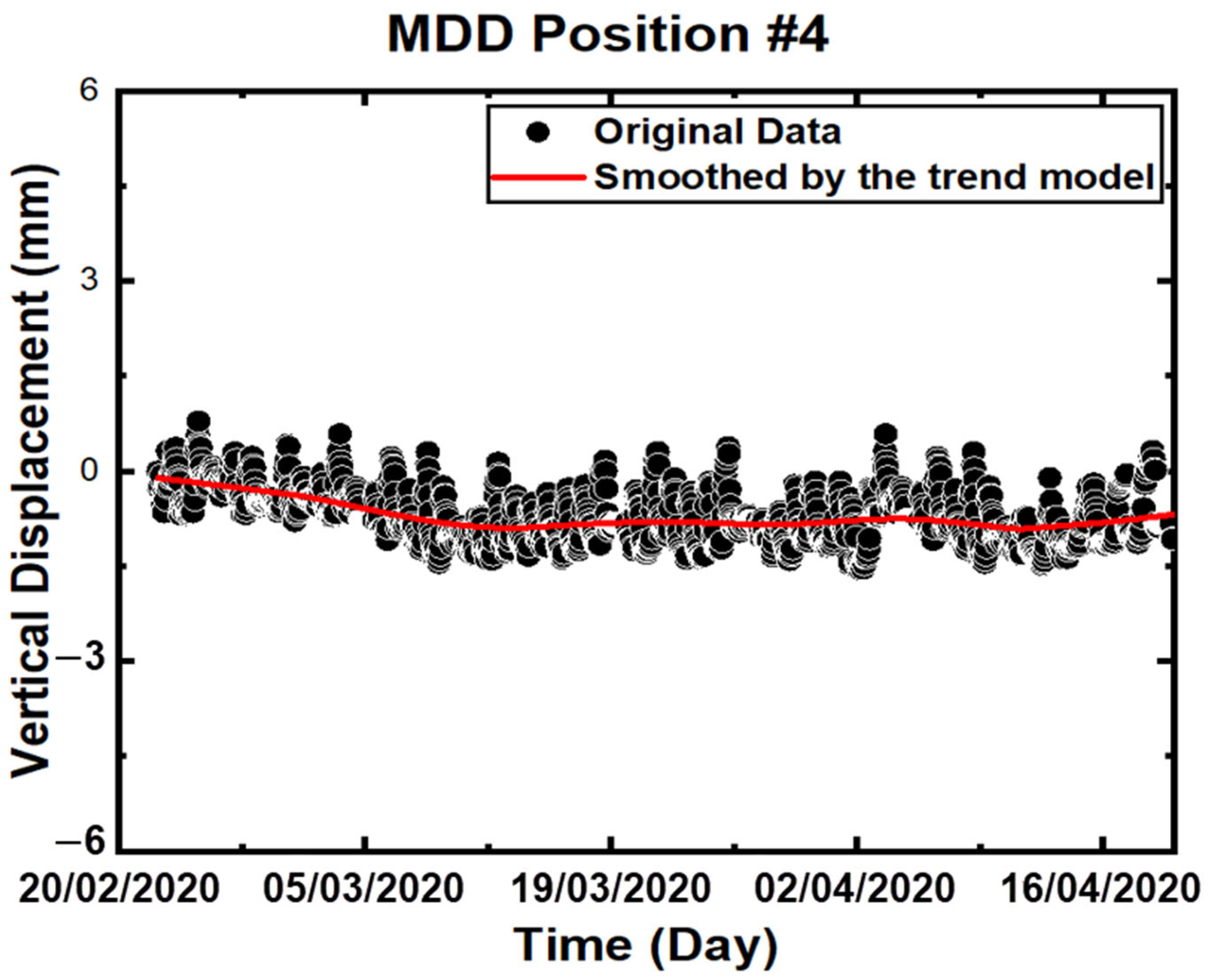
3.4.1. MDD/GNSS Data Analysis by the LOESS Trend Model
3.4.2. MDD/GNSS Data Analysis by a Resampling Method
4. Analysis of Settlement Data and Discussion
4.1. GNSS Settlement Analysis Compared with Total Station Measurement
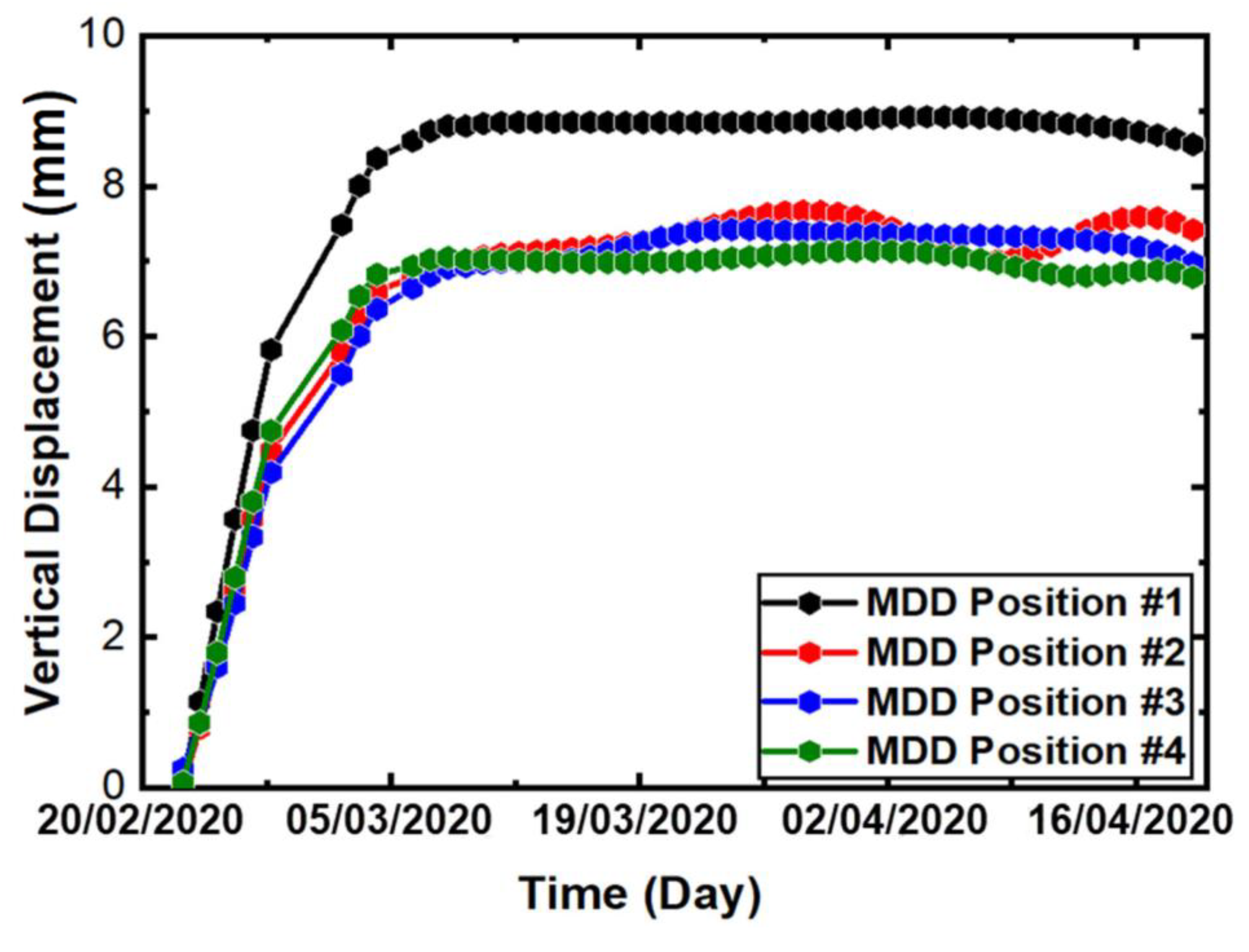
4.2. MDD Settlement Analysis
4.3. MDD-GNSS Total Settlement Analysis
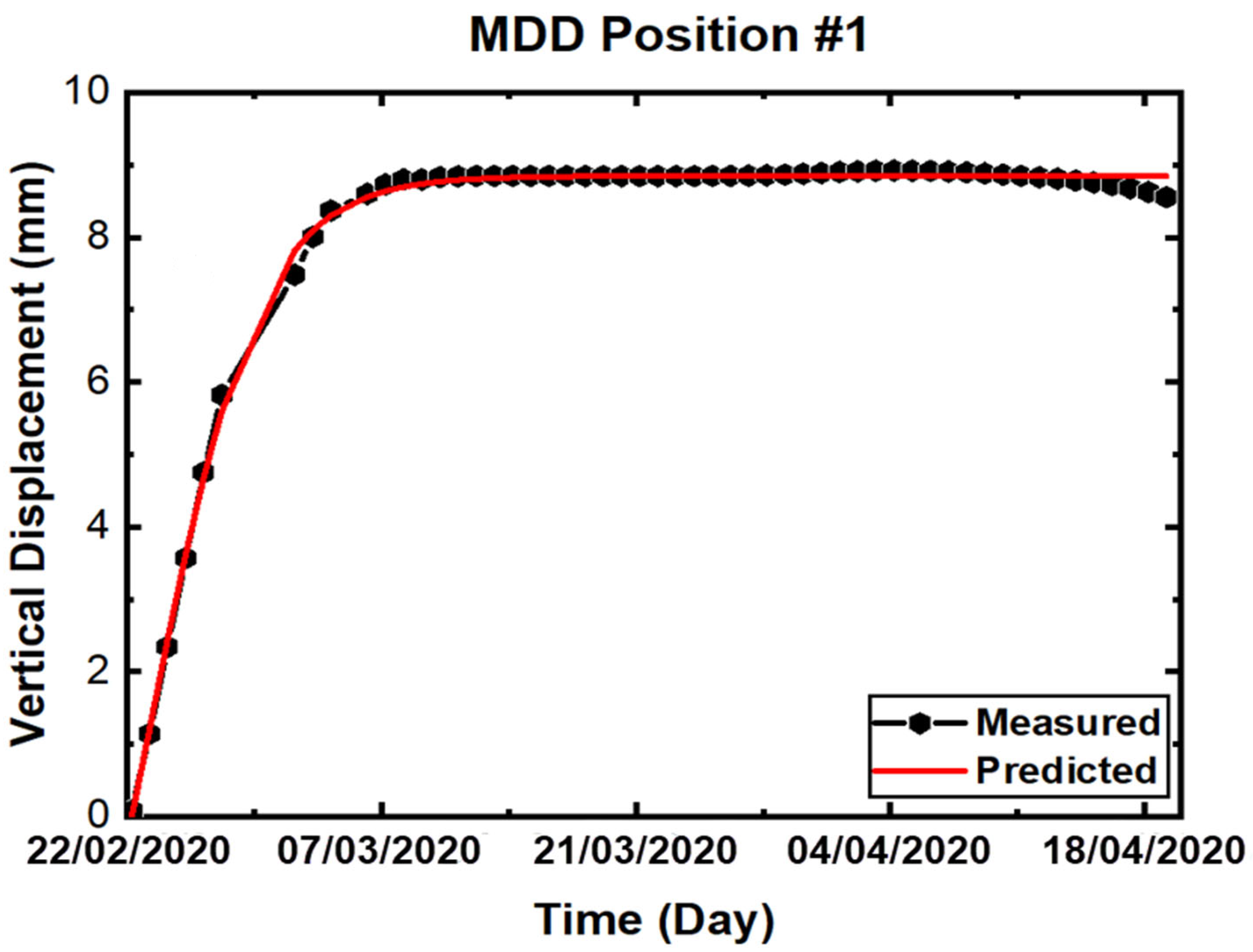
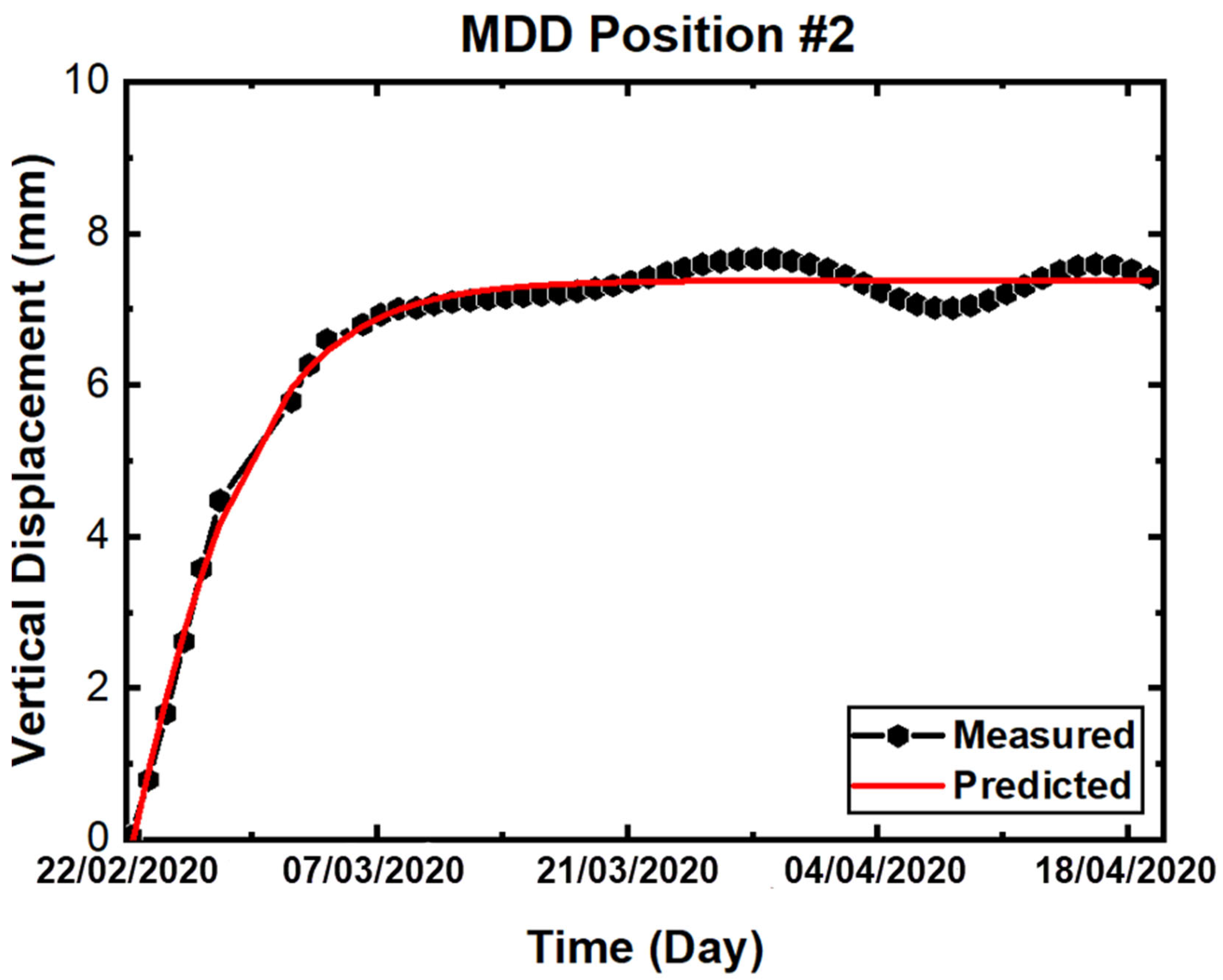
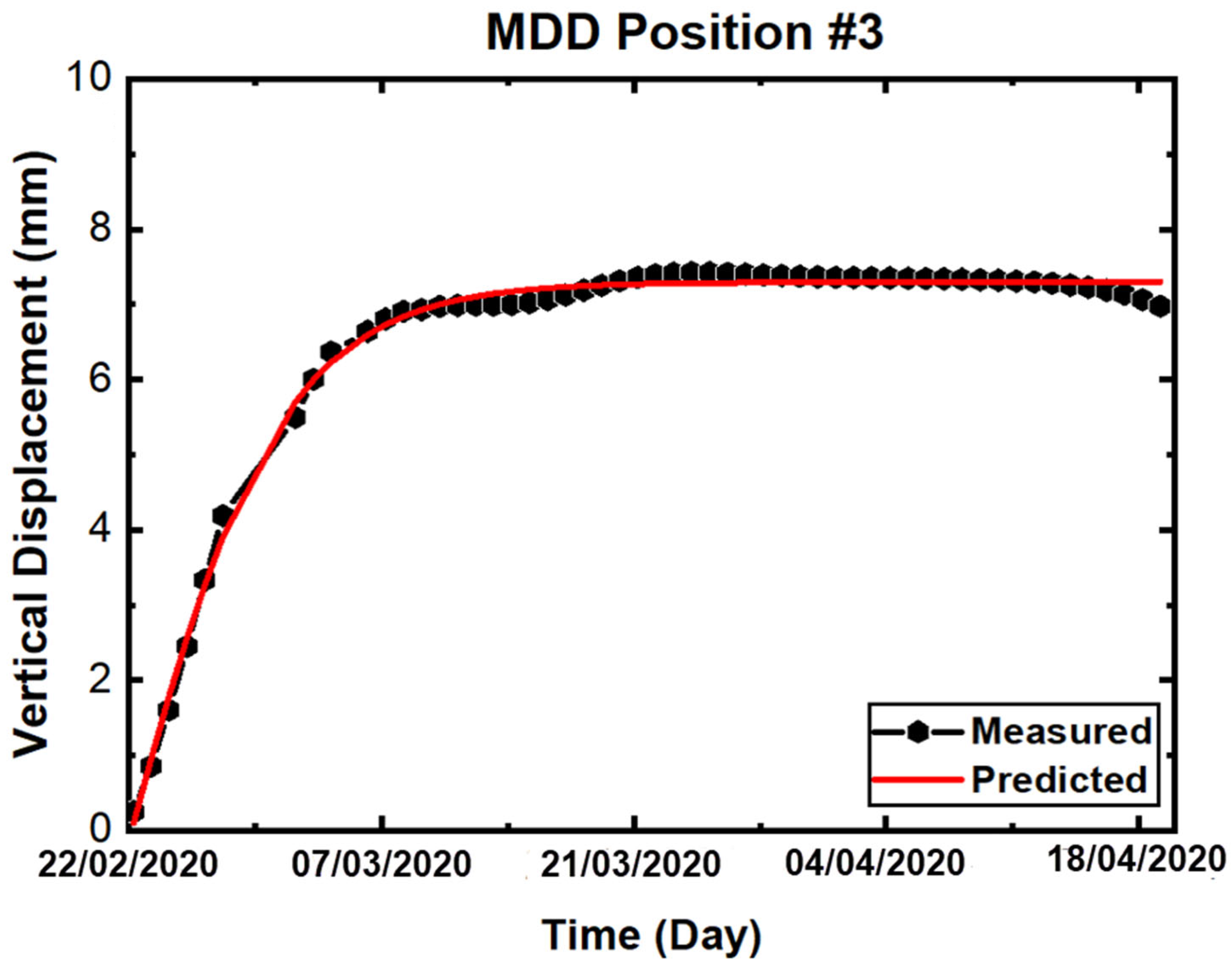
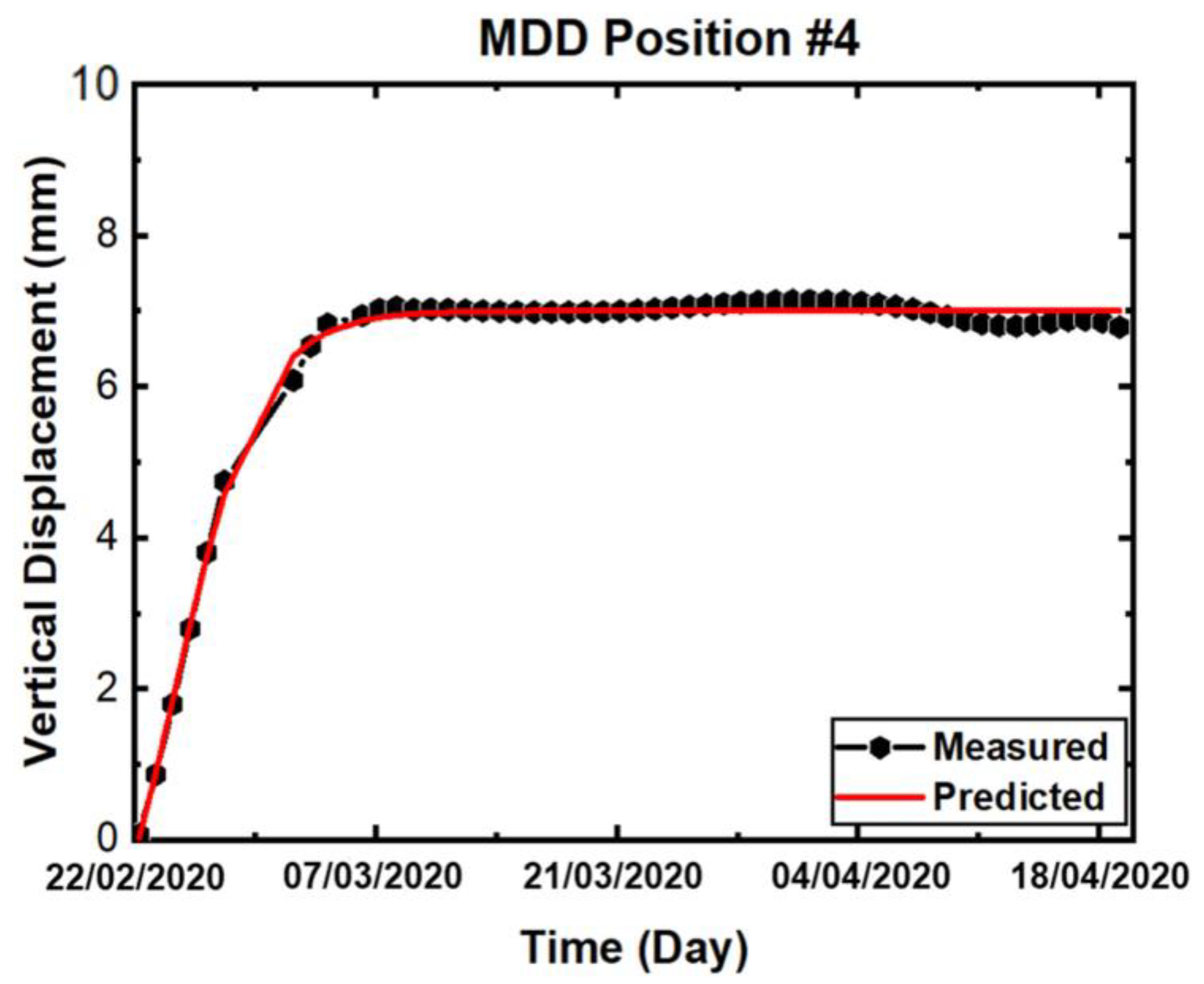
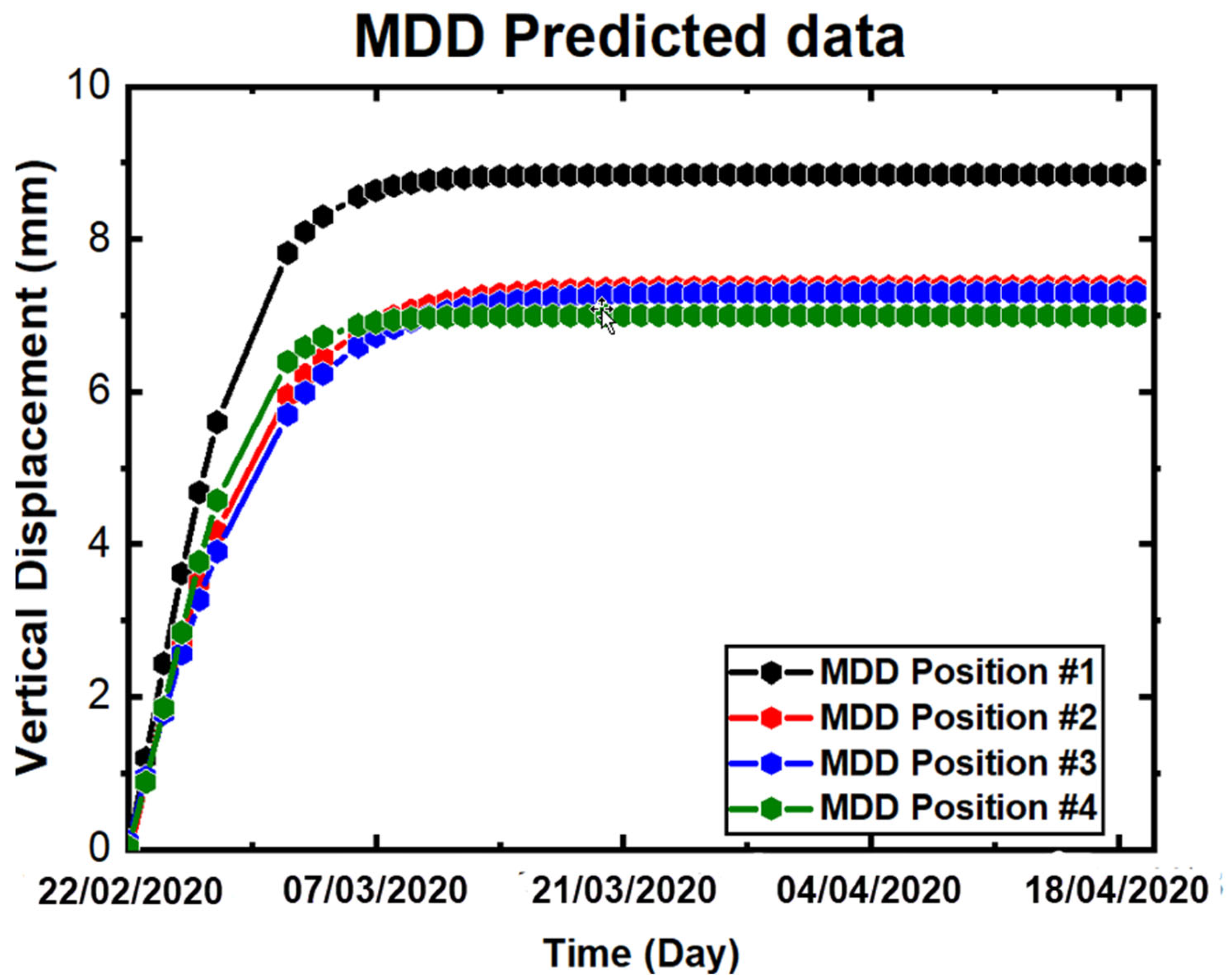
4.4. The MDD/GNSS Settlement Prediction Model
Statistical Analysis for Calculation of Model Coefficients
5. Conclusions
- The monitoring results verified that the combination of MDD with GNSS enhances the capacity to assess effective measurement of the track foundation, providing a more comprehensive perspective on the track monitored system.
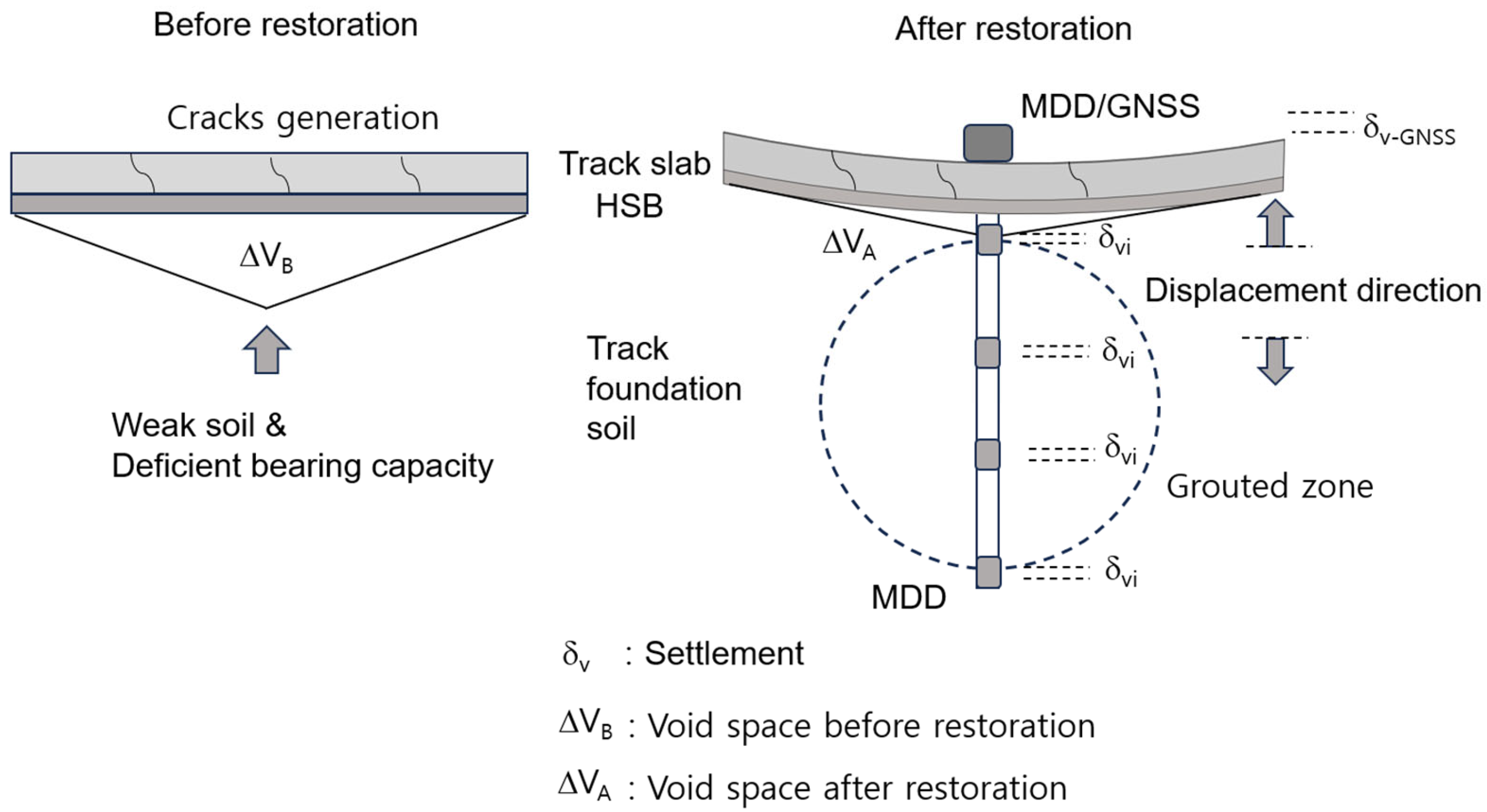
- Since the MDD head is fixed at the rover position on the track slab, the MDD/GNSS system can measure the relative deflection between each track layer and the slab surface as well as the total deflection at the top of the track slab by a GNSS rover receiver simultaneously, which can evade the fixity condition problem of the classic MDD.
- An effective data collection and data transferring system for MDD/GNSS was designed; it works systematically. A real-time monitoring program runs effectively for data storing and for subsequent analysis and processing. By combining the absolute GNSS rover settlement and MDD settlement, an accurate estimation of the total settlement in the concrete slab track layers can be obtained.
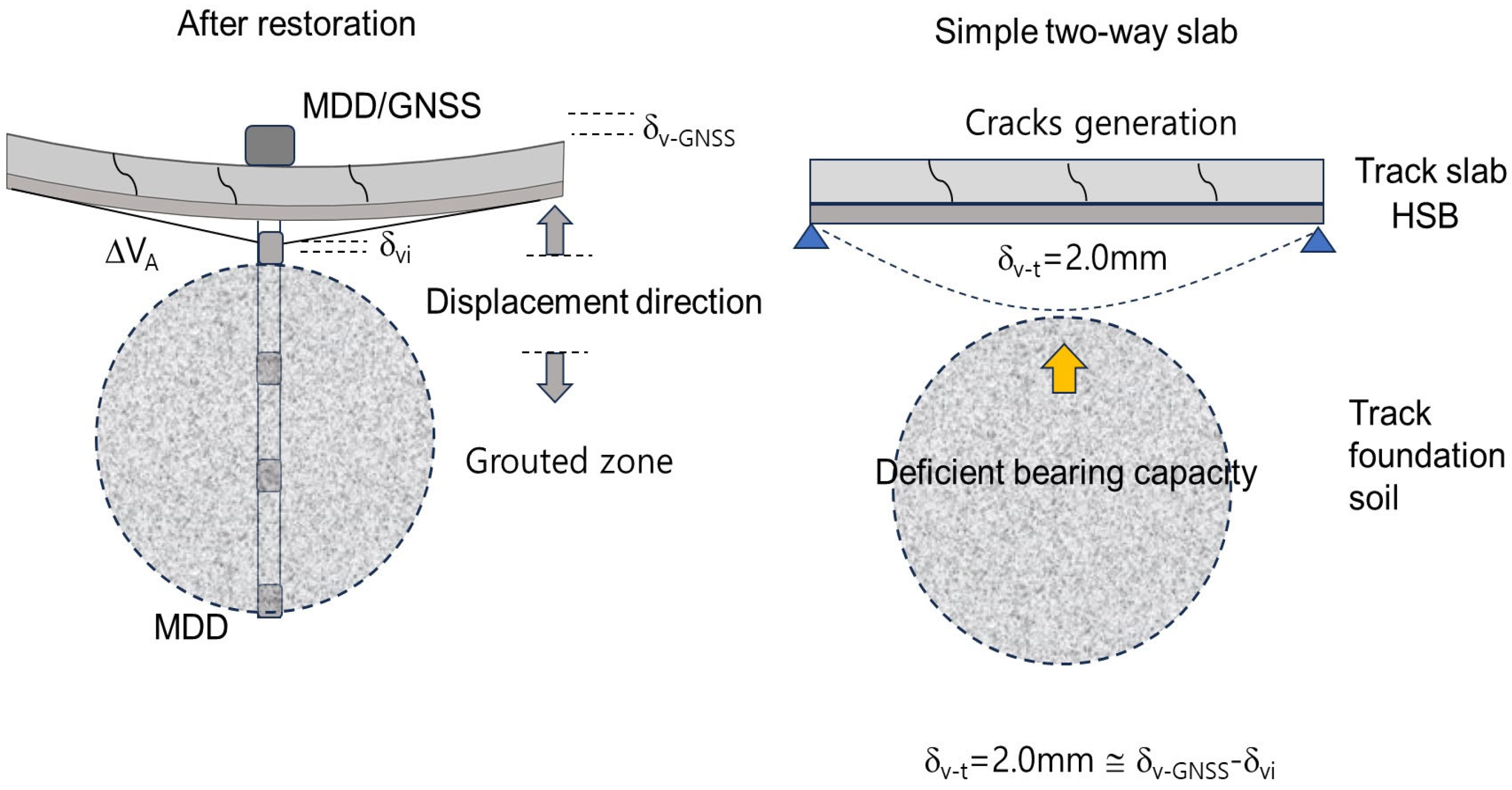
- Deformation values measured at each MDD position, which are calibrated with GNSS measurement at the top of the track slab, providing meaningful details for analyzing repair performance of track foundation soil under track slabs. This study revealed that there may be a reduced size of the void space remaining below the track slab even after restoration at the site. For example, the 2.0 mm difference in total settlement between Position 1 and other positions (2, 3, 4) in the MDD/GNSS system was due to one main reason: The bearing capacity in the track foundation soil near the slab was still not sufficient to resist the slab weight and the train load fully after restoration. This lack of bearing capacity came from the existing small void space below the slab even though its size was reduced somewhat by grouting restoration.
- Analyzing the maximum deflection difference (2.0 mm) at the center of the slab verified that the lack of bearing capacity due to the reduced-size small void space can be compensated for with the flexural stiffness of the slab. The maximum deflection difference measured between the MDD positions using the MDD/GNSS system can be used as evidence for checking performance of previous repair work for track foundation soil.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Matias, S.R.; Ferreira, P.A. Railway slab track systems: Review and research potentials. Struct. Infrastruct. Eng. 2020, 16, 1635–1653. [Google Scholar] [CrossRef]
- Ren, J.; Deng, S.; Zhang, K.; Du, W.; Wu, Q. Design theories and maintenance technologies of slab tracks for high-speed railways in China: A review. Transp. Saf. Environ. 2021, 3, tdab024. [Google Scholar] [CrossRef]
- Park, J.B.; Lim, Y. Development of a settlement prediction model for upper subgrade layers of ballasted tracks. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2021, 235, 801–814. [Google Scholar] [CrossRef]
- Lai, C.C.; Au, H.Y.; Liu, M.S.Y.; Ho, S.L.; Tam, H.Y. Development of level sensors based on fiber bragg grating for railway track differential settlement measurement. IEEE Sens. J. 2016, 16, 6346–6350. [Google Scholar] [CrossRef]
- Nasrollahi, K.; Dijkstra, J.; Nielsen, C.O.J. Towards real-time condition monitoring of a transition zone in a railway structure using Fibre Bragg Grating sensors. Transp. Geotech. 2023, 44, 101166. [Google Scholar] [CrossRef]
- Sasy Chan, Y.W.; Wang, H.-P.; Xiang, P. Optical fiber sensors for monitoring railway infrastructures: A review towards smart concept. Symmetry 2021, 13, 2251. [Google Scholar] [CrossRef]
- Wang, H.; Xiang, P.; Jiang, L. Strain transfer theory of industrialized optical fiber-based sensors in civil engineering: A review on measurement accuracy, design and calibration. Sens. Actuators A Phys. 2019, 285, 414–426. [Google Scholar] [CrossRef]
- De Beer, M.; Horak, E.; Visser, A.T. The Multidepth deflectometer (MDD) system for determining the Effective elastic moduli of pavement layers. In Nondestructive Testing of Pavements and Backcalculation of Moduli; Albert, J., Bush, A.J., III, Gilbert, Y., Baladi, G.Y., Eds.; STP1026-EB; ASTM: West Conshohocken, PA, USA, 1989; pp. 70–89. [Google Scholar] [CrossRef]
- Scullion, T.; Briggs, R.C.; Lytton, R.L. Using the Multidepth Deflectometer to Verify Modulus Backcalculation Procedures. In Nondestructive Testing of Pavements and Backcalculation of Moduli; Albert, J., Bush, A.J., III, Gilbert, Y., Baladi, G.Y., Eds.; STP1026-EB; ASTM International: West Conshohocken, PA, USA, 1989; pp. 90–101. [Google Scholar] [CrossRef]
- Xue, W.; Flintsch, G.W.; Diefenderfer, B.K. Measuring pavement permanent deformation in accelerated pavement testing. Transp. Res. Rec. 2020, 2674, 340–348. [Google Scholar] [CrossRef]
- Cary, C.E.; Wang, Z.; Yin, H.; Garg, N.; Rutter, R. Effect of pavement structure on the mechanical response and performance of perpetual pavements at the national airport pavement test facility. Transp. Res. Rec. 2018, 2672, 31–39. [Google Scholar] [CrossRef]
- Suh, Y.C.; Park, D.W.; Jo, N.H.; Kwon, S.A. Prediction of permanent deformation in full-scale accelerated pavement testing. KSCE J. Civ. Eng. 2012, 16, 579–585. [Google Scholar] [CrossRef]
- Roesler, J.R.; Scheffy, C.W.; Ali, A.; Bush, D. Construction, Instrumentation, and Testing of Fast-Setting Hydraulic Cement Concrete in Palmdale, California; University of California: Berkeley, CA, USA, 2000. [Google Scholar]
- Mishra, D.; Tutumluer, E.; Boler, H.; Hyslip, J.P.; Sussmann, T.R. Railroad Track Transitions with Multidepth Deflectometers and Strain Gauges. Transp. Res. Rec. 2014, 2448, 105–114. [Google Scholar] [CrossRef]
- Johnston, G.; Anna, R.; Grant, H. The international GNSS service. In Springer Handbook of Global Navigation Satellite Systems; Springer: Berlin/Heidelberg, Germany, 2017; pp. 967–982. [Google Scholar]
- Abulude, F.; Akinnusotu, A.; Adeyemi, A. Global Positioning System and It’s Wide Applications. Cont. J. Inf. Technol. 2015, 9, 22–32. [Google Scholar]
- Dai, W.; Huang, D.; Cai, C. Multipath mitigation via component analysis methods for GPS dynamic deformation monitoring. GPS Solut. 2014, 18, 417–428. [Google Scholar] [CrossRef]
- Shimizu, N.; Nakashima, S.; Masunari, T. ISRM suggested method for monitoring rock displacements using the global positioning system (GPS). Rock Mech. Rock Eng. 2014, 47, 313–328. [Google Scholar] [CrossRef]
- Ma, F.; Xi, R.; Xu, N. Analysis of railway subgrade frost heave deformation based on GPS. Geod Geodyn. 2016, 7, 143–147. [Google Scholar] [CrossRef]
- Ngamkhanong, C.; Kaewunruen, S.; Costa, B.J.A. State-of-the-art review of railway track resilience monitoring. Infrastructures 2018, 3, 3. [Google Scholar] [CrossRef]
- Leiva, F.; Pérez, E.; Aguiar, J.; Loría, L. Permanent deformation model for pavement condition assessment Modelo de deformación permanente para la evaluación de la condición del pavimento. Rev. Ing. Construcción 2017, 32, 37–46. [Google Scholar] [CrossRef]
- Kim, N. Evaluation of rutting performance of asphalt concrete layers using multi-depth deflectometers (MDD). KSCE J. Civ Eng 2004, 8, 411–416. [Google Scholar] [CrossRef]
- Rojo, J.; Rivero, R.; Romero-Morte, J.; Fernández-González, F.; Pérez-Badia, R. Modeling pollen time series using seasonal-trend decomposition procedure based on LOESS smoothing. Int. J. Biometeorol. 2017, 61, 335–348. [Google Scholar] [CrossRef]
- Moberly, J.G.; Bernards, M.T.; Waynant, K.V. Key features and updates for origin 2018. J. Cheminformatics 2018, 10, 5. [Google Scholar] [CrossRef]
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements, and Performance, 2nd ed.; Ganga-Jumana Press: Lincoln, MA, USA, 2012. [Google Scholar]
- Takasu, T.; Yasuda, A. Development of the low-cost RTK-GPS receiver with an open-source program package RTKLIB. In Proceedings of the International Symposium on GPS/GNSS, Seogwipo-si, Republic of Korea, 4–6 November 2009; Volume 1, pp. 1–6. [Google Scholar]
- Kim, H.I.; Yu, G.S.; Park, K.D.; Ha, J.H. Accuracy evaluation of VRS RTK surveys inside the GPS CORS network operated by National Geographic Information Institute. JKSGPC 2008, 26, 139–147. [Google Scholar]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R.; Taylor, J. Resampling methods. In An Introduction to Statistical Learning: With Applications in Python; Springer International Publishing: Cham, Switzerland, 2023; pp. 201–228. [Google Scholar]
- Chernick, M.R.; LaBudde, R.A. An Introduction to Bootstrap Methods with Applications to R; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Lahiri, S.N.; Zhu, J. Resampling methods for spatial regression models under a class of stochastic designs. Ann. Statist. 2006, 34, 1774–1813. [Google Scholar] [CrossRef]
- Lee, I.W. Suggestion of requirement for settlement restoration method considering running stability and track Serviceability. JKSR 2020, 23, 395–406. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coordinate | Value |
|---|---|
| Latitude | 35°47′11.5474″ |
| Longitude | 127°12′00.3094″ |
| Height (m) | 104.090 |
| MDD | Parameter | Value | Standard Error | R2 |
|---|---|---|---|---|
| Position #1 | y0 | 8.895 | 0.00645 | 0.98868 |
| A | −10.12 | 0.03786 | ||
| R0 | −0.00897 | 5.25641 × 10−5 | ||
| Position #2 | y0 | 7.4166 | 0.000 | 0.99999 |
| A | −8.37913 | 0.000 | ||
| R0 | −0.0075 | 0.000 | ||
| Position #3 | y0 | 7.34331 | 0.00642 | 0.98797 |
| A | −8.16207 | 0.03057 | ||
| R0 | −0.00692 | 4.25569 × 10−5 | ||
| Position #4 | y0 | 7.04242 | 0.00668 | 0.9808 |
| A | −8.27055 | 0.04067 | ||
| R0 | −0.00945 | 7.22496 × 10−5 |
| E (×107, kPa) | I (m4) | B (m) | H (m) | EI (kNm2) | L (m) |
|---|---|---|---|---|---|
| 0.8 | 0.0036864 | 3.2 | 0.24 | 29,491.2 | 2.53 |
| 1.6 | 0.0036864 | 3.2 | 0.24 | 58,982.4 | 3.01 |
| 2.4 | 0.0036864 | 3.2 | 0.24 | 88,473.6 | 3.33 |
| 3.2 | 0.0036864 | 3.2 | 0.24 | 117,964.8 | 3.58 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bahati, P.A.; Le, V.D.; Lim, Y. A Multi-Depth Deflectometer/Global Navigation Satellite System Method for Measuring Concrete Slab Track Deformation. Appl. Sci. 2024, 14, 82. https://doi.org/10.3390/app14010082
Bahati PA, Le VD, Lim Y. A Multi-Depth Deflectometer/Global Navigation Satellite System Method for Measuring Concrete Slab Track Deformation. Applied Sciences. 2024; 14(1):82. https://doi.org/10.3390/app14010082
Chicago/Turabian StyleBahati, Pierre Anthyme, Viet Dinh Le, and Yujin Lim. 2024. "A Multi-Depth Deflectometer/Global Navigation Satellite System Method for Measuring Concrete Slab Track Deformation" Applied Sciences 14, no. 1: 82. https://doi.org/10.3390/app14010082
APA StyleBahati, P. A., Le, V. D., & Lim, Y. (2024). A Multi-Depth Deflectometer/Global Navigation Satellite System Method for Measuring Concrete Slab Track Deformation. Applied Sciences, 14(1), 82. https://doi.org/10.3390/app14010082