
Multiscale Feature-Based Infrared Ship Detection

Abstract
:1. Introduction
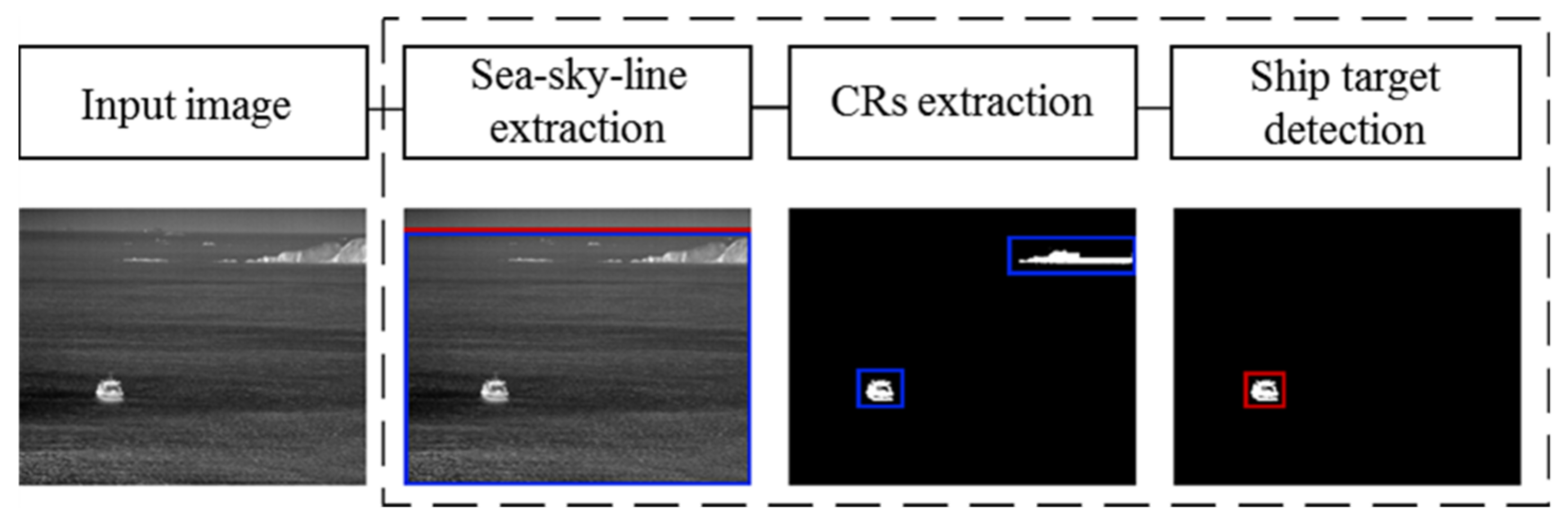
2. Materials and Methods
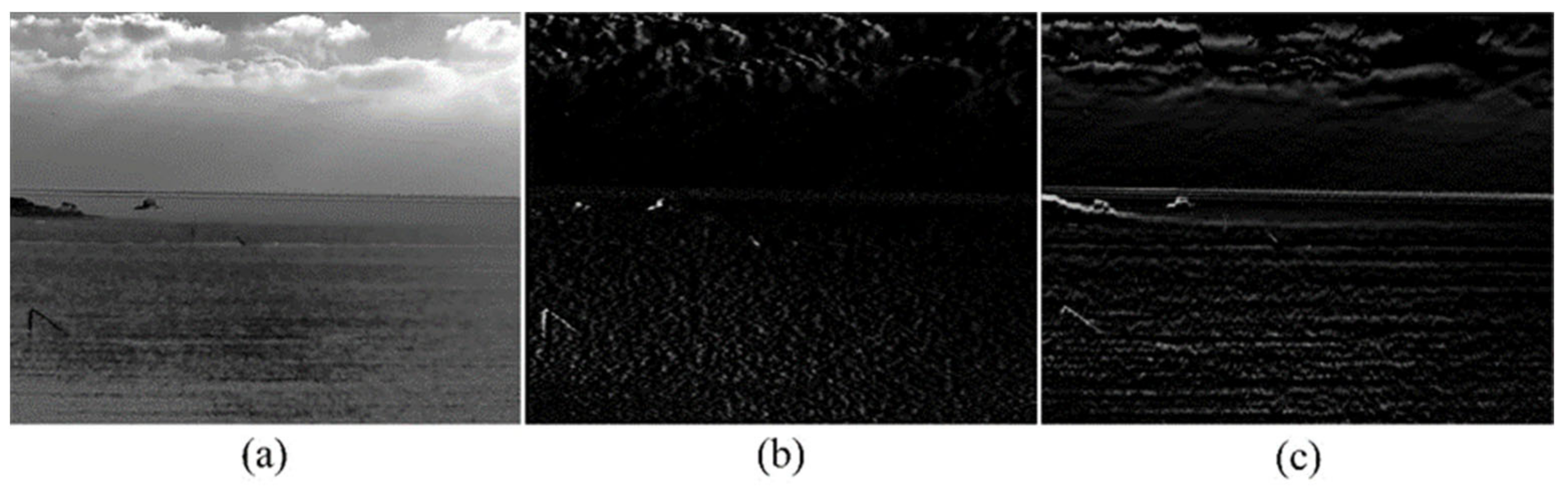
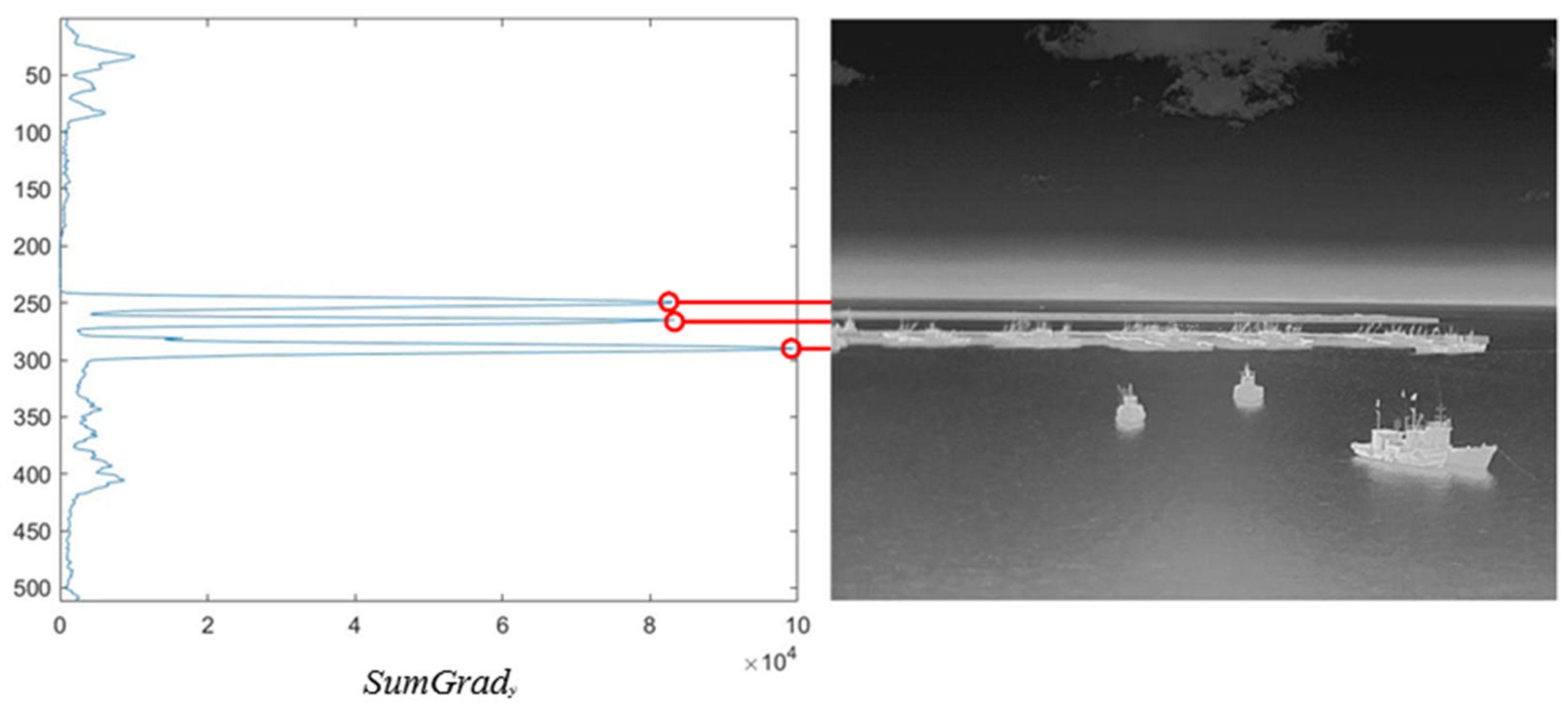
2.1. Multiscale Gradient Feature-Based Sea–Sky Line Extraction
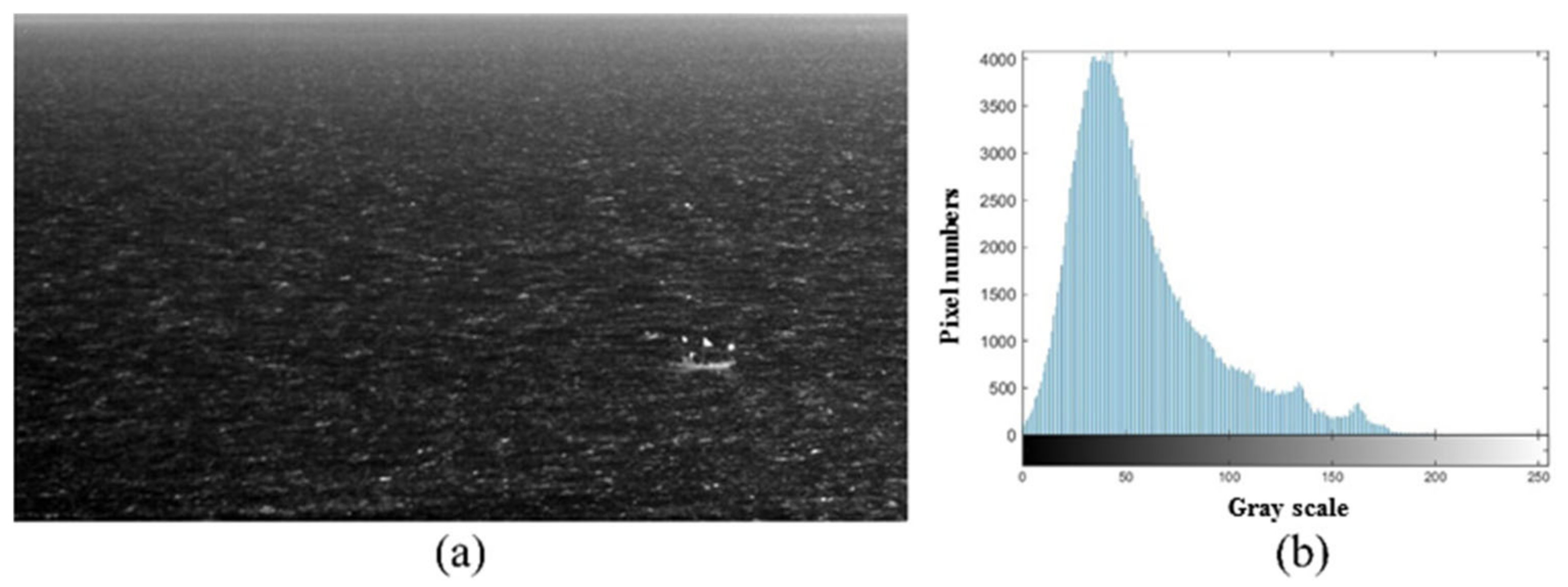
2.2. Candidate-Region Extraction Based on Grayscale and Edge Features
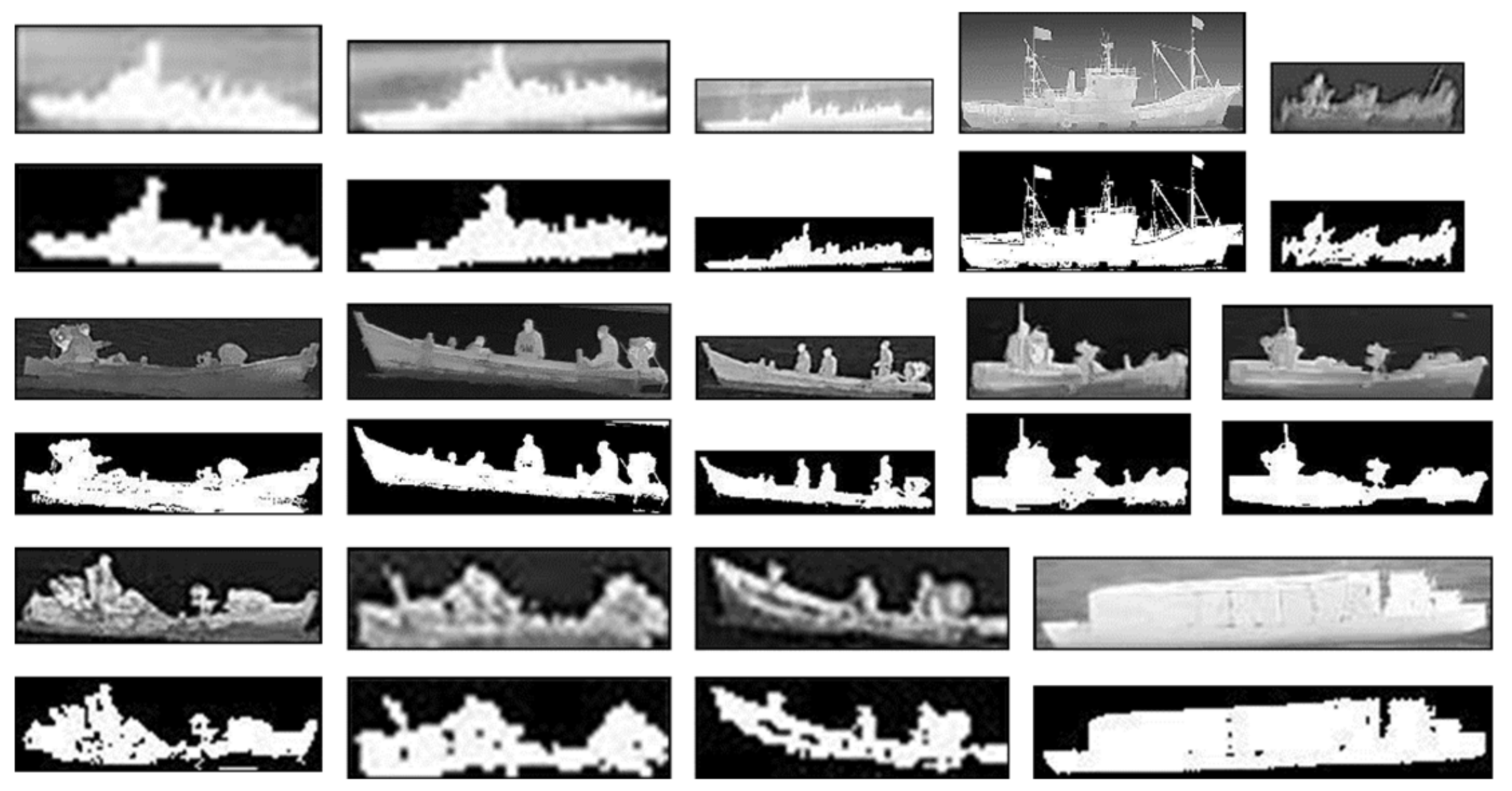
2.3. Ship Targets Extraction Based on Shape Features
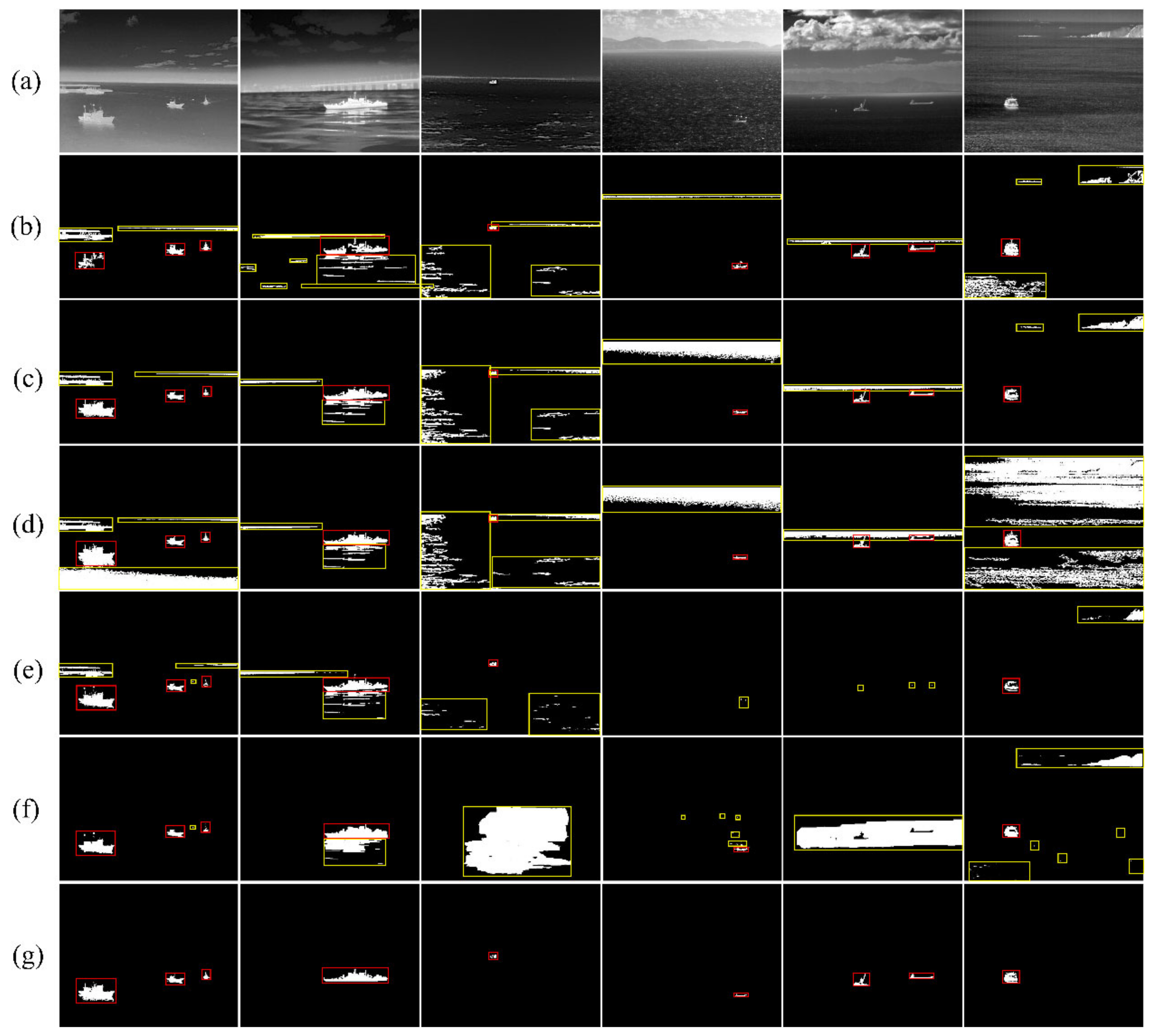
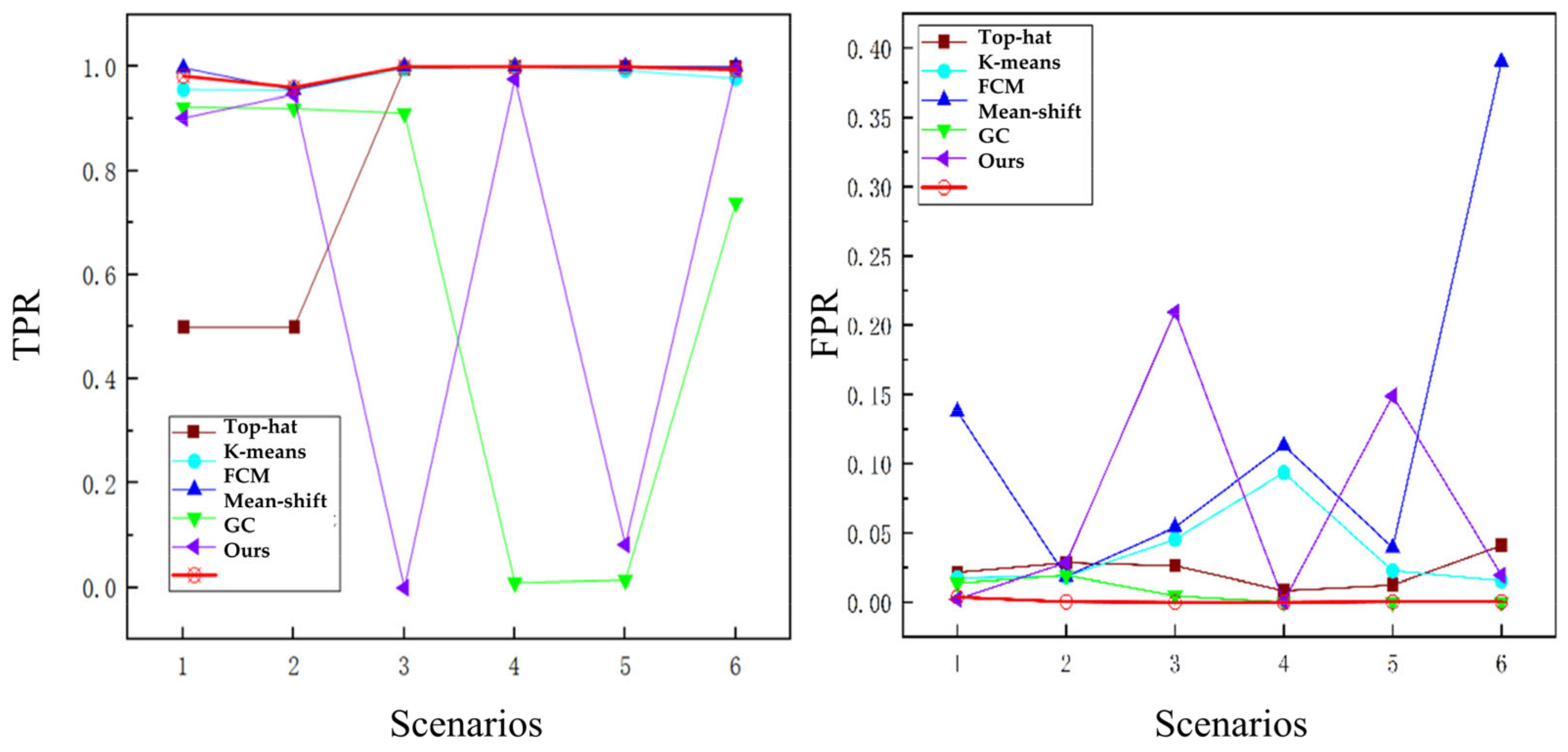
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Prasad, D.; Rajan, D.; Rachmawati, L.; Rajabaly, E.; Quek, C. Video Processing from Electro-Optical Sensors for Object Detection and Tracking in a Maritime Environment: A Survey. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1993–2016. [Google Scholar] [CrossRef]
- Zhang, Z.; Shao, Y.; Tian, W.; Wei, Q.; Zhang, Y.; Zhang, Q. Application Potential of GF-4 Images for Dynamic Ship Monitoring. IEEE Geosci. Remote Sens. Lett. 2017, 14, 911–915. [Google Scholar] [CrossRef]
- Bai, X.; Zhou, F.; Jin, T.; Xie, Y. Infrared Small Target Detection and Tracking under the Conditions of Dim Target Intensity and Clutter Background. Proc. SPIE 2007, 6786, 683–691. [Google Scholar] [CrossRef]
- Wang, B.; Motai, Y.; Dong, L.; Xu, W. Detecting Infrared Maritime Targets Overwhelmed in Sun Glitters by Antijitter Spatiotemporal Saliency. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5159–5173. [Google Scholar] [CrossRef]
- Li, Y.; Li, Z.; Zhu, Y.; Li, B.; Xiong, W.; Huang, Y. Thermal Infrared Small Ship Detection in Sea Clutter Based on Morphological Reconstruction and Multi-Feature Analysis. Appl. Sci. 2019, 9, 3786. [Google Scholar] [CrossRef]
- Gao, C.; Deyu, M.; Yang, Y.; Wang, Y.; Zhou, X.; Hauptman, A. Infrared Patch-Image Model for Small Target Detection in a Single Image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef] [PubMed]
- Zhou, A.; Xie, W.; Pei, J. Background Modeling in the Fourier Domain for Maritime Infrared Target Detection. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 2634–2649. [Google Scholar] [CrossRef]
- Zhou, A.; Xie, W.; Pei, J. Background Modeling Combined with Multiple Features in the Fourier Domain for Maritime Infrared Target Detection. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–15. [Google Scholar] [CrossRef]
- Zhou, A.; Xie, W.; Pei, J. Maritime Infrared Target Detection Using a Dual-Mode Background Model. Remote Sens. 2023, 15, 2354. [Google Scholar] [CrossRef]
- Fang, L.; Zhao, W.; Li, X.; Wang, X. A Convex Active Contour Model Driven by Local Entropy Energy with Applications to Infrared Ship Target Segmentation. Opt. Laser Technol. 2017, 96, 166–175. [Google Scholar] [CrossRef]
- Fang, L.; Wang, X.; Wan, Y. Adaptable Active Contour Model with Applications to Infrared Ship Target Segmentation. J. Electron. Imaging 2016, 25, 041010. [Google Scholar] [CrossRef]
- Liu, J.; Zhou, F.; Chen, X.; Bai, X.; Sun, C. Iterative Infrared Ship Target Segmentation Based on Multiple Features. Pattern Recognit. 2014, 47, 2839–2852. [Google Scholar] [CrossRef]
- Liu, J.; Bai, X.; Sun, C.; Zhou, F.; Li, Y. Infrared Ship Target Segmentation through Integration of Multiple Feature Maps. Image Vis. Comput. 2016, 48, 14–25. [Google Scholar] [CrossRef]
- Bai, X.; Chen, Z.; Zhang, Y.; Liu, J.; Lu, Y. Spatial Information Based FCM for Infrared Ship Target Segmentation. In Proceedings of the 2014 IEEE International Conference on Image Processing, ICIP 2014, Paris, France, 27–30 October 2014; Volume 46, pp. 5127–5131. [Google Scholar] [CrossRef]
- Li, L.; Jiang, L.; Zhang, J.; Wang, S.; Chen, F. A Complete YOLO-Based Ship Detection Method for Thermal Infrared Remote Sensing Images under Complex Backgrounds. Remote Sens. 2022, 14, 1534. [Google Scholar] [CrossRef]
- Han, Y.; Liao, J.; Lu, T.; Pu, T.; Peng, Z. KCPNet: Knowledge-Driven Context Perception Networks for Ship Detection in Infrared Imagery. IEEE Trans. Geosci. Remote Sens. 2022, 61, 1–19. [Google Scholar] [CrossRef]
- Wu, T.; Li, B.; Luo, Y.; Wang, Y.; Xiao, C.; Liu, T.; Yang, J.; An, W.; Guo, Y. MTU-Net: Multi-Level TransUNet for Space-Based Infrared Tiny Ship Detection. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–15. [Google Scholar] [CrossRef]
- Kapur, J.N.; Sahoo, P.; Wong, A.K.C. A New Method for Gray-Level Picture Thresholding Using the Entropy of the Histogram. Comput. Vis. Graph. Image Process. 1980, 29, 273–285. [Google Scholar] [CrossRef]
- Yen, J.-C.; Chang, F.-J.; Chang, S. New Criterion for Automatic Multilevel Thresholding. Image Process. IEEE Trans. 1995, 4, 370–378. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Quantity | Minimum | Mean | Maximum |
|---|---|---|---|
| 1.0402 | 4.2566 | 13.4242 | |
| 17.6075 | 65.4393 | 137.6387 | |
| 0.3827 | 0.5514 | 0.8213 | |
| 0.1035 | 0.2141 | 0.3948 |
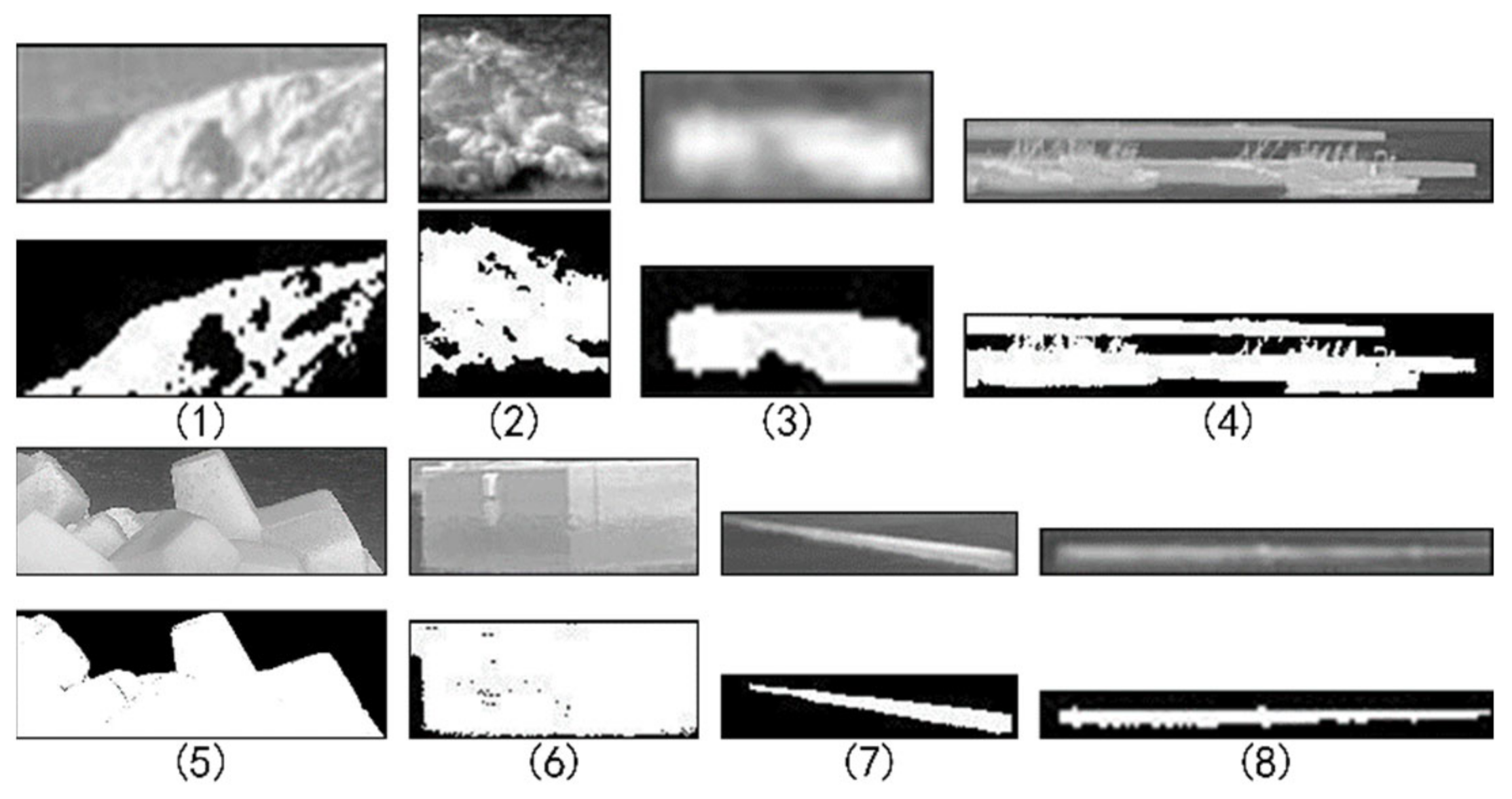
| Num. | FWH | FZ | FD | FC | Judgment Results |
|---|---|---|---|---|---|
| (1) | 2.3889 | 36.4018 | 0.8717 | 0.2739 | FD > FD_H, Non-target |
| (2) | 0.9667 | 40.8619 | 0.8291 | 0.3412 | FD > FD_H, Non-target |
| (3) | 3.3333 | 23.3506 | 0.8979 | 0.2714 | FD > FD_H, Non-target |
| (4) | 6.5526 | 226.3472 | 0.5453 | 0.2561 | FZ > FZ_H, Non-target |
| (5) | 2.9632 | 185.8927 | 0.5574 | 0.2166 | FZ > FZ_H, Non-target |
| (6) | 2.5098 | 21.7075 | 0.9448 | 0.3397 | FD > FD_H, Non-target |
| (7) | 5.0800 | 87.2140 | 0.2626 | 0.1184 | FD < FD_L, Non-target |
| (8) | 19.6000 | 145.2449 | 0.5775 | 0.0737 | FWH > FWH_H, Non-target |
| Top-Hat | K-Means | FCM | Mean-Shift | GC | Our Method | ||
|---|---|---|---|---|---|---|---|
| S1 | TPR | 0.4992 | 0.9558 | 0.9973 | 0.9225 | 0.9010 | 0.9817 |
| FPR | 0.0215 | 0.0177 | 0.1376 | 0.0138 | 0.0022 | 0.0038 | |
| S2 | TPR | 0.4992 | 0.9547 | 0.9547 | 0.9196 | 0.9466 | 0.9598 |
| FPR | 0.0285 | 0.0186 | 0.0186 | 0.0194 | 0.0286 | 0.0004 | |
| S3 | TPR | 0.9960 | 0.9960 | 1.0000 | 0.9101 | 0.0000 | 1.0000 |
| FPR | 0.0263 | 0.0454 | 0.0541 | 0.0047 | 0.20947 | 0.0000 | |
| S4 | TPR | 1.0000 | 1.0000 | 1.0000 | 0.0097 | 0.97573 | 1.0000 |
| FPR | 0.0084 | 0.0935 | 0.1132 | 0.0001 | 0.0006 | 0.0000 | |
| S5 | TPR | 1.0000 | 0.9922 | 1.0000 | 0.0146 | 0.0828 | 1.0000 |
| FPR | 0.0124 | 0.0227 | 0.0394 | 0.0000 | 0.1490 | 0.0003 | |
| S6 | TPR | 1.0000 | 0.9772 | 1.0000 | 0.7392 | 0.9952 | 0.9937 |
| FPR | 0.0410 | 0.0155 | 0.3902 | 0.0060 | 0.0195 | 0.0003 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, D.; Tang, H.; Teng, L.; Tan, J.; Wang, M.; Tian, Z.; Wang, L. Multiscale Feature-Based Infrared Ship Detection. Appl. Sci. 2024, 14, 246. https://doi.org/10.3390/app14010246
Lu D, Tang H, Teng L, Tan J, Wang M, Tian Z, Wang L. Multiscale Feature-Based Infrared Ship Detection. Applied Sciences. 2024; 14(1):246. https://doi.org/10.3390/app14010246
Chicago/Turabian StyleLu, Dongming, Haolong Tang, Longyin Teng, Jiangyun Tan, Mengke Wang, Zechen Tian, and Liping Wang. 2024. "Multiscale Feature-Based Infrared Ship Detection" Applied Sciences 14, no. 1: 246. https://doi.org/10.3390/app14010246
APA StyleLu, D., Tang, H., Teng, L., Tan, J., Wang, M., Tian, Z., & Wang, L. (2024). Multiscale Feature-Based Infrared Ship Detection. Applied Sciences, 14(1), 246. https://doi.org/10.3390/app14010246