PRESCAN is used to build the above scenario, and PRESCAN is combined with MATLAB (R2020a) to conduct AEB simulation.
3.1. Simulation Vehicle and AEB System Construction
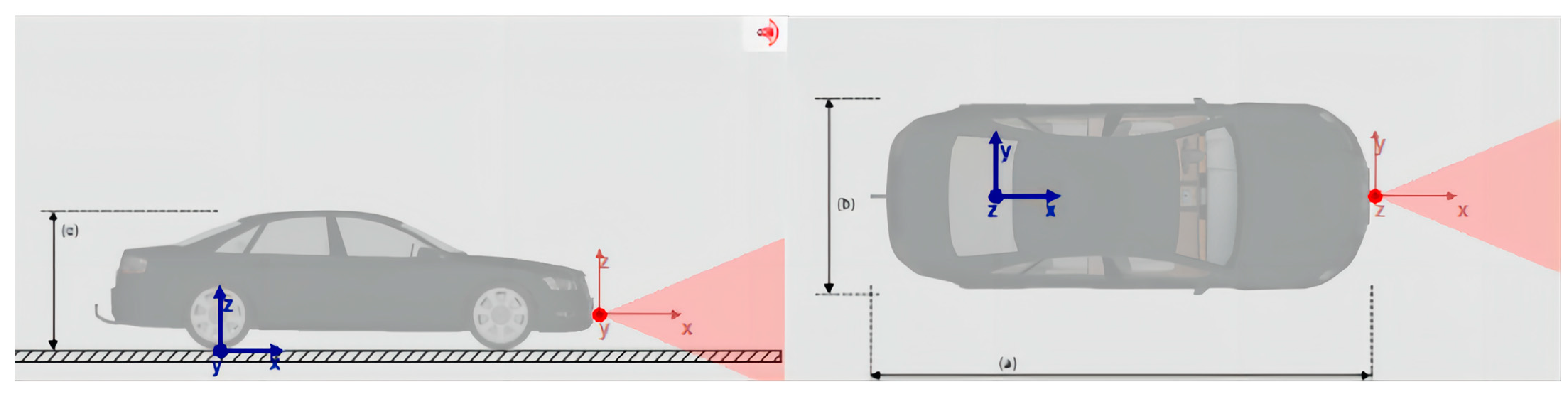
The Audi A8 has been selected as the test vehicle, with the Tesla Model 3 serving as the lead vehicle. To simulate millimeter-wave radar or lidar, two TIS sensors have been employed, with TIS1 designated for long-range sensing and TIS2 for blind-spot sensing. The coordinate origin is depicted in
Figure 6, while
Table 3 outlines the sensor positions, scanning methods, scanning frequencies, sensing ranges, sensing angles, and other pertinent parameters.
In Simulink, we created a simulation of an ego car. The AEB system model, driver model, sensor model, ego vehicle model, and tire model are all built-in models provided by PRESCAN.
Here, we establish data connections between different modules to form a complete AEB system. The ego vehicle model outputs the relevant kinematic data of the vehicle, including the speed and yaw rate, which are then fed into the path tracking module. This module utilizes PID control to enable the vehicle to track a pre-determined motion trajectory, and subsequently outputs information such as throttle opening to the vehicle’s dynamic model and tire model, thereby simulating realistic vehicle behavior.
The AEB system module receives outputs from both the sensor model and the driver model. The main information includes the speed and yaw angle of the ego vehicle, as well as the distance and angle of the target objects detected by TIS1 and TIS2, the status signals and brake signals output by the driver model, and the engine speed. The AEB system is structured as a three-level system, using the Time-to-Collision (TTC) as the warning threshold. When TTC reaches 2.6 s, the driver is alerted. When TTC reaches 1.6 s, 40% brake pressure is applied. When TTC reaches 0.6 s, full brake pressure is applied. The actions taken at different TTC warning levels are summarized in
Table 4.
The difference between the Autonomous Emergency Braking (AEB) system and the Pre-emptive Braking System needs to be discussed here. The differences between them are as follows:
Triggering Mechanism: The AEB system automatically engages the brakes when the vehicle detects an imminent collision. It utilizes sensors and algorithms to monitor obstacles ahead and proactively initiates braking maneuvers when collision risks are identified. On the other hand, the Pre-emptive Braking System applies braking force in advance when potential collisions or hazardous situations are predicted, aiming to reduce collision risks.
Active vs. Passive Operation: The AEB system is an active safety system that autonomously performs emergency braking without reliance on driver input. In contrast, the Pre-emptive Braking System typically functions as an auxiliary feature, providing warnings or assisting with braking but still requiring appropriate driver actions to avoid collisions.
Operational Strategy: The AEB system’s strategy is focused on minimizing the severity of collisions by swiftly engaging emergency braking once collision risks are detected. Conversely, the Pre-emptive Braking System employs a strategy of applying braking force in advance to prevent potential collisions, offering additional safety assistance to the driver.
3.2. Scenario Test and Analysis
Our proposed methods will be discussed here, including 1. Data Missing Estimation (DME) Scene architecture method, 2. C-AEB (curve AEB) Test method, 3. Boundary collision evaluation model (BCEM) Evaluation model.
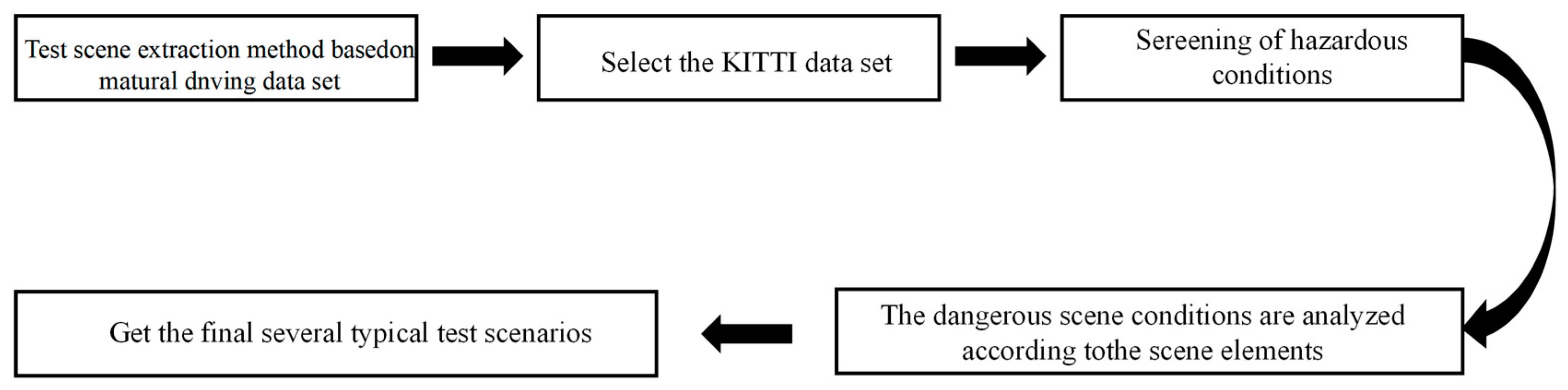
We proposed the DME (Data Missing Estimation) method for scene construction, which addresses the lack of accurate data on the positions and distances of relevant traffic participants in the natural driving dataset. Additionally, we propose the C-AEB (Curve-AEB) model for non-standard AEB testing in curved road scenarios and the BCEM (Boundary collision evaluation model) for assessing non-standard AEB performance specifically in curved road scenarios. Subsequently, we create the scenarios in PRESCAN and develop the AEB system using SIMULINK in MATLAB. Finally, we conduct simulation testing and perform evaluation analysis.
Here, we will construct the selected image scenes in PRESCAN and develop an experimental plan. Since dangerous scenarios are continuous in time, and the natural driving dataset lacks accurate data on the positions and distances of relevant traffic participants, the focus of the scenario testing is on the performance of the AEB system in this scenario rather than the performance of a specific test case within the scenario. Therefore, we assume that the positions of the ego vehicle and obstacle vehicles within the feasible driving area are uniformly distributed in the same scenario. Drawing inspiration from the commonly used 5-point sampling method in biology, we propose a “Data Missing Estimation” for AEB system testing to test the overall scenario. The specific approach is as follows:
For scenarios where the ego vehicle and obstacle vehicle intersect (such as at intersections or merging lanes), we will use the intersection point of the lane centerlines as the collision center point. Two collision points will be arranged equidistantly on either side of the collision center point, resulting in a total of five collision points (the collision point here refers to the coordinate point at which the car collides with the car in front of it in the current scene).
For curved road scenarios, since the trajectories of the ego vehicle and obstacle vehicle overlap, we will divide the curved road into five segments and place a collision point at the center of each segment, resulting in a total of five collision points.
For straight road scenarios, we will set five collision points at equal distances along the road.
- 2.
C-AEB (curve AEB) Test method
Based on the CN-cap testing standard, we propose a testing methodology specifically designed for curved road scenarios, called C-AEB (Curve-Aware Emergency Braking). In this methodology, the test cases for each scenario are divided into three categories: Lead Vehicle Stationary (CCRs), Lead Vehicle Slow Moving (CCRm), and Lead Vehicle Decelerating (CCRb).
Unlike the testing standard, the Lead Vehicle Stationary category involves the lead vehicle being stationary at five different points. The test vehicle starts from 0 km/h and incrementally increases its speed by 5 km/h until a collision occurs.
In the Lead Vehicle Slow Moving category, the lead vehicle travels at speeds of 10 km/h, 20 km/h, and 30 km/h. The starting position of the test vehicle is not fixed but remains outside the perception range. The final collision point is set at the aforementioned five points.
For the Lead Vehicle Decelerating category, the setup is similar to the Lead Vehicle Slow Moving category. However, there are no restrictions on the initial speed and position of the lead vehicle, as long as it is outside the perception range. Only the final collision point is set at the aforementioned five points.
- 3.
BCEM (Boundary collision evaluation model) Evaluation model
We propose a boundary collision evaluation model referred to as BCEM (Boundary Collision Evaluation Model). Based on the analyzed physical quantities, we can define the scenario type as T, the stationary lead vehicle scenario as
, the slow-moving lead vehicle scenario as
, and the decelerating lead vehicle scenario as
. The initial speed of the lead vehicle is
, the safety boundary speed is
, the maximum safety boundary collision speed is
, and the maximum safety boundary collision speed for a straight road is
. The performance decay rate is defined as
, and the AEB system implemented here is designed for straight paths, which have been shown to have the best performance in the experiments, we will use the maximum safety boundary collision speed for the straight road as the evaluation benchmark. The maximum safety boundary speed refers to the minimum collision speed corresponding to the test of five collision points in this scenario, and the minimum speed is taken as the evaluation of its safety performance, because for the AEB system, there is the possibility of unsafe collision, so the name of the boundary is also introduced here. The maximum safety boundary collision speed refers to the speed from 1 km/h on the straight road until the collision occurs. The performance decay rate
is defined as Equation (1), and the average performance decay rate
is defined as Equation (2) to describe the average performance decay of the three test cases:
,
,
, (
refers to the attenuation rate of the AEB system in the three test scenarios A1, A2, and A3, respectively) in this scenario.
We will now proceed to construct experimental cases and conduct simulations for various real-world scenarios.
3.2.1. A Scenario Construction Test and Analysis
According to Chinese highway standards [
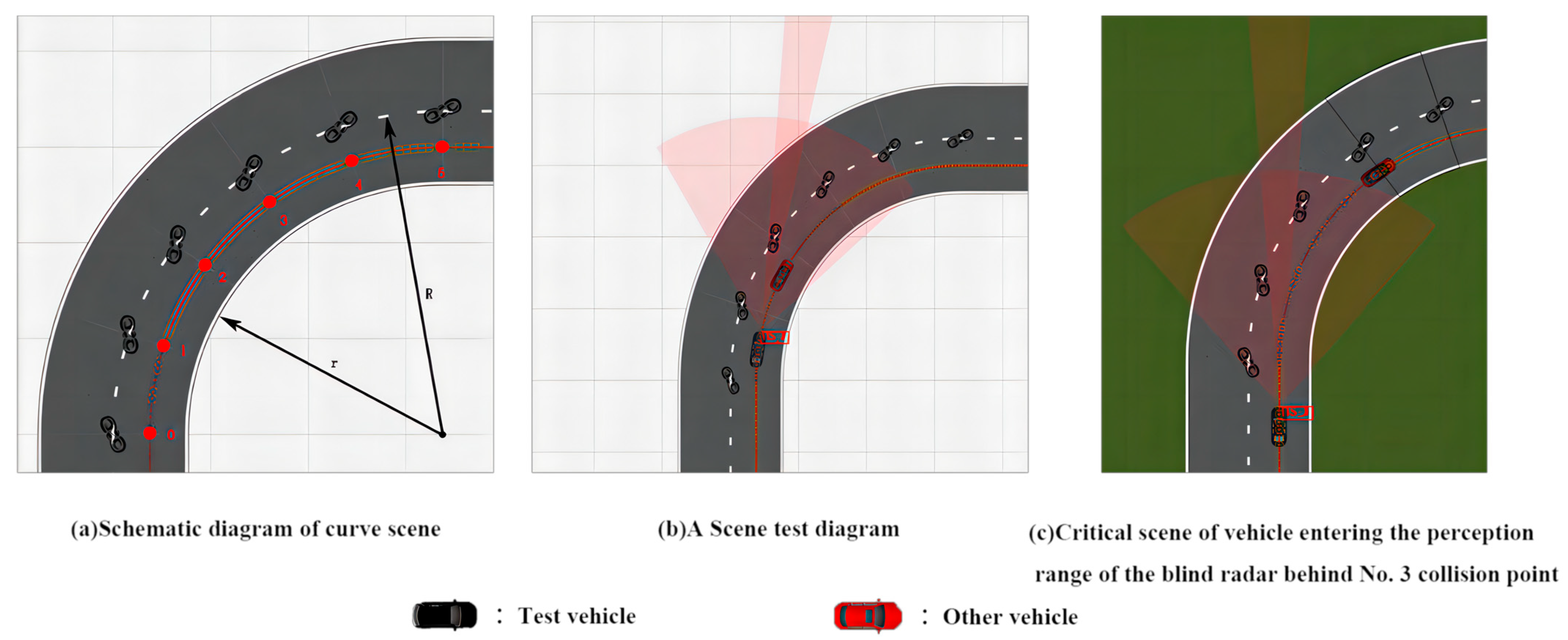
29], the radius of a road is 30 m, and the width of a single lane is 3.75 m. We will construct a one-way two-lane road in PRESCAN, as shown in the
Figure 7, with R = 33.75 m and r = 30 m. We will divide the 90-degree curve into five segments, with each segment having a curvature of 18 degrees, and set collision points 1, 2, 3, 4, and 5.
Concerning the CN-cap testing standard, we will design the experiment and divide the test cases for this scenario into three categories: stationary lead vehicle, slow-moving lead vehicle, and decelerating lead vehicle. To quantitatively describe the performance boundaries of the AEB system in this scenario, we define the maximum ego vehicle speed at which no collision occurs as the collision boundary speed. We will construct test cases for each of the three lead vehicle scenarios: stationary, slow-moving, and decelerating.
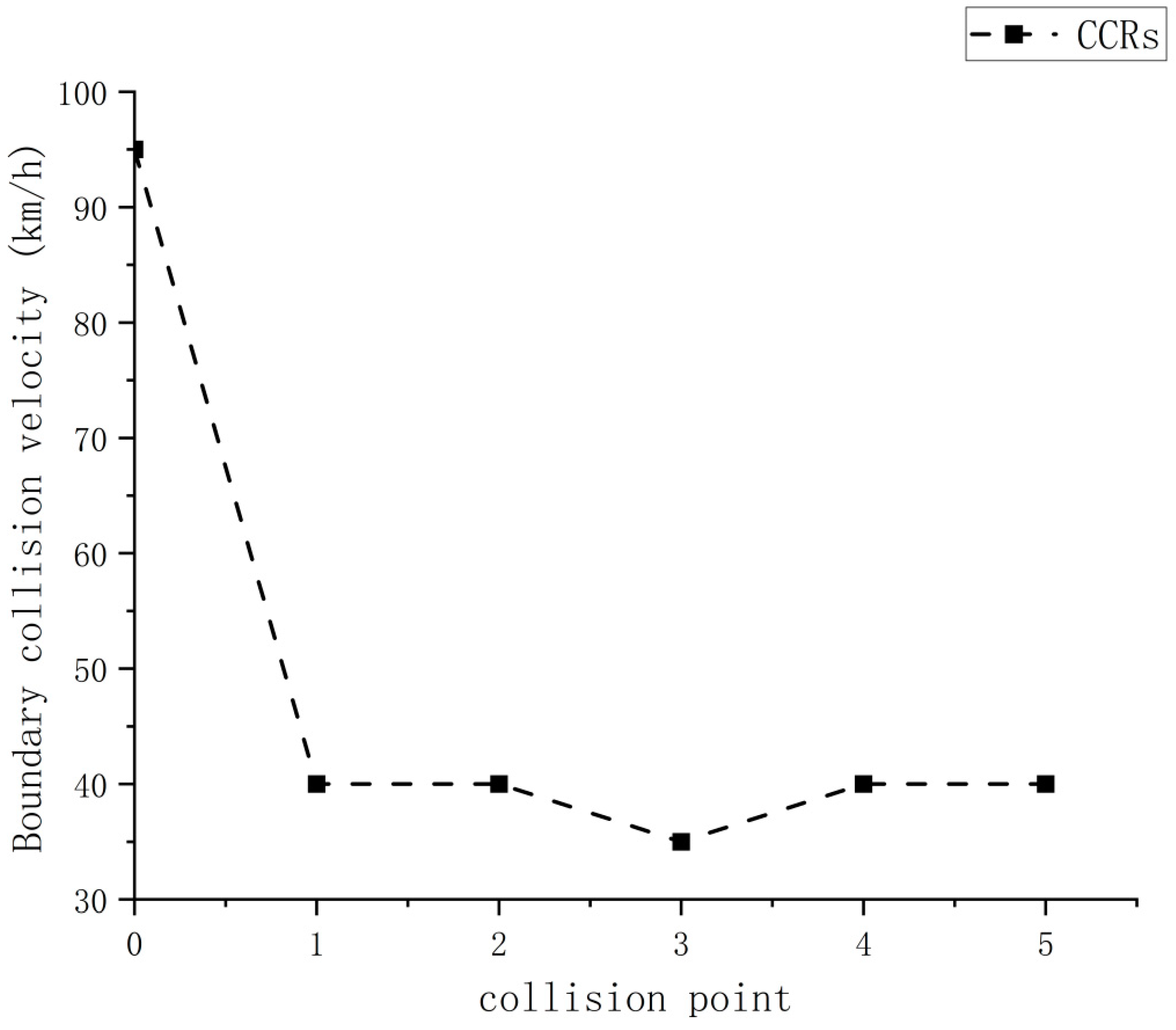
The lead vehicle will be placed at collision points 1 to 5, and the test vehicle will start from a distance of 200 m from the beginning of the curve to realistically simulate actual traffic scenarios. The test will be conducted at speeds increasing in increments of 5 km/h from 5 km/h to 100 km/h. The collision boundary speed when there is no collision at collision point 0 will be used as the reference data for comparison. The experimental results are shown in the table below (
Table 5,
Figure 8):
As shown in
Table 5, the experimental results indicate that the AEB system’s boundary speed is higher at collision point 0 while it is lower at the collision points on the curved road, with the lowest value at collision point 3 at 35 km/h.
- 2.
Slow-moving lead vehicle:
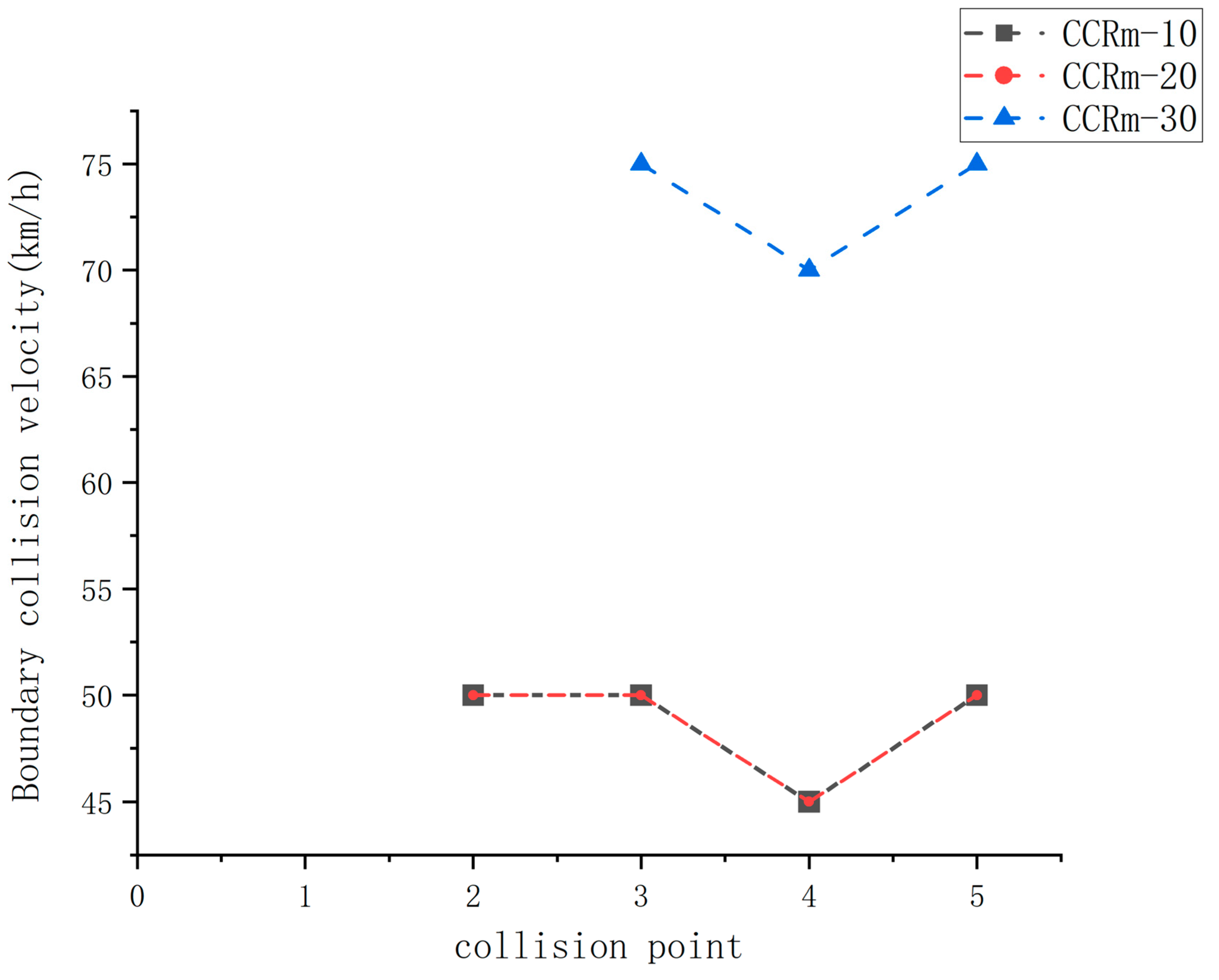
According to Chinese regulations, the speed limit for curved sections of urban roads is 30 km/h. Thus, we will set the lead vehicle’s speed to 10, 20, and 30 km/h, with the starting point at 0. Five collision points will be set at positions 1 to 5 relative to the lead vehicle, and the speed range of the test vehicle will be set to 10–80 km/h. The experimental results are shown in the table below (
Table 6,
Figure 9):
- 3.
Decelerating lead vehicle:
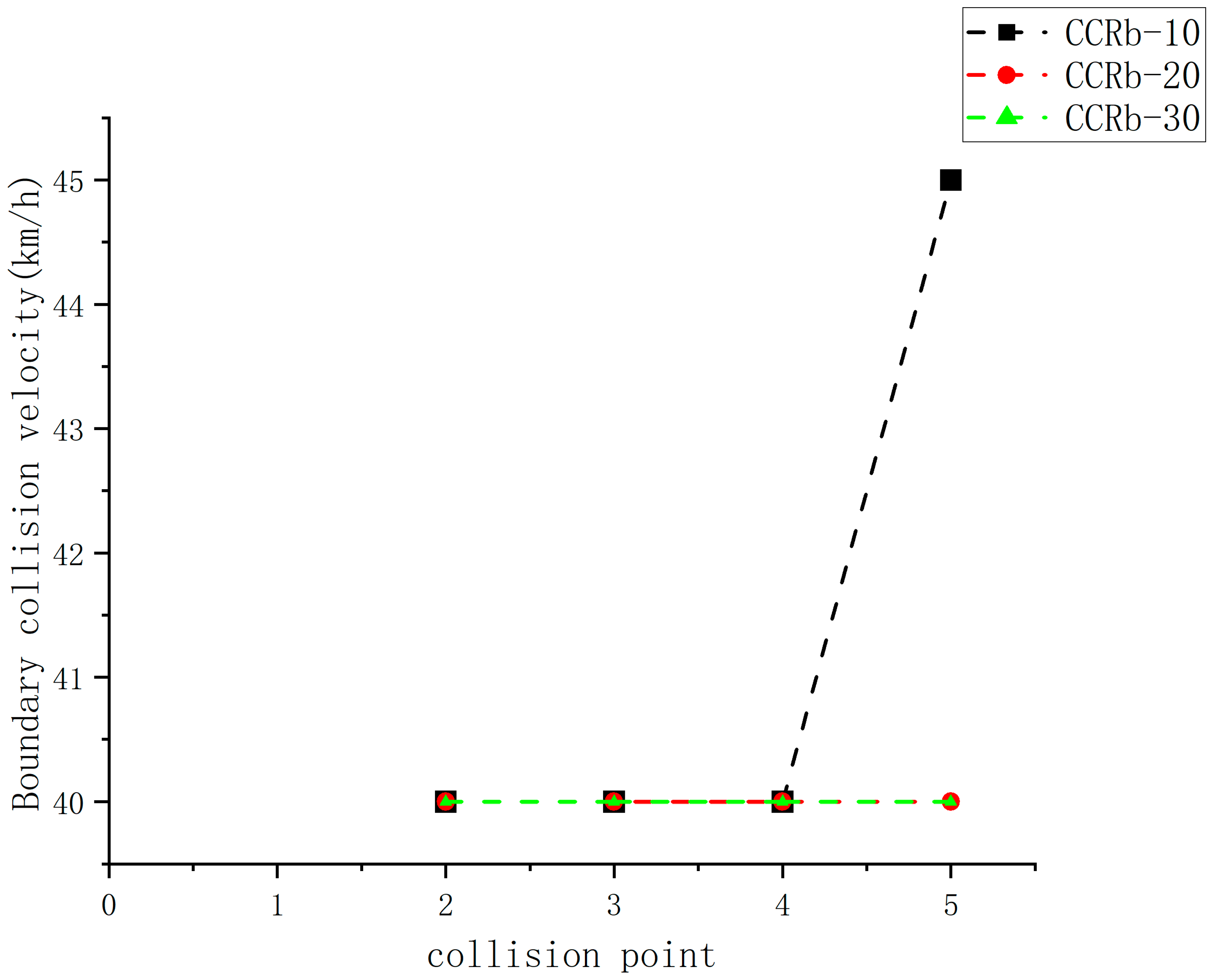
In this scenario, the conditions will be the same as the slow-moving lead vehicle scenario, except that the lead vehicle’s speed will be set to 0 at all collision points. The initial speeds of the lead vehicle will still be set to 10 km/h, 20 km/h, and 30 km/h, respectively, for testing. The experimental results are shown in the table below (
Table 7,
Figure 10):
The statistical representation of test results for scenario A is shown in
Figure 11, for the stationary lead vehicle scenario, collision point 0 is located at the end of the straight road. When driving on a straight road, the AEB system’s boundary collision speed is 95 km/h. After entering the curved road, collision point 3 spends more time in the blind zone of the sensors and can only be sensed by the supplementary radar at the turning point. Therefore, its boundary collision speed initially increases with the turning angle but then begins to decrease again after exiting the curve.
Figure 7c shows a critical scenario where the test vehicle enters the supplementary radar detection range at collision point 3 while the lead vehicle is present.
For the slow-moving lead vehicle scenario, the boundary collision speed for the 10 km/h scenario is 45 km/h, the boundary collision speed for the 20 km/h scenario is 60 km/h, and the boundary collision speed for the 30 km/h scenario is 70 km/h. As the lead vehicle speed increases, the safety boundary of the AEB system also increases.
Since this AEB system is designed based on the TTC (Time-to-Collision) principle, the most important factors affecting the system’s response are the speeds of the lead and test vehicles. Therefore, we can use the difference between the test vehicle’s boundary speed and the lead vehicle’s slow-moving speed to measure the system’s response boundary. Based on safety principles, we will take the minimum value of the five collision points as the boundary collision speed for safety. The safety boundary collision speeds for the 10 km/h, 20 km/h, and 30 km/h scenarios are 35 km/h, 25 km/h, and 40 km/h, respectively. Therefore, the range of the AEB system’s safety boundary collision speed for the curved road in this scenario is 25–40 km/h. Based on safety principles, the maximum safety boundary collision speed for the AEB system in this scenario is the minimum value, which is 25 km/h.
For the decelerating lead vehicle scenario, the boundary collision speeds for the 10 km/h, 20 km/h, and 30 km/h scenarios are 30 km/h, 20 km/h, and 10 km/h, respectively. Based on safety principles, the maximum safety boundary collision speed for the AEB system in this scenario is the minimum value, which is 10 km/h.
The data of each experimental case are summarized in
Table 8.
The data shows that the average performance decay rate of the AEB system in this scenario is 75.44%. The performance decay rate of the AEB system in the decelerating lead vehicle scenario reaches 89.47%. In this situation, the AEB system is essentially ineffective, making this scenario one of the more dangerous scenarios for the AEB system.
3.2.2. B Scenario Construction Test and Analysis
According to Chinese highway standards, the width of a single lane on a highway is 3.75 m. In PRESCAN, a lane can be constructed, as shown in the following diagram (
Figure 12), where 0 is the starting point of the ego vehicle and 1, 2, 3, 4, and 5 are the points where the preceding vehicles stop.
Referring to the CN-CAP testing specifications, the tests can be divided into three categories: preceding vehicle static, preceding vehicle slow, and preceding vehicle deceleration. The distance from the starting point to the traffic light stopping point is 100 m. The starting point for the preceding vehicle is 50 m from the starting point. After testing, it was found that the AEB system did not fail under this scenario.
The AEB system does not fail in this scenario.
3.2.3. C Scenario Construction Test and Analysis
In PRESCAN, a lane can be constructed, as shown in the following diagram (
Figure 13), where 0 is the starting point of the ego vehicle and 1 is a mid-collision point (the left vertex of the obstacle vehicle’s rectangular bounding box), located 150 m from point 0 (at the detection limit of the long-range radar). Using the 5-point method, points 2, 3, 4, and 5 can be set at intervals of 0.9375 m. (In this scenario, the main test is the AEB system response when the future driving trajectory of the test vehicle is partially obscured, so the positions of these five points are tested for complete occlusion and partial occlusion respectively).
Referring to the CN-CAP testing specifications, as the obstacle vehicle is stationary on the roadside in this scenario, the test case is set as preceding vehicle static. The speed range of the ego vehicle is set to 5–80 km/h, and the preceding vehicle is placed at points 1, 2, 3, 4, and 5. Point 1 is the same as in scenario B, where the preceding vehicle is static. Therefore, this scenario mainly evaluates the experimental effect when the obstacle vehicle is offset, i.e., at collision points 2, 3, 4, and 5.
After testing, it was found that the AEB system did not fail in scenario C. The experimental data is shown in
Figure 11. The AEB systems of vehicles at points 2, 3, and 4 completed the processes of warning, partial braking, and full braking, and finally came to a stop. The vehicle at point 5 was not recognized, and the vehicle did not take any action. The collision detection module also did not display a collision.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}