
The Developmentof Software to Automate the Laser Welding of a Liquefied Natural Gas Cargo Tank Using a Mobile Manipulator


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Design of Robotic Laser Welding Process for LNG Cargo
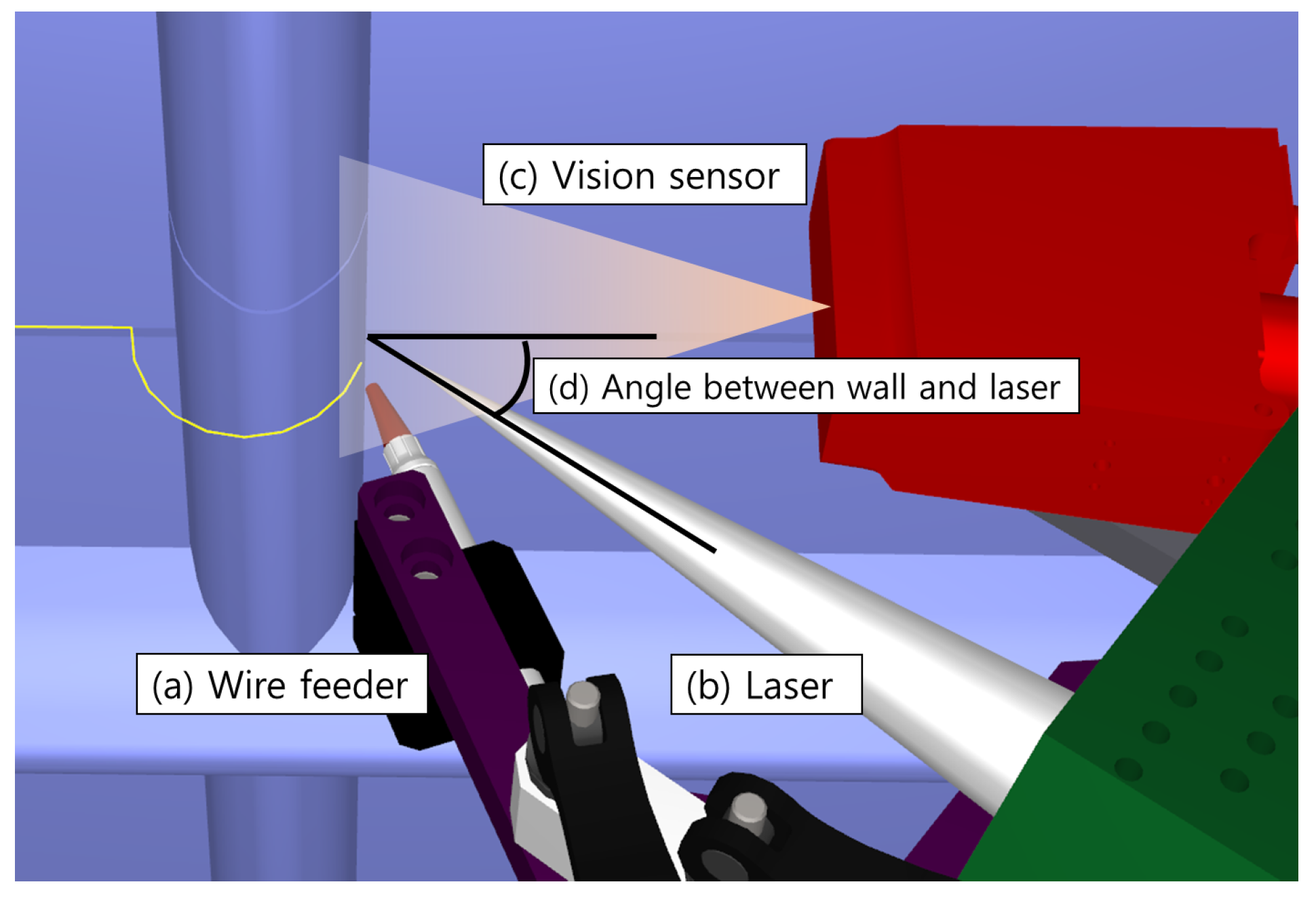
2.1. Mobile Robot Configuration for Laser Welding
2.2. How to Secure the Precision of Mobile Robots
2.3. Overview of LNG Cargo Hold Welding Procedure Using Mobile Robot
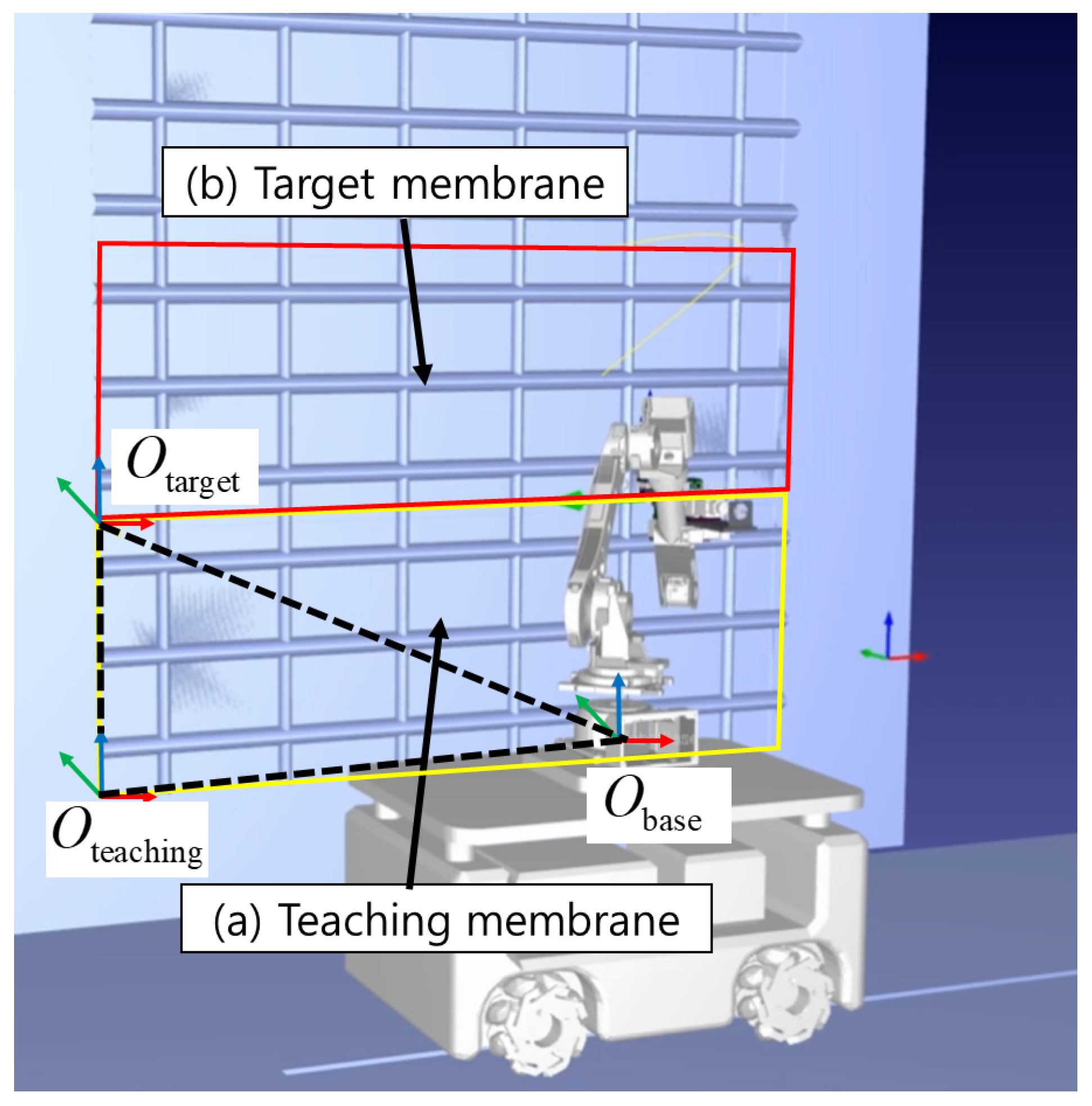
- The mobile robot moved to the initial position of the target layer. To minimize possible positional errors, markers, such as QR codes, were pre-installed on the membrane.
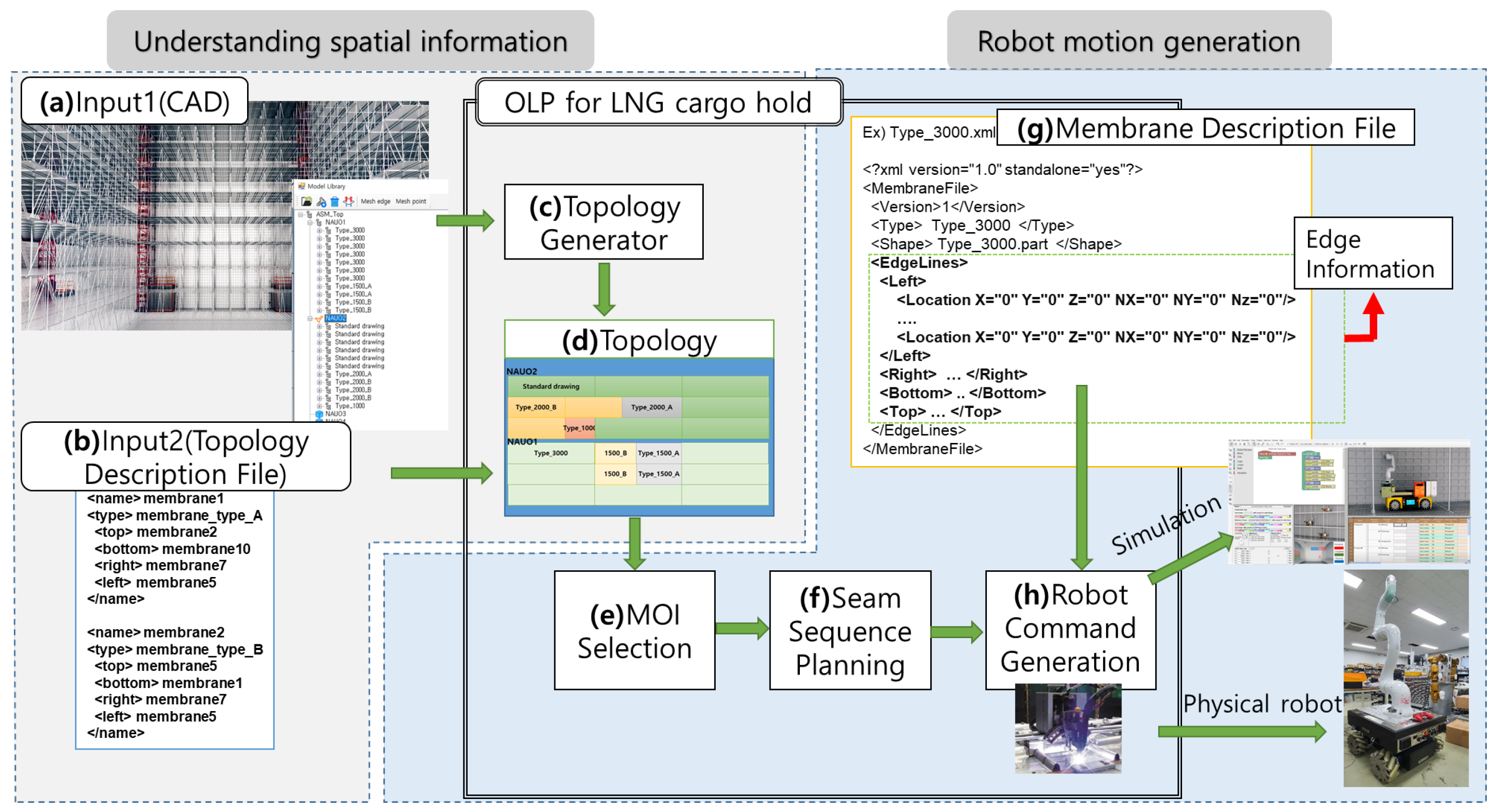
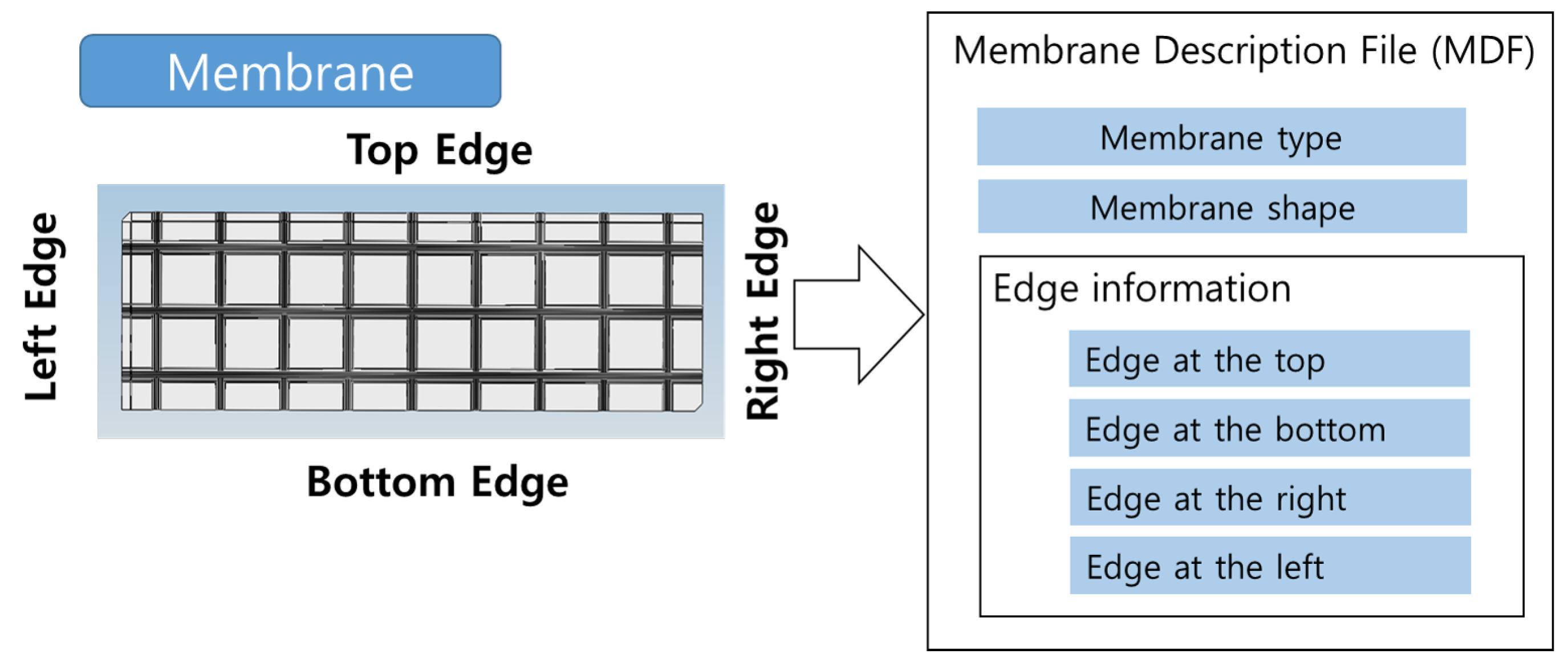
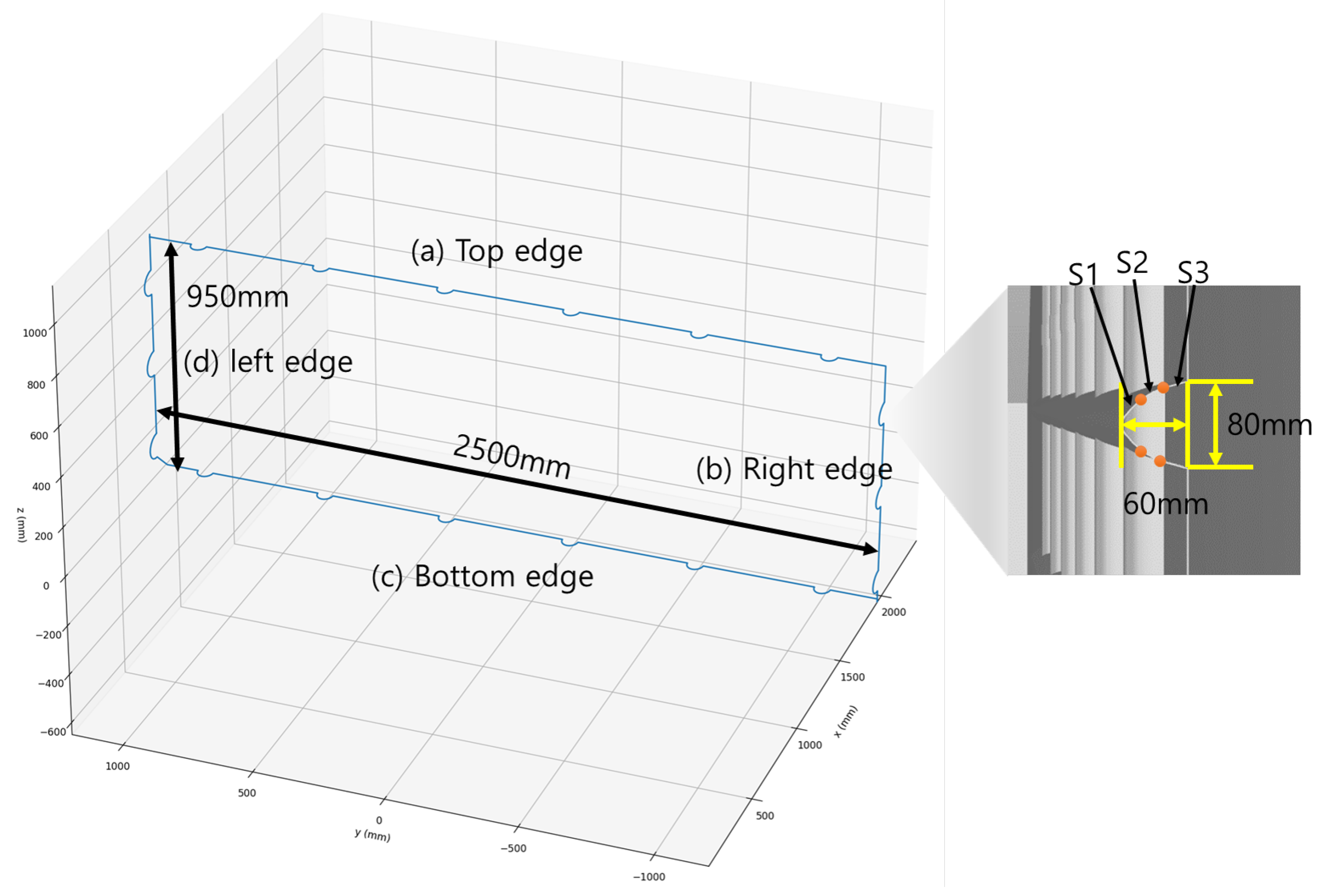
- In a stationary state, the robot identifies weldable seams on the membrane considering the robot’s working area. The pre-installed information about the membrane is stored in a database (DB) format and includes the path information for the left, right, bottom, and top lines of the membrane.
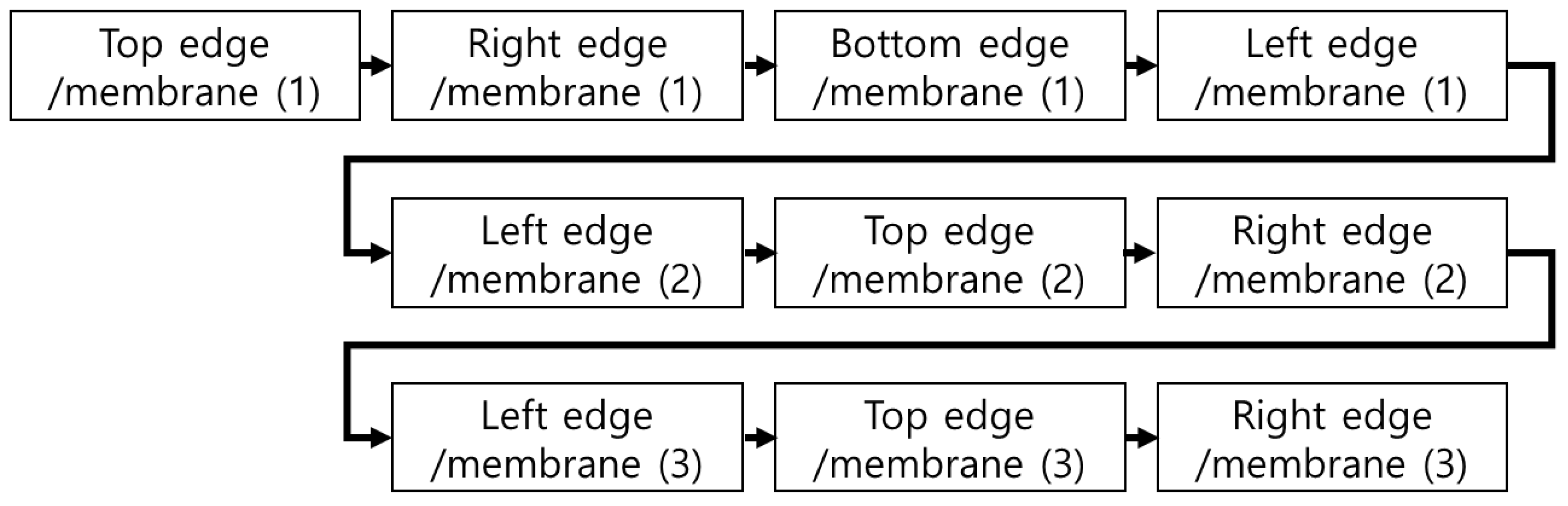
- The welding sequence for the identified weldable seams was determined by considering factors such as overlapping areas between membranes, constraints such as one-time operations considering the characteristics of welding, and other limiting conditions.
- The robot moves to the next pre-planned stopping position, and Steps 2 and 3 are repeated. The stopping positions for the robot movement are preset, considering the robot’s working area and safety margins. Precision markers were installed at stopping positions.
3. Development of a Software for LNG Cargo Welding Automation Using Mobile Robots
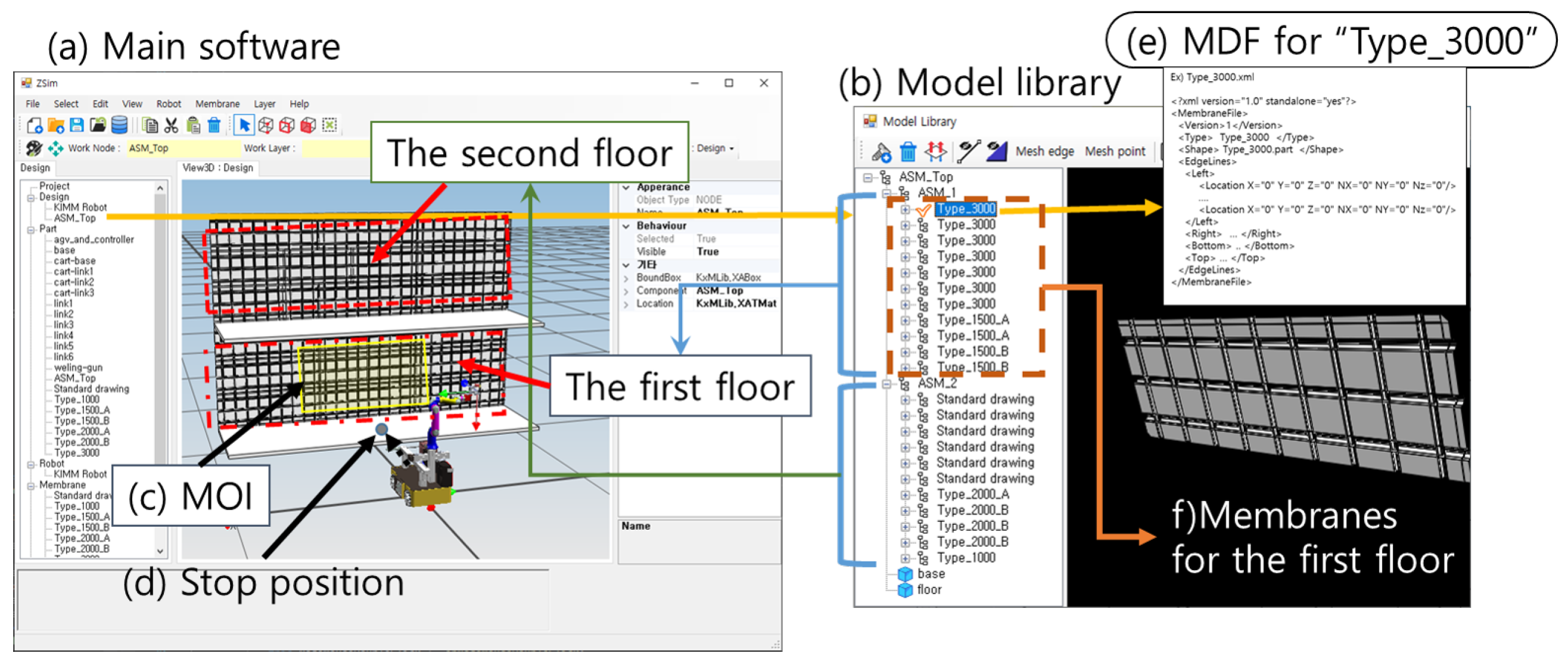
3.1. Fundamental Functions of the Developed Software
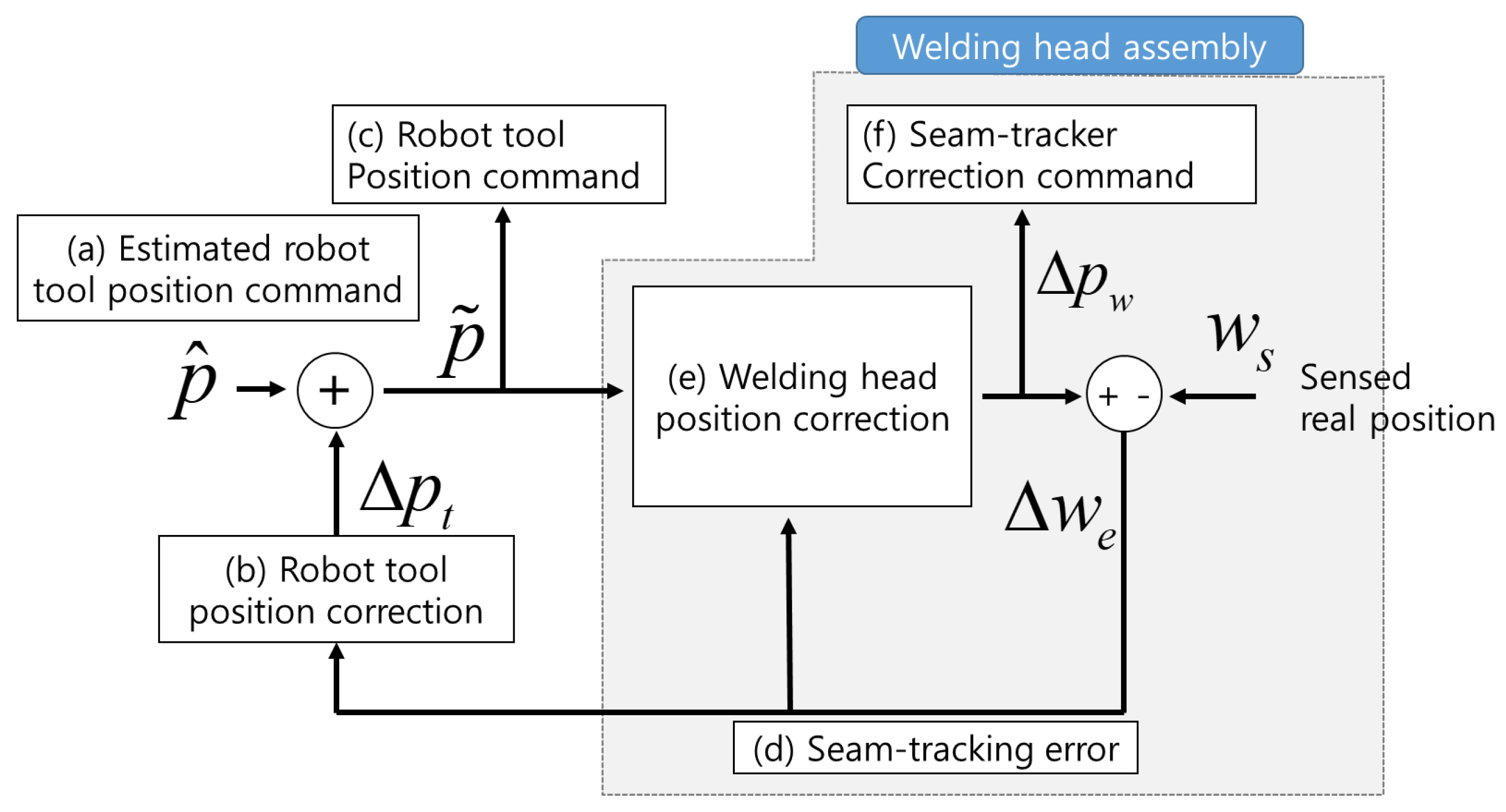
3.2. How to Ensure Seam-Tracking Precision
4. Simulation Studies
4.1. Recognition of Membrane-Based Wall
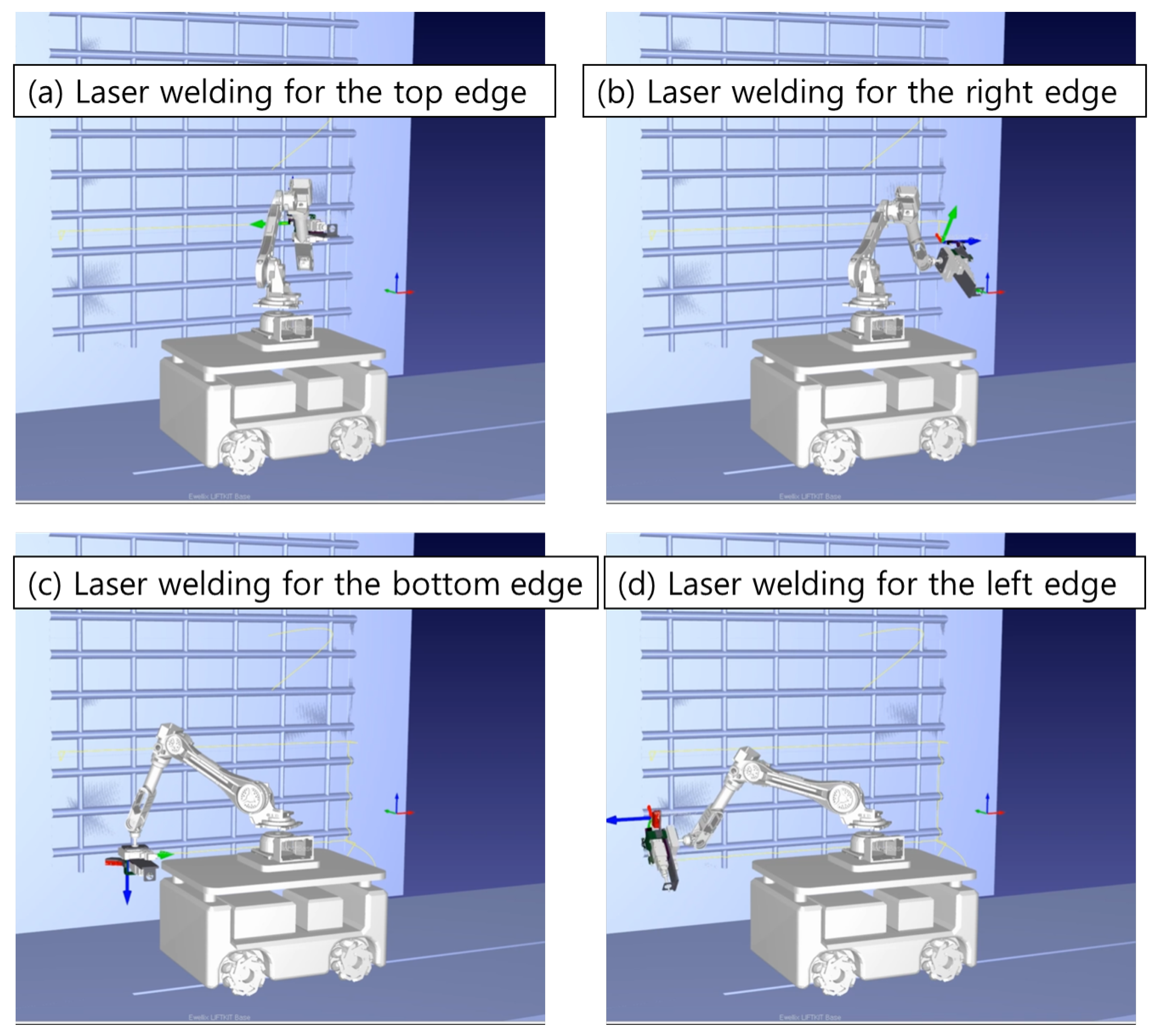
4.2. Robot Motion for Membrane Laser Welding
4.3. Generation of Membrane Weld Path
5. Discussion
5.1. Independence of the Development Program from Actual Robot Behavior
5.2. Space Limitations for Application of Developed Technology to LNG Cargo Holds
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| LNG | Liquefied Natural Gas |
| OLP | Off-Line Programming |
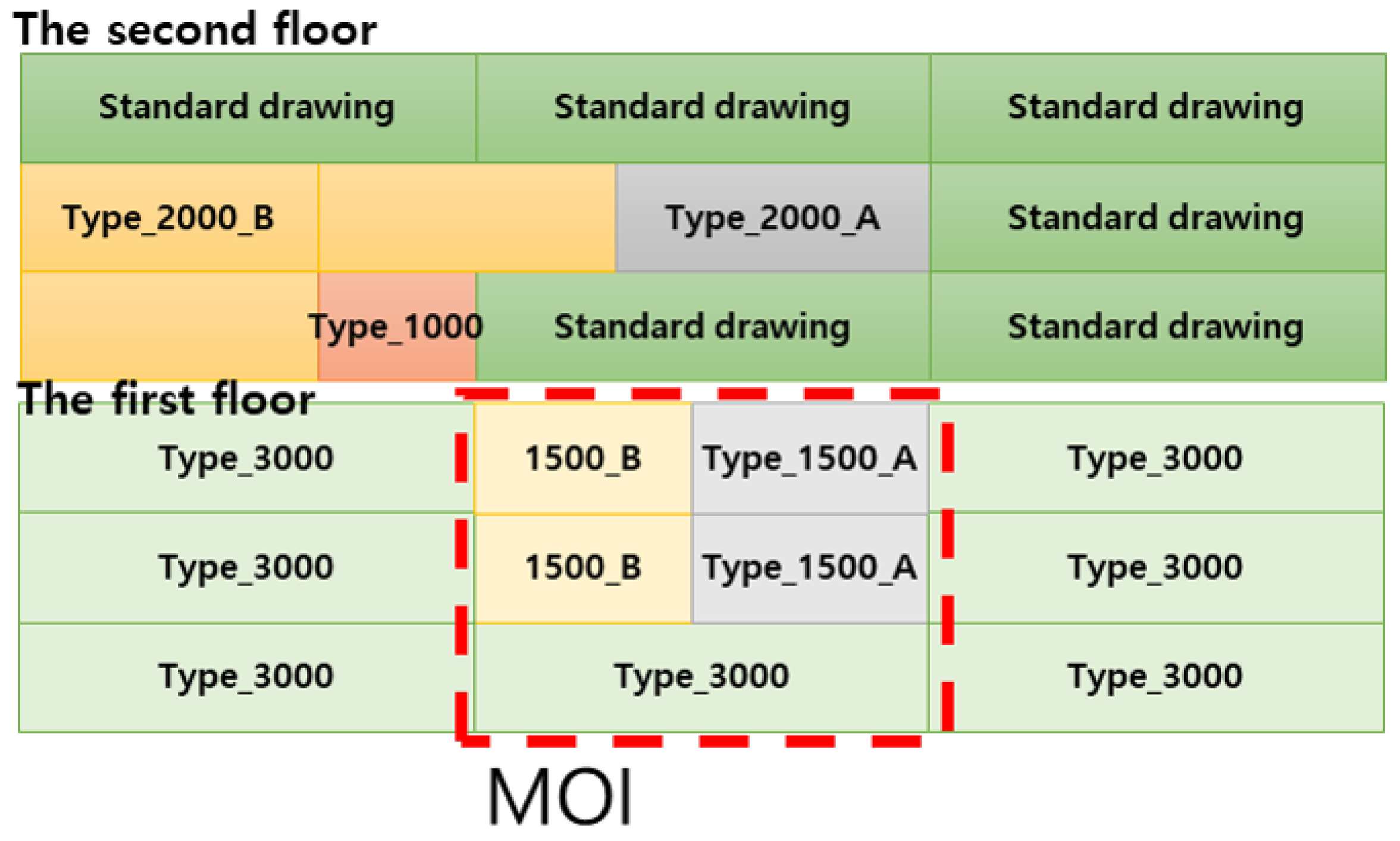
| MOI | Membranes Of Interest |
| TDF | Topology Description File |
| MDF | Membrane Description File |
References
- Erdos, G.; Kardos, C.; Kemény, Z.; Kovács, A.; Váncza, J. Process planning and offline programming for robotic remote laser welding systems. Int. J. Comput. Integr. Manuf. 2016, 29, 1287–1306. [Google Scholar] [CrossRef]
- Polden, J.; Pan, Z.; Larkin, N.; Duin, S.V.; Norrish, J. Offline programming for a complex welding system using DELMIA automation. In Robotic Welding, Intelligence and Automation; Springer: Berlin/Heidelberg, Germany, 2011; pp. 341–349. [Google Scholar]
- Nägele, L.; Macho, M.; Angerer, A.; Hoffmann, A.; Vistein, M.; Schönheits, M.; Reif, W. A backward-oriented approach for offline programming of complex manufacturing tasks. In Proceedings of the 2015 6th International Conference on Automation, Robotics and Applications (ICARA), Queenstown, New Zealand, 17–19 February 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 124–130. [Google Scholar]
- Su, Y.P.; Chen, X.Q.; Zhou, T.; Pretty, C.; Chase, G. Mixed reality-enhanced intuitive teleoperation with hybrid virtual fixtures for intelligent robotic welding. Appl. Sci. 2021, 11, 11280. [Google Scholar] [CrossRef]
- Ciszak, O.; Juszkiewicz, J.; Suszyński, M. Programming of industrial robots using the recognition of geometric signs in flexible welding process. Symmetry 2020, 12, 1429. [Google Scholar] [CrossRef]
- Zhang, G.; Huang, J.; Wu, Y.; Yang, G.; Di, S.; Yuan, H.; Cao, X.; Shin, K. A Novel 3D Complex Welding Seam Tracking Method in Symmetrical Robotic MAG Welding Process Using a Laser Vision Sensing. Symmetry 2023, 15, 1093. [Google Scholar] [CrossRef]
- Xiao, X.; Liu, B.; Warnell, G.; Stone, P. Motion planning and control for mobile robot navigation using machine learning: A survey. Auton. Robot. 2022, 46, 569–597. [Google Scholar] [CrossRef]
- Raj, R.; Kos, A. A comprehensive study of mobile robot: History, developments, applications, and future research perspectives. Appl. Sci. 2022, 12, 6951. [Google Scholar] [CrossRef]
- Popovici, A.T.; Dosoftei, C.C.; Budaciu, C. Kinematics Calibration and Validation Approach Using Indoor Positioning System for an Omnidirectional Mobile Robot. Sensors 2022, 22, 8590. [Google Scholar] [CrossRef] [PubMed]
- Palacín, J.; Bitriá, R.; Rubies, E.; Clotet, E. A Procedure for Taking a Remotely Controlled Elevator with an Autonomous Mobile Robot Based on 2D LIDAR. Sensors 2023, 23, 6089. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Chen, Y.; Lou, Y. A human-aware robotic system for mobile robot navigating in multi-floor building with elevator. In Proceedings of the 2019 WRC Symposium on Advanced Robotics and Automation (WRC SARA), Beijing, China, 21–22 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 178–183. [Google Scholar]
- Kim, J.; Jung, H. Robot Routing Problem of Last-Mile Delivery in Indoor Environments. Appl. Sci. 2022, 12, 9111. [Google Scholar] [CrossRef]
- Servo-Robot. Laser Seam Tracking. 2023. Available online: https://servo-robot.com/laser-seam-tracking/ (accessed on 5 October 2023).
- RoboDK. Offline Programming Software. 2023. Available online: https://robodk.com/simulation (accessed on 4 September 2023).
- Robotmaster. Offline Programming Software for Robots. 2023. Available online: https://www.robotmaster.com/en (accessed on 11 March 2023).





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, T.; Park, J.; Bak, J.; Park, D.; Seo, H.; Kim, S. The Developmentof Software to Automate the Laser Welding of a Liquefied Natural Gas Cargo Tank Using a Mobile Manipulator. Appl. Sci. 2024, 14, 134. https://doi.org/10.3390/app14010134
Choi T, Park J, Bak J, Park D, Seo H, Kim S. The Developmentof Software to Automate the Laser Welding of a Liquefied Natural Gas Cargo Tank Using a Mobile Manipulator. Applied Sciences. 2024; 14(1):134. https://doi.org/10.3390/app14010134
Chicago/Turabian StyleChoi, Taeyong, Jongwoo Park, Jeongae Bak, Dongil Park, Hyunuk Seo, and Sanghyun Kim. 2024. "The Developmentof Software to Automate the Laser Welding of a Liquefied Natural Gas Cargo Tank Using a Mobile Manipulator" Applied Sciences 14, no. 1: 134. https://doi.org/10.3390/app14010134
APA StyleChoi, T., Park, J., Bak, J., Park, D., Seo, H., & Kim, S. (2024). The Developmentof Software to Automate the Laser Welding of a Liquefied Natural Gas Cargo Tank Using a Mobile Manipulator. Applied Sciences, 14(1), 134. https://doi.org/10.3390/app14010134