
Exploiting the Rolling Shutter Read-Out Time for ENF-Based Camera Identification




Abstract
1. Introduction
- We provide a review of ENF extraction from video recordings and the impact of the rolling shutter on ENF extraction.
- We propose a novel ENF-based approach to identify the rolling shutter camera used to capture an ENF-containing video of unknown source.
2. Related Works and Concepts
2.1. ENF Basics
2.2. Overview of ENF Extraction from Video
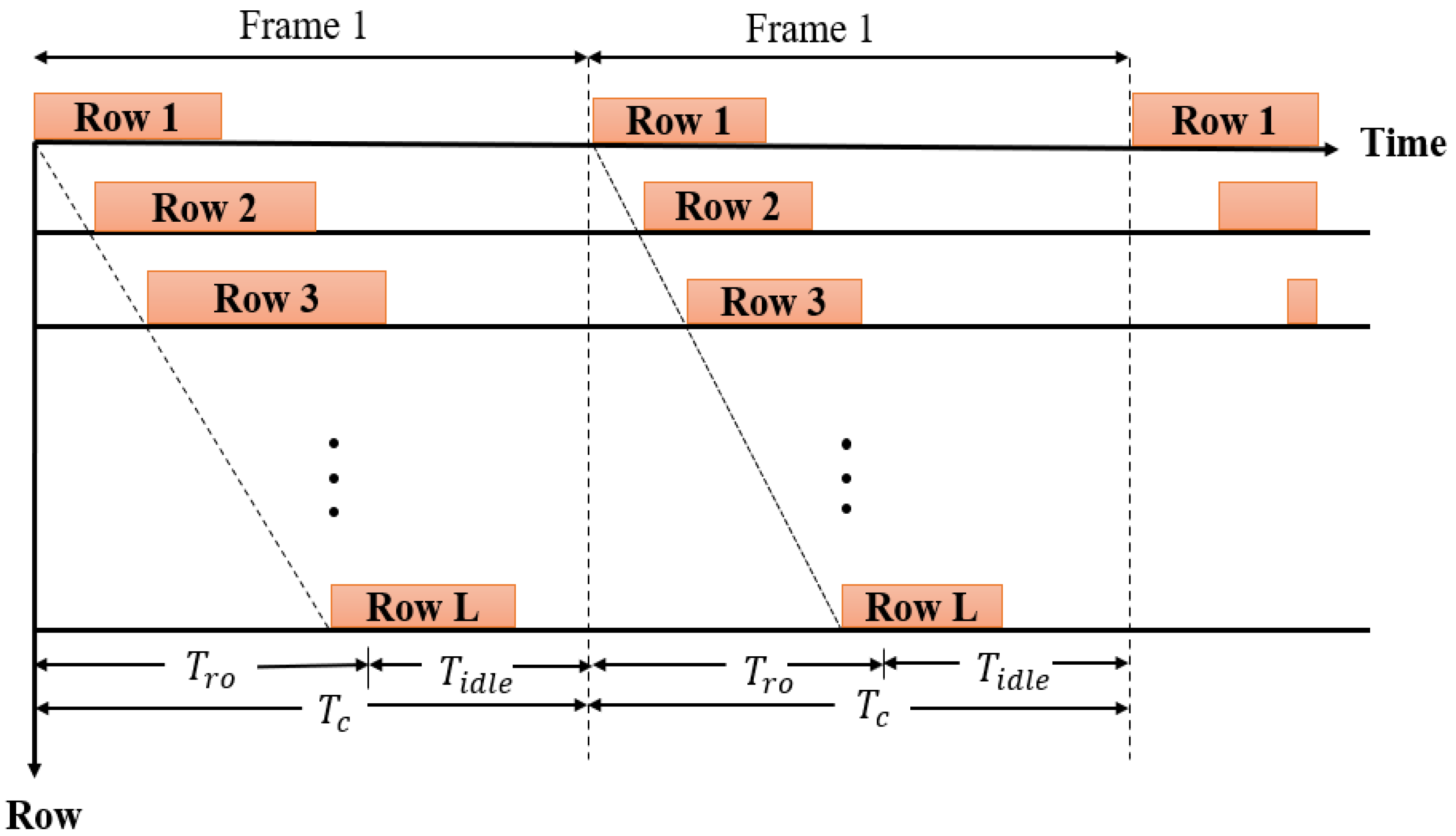
2.3. Rolling Shutter Impact on ENF Extraction
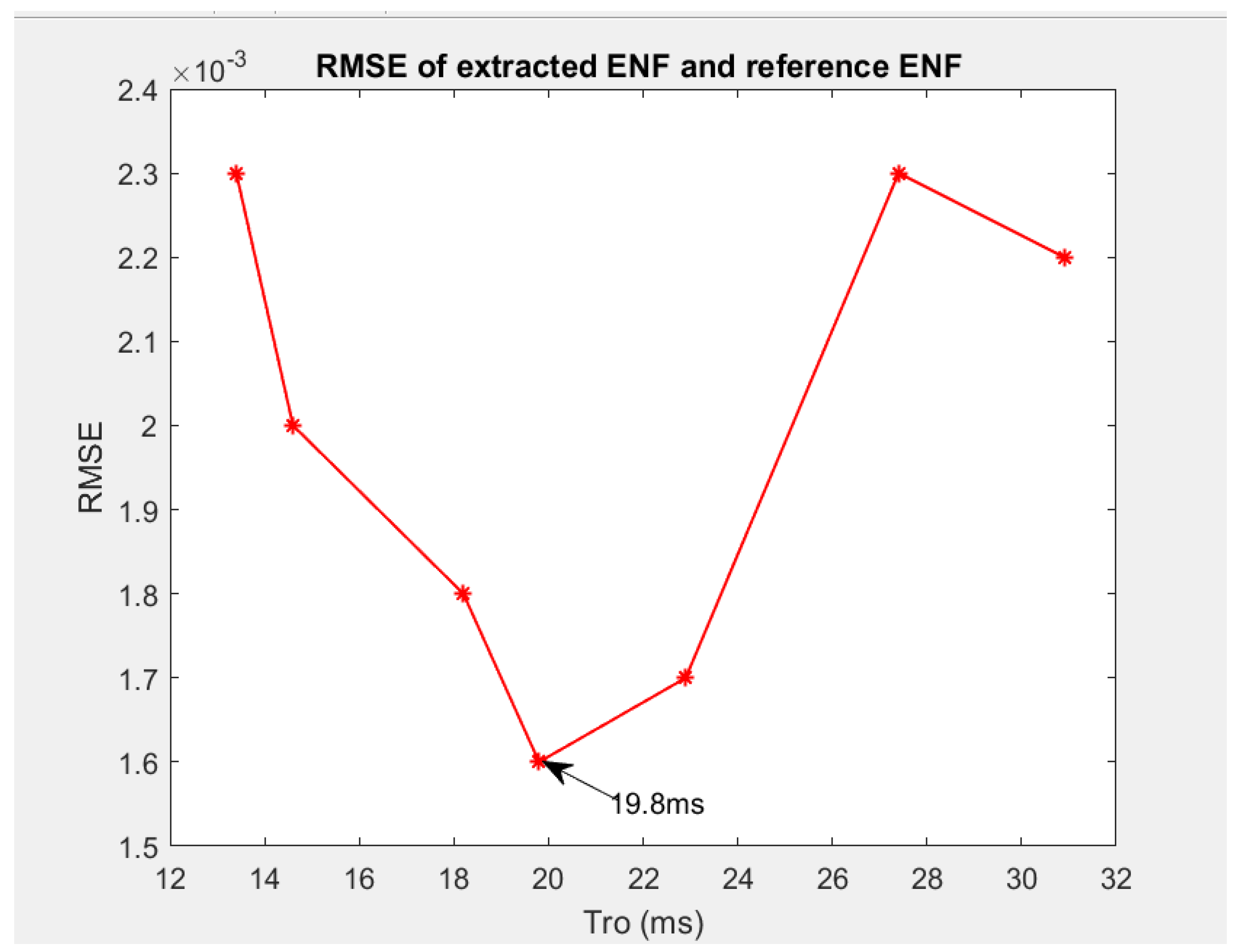
2.4. Camera Read-Out Time () and ENF Estimation
3. Experiment
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Grigoras, C. Applications of ENF criterion in forensic audio, video, computer and telecommunication analysis. Forensic Sci. Int. 2007, 167, 136–145. [Google Scholar] [CrossRef] [PubMed]
- Jeon, Y.; Kim, M.; Kim, H.; Kim, H.; Huh, J.H.; Yoon, J.W. I’m Listening to your Location! Inferring User Location with Acoustic Side Channels. In Proceedings of the 2018 World Wide Web Conference, Geneva, Switzerland, 23–27 April 2018; pp. 339–348. [Google Scholar]
- Rodríguez, D.P.N.; Apolinário, J.A.; Biscainho, L.W.P. Audio authenticity: Detecting ENF discontinuity with high precision phase analysis. IEEE Trans. Inf. Forensics Secur. 2010, 5, 534–543. [Google Scholar] [CrossRef]
- Lin, X.; Kang, X. Supervised audio tampering detection using an autoregressive model. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 2142–2146. [Google Scholar]
- Garg, R.; Varna, A.L.; Hajj-Ahmad, A.; Wu, M. “Seeing” ENF: Power-signature-based timestamp for digital multimedia via optical sensing and signal processing. IEEE Trans. Inf. Forensics Secur. 2013, 8, 1417–1432. [Google Scholar] [CrossRef]
- Sanders, R.W. Digital audio authenticity using the electric network frequency. In Proceedings of the Audio Engineering Society Conference: 33rd International Conference: Audio Forensics-Theory and Practice. Audio Engineering Society, Denvor, CO, USA, 5–7 June 2008. [Google Scholar]
- Grigoras, C. Digital audio recording analysis–the electric network frequency criterion. Int. J. Speech Lang. Law 2005, 12, 63–76. [Google Scholar] [CrossRef]
- Fechner, N.; Kirchner, M. The humming hum: Background noise as a carrier of ENF artifacts in mobile device audio recordings. In Proceedings of the 2014 Eighth International Conference on IT Security Incident Management & IT Forensics, Münster, Germany, 12–14 May 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 3–13. [Google Scholar]
- Bykhovsky, D.; Cohen, A. Electrical network frequency (ENF) maximum-likelihood estimation via a multitone harmonic model. IEEE Trans. Inf. Forensics Secur. 2013, 8, 744–753. [Google Scholar] [CrossRef]
- Hua, G.; Zhang, Y.; Goh, J.; Thing, V.L. Audio authentication by exploring the absolute-error-map of ENF signals. IEEE Trans. Inf. Forensics Secur. 2016, 11, 1003–1016. [Google Scholar] [CrossRef]
- Savari, M.; Wahab, A.W.A.; Anuar, N.B. High-performance combination method of electric network frequency and phase for audio forgery detection in battery-powered devices. Forensic Sci. Int. 2016, 266, 427–439. [Google Scholar] [CrossRef] [PubMed]
- Yao, W.; Zhao, J.; Till, M.J.; You, S.; Liu, Y.; Cui, Y.; Liu, Y. Source location identification of distribution-level electric network frequency signals at multiple geographic scales. IEEE Access 2017, 5, 11166–11175. [Google Scholar] [CrossRef]
- Narkhede, M.; Patole, R. Acoustic scene identification for audio authentication. In Soft Computing and Signal Processing; Wang, J., Reddy, G., Prasad, V., Reddy, V., Eds.; Springer: Singapore, 2019; pp. 593–602. [Google Scholar]
- Zhao, H.; Malik, H. Audio recording location identification using acoustic environment signature. IEEE Trans. Inf. Forensics Secur. 2013, 8, 1746–1759. [Google Scholar] [CrossRef]
- Ohib, R.; Arnob, S.Y.; Arefin, R.; Amin, M.; Reza, T. ENF Based Grid Classification System: Identifying the Region of Origin of Digital Recordings. Criterion 2017, 3, 5. [Google Scholar]
- Despotović, D.; Knežević, M.; Šarić, Ž.; Zrnić, T.; Žunić, A.; Delić, T. Exploring Power Signatures for Location Forensics of Media Recordings. In Proceedings of the IEEE Signal Processing Cup, Shanghai, China, 20–25 March 2016. [Google Scholar]
- Sarkar, M.; Chowdhury, D.; Shahnaz, C.; Fattah, S.A. Application of electrical network frequency of digital recordings for location-stamp verification. Appl. Sci. 2019, 9, 3135. [Google Scholar] [CrossRef]
- El Helou, M.; Turkmani, A.W.; Chanouha, R.; Charbaji, S. ANovel ENF Extraction Approach for Region-of-Recording Verification of Media Recordings. Forensic Sci. Int. 2005, 155, 165. [Google Scholar]
- Zhou, H.; Duanmu, H.; Li, J.; Ma, Y.; Shi, J.; Tan, Z.; Wang, X.; Xiang, L.; Yin, H.; Li, W. Geographic Location Estimation from ENF Signals with High Accuracy. In Proceedings of the IEEE Signal Processing Cup, Shanghai, China, 20–25 March 2016; pp. 1–8. [Google Scholar]
- Hajj-Ahmad, A.; Garg, R.; Wu, M. ENF-based region-of-recording identification for media signals. IEEE Trans. Inf. Forensics Secur. 2015, 10, 1125–1136. [Google Scholar] [CrossRef]
- Hajj-Ahmad, A.; Berkovich, A.; Wu, M. Exploiting power signatures for camera forensics. IEEE Signal Process. Lett. 2016, 23, 713–717. [Google Scholar] [CrossRef]
- Su, H.; Hajj-Ahmad, A.; Wu, M.; Oard, D.W. Exploring the use of ENF for multimedia synchronization. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 4613–4617. [Google Scholar]
- Su, H.; Hajj-Ahmad, A.; Wong, C.W.; Garg, R.; Wu, M. ENF signal induced by power grid: A new modality for video synchronization. In Proceedings of the 2nd ACM International Workshop on Immersive Media Experiences, Orlando, FL, USA, 7 November 2014; pp. 13–18. [Google Scholar]
- Vatansever, S.; Dirik, A.E.; Memon, N. Detecting the presence of ENF signal in digital videos: A superpixel-based approach. IEEE Signal Process. Lett. 2017, 24, 1463–1467. [Google Scholar] [CrossRef]
- Su, H.; Hajj-Ahmad, A.; Garg, R.; Wu, M. Exploiting rolling shutter for ENF signal extraction from video. In Proceedings of the 2014 IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 5367–5371. [Google Scholar]
- Karantaidis, G.; Kotropoulos, C. An Automated Approach for Electric Network Frequency Estimation in Static and Non-Static Digital Video Recordings. J. Imaging 2021, 7, 202. [Google Scholar] [CrossRef] [PubMed]
- Fernández-Menduiña, S.; Pérez-González, F. Temporal localization of non-static digital videos using the electrical network frequency. IEEE Signal Process. Lett. 2020, 27, 745–749. [Google Scholar] [CrossRef]
- Ferrara, P.; Sanchez, I.; Draper-Gil, G.; Junklewitz, H.; Beslay, L. A MUSIC Spectrum Combining Approach for ENF-based Video Timestamping. In Proceedings of the 2021 IEEE International Workshop on Biometrics and Forensics (IWBF), Rome, Italy, 6–7 May 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Choi, J.; Wong, C.W. ENF signal extraction for rolling-shutter videos using periodic zero-padding. In Proceedings of the 2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 2667–2671. [Google Scholar]
- Hajj-Ahmad, A.; Baudry, S.; Chupeau, B.; Doërr, G. Flicker forensics for pirate device identification. In Proceedings of the 3rd ACM Workshop on Information Hiding and Multimedia Security, Portland, OR, USA, 17–19 June 2015; pp. 75–84. [Google Scholar]
- Vatansever, S.; Dirik, A.E.; Memon, N. Analysis of rolling shutter effect on ENF-based video forensics. IEEE Trans. Inf. Forensics Secur. 2019, 14, 2262–2275. [Google Scholar] [CrossRef]
- Gemayel, T.E.; Bouchard, M. A Parametric Autoregressive Model for the Extraction of Electric Network Frequency Fluctuations in Audio Forensic Authentication. J. Energy Power Eng. 2016, 10, 504–512. [Google Scholar] [CrossRef]
- Bollen, M.H.; Gu, I.Y. Signal Processing of Power Quality Disturbances; Mohamed, E.E., Ed.; John Wiley & Sons: New York, NY, USA, 2016. [Google Scholar]
- Haykin, S. Advances in Spectrum Analysis and Array Processing, 3rd ed.; Pentice-Hall, Inc.: Hoboken, NJ, USA, 1995. [Google Scholar]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Smith, J.O.; Serra, X. PARSHL: An analysis/synthesis program for non-harmonic sounds based on a sinusoidal representation. In Proceedings of the 1987 International Computer Music Conference, ICMC, Champaign/Urbana, IL, USA, 23–26 August 1987; pp. 290–297. [Google Scholar]
- Dosiek, L. Extracting electrical network frequency from digital recordings using frequency demodulation. IEEE Signal Process. Lett. 2014, 22, 691–695. [Google Scholar] [CrossRef]
- Hua, G.; Zhang, H. ENF signal enhancement in audio recordings. IEEE Trans. Inf. Forensics Secur. 2019, 15, 1868–1878. [Google Scholar] [CrossRef]
- Vidyamol, K.; George, E.; Jo, J.P. Exploring electric network frequency for joint audio-visual synchronization and multimedia authentication. In Proceedings of the 2017 International Conference on Intelligent Computing, Instrumentation and Control Technologies (ICICICT), Kerala, India, 6–7 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 240–246. [Google Scholar]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Süsstrunk, S. SLIC superpixels compared to state-of-the-art superpixel methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [PubMed]
- Stutz, D.; Hermans, A.; Leibe, B. Superpixels: An evaluation of the state-of-the-art. Comput. Vis. Image Underst. 2018, 166, 1–27. [Google Scholar] [CrossRef]
- Fernández-Menduiña, S.; Pérez-González, F. ENF Moving Video Database. Zenodo 2020. [Google Scholar] [CrossRef]
- Barnich, O.; Van Droogenbroeck, M. ViBe: A universal background subtraction algorithm for video sequences. IEEE Trans. Image Process. 2010, 20, 1709–1724. [Google Scholar] [CrossRef]
- Lindsey, W.C.; Chie, C.M. A survey of digital phase-locked loops. Proc. IEEE 1981, 69, 410–431. [Google Scholar] [CrossRef]
- Hajj-Ahmad, A.; Wong, C.W.; Choi, J.; Wu, M. Power Signature for Multimedia Forensics. In Multimedia Forensics. Advances in Computer Vision and Pattern Recognition; Sencar, H.T., Verdoliva, L., Memon, N., Eds.; Springer: Singapore, 2022; pp. 235–280. [Google Scholar]
- Han, H.; Jeon, Y.; Song, B.K.; Yoon, J.W. A phase-based approach for ENF signal extraction from rolling shutter videos. IEEE Signal Process. Lett. 2022, 29, 1724–1728. [Google Scholar] [CrossRef]
- Choi, J.; Wong, C.W.; Su, H.; Wu, M. Analysis of ENF Signal Extraction from Videos Acquired by Rolling Shutters. 2022. Available online: https://www.techrxiv.org/articles/preprint/Analysis_of_ENF_Signal_Extraction_From_Videos_Acquired_by_Rolling_Shutters/21300960 (accessed on 3 December 2022).
- Liang, C.K.; Chang, L.W.; Chen, H.H. Analysis and compensation of rolling shutter effect. IEEE Trans. Image Process. 2008, 17, 1323–1330. [Google Scholar] [CrossRef]
- Ait-Aider, O.; Bartoli, A.; Andreff, N. Kinematics from lines in a single rolling shutter image. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 1–6. [Google Scholar]
- Gu, J.; Hitomi, Y.; Mitsunaga, T.; Nayar, S. Coded rolling shutter photography: Flexible space-time sampling. In Proceedings of the 2010 IEEE International Conference on Computational Photography (ICCP), Cambridge, MA, USA, 29–30 March 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–8. [Google Scholar]
- Sencar, H.T.; Memon, N. Digital image forensics. In Counter-Forensics: Attacking Image Forensics; Springer: New York, NY, USA, 2013; pp. 327–366. [Google Scholar]
- Shullani, D.; Fontani, M.; Iuliani, M.; Shaya, O.A.; Piva, A. VISION: A video and image dataset for source identification. EURASIP J. Inf. Secur. 2017, 1, 1–16. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera ID | Model | L | (ms) |
|---|---|---|---|
| 1 | iPhone 6s back camera | 480 | 19.8 |
| 2 | Sony Cybershot DSC-RX 100 II | 1080 | 13.4 |
| 3 | iPhone 5 front camera | 720 | 22.9 |
| 4 | iPhone 5 back camera | 1080 | 27.4 |
| 5 | Sony Handycam HDR-TG1 | 1080 | 14.6 |
| 6 | Canon SX230-HS | 240 | 18.2 |
| 7 | iPhone 6 | 1080 | 30.9 |
| Camera Model | (ms) | NCC | RMSE | MAE |
|---|---|---|---|---|
| iPhone 6s back camera | 19.8 | 0.970 | 0.0016 | 0.0012 |
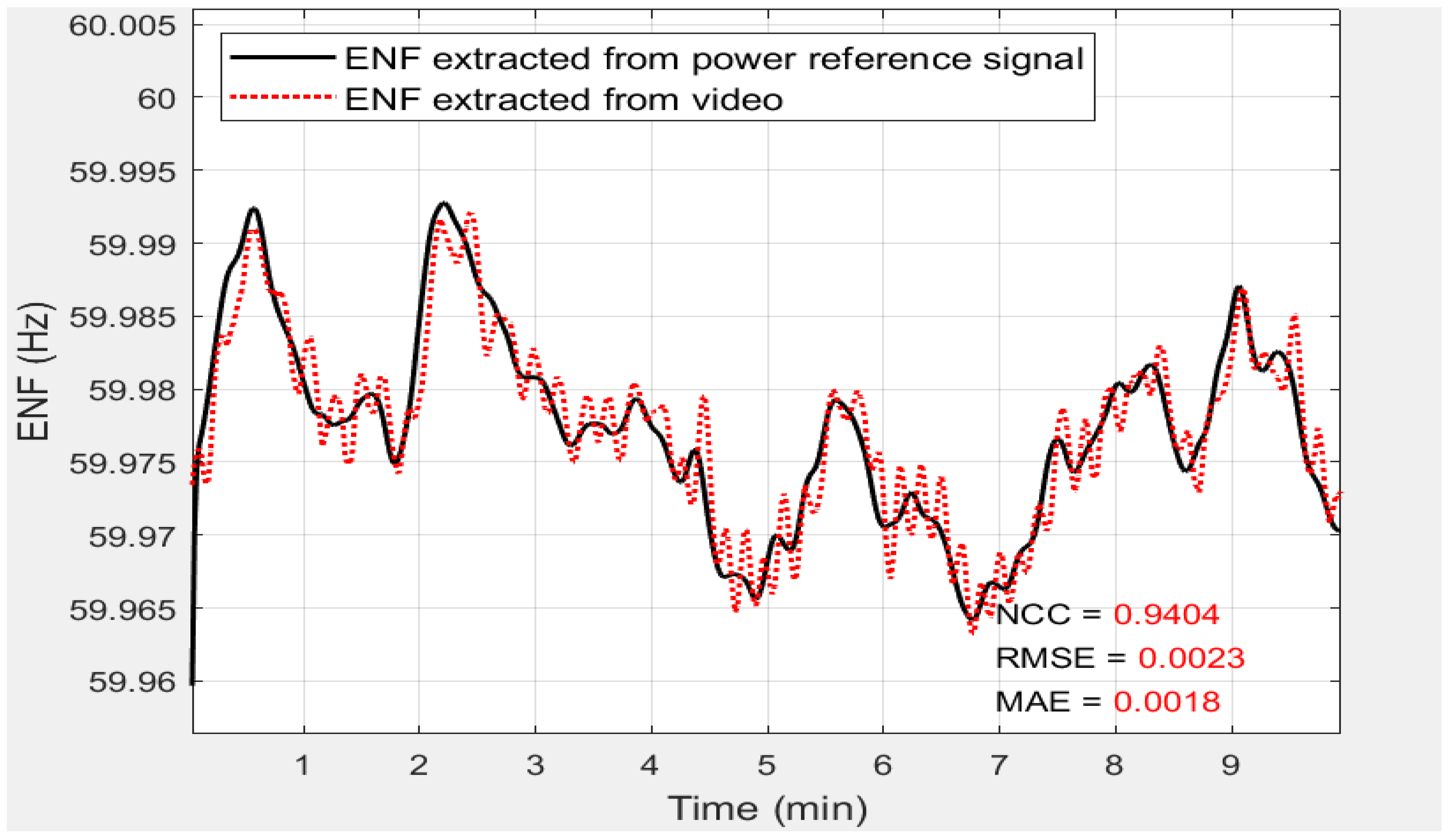
| Sony Cybershot DSC-RX 100 II | 13.4 | 0.940 | 0.0023 | 0.0018 |
| iPhone 5 front camera | 22.9 | 0.961 | 0.0017 | 0.0013 |
| iPhone 5 back camera | 27.4 | 0.934 | 0.0023 | 0.0018 |
| Sony Handycam HDR-TG1 | 14.6 | 0.952 | 0.0020 | 0.0015 |
| Canon SX230-HS | 18.2 | 0.921 | 0.0018 | 0.0014 |
| iPhone 6 | 30.9 | 0.944 | 0.0022 | 0.0016 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ngharamike, E.; Ang, L.-M.; Seng, K.P.; Wang, M. Exploiting the Rolling Shutter Read-Out Time for ENF-Based Camera Identification. Appl. Sci. 2023, 13, 5039. https://doi.org/10.3390/app13085039
Ngharamike E, Ang L-M, Seng KP, Wang M. Exploiting the Rolling Shutter Read-Out Time for ENF-Based Camera Identification. Applied Sciences. 2023; 13(8):5039. https://doi.org/10.3390/app13085039
Chicago/Turabian StyleNgharamike, Ericmoore, Li-Minn Ang, Kah Phooi Seng, and Mingzhong Wang. 2023. "Exploiting the Rolling Shutter Read-Out Time for ENF-Based Camera Identification" Applied Sciences 13, no. 8: 5039. https://doi.org/10.3390/app13085039
APA StyleNgharamike, E., Ang, L.-M., Seng, K. P., & Wang, M. (2023). Exploiting the Rolling Shutter Read-Out Time for ENF-Based Camera Identification. Applied Sciences, 13(8), 5039. https://doi.org/10.3390/app13085039