
Dynamics of a 3-UPS-UPU-S Parallel Mechanism



Abstract
1. Introduction
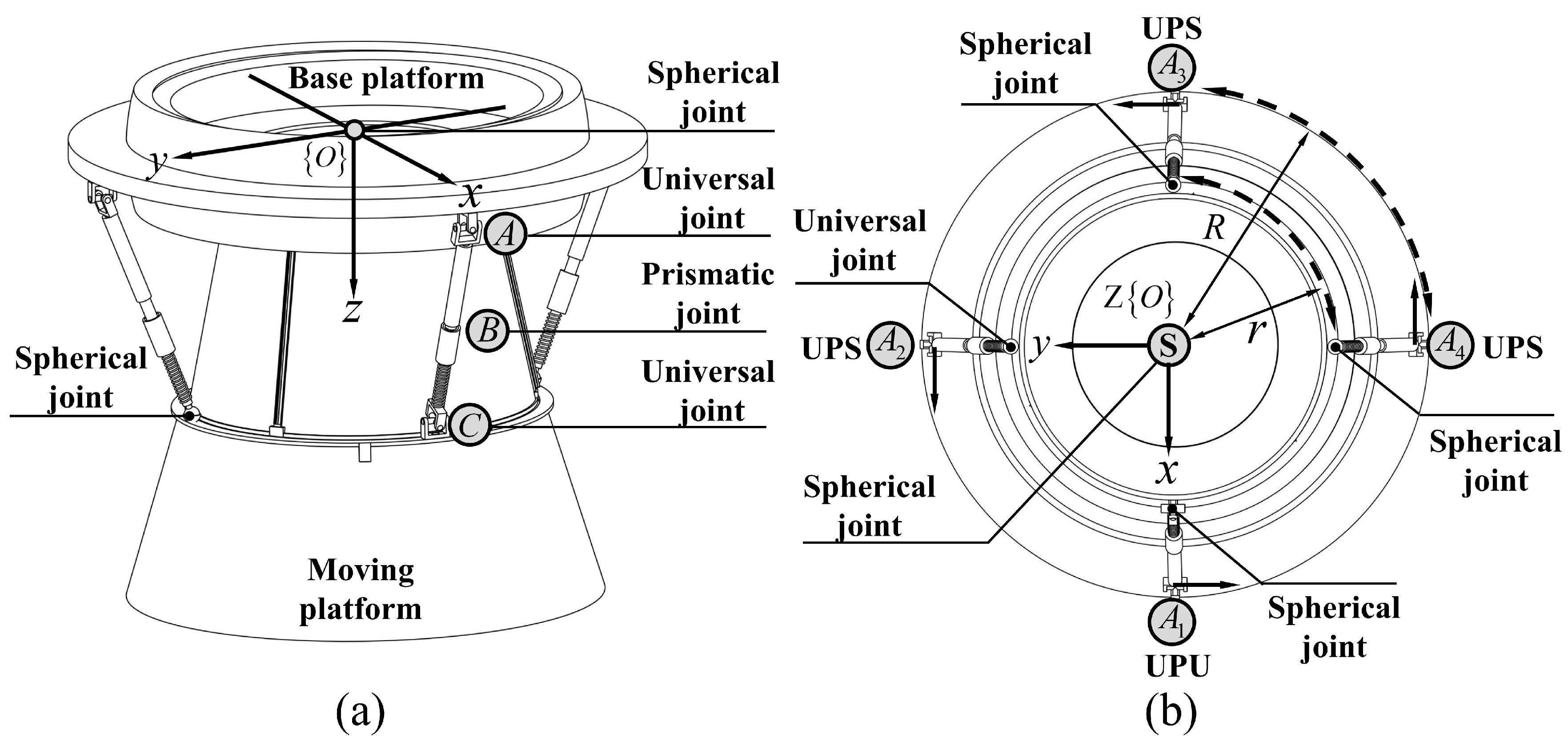
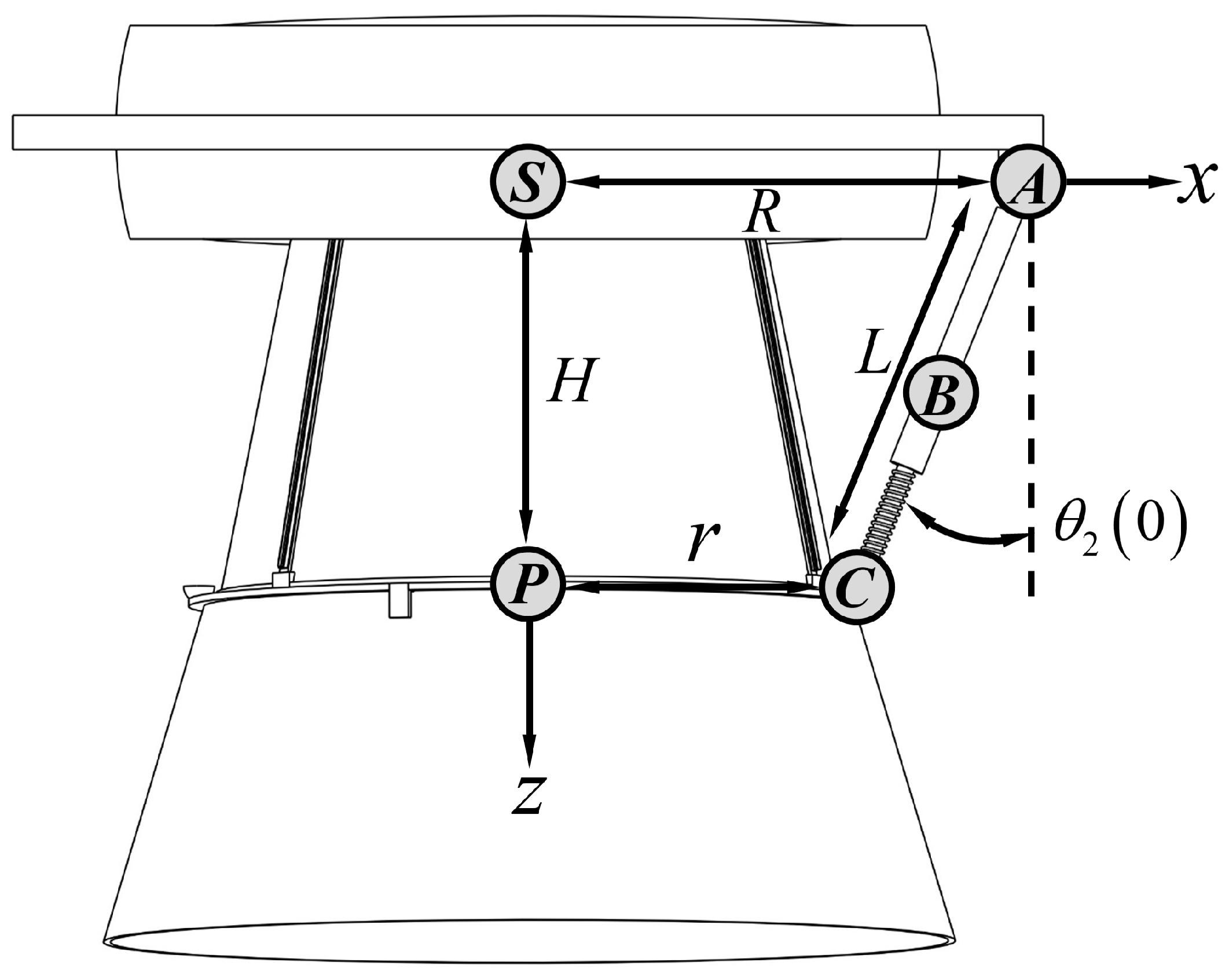
2. A Novel 2-Rotational-DoF Parallel Mechanism () and Its DoF
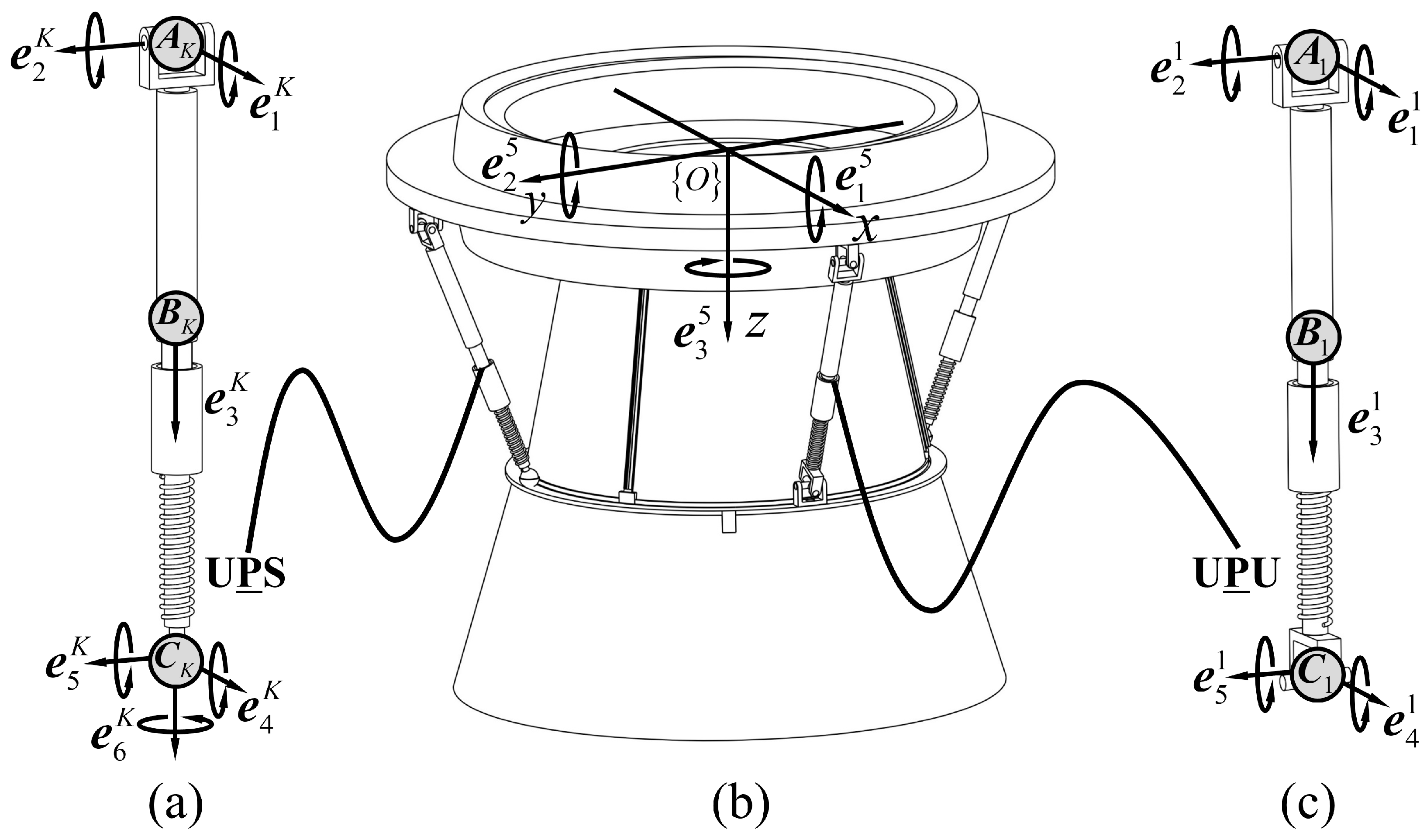
2.1. Fundamentals of Screw Theory
2.2. Reciprocal Screws of Moving Platform and Its DOF
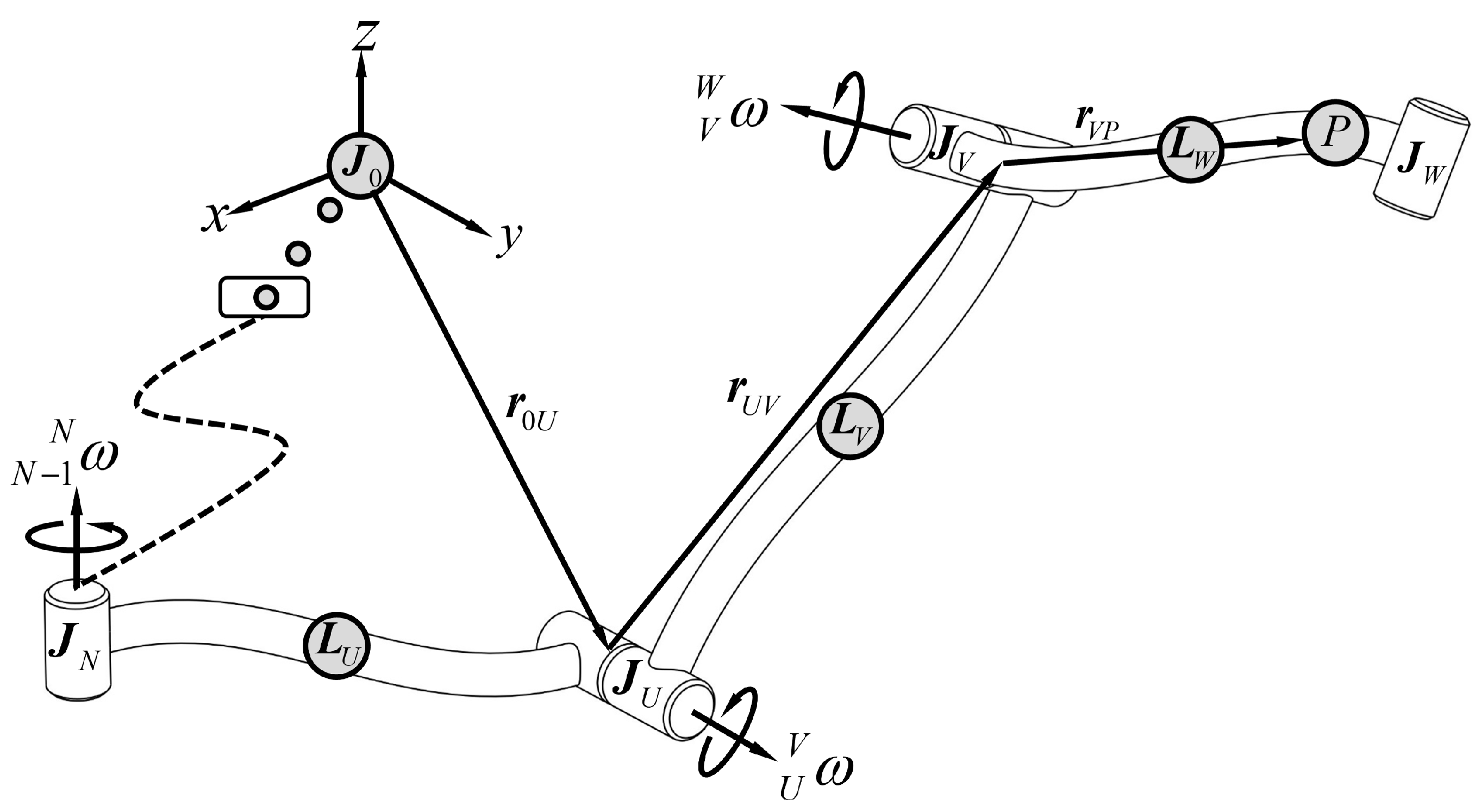
3. The Velocity and Displacement Analysis of the Parallel Mechanism
4. The Analysis of Acceleration and Its Mathematical Expression
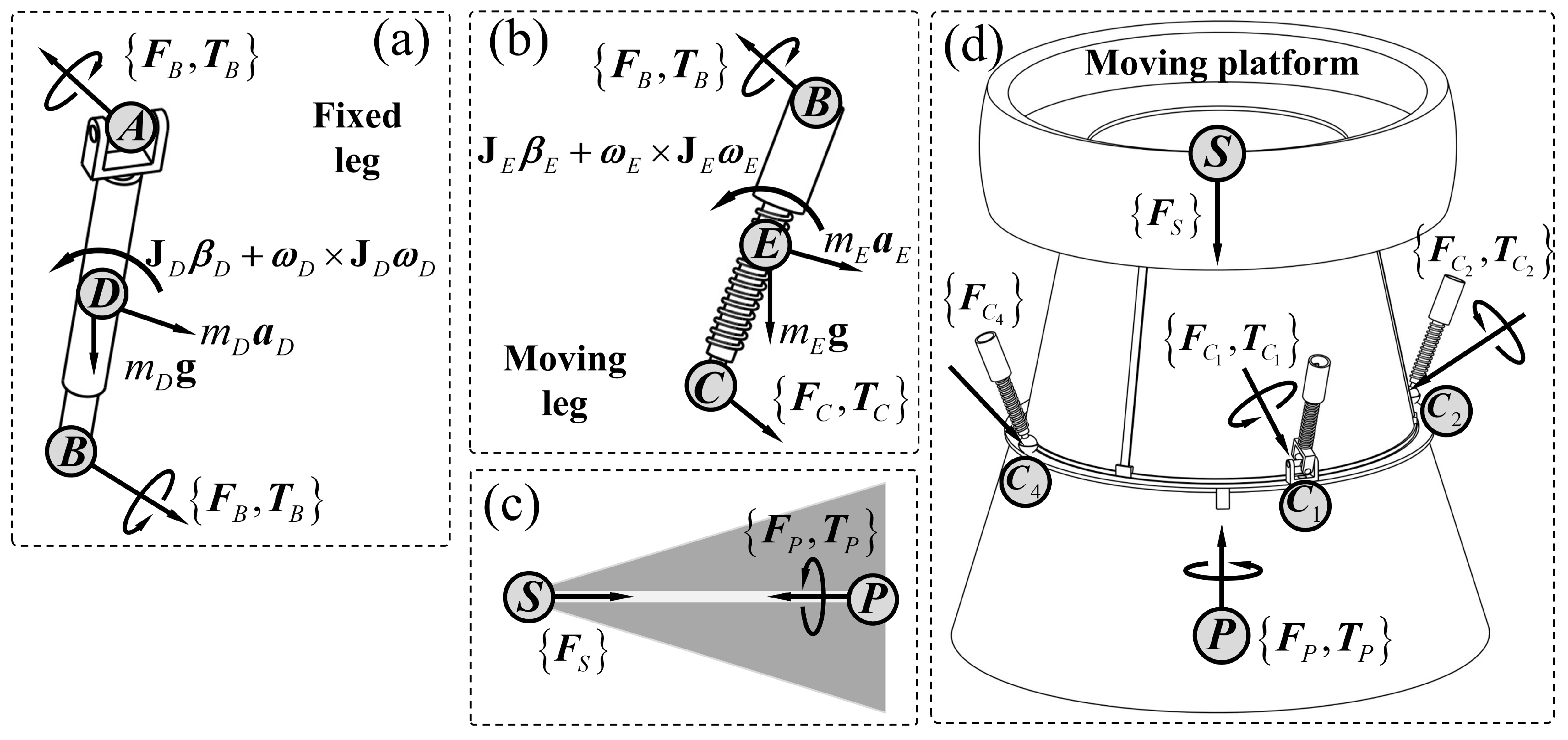
5. The Analysis of Dynamics of the Parallel Mechanism
6. Simulation and Result Analysis
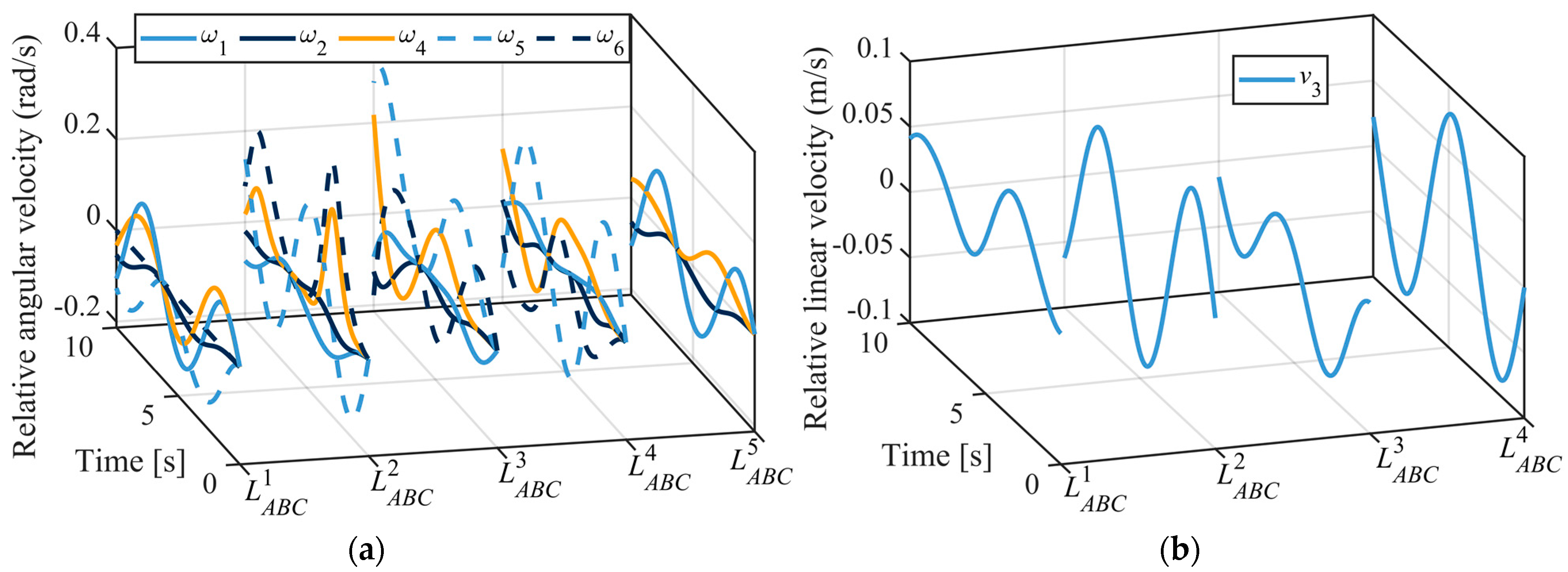
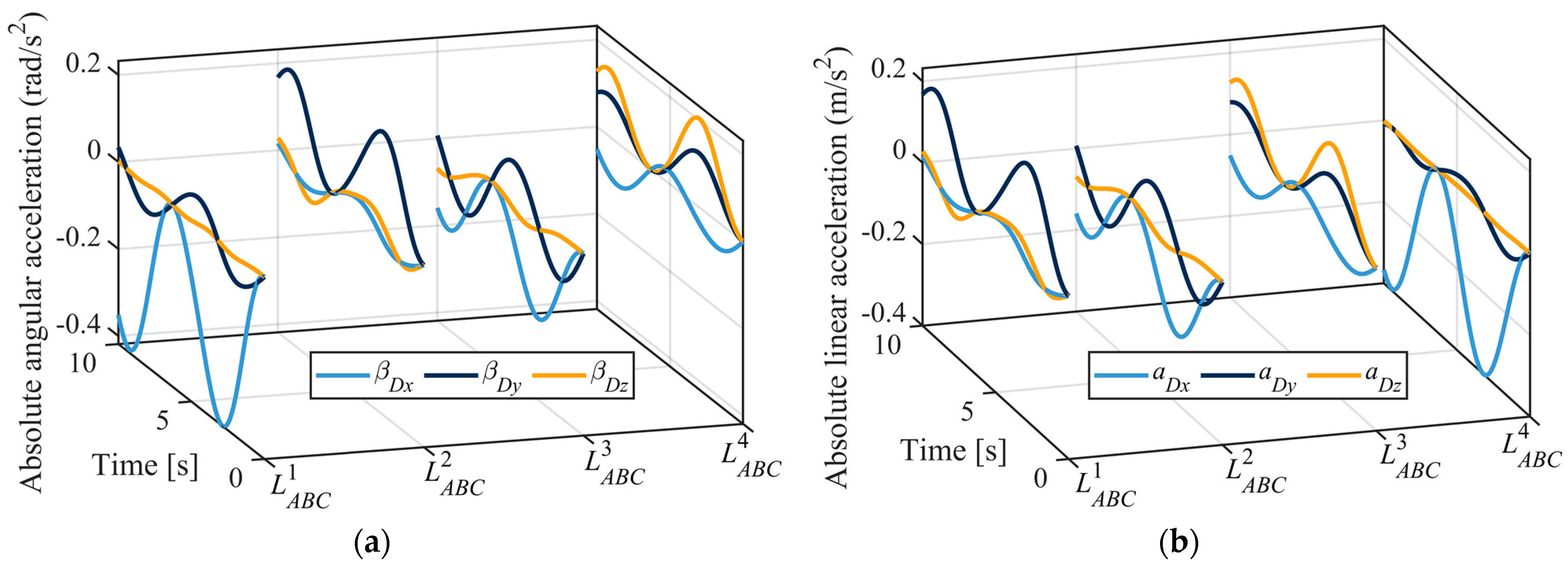
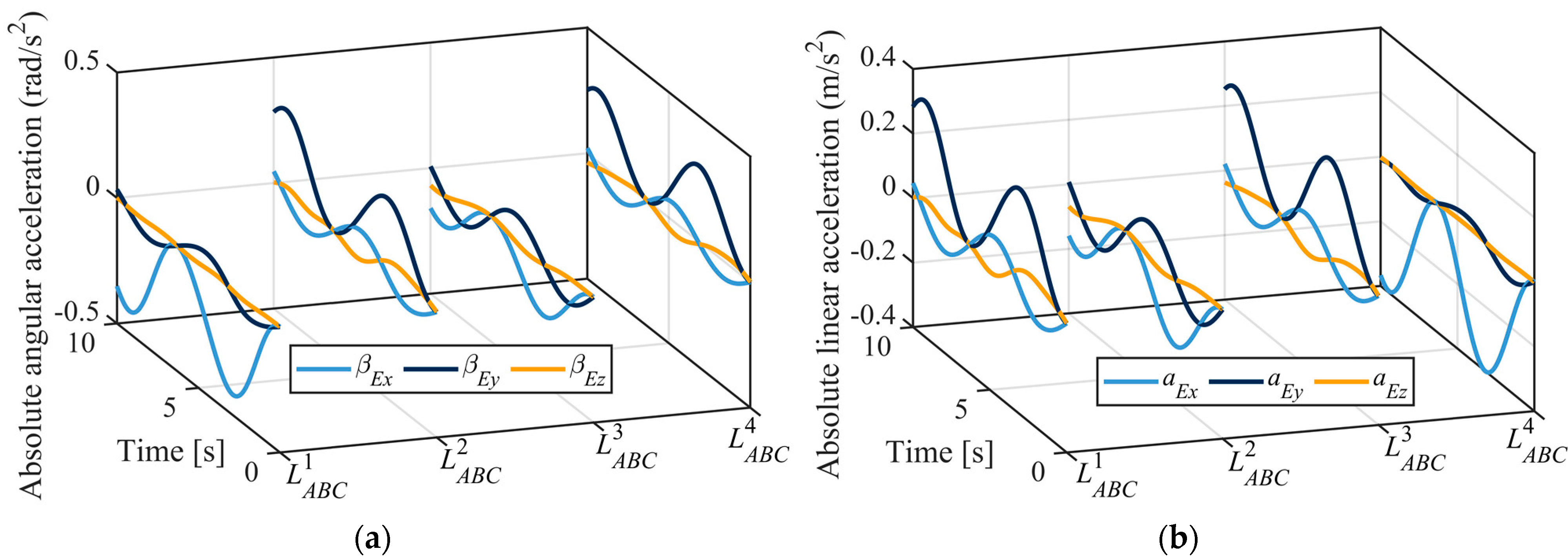
6.1. The Inverse Kinematics of the Parallel Mechanism
6.2. The Inverse Dynamics of the Parallel Mechanism
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Notation | Parameter |
| Acceleration | |
| Linear acceleration | |
| Displacement coefficient matrix | |
| Linear displacement | |
| Displacement | |
| Orientation vector | |
| Force | |
| Initial distance between base platform and middle ring of moving platform | |
| 3rd-order identity matrix | |
| th joint | |
| Moment of inertia of a single-rigid-body in the absolute coordinate frame | |
| Matrix of mass moment of inertia of a single-rigid-body at its principal coordinate frame of the mass center | |
| th kinematic chain in parallel mechanism | |
| Initial length of kinematic chains | |
| th link | |
| Operation of Lie Brackets | |
| Mass matrix | |
| Number of iterations | |
| th joint in one kinematic chain | |
| Wrench vector consisting of constraint forces and torques | |
| Radius of the middle ring of the moving platform | |
| Position vector | |
| Radius of circumcircle of four joints on the base platform | |
| Rotation transformation matrix around axis | |
| Screw matrix | |
| Constraint space | |
| Free motion space | |
| Lie brackets of the unit screws | |
| Inverse screw | |
| Unit screw | |
| Translation in direction | |
| Torque | |
| Linear velocity | |
| Velocity screw | |
| Coriolis wrench matrix | |
| Angular velocity | |
| Angular acceleration | |
| Angular displacement |
References
- Wu, J.; Chen, X.; Wang, L.; Liu, X. Dynamic load-carrying capacity of a novel redundantly actuated parallel conveyor. Nonlinear Dyn. 2014, 78, 241–250. [Google Scholar] [CrossRef]
- Jamwal, P.K.; Xie, S.Q.; Tsoi, Y.H.; Aw, K.C. Forward kinematics modelling of a parallel ankle rehabilitation robot using modified fuzzy inference. Mech. Mach. Theory 2010, 45, 1537–1554. [Google Scholar] [CrossRef]
- Zhao, J.; Zhou, K.; Mao, D.; Gao, Y.; Fang, Y. A new method to study the degree of freedom of spatial parallel mechanisms. Int. J. Adv. Manuf. Technol. 2004, 23, 288–294. [Google Scholar] [CrossRef]
- Zhao, J.; Zhou, K.; Feng, Z. A theory of degrees of freedom for mechanisms. Mech. Mach. Theory 2004, 39, 621–643. [Google Scholar] [CrossRef]
- Kelaiaia, R.; Zaatri, A.; Company, O. Multiobjective Optimization of 6-dof UPS Parallel Manipulators. Adv. Robot. 2012, 26, 1885–1913. [Google Scholar] [CrossRef]
- Peng, B.; Li, Z.; Wu, K.; Sun, Y. Kinematic Characteristics of 3-UPU Parallel Manipulator in Singularity and Its Application. Int. J. Adv. Robot. Syst. 2011, 8, 54–64. [Google Scholar]
- Lazic, D.V.; Ristanovic, M.R. Electrohydraulic thrust vector control of twin rocket engines with position feedback via angular transducers. Control. Eng. Pract. 2007, 15, 583–594. [Google Scholar] [CrossRef]
- Rosyid, A.; El-Khasawneh, B. Multibody Dynamics of Nonsymmetric Planar 3PRR Parallel Manipulator with Fully Flexible Links. Appl. Sci. 2020, 10, 4816. [Google Scholar] [CrossRef]
- Brahmia, A.; Kelaiaia, R.; Chemori, A.; Company, O. On Robust Mechanical Design of PAR2 Delta-Like Parallel Kinematic Manipulator. J. Mech. Robot. 2022, 14, 011001. [Google Scholar] [CrossRef]
- Gallardo-Alvarado, J.; Aguilar-Nájera, C.R.; Casique-Rosas, L.; Pérez-González, L.; Rico-Martínez, J.M. Solving the kinematics and dynamics of a modular spatial hyper-redundant manipulator by means of Plücker coordinate. Multibody Syst. Dyn. 2008, 20, 307–325. [Google Scholar] [CrossRef]
- Gan, D.; Liao, Q.; Wang, P. Forward Kinematics Analysis and Motion Simulation of a New 6-CCS Parallel Mechanism. China Mech. Eng. 2007, 18, 2903–2906. [Google Scholar]
- Shao, B.; Yuan, E. An United Recursive Robot Dynamics Based on Screws. AASRI Procedia 2012, 3, 54–59. [Google Scholar] [CrossRef]
- Nurahmi, L.; Gan, D. Dynamic Analysis of the 3-RRPS Metamorphic Parallel Mechanism Based on Instantaneous Screw Axis. In Proceedings of the ASME 2019 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, 2019, 5A: 43rd Mechanisms and Robotics Conference, Anaheim, CA, USA, 18–21 August 2019. [Google Scholar]
- Cardozo, W.S.; Weber, H.I. Dynamic modeling of a 2-dof parallel electrohydraulic-actuated homokinetic platform. Mech. Mach. Theory 2017, 118, 1–13. [Google Scholar] [CrossRef]
- Dasgupta, B.; Choudhury, P. A general strategy based on the Newton-Euler approach for the dynamic formulation of parallel manipulators. Mech. Mach. Theory 1999, 34, 801–824. [Google Scholar] [CrossRef]
- Chen, X.; Wu, L.; Deng, Y.; Wang, Q. Dynamic response analysis and chaos identification of 4-UPS-UPU flexible spatial parallel mechanism. Nonlinear Dyn. 2017, 87, 2311–2324. [Google Scholar] [CrossRef]
- Abdellatif, H.; Heimann, B. Computational efficient inverse dynamics of 6-DoF fully parallel manipulators by using the Lagrangian formalism. Mech. Mach. Theory 2009, 44, 192–207. [Google Scholar] [CrossRef]
- Liu, S.; Peng, G.; Gao, H. Dynamic modeling and terminal sliding mode control of a 3-DoF redundantly actuated parallel platform. Mechatronics 2019, 60, 26–33. [Google Scholar] [CrossRef]
- Chen, M.; Zhang, Q.; Qin, X.; Sun, Y. Kinematic, dynamic, and performance analysis of a new 3-DoF over-constrained parallel mechanism without parasitic motion. Mech. Mach. Theory 2021, 162, 104365. [Google Scholar] [CrossRef]
- Merlet, J.P.; Gosselin, C. Parallel Mechanisms and Robots; Springer Handbook of Robotics: Berlin/Heidelberg, Germany, 2008; pp. 269–285. [Google Scholar]
- Ren, J.; Cao, Q. Dynamic Modeling and Frequency Characteristic Analysis of a Novel 3-PSS Flexible Parallel Micro-Manipulator. Micromachines 2021, 12, 678. [Google Scholar] [CrossRef]
- Ren, J.; Li, Q.; Wu, H.; Cao, Q. Optimal Design for 3-PSS Flexible Parallel Micromanipulator Based on Kinematic and Dynamic Characteristics. Micromachines 2022, 13, 1457. [Google Scholar] [CrossRef]
- Rosyid, A.; El-Khasawneh, B. Identification of the Dynamic Parameters of a Parallel Kinematics Mechanism with Prismatic Joints by Considering Varying Friction. Appl. Sci. 2020, 10, 4820. [Google Scholar] [CrossRef]
- Hu, B.; Yu, J.; Lu, Y. Inverse dynamics modeling of a (3-UPU) (3-UPS S) serial-parallel manipulator. Robotica 2016, 34, 687–702. [Google Scholar] [CrossRef]
- Niu, A.; Wang, S.; Sun, Y.; Qiu, J.; Qiu, W.; Chen, H. Dynamic modeling and analysis of a novel offshore gangway with 3UPU/UP-RRP series-parallel hybrid structure. Ocean. Eng. 2022, 266, 113122. [Google Scholar] [CrossRef]
- Safeea, M.; Neto, P.; Bearee, R. Robot dynamics: A recursive algorithm for efficient calculation of Christoffel symbols. Mech. Mach. Theory 2019, 142, 103589. [Google Scholar] [CrossRef]
- Hudgens, J.C.; Tesar, D. Analysis of a Fully-Parallel Six Degree-of-Freedom Micromanipulator. In Proceedings of the Fifth International Conference on Advanced Robotics ’Robots in Unstructured Environments, Pisa, Italy, 19–22 June 1991. [Google Scholar]
- Liu, M.; Li, C.; Li, C. Dynamics analysis of the gough-stewart platform manipulator. IEEE Trans. Robot. Autom. 2000, 16, 94–98. [Google Scholar]
- Yun, Y.; Li, Y. A general dynamics and control model of a class of multi-DoF manipulators for active vibration control. Mech. Mach. Theory 2011, 46, 1549–1574. [Google Scholar] [CrossRef]
- Wen, S.; Qin, G.; Zhang, B.; Lam, H.; Zhan, Y.; Wang, H. The study of model predictive control algorithm based on the force/position control scheme of the 5-DoF redundant actuation parallel robot. Robot. Auton. Syst. 2016, 79, 12–25. [Google Scholar] [CrossRef]
- Jiao, J.; Wu, Y.; Yu, K.; Zhao, R. Dynamic modeling and experimental analyses of Stewart platform with flexible hinges. J. Vib. Control. 2019, 25, 151–171. [Google Scholar] [CrossRef]
- Gallardo-Alvarado, J.; Rico, J.M.; Frisoli, A.; Checcacci, D.; Bergamasco, M. Dynamics of parallel manipulators by means of screw theory. Mech. Mach. Theory 2003, 38, 1113–1131. [Google Scholar] [CrossRef]
- Gallardo-Alvarado, J.; Rico, J.M.; Delossantos-Lara, P.J. Kinematics and dynamics of a 4- PRUR Schönflies parallel manipulator by means of screw theory and the principle of virtual work. Mech. Mach. Theory 2018, 122, 347–360. [Google Scholar] [CrossRef]
- Liu, Z.; Tao, R.; Fan, J.; Wang, Z.; Jing, F.; Tan, M. Kinematics, dynamics, and load distribution analysis of a 4-PPPS redundantly actuated parallel manipulator. Mech. Mach. Theory 2022, 167, 104494. [Google Scholar] [CrossRef]
- Garcia-Murillo, M.A.; Sanchez-Alonso, R.E.; Gallardo-Alvarado, J. Kinematics and Dynamics of a Translational Parallel Robot Based on Planar Mechanisms. Machines 2016, 4, 22. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mass | Moments of inertia |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.-S.; Wei, S.-T.; Sun, X.-C. Dynamics of a 3-UPS-UPU-S Parallel Mechanism. Appl. Sci. 2023, 13, 3912. https://doi.org/10.3390/app13063912
Zhao J-S, Wei S-T, Sun X-C. Dynamics of a 3-UPS-UPU-S Parallel Mechanism. Applied Sciences. 2023; 13(6):3912. https://doi.org/10.3390/app13063912
Chicago/Turabian StyleZhao, Jing-Shan, Song-Tao Wei, and Xiao-Cheng Sun. 2023. "Dynamics of a 3-UPS-UPU-S Parallel Mechanism" Applied Sciences 13, no. 6: 3912. https://doi.org/10.3390/app13063912
APA StyleZhao, J.-S., Wei, S.-T., & Sun, X.-C. (2023). Dynamics of a 3-UPS-UPU-S Parallel Mechanism. Applied Sciences, 13(6), 3912. https://doi.org/10.3390/app13063912