1. Introduction
As automation technology highly advances, concepts of swarming, Manned and Unmanned Teaming (MUM-T), etc., occurred [
1,
2,
3,
4,
5,
6,
7,
8,
9]. These concepts focused on overcoming a variety of missions which are hard for single robot by using multiple robots [
10,
11,
12,
13,
14]. For example, multiple robots can complete surveillance and reconnaissance missions of a specific area within a short time, while a single robot takes much more time. If there are multiple missions to solve, making a mission plan for each robot considering the purpose of the user is important for efficiency. Although there are various purposes, such as conducting important missions first, minimizing fuel consumption (or minimizing total moving distances), etc., most users want to complete whole missions as soon as possible, which means minimizing total mission completion time.
Mission planning technologies have been developed in various ways [
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30,
31,
32,
33]. One of the general mission planning methods is Consensus-based Bundle Algorithm (CBBA) which is based on scores, i.e., rewards or costs of missions for each robot [
25]. The CBBA algorithm is separated into two steps: the bundle construction step and conflict resolution step. In the bundle construction step, each robot calculates the sequence of missions based on the scores under the assumption that the robot accomplishes all missions. The scoring scheme is designed using the expected start/finish time of tasks, distances between robots and missions, etc., based on the user’s purpose. In the conflict resolution step, each robot decides which missions it will do based on scores calculated in the bundle construction step. Usually, the robot who has the highest score will take the mission that has the maximum score. CBBA is a deterministic allocation algorithm, so results are always same if the inputs, the information of the robots and missions, are same. In addition, the computation cost of CBBA is much lower than for other heuristic algorithms.
The modified task allocation that can handle some constraints based on CBBA is Coupled-Constraint CBBA (CCBBA) [
26]. The missions that have a constraint relationship are grouped as ‘Activity’ and each mission in the activity is set as ‘Element’. Such settings enable easy judgement of whether a mission can be allocated to a robot or not. In addition, it uses optimistic and pessimistic bidding strategies. Each robot bids to the missions based on the strategy for obeying the constraints. However, there are some problems regarding convergence and calculation time for mission planning. Hence, our previous work proposed the Task Allocation and Alignment based on Constraint Table and Alignment Rules (TACTAR), which is modified based on CBBA for centralized mission planning systems [
33]. It handles some spatial and temporal constraints using a constraint table and four alignment rules for mission planning. These methods commonly use only the robot’s own information to score the missions, but the plans of all robots should be considered to minimize the total task completion time. Hence, CBBA, CCBBA, and TACTAR cannot be used for mission allocation, minimizing total mission completion time without any modification.
Qin et al. proposed path planning algorithms for multiple Unmanned Aerial Vehicles (UAVs) to minimize mission completion time [
24]. The problem in this paper is defined as a collection of sparse multiple sensors. The sensor points which have distances less than the communication distance of UAVs are grouped, and the center point of each group is defined as hovering point. Then, an ant colony algorithm for solving Traveling Salesman Problem (TSP) is used to visit whole hovering points by one UAV, and a cycle is made as the result. The k-cycles algorithm is used for decomposing the cycle into the number of UAVs. However, this algorithm is based on basic TSP, which means that UAVs must come back to home, and the home positions for all UAVs must be the same. In addition, the ant colony algorithm is used for solving TSP, so the calculation cost of the algorithm will be fatal when the number of hovering points becomes larger.
Wang et al. also proposed path planning algorithms for multiple fixed-wing UAVs for minimizing mission completion time [
34]. The algorithm focused on the path planning of fixed-wing UAVs for UAV-to-UAV (U2U) communication with the aim of minimum information transmission time in the presence of ground transmitters. The constraints contain the communication throughput requirement, interference from ground transmitters, the speed and acceleration range of each UAV, and the minimum communication distance of UAVs. However, they only consider only one mission: communicating two UAVs with each other. Hence, the algorithm calculates the local path planning for each UAV to minimize information transmission time, not the sequence of missions for each UAV.
In this paper, we propose a centralized mission planning algorithm for multi-robot-multi-mission problems, minimizing total mission completion time. The proposed algorithm is designed based on CBBA to overcome some limitations such as computation time and necessity to set the same home for all robots in the above algorithms. First, we introduced the algorithm for single-robot-multi-mission problems, minimizing total mission completion time based on the method using the bundle construction step in CBBA. It focused on how to decide the sequence of missions that the robot has to work on. Then, the algorithm was expanded for multi-robot-multi-mission problems. To overcome limitations of CBBA, CCBBA, and TACTAR, we proposed bundle adjustment, which adjusts the mission plan only if the total mission completion time could be lower by the adjustment. In order to apply the status of each robot in real time, the proposed algorithm should be run iteratively. However, if the positions of robots are changed, the mission plan could fall into another local optimal solution, so the mission plan could be changed frequently. To prevent this phenomenon, the initial bundle construction, which is based on the arrival times to missions for robots, is performed only at the first run, and the previous mission plan is used from the second iteration instead of the initial bundle construction. Then, some simulation results using the proposed algorithm will be provided.
2. Preliminaries
The mission planning problem for minimizing total mission completion time is to find a sequence of missions for each robot that has the minimum total mission completion time as seen below:
subject to
where
is finish time of mission
if robot
conduct mission
along the path
;
is the flag that is 1 if mission
is taken to robot
and 0, or otherwise,
and
are the number of robots and missions, respectively,
is the maximum number of missions that the robot can take, and
is the minimum number between
and
.
and
are robot and task group, respectively, so the number of elements in
is
and the number of elements in
is
. Note that one mission is taken to only one robot as described in Equation (2).
The mission planning is composed of two parts: mission allocation and mission alignment. The mission allocation is to decide which robot will take which mission. The mission alignment is to calculate the start time and the finish time of each mission based on the result of mission allocation. Some mission planning algorithms conduct mission allocation at first for all missions; then, the mission alignment is performed once based on the mission allocation result. The other mission planning algorithms conduct mission allocation for one mission, and then the mission alignment is performed for one mission. This procedure repeats for all missions. This sequence is used when the mission allocation uses the start time or the finish time of each mission for the results of mission alignment.
4. Mission Planning Scheme
In this section, we propose a centralized mission planning algorithm for minimizing the total mission completion time. It is based on minimizing total mission completion time for a single-robot-multi-mission problem, modified from the bundle construction in CBBA. So, the algorithm for single-robot is introduced first, and it expands to the algorithm for the multi-robot problems. Note that only mission alignment is needed in single-robot-single-mission problems. In addition, note that this section is focused on the mission planning, not path planning, for minimizing total mission completion time.
4.1. Single-Robot-Multi-Mission Problem
In Single-Robot-Multi-Mission (SRMM) problem, one robot has to conduct all missions, so there is no need to select missions to conduct. All the mission planning has to achieve is to decide the sequence of missions and to calculate start/finish time of each mission. To find the optimal sequence of missions, we propose a process similar to line 6 of Algorithm 1 as described in Algorithm 2.
| Algorithm 2 Mission planning: SRMM |
| 1: | while , do |
| 2: | |
| 3: | |
| 4: | |
| 5: | |
| 6: | end while |
In line 2, the total mission completion time is calculated when a mission is added to nth space of sequence using the speed of the robot, the distances between the robot and mission areas, and duration of missions. It repeats for all missions and lengths of sequence. Then, it finds the (mission-space) pair that has the minimum total mission completion time. Finally, the found mission is added to the found space of sequence. Lines 2–5 of Algorithm 2 repeat until all missions (or missions) are allocated. After the final mission is allocated, the start/finish times of each mission are calculated.
4.2. Multi-Robot-Multi-Mission Problem
Unlike the SRMM problems, each robot must select which missions it will perform in Multi-Robot-Multi-Mission (MRMM) problems, considering the equipment status of robots. For example, the robot that does not have camera cannot conduct surveillance and reconnaissance missions. However, it is hard to conduct a mission allocation because not only a robot but also the whole robots’ planning results must be considered to achieve total mission completion time minimization. So, we propose initial bundle construction and bundle adjustment methods as described in Algorithm 3.
| Algorithm 3 Mission planning: MRMM |
| 1: | if first time |
| 2: | Construct initial bundle |
| 3: | else |
| 4: | bundle = result of adjustment |
| 5: | end if |
| 6: | Adjust bundle |
If it is first time for the mission planning, initial bundle construction step runs. If not, the result of the previous adjustment is copied into the bundle for preventing to fall into local optimization solutions during mission planning iterations. Then, the bundle adjustment for total mission completion time minimization is run.
In initial bundle construction, as described in Algorithm 4, each robot calculates the expected finish time of missions based on the positions of the robot and missions, the speed of the robot, and the duration of each mission for the robot. Then, the table of finish time of missions for robots will be made. The (robot-mission) pair that has the minimum finish time of the mission is found in the table. If the pair has an infinity finish time of mission (initial value of the table), all possible missions are already added to the bundles, so it breaks out of the iterations. If not, it checks the selected robot that can conduct the selected mission. If the robot cannot conduct the mission,
in the table is set to infinity (or initial value) and another pair in the table is found. If the robot can conduct the mission, the mission is added to the bundle of the robot. The column (or row) about the mission is set to infinity (or initial value) in the table, and the procedure is repeated until all missions are added to the bundle.
| Algorithm 4 Construct initial bundle |
| 1: | |
| 2: | while 1 |
| 3: |
|
| 4: |
|
| 5: | if |
| 6: | break |
| 7: | else |
| 8: | if cannot do |
| 9: | |
| 10: | else |
| 11: | |
| 12: | |
| 13: | end if |
| 14: | end if |
| 15: | end while |
In the bundle adjustment, line 6 of Algorithm 3, the robot that has the maximum total mission completion time is found. Then, one of the missions in the bundle of that robot is moved to the bundles of the others who can conduct the mission. The total mission completion time for each robot can be calculated based on the bundles following Algorithm 2, because fixing the bundles of each robot means MRMM problems are simplified into SRMM problems for each robot. The
pair that has the minimum total mission completion time is searched. If there are multiple
pairs that have the same minimum total completion time, a
pair in which the larger value is the smallest among the total mission completion time of
and
is selected. Finally, the total mission completion times for the results of previous and current iterations are compared. If the current one is lower than the previous one, the current bundle and total mission completion time are copied into the previous results. Then, it goes to line 4 of Algorithm 5 and the procedures are repeated. If not, it means the previous results are the optimal mission plans for minimizing the total mission completion time, so it outputs the previous results.
| Algorithm 5 Adjust bundle |
| 1: | |
| 2: | |
| 3: | while 1 |
| 4: |
|
| 5: | for |
| 6: |
|
| 7: |
|
| 8: |
|
| 9: | if can do |
| 10: | calculate for |
| 11: | end for |
| 12: |
|
| 13: |
|
| 14: |
|
| 15: | if multiple that has same |
| 16: | choose that has |
| 17: | end if |
| 18: | if |
| 19: |
|
| 20: |
|
| 21: | else |
| 22: | break |
| 23: | end if |
| 24: | end while |
5. Result and Discussion
In this section, some simulation results are shown to assess the algorithm that we have proposed. We simulated three cases, a simple case, medium case, and huge case, to prove the performance of proposed algorithm. The simple case is composed of 3 robots and 8 missions, the medium case is composed of 4 robots and 30 missions, and the huge case is composed of 6 robots and 50 missions. The speed of all robots and the duration of all missions are equally set to 2 m/s and 5 s, respectively, to simplify the problem in the simple case. In the medium and huge cases, the speed of each robot and the duration time of each mission are set differently to represent the general situations. The detailed scenarios of simulations are described in
Table 3.
CBBA and TACTAR are used to show that the proposed algorithm is improved over the existing algorithm. The total mission completion time and computational cost are set as performance indicators. We used OpenMP parallel computing to run each algorithm, and the computational cost of each algorithm is measured based on the result of the parallel computation. The environment of simulations is described in
Table 4.
5.1. The Simple Case
The results of the simple case are shown in
Figure 1,
Figure 2 and
Figure 3.
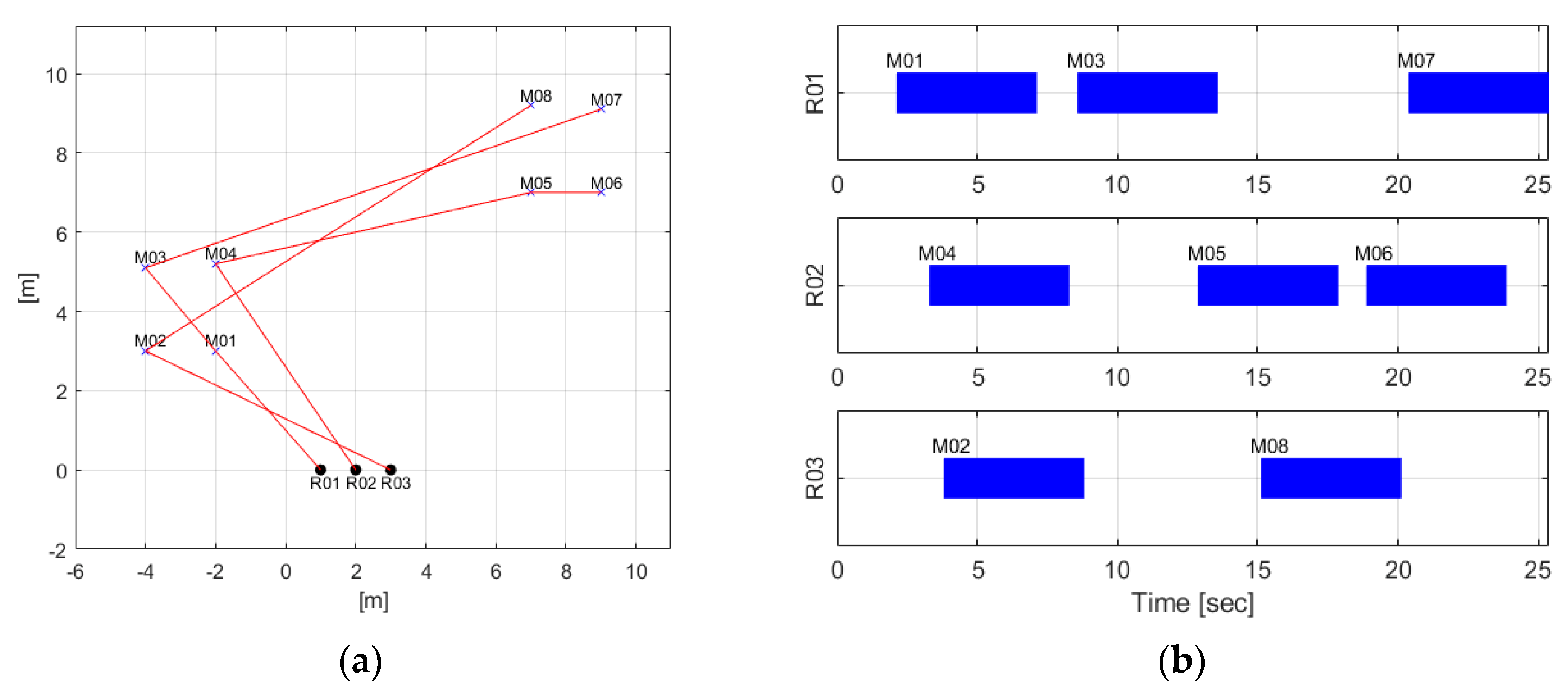
Figure 1 depicts the results of CBBA,
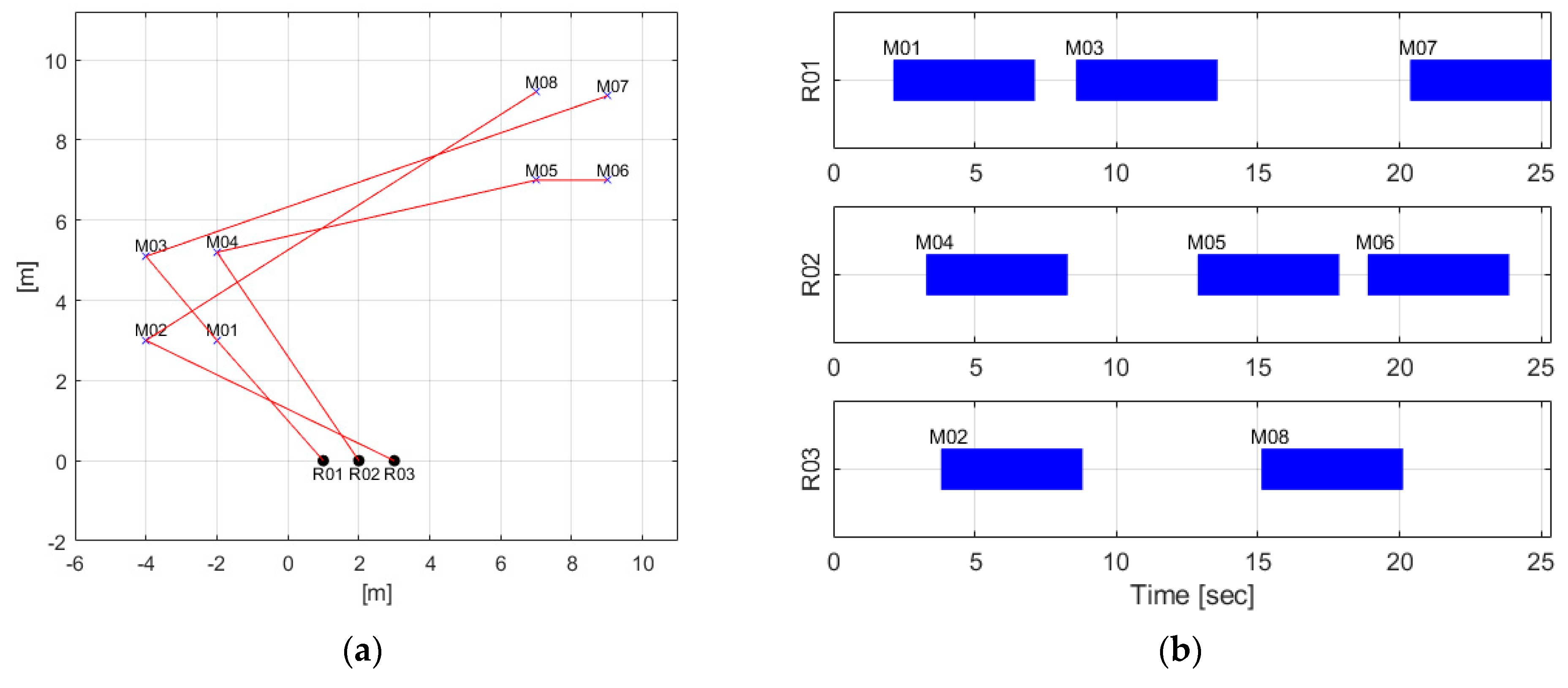
Figure 2 depicts the results of TACTAR, and
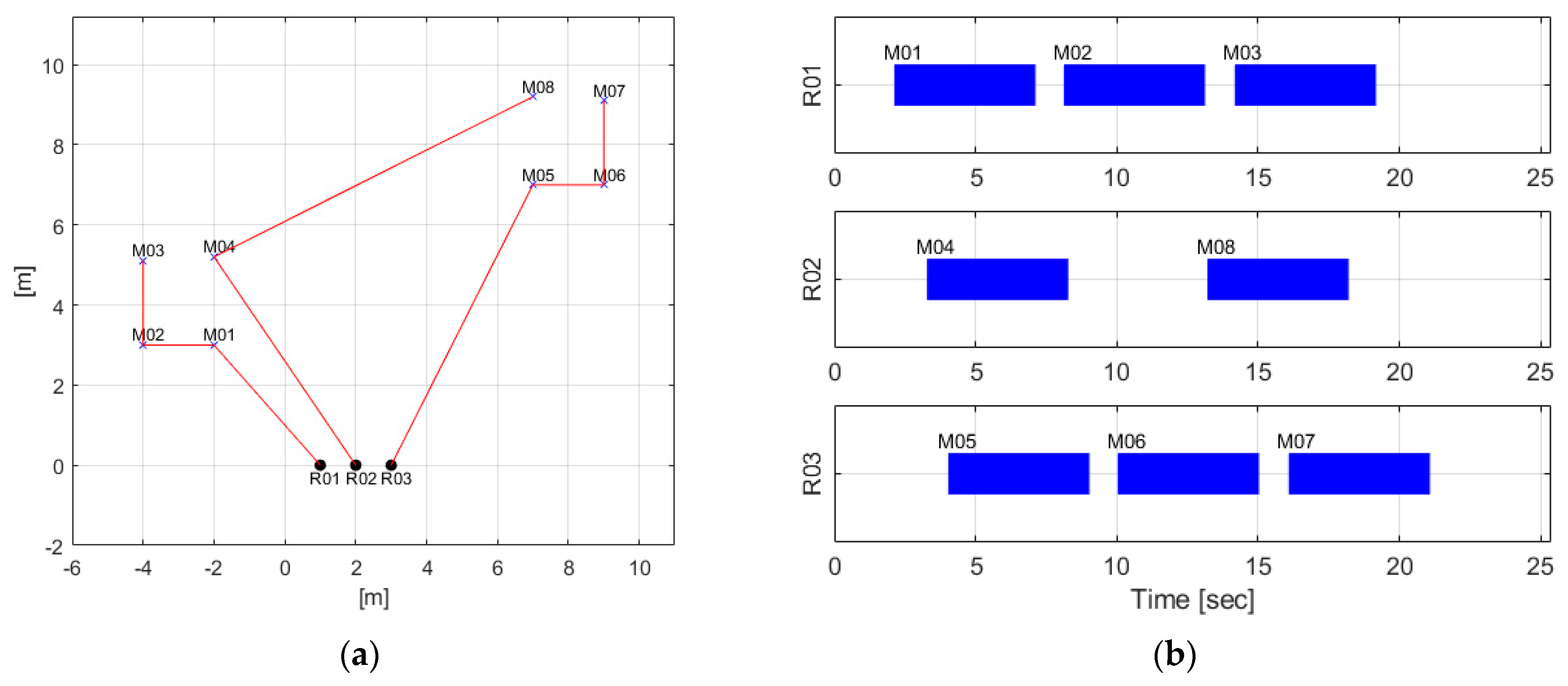
Figure 3 depicts the results of the proposed algorithm. Panel (a) in
Figure 1,
Figure 2 and
Figure 3 shows the 2D situation map to easily check the mission plan result of each algorithm. The ‘R’ and ‘M’ means robot and mission, respectively. The following number means the index of robots and missions. The red lines mean the sequence of missions for each robot. For example, R01 will conduct M01, M03, and M07 sequentially, as seen in
Figure 1a. As seen in
Figure 1 and
Figure 2, the mission plan result of CBBA is absolutely the same as with the result of TACTAR. However, the mission plan result of the proposed algorithm is totally different to them. R01 and R03 will conduct (M01-M02-M03) and (M05-M06-M07), which are the closest missions to the R01 and R03, respectively. R02 will conduct M04 and M08, which were the last missions for R01 and R03, so the total mission completion time is minimized.
Panel (b) in
Figure 1,
Figure 2 and
Figure 3 shows a timetable of each algorithm to easily check the mission completion time of each robot. The blue boxes mean the duration times of missions. The ‘R’, ‘M’, and the number after them have the same meanings as in the panel (a). In the panel (b) of
Figure 1 and
Figure 2, R01 will complete the last mission, M07, at 25.37 s. So, the total mission completion times of CBBA and TACTAR are 25.37 s. In the panel (b) of
Figure 3, R03 will complete the last mission, M07, at 21.08 s, which is about 4.3 s lower than the results of CBBA and TACTAR.
The calculation times of CBBA, TACTAR, and the proposed algorithm for the simple case are 0.0055 s, 0.0068 s, and 0.0155 s, respectively. The computational cost of the proposed algorithm is about 2~3 times larger than the others, but it is still fast enough to run it in real-time.
Figure 1.
The results for simple case using CBBA: (a) 2D situation map; (b) timetable.
Figure 1.
The results for simple case using CBBA: (a) 2D situation map; (b) timetable.
Figure 2.
The results for simple case using TACTAR: (a) 2D situation map; (b) timetable.
Figure 2.
The results for simple case using TACTAR: (a) 2D situation map; (b) timetable.
Figure 3.
The results for simple case using proposed algorithm: (a) 2D situation map; (b) timetable.
Figure 3.
The results for simple case using proposed algorithm: (a) 2D situation map; (b) timetable.
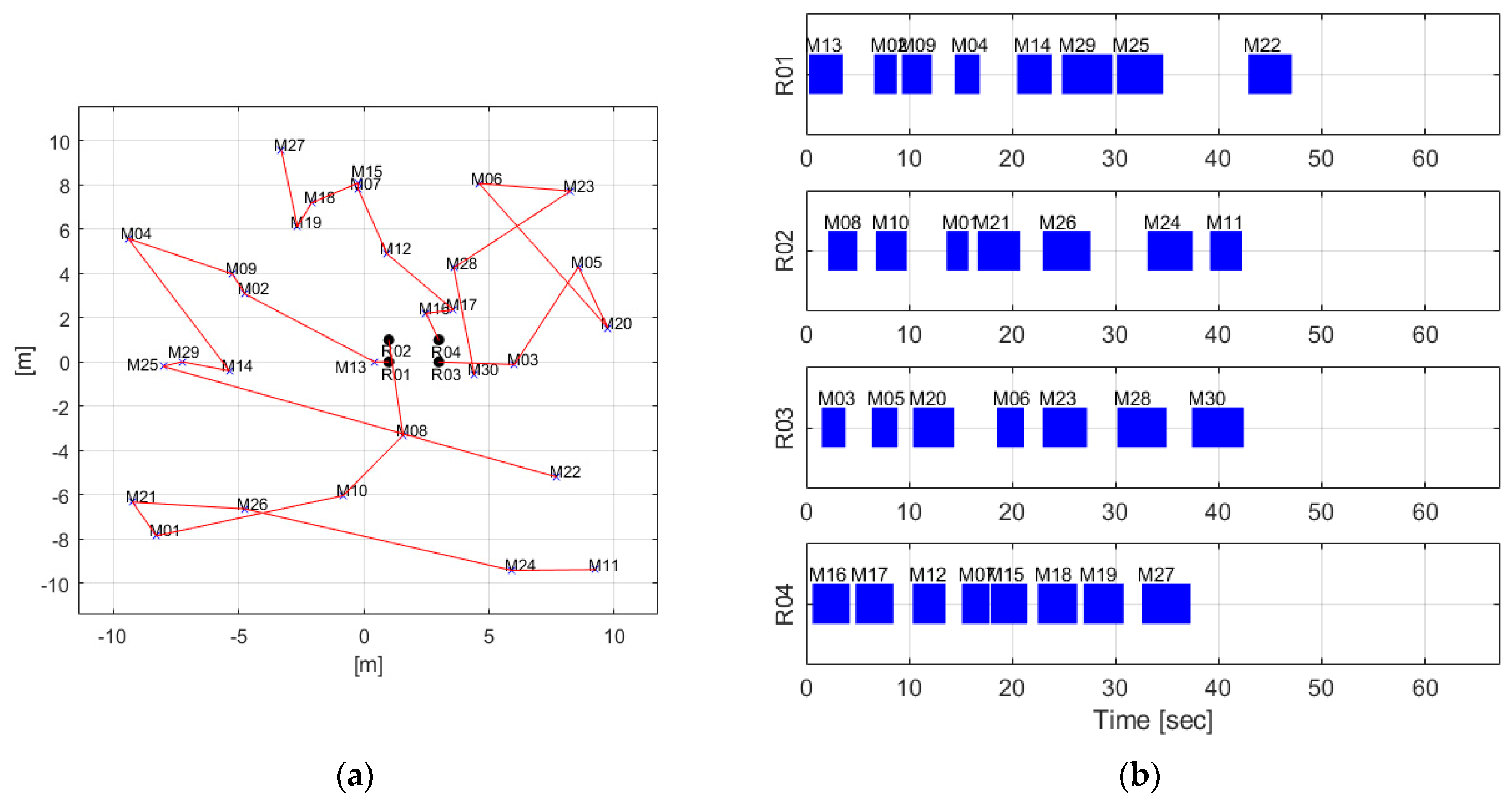
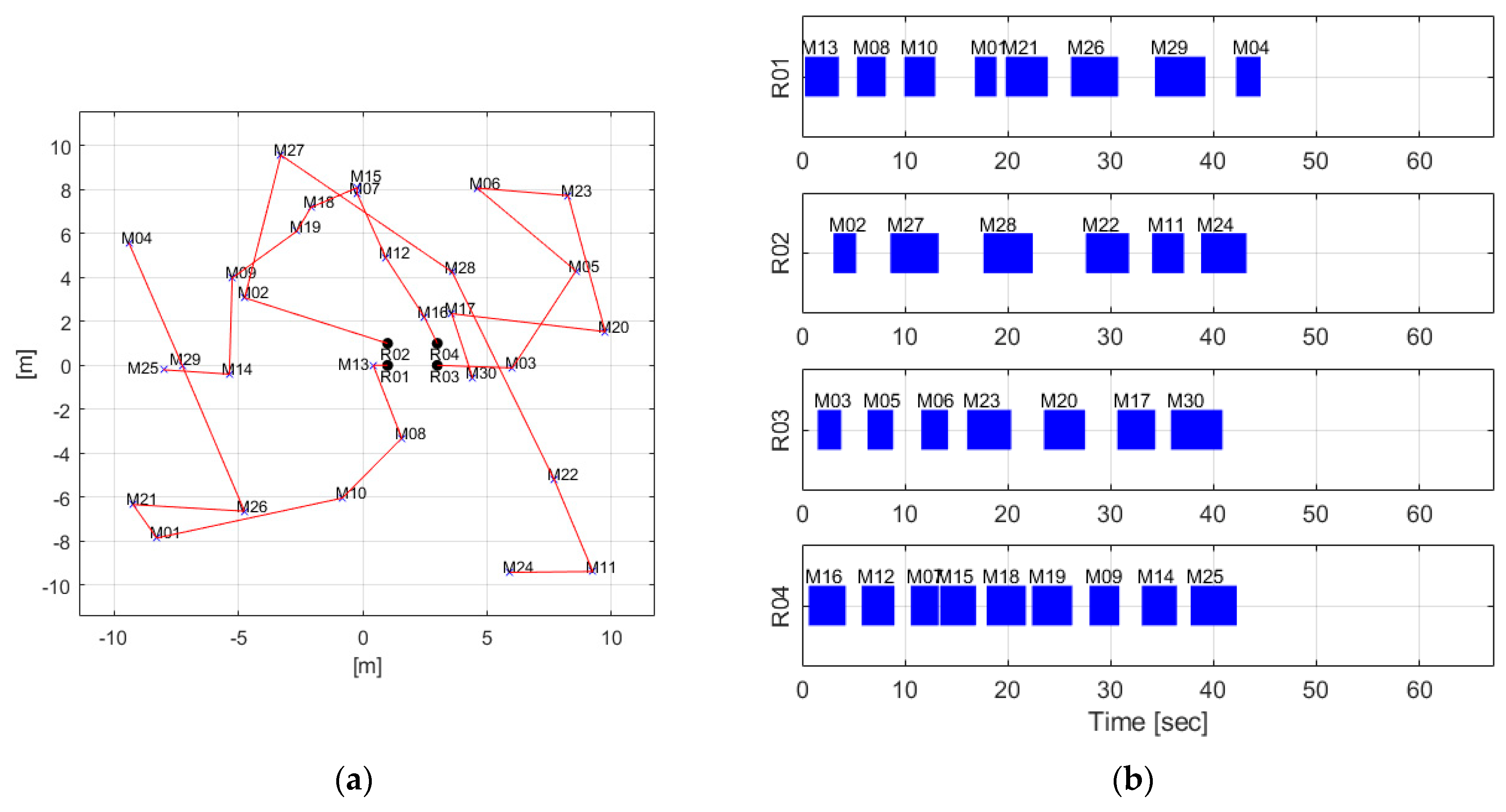
5.2. The Medium Case
The results of the medium case are shown in
Figure 4,
Figure 5 and
Figure 6.
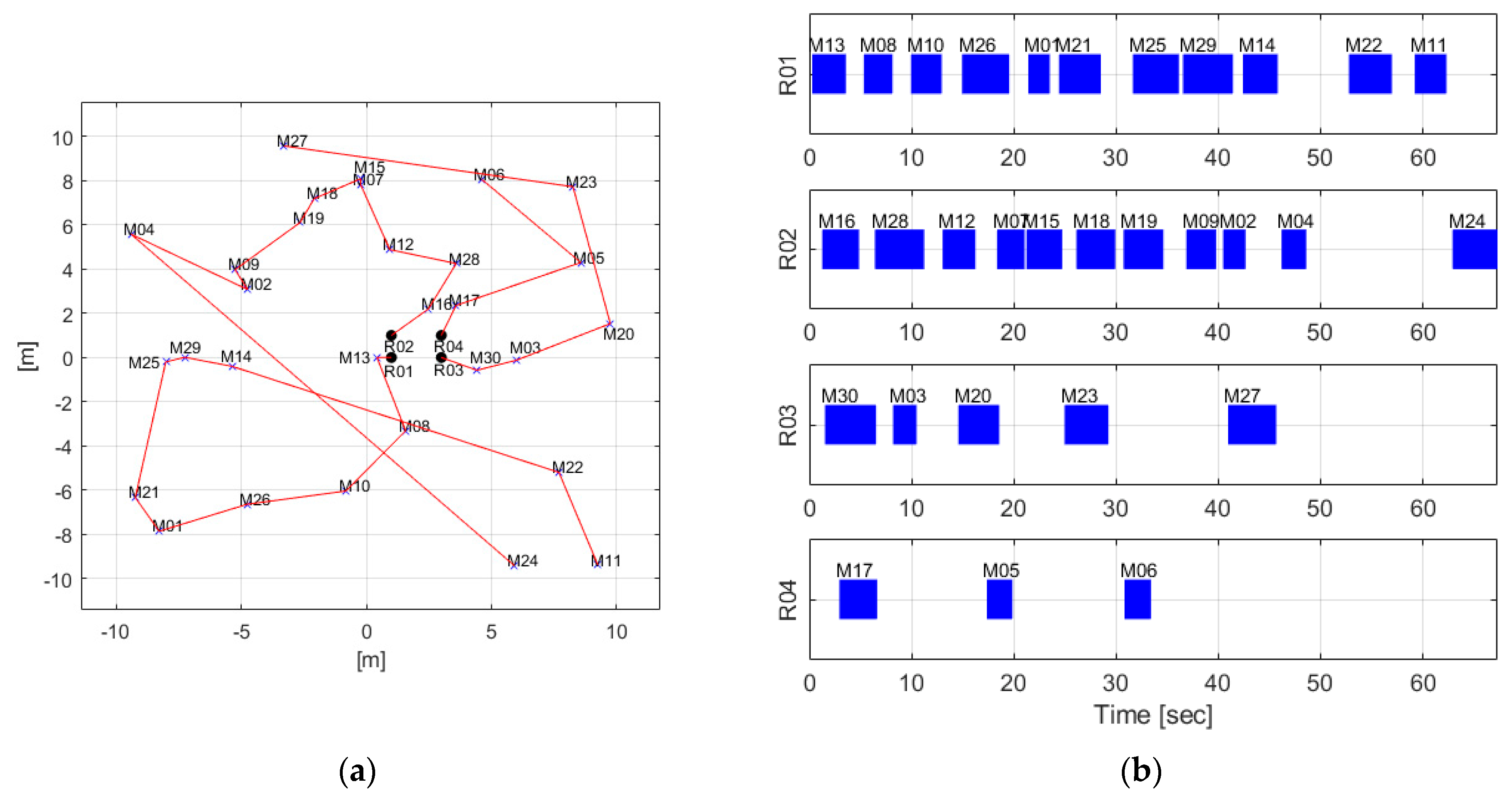
Figure 4 depicts the results of CBBA,
Figure 5 depicts the results of TACTAR, and
Figure 6 depicts the results of the proposed algorithm. Unlike the simple case, the mission plan result of CBBA is different to the result of TACTAR, as seen in
Figure 4 and
Figure 5. R01 will conduct M13 and go to M08 in
Figure 4a, while it will conduct M13 and go to M02 in
Figure 5a. In
Figure 6a, R01 will initially conduct the same mission as the result of CBBA, M13-M08-M10. However, R01 will conduct M01 after finishing M10 in
Figure 6a, while it will conduct M26 in
Figure 4a. The mission plans of R02~04 calculated by the algorithms are very different.
Panel (b) in
Figure 4,
Figure 5 and
Figure 6 shows a timetable of each algorithm for the medium case. In the panel (b) of
Figure 4, R02 will complete the last mission, M24, at 67.30 s. In the panel (b) of
Figure 5, R01 will complete the last mission, M22, at 47.07 s, which is about 20.3 s lower than the results of CBBA. In the panel (b) of
Figure 6, R01 will complete the last mission, M04, at 44.59 s, which is about 22.8 and 2.5 s lower than the results of CBBA and TACTAR, respectively. The main reason is the bundle adjustment step in the proposed algorithm. The number of missions each robot should conduct in
Figure 4b are 11, 11, 5, and 3. However, in the number of missions each robot should conduct in
Figure 6b are 8, 6, 7, and 9. It means that the missions of the robots that need to conduct more missions are distributed to the robots that have fewer missions by the bundle adjustment step.
The calculation times of CBBA, TACTAR, and the proposed algorithm for the simple case are 0.0436 s, 0.0199 s, and 0.0342 s, respectively. Unlike the results for the simple case, the proposed algorithm has a lower computational cost than CBBA for the medium case. The computational cost is slightly increased, but it is still fast to run it in real-time.
Figure 4.
The results for medium case using CBBA: (a) 2D situation map; (b) timetable.
Figure 4.
The results for medium case using CBBA: (a) 2D situation map; (b) timetable.
Figure 5.
The results for medium case using TACTAR: (a) 2D situation map; (b) timetable.
Figure 5.
The results for medium case using TACTAR: (a) 2D situation map; (b) timetable.
Figure 6.
The results for medium case using proposed algorithm: (a) 2D situation map; (b) timetable.
Figure 6.
The results for medium case using proposed algorithm: (a) 2D situation map; (b) timetable.
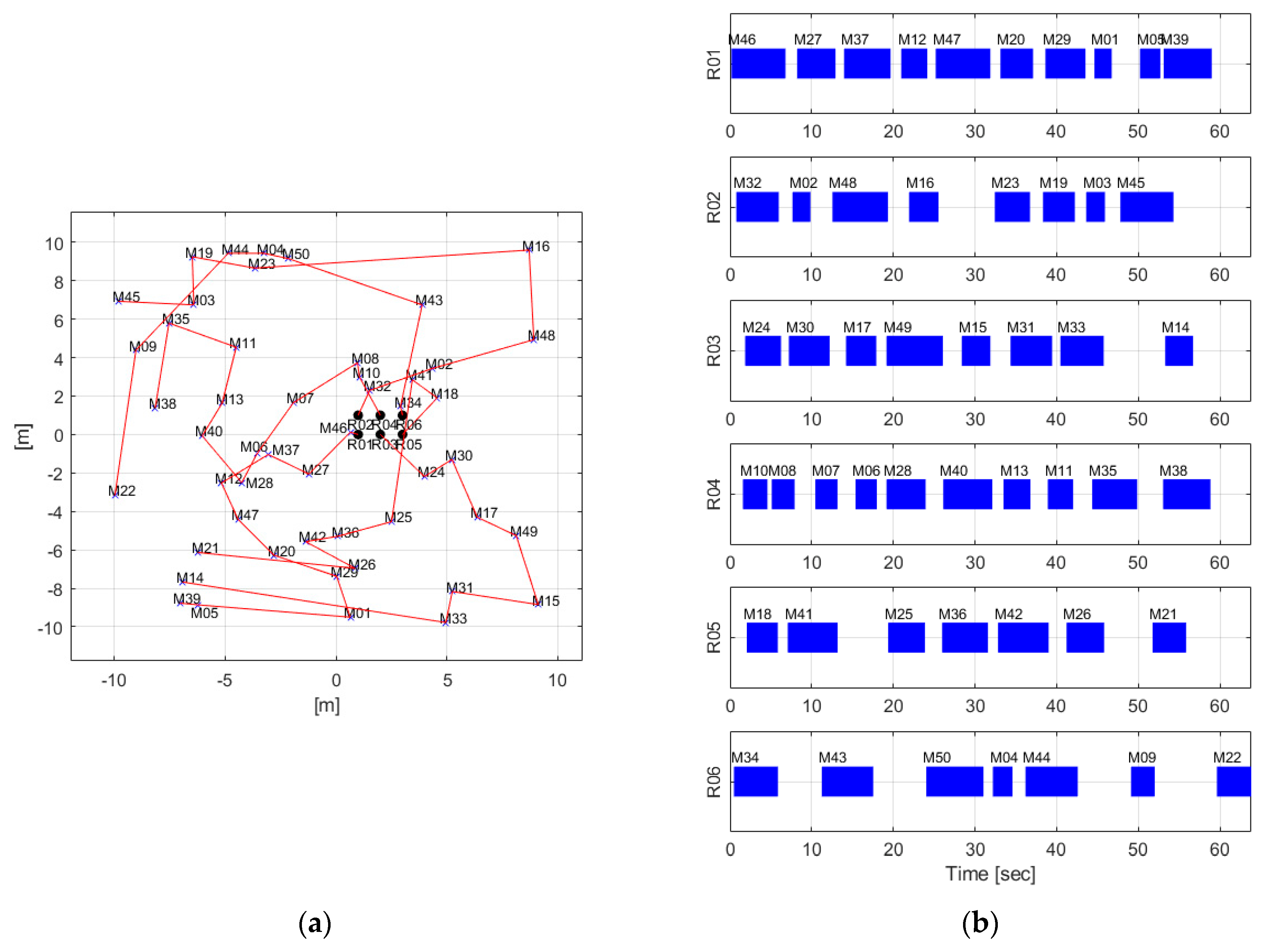
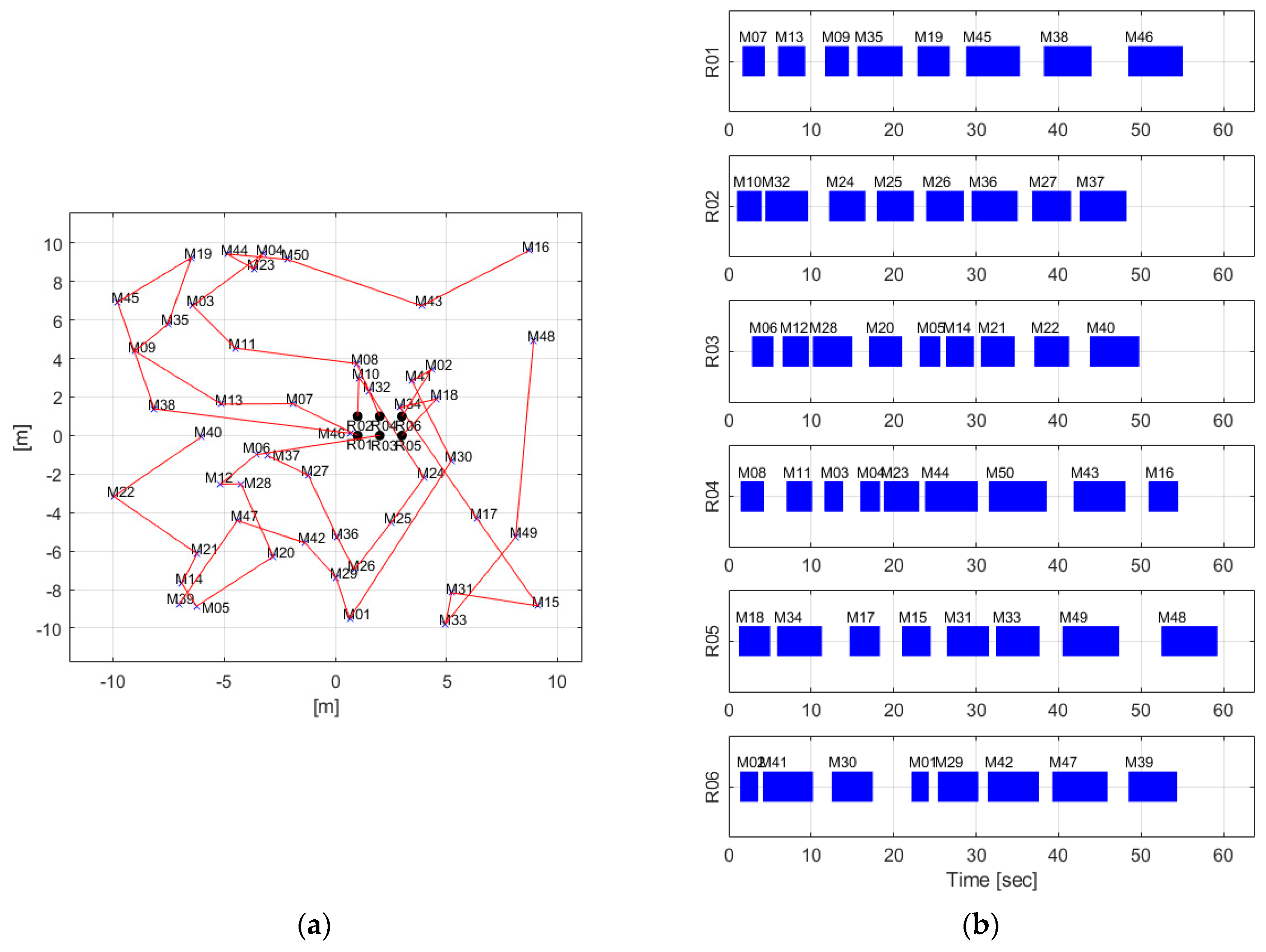
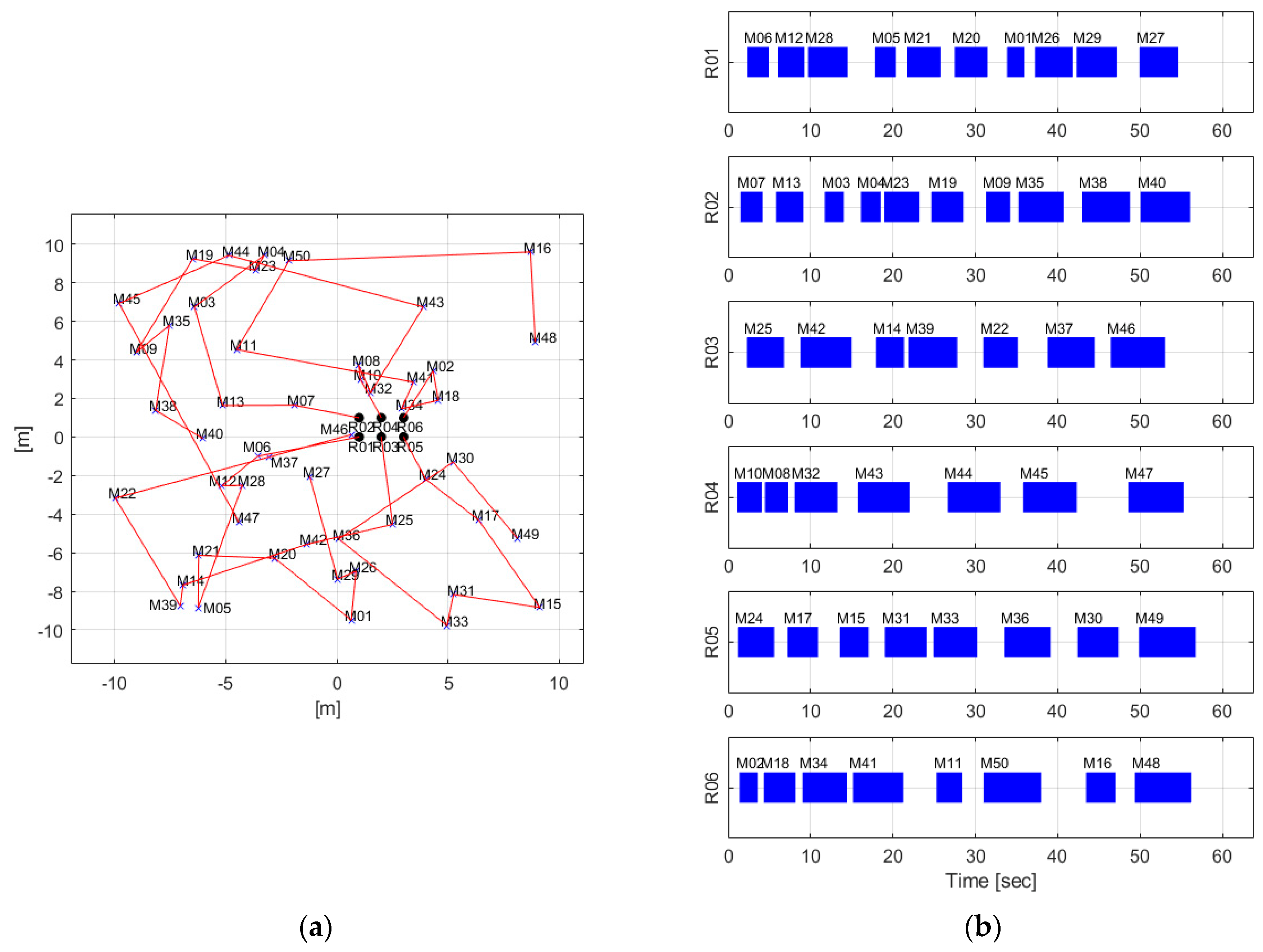
5.3. The Huge Case
The results of the huge case are shown in
Figure 7,
Figure 8 and
Figure 9.
Figure 7 depicts the results of CBBA,
Figure 8 depicts the results of TACTAR, and
Figure 9 depicts the results of the proposed algorithm. Like the medium case, the mission plan results of CBBA, TACTAC, and the proposed algorithm are totally different from each other. R01 will conduct M46, M27, M37, M12, M47, M20, M29, M01, M05, and M39 sequentially in
Figure 7a. However, it will conduct M07-M13-M09-M35-M19-M45-M38-M46 and M06-M12-M28-M05-M21-M20-M01-M26-M29-M27 in
Figure 8a and
Figure 9a, respectively.
Panel (b) in
Figure 7,
Figure 8 and
Figure 9 shows a timetable of each algorithm for the huge case. In the panel (b) of
Figure 7, R06 will complete the last mission, M22, at 63.83 s. In the panel (b) of
Figure 8, R05 will complete the last mission, M48, at 59.27 s, which is about 4.6 s lower than the results of CBBA. In the panel (b) of
Figure 9, R05 will complete the last mission, M49, at 56.76 s, which is about 7.1 and 2.5 s lower than the results of CBBA and TACTAR, respectively. The performance of the bundle adjustment step in the proposed algorithm can also be seen in the huge case. However, unlike the medium case, the number of missions each robot should conduct in
Figure 7b and
Figure 9b are (10, 8, 8, 10, 7, 7) and (10, 10, 7, 7, 8, 8), respectively, which are similar to each other. It means that the bundle adjustment step in the proposed algorithm considers not only the number of missions but also the total mission time of each robot.
The calculation times of CBBA, TACTAR, and the proposed algorithm for the simple case are 0.1815 s, 0.0754 s, and 0.1636 s, respectively. Like the results for medium, the proposed algorithm has a lower computational cost than CBBA for the huge case. The computational cost is highly increased compared to the simple case, but it is still fast to run it in real-time.
Figure 7.
The results for huge case using CBBA: (a) 2D situation map; (b) timetable.
Figure 7.
The results for huge case using CBBA: (a) 2D situation map; (b) timetable.
Figure 8.
The results for huge case using TACTAR: (a) 2D situation map; (b) timetable.
Figure 8.
The results for huge case using TACTAR: (a) 2D situation map; (b) timetable.
Figure 9.
The results for huge case using proposed algorithm: (a) 2D situation map; (b) timetable.
Figure 9.
The results for huge case using proposed algorithm: (a) 2D situation map; (b) timetable.
6. Conclusions
In this paper, we suggested a centralized mission planning algorithm of single/multiple robots for minimizing total mission completion time. First, we introduced the algorithm for single-robot-multi-mission (SRMM) problems, minimizing total mission completion time based on the bundle construction step in CBBA. In SRMM problems, which robot will take the mission was already decided, so it focused on how to decide the sequence of missions that the robot has to work on. Then, the algorithm was expanded for multi-robot-multi-mission (MRMM) problems. Unlike SRMM problems, it had to decide which robot will take the mission. However, it is hard to decide at once because the whole situation needs to be considered to minimize the total mission completion time. So, the initial bundles were constructed based on the expected finish time of each mission for robots and bundles and were adjusted iteratively. Finally, we demonstrated simulation results comparing them with CBBA and TACTAR, the existing mission planning algorithm, and the proposed algorithm. To verify the performance of these algorithms for various situations, we selected 3 cases: the simple case, which was composed of 3 robots and 8 missions, the medium case, which was composed of 4 robots and 30 missions, and the huge case, which was composed of 6 robots and 50 missions. The results showed that the proposed algorithm always outputs the mission plan that has the minimum total mission completion time. In addition, the computational cost of the proposed algorithm is lower than CBBA, and larger than TACTAR. However, the calculation time of our algorithm is fast enough to use in real-time applications.
One of the limitations in our algorithm is that it cannot handle constraints like TACTAR. It is important because most users want to set constraints for various applications. The constraints are separated into two types: the spatial ones and the temporal ones. The spatial constraints are related to mission allocation. A typical spatial constraint is MUTual Exclusive (MUTEX). The temporal constraints are related to the mission alignment, e.g., mission time. The typical spatial constraints are ‘Before’, ‘After’, ‘Simultaneous’, etc. The modification of our algorithm to handle those constraints is the focus of our next work.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}