Abstract
To improve the stability of automatic retransmission requests, a competition control method for automatic retransmission requests of cooperative-based listening nodes is proposed. Because the number of source nodes involved in retransmission communication is reduced, the method reduces the communication energy consumption. Cooperative communication consists of two main parts of work. When the source node sends signals to the surrounding nodes, the relay nodes and other nodes receive the broadcast signals. The signals received by both nodes are the same. A node competition mechanism based on the probability of link disruption as an indicator is designed. The node with higher energy is identified as the node that retransmits the signal. An experiment on the performance comparison of multiple algorithms is organized by simulation. The results show that the proposed new strategy has lower values in BER and BER metrics. This indicates that the proposed method transmits high values of signal quality compared to other dominant methods of retransmitting signals. Because the forwarded signal is successfully transmitted and the source node is no longer involved in the retransmission effort. In cooperative communication, the number of retransmission requests is reduced, and the energy consumed by the system is reduced. Because the improved algorithm achieves low-power communication, the proposed algorithm is practical and innovative in cooperative communication.
1. Introduction
Automatic retransmission request (ARQ) strategy is a key technique to reduce the energy consumption of cooperative communication. Reducing the number of signal retransmissions has been the focus of scholars [1]. Due to the increase in the number of nodes, cooperative communication is used to share data in clustered networks. However, the energy provided by the communication system is limited, so low-energy consumption communication techniques have become the focus of scholars’ research today [2]. In the signal-forwarding phase of cooperative communication, the cooperative automatic retransmission request (CARQ) strategy can improve the probability of successful signal transmission, but the existing methods consume too much energy. It has been found that an excessive number of retransmissions is the direct cause of energy consumption [3]. The method to reduce the number of retransmissions is an important re-investigation direction for low-power cooperative communication.
Scholars have been working on the study of automatic retransmission request strategies. Following the rise of wireless communication, Shafique T first proposed the framework of automatic retransmission request protocol for cooperative communication in cooperative ARQ [4]. The protocol added an answer mechanism for the destination node, and the two-way communication model provided a classical research model for subsequent studies. Thereafter, Tseng C K designed a relay model with three nodes forwarding signals based on this model [5]. The new model of relay forwarding signals solves the problem that direct communication cannot transmit information, and the relay model of signal forwarding by three nodes is a classical model of cooperative communication, which has attracted the attention of communication engineering scholars. Yu Zhiyuan introduced the ARQ model in the study of cooperative communication and CARQ techniques gained importance in multi-user network applications due to the retransmission signals that improved the stability of the network [6]. Although the early studies used the CARQ model with packet and random coding, the transmission delay of the system was reduced and the technology of communication engineering was improved. Rahman A A was the first scholar to introduce cooperative communication into wireless communication networks [7], the connectivity of cooperative communication has improved the stability of wireless communication networks, and cooperative communication accelerated the development of wireless networks. To improve the bandwidth of LAN communication, Kim C proposed a CARQ strategy for channel packet transmission [8]. The strategy solves the inefficiency of multi-link communication with packet retransmission. However, the disadvantage of the strategy is that it consumes a lot of energy as a cost. Xie M proposed an improved CARQ strategy based on two-hop switching [9]. The strategy shortens the distance of the communication link and the communication BER is improved. However, the probability of interruption of the communication process increases due to irregular switching time. Zhou Y designed the CARQ adaptive control method with adjustable power and delay [10]. The method improves the power allocation control parameters and the communication time of the network nodes is extended. Additionally, the life cycle and stability of CARQ are improved because the power parameters are also adjustable. As the number of communication nodes increases, the method is discarded due to the increase in the regulated parameters as well. At the same time, the hardware memory capacity required to control the method is increased. Sellami N integrated queuing theory into the amplify and forward CARQ strategy [11]. The method improves the throughput of the system and the efficiency of communication transmission is enhanced. However, due to the long computation time of the queuing theory algorithm, the algorithm cannot be applied to large-scale networks. To reduce the time delay of communication, Rafiee M proposed the CARQ method with K-mean estimation [12]. Nodes are classified by data preprocessing and nodes with high channel quality are selected to participate in the competition process of retransmitting the signal. The algorithm reduces the energy consumption in the retransmission process. Because data preprocessing requires grouping and arranging nodes, the algorithm requires a large storage space hardware. The hardware is too expensive and is gradually abandoned for use. In the last few years of research, the focus of scholars shifted to distributed networks. The classical results of CARQ with multiple relays were proposed for optimizing the control accuracy. Dou Z proposed a packet multiple relay retransmission strategy [13]. The method pre-packets the data, and the communication between the packets relies on relay forwarding signals. Within the packets, packets are forwarded simultaneously according to different links, the channel with better transmission capability defines the best communication link, and the best forwarding node is responsible for forwarding the data of the link. The communication process consumes a lot of energy because the data needs to be pre-processed, while the probability of successful data forwarding is low. Although some scholars have modified the algorithm, the distribution of communication nodes is not regular, the relay forwarding time is too long, the secondary retransmission link is not changed, and the probability of successful signal retransmission is not improved.
Automatic retransmission request strategies for multiple relay nodes are the focus of contemporary research. The research history of the ARQ technique and relay selection technique in cooperative communication is shown in Table 1. Currently, in order to reduce the power consumption, scholars focus more on algorithms such as “relay selection, channel quality and power allocation” [14,15,16]. Farag M M [17] proposed a multi-relay automatic retransmission selection strategy. First, multiple relays are classified by means of subcluster screening, and the node with the lowest probability of final signal interruption within the group is defined as the best node. In the second stage of cooperative communication work, the best relay is used as a forwarding node for retransmitting the signal, and the signal is retransmitted four times before stopping transmission. Due to the increase in the number of relay nodes, each relay node needs to compete before transmitting the signal, so the computation time of the algorithm is long and the algorithm is not suitable for clustered networks. Based on this, a novel competing retransmission request strategy based on listening nodes is proposed. In the second stage of communication, the listening node participates in the signaling retransmission competition process of the best relay node. Since the source node broadcasts the signal and the surrounding nodes receive the signal with increased probability of successful decoding, the listening node has the ability to compete. When the relay node forwards the source signal to the destination node, the surrounding non-decoding nodes gain the same diversity gain at this time. If the relay forwarding fails, the non-decoding nodes will participate in the second stage of the retransmission competition. Since the channel of the listening node is better than that of the relay node, the probability of the signal being successfully decoded is greatly increased by the good quality of the signal forwarded by the listening node. Since the communication process no longer initiates the first stage signal repetition command, the source node is not involved in the retransmission process and the goal of low-power communication of the system is satisfied. The experiments show that the improved method has good practicality and is suitable for multi-node cooperative communication.

Table 1.
A comparison of classical literature on automatic retransmission request strategies for cooperative communication.
2. Theoretical Study
The automatic retransmission request policy consists of a total of three parts: signal broadcast, forwarding and retransmission. First the signal is broadcasted by the source node to the surrounding nodes, after that the relay node forwards the signal to the destination node. The destination node gives feedback to retransmit the signal because of decoding failure. Finally, the listener node retransmits the signal. Relay selection and retransmission competition are two key techniques for the design.
2.1. Optimal Relay Node Selection
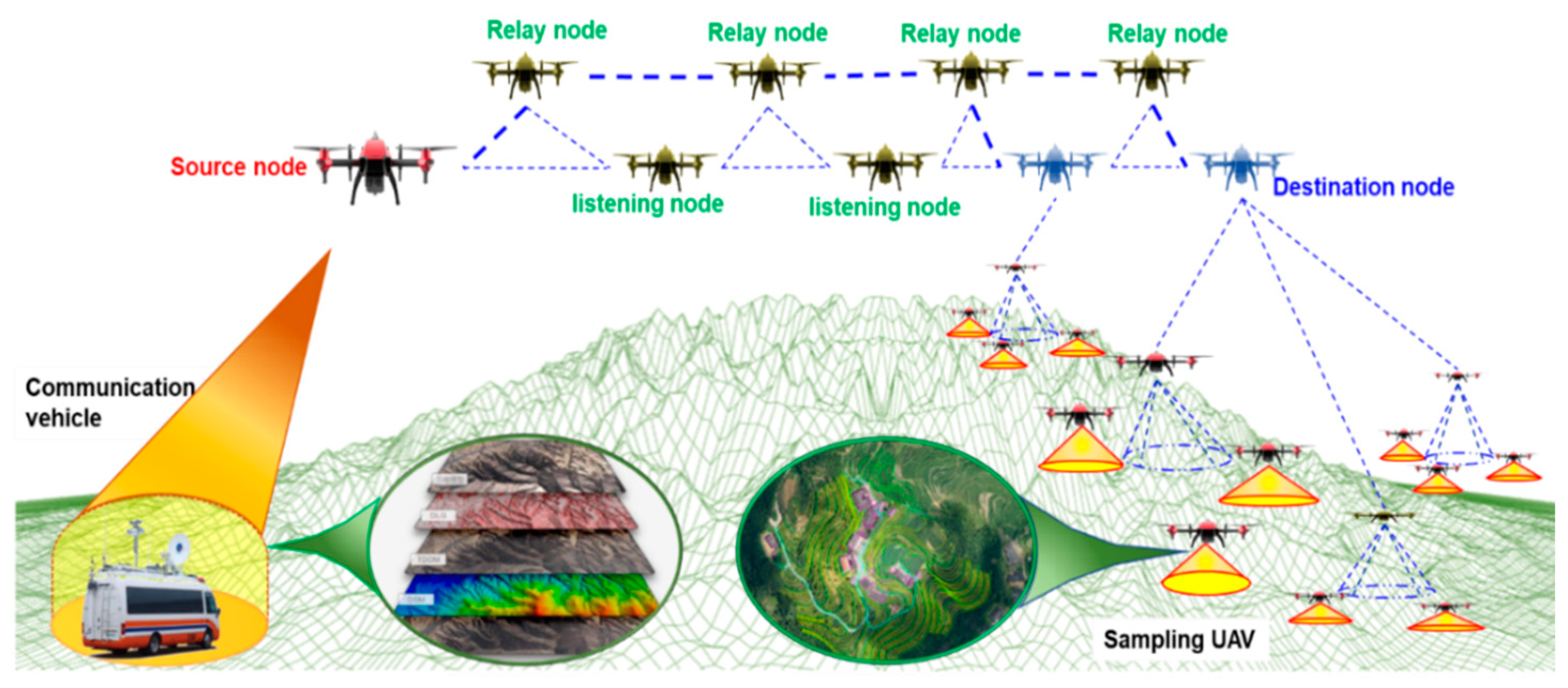
Cooperative communication consists of two phases: signal broadcasting and signal forwarding. Figure 1 shows a schematic diagram of how cooperative communication data transmission works. The first phase of work is the broadcast of signals by the source node [18]. The data signal is transmitted to the surrounding nodes in broadcast form, and the surrounding nodes obtain a diversity copy of the signal directly from the source node. The second phase of work is the relay node forwarding the signal [19]. The optimal relay node forwards a copy of the signal to the destination node and its surrounding nodes are also able to receive a copy of the signal it transmits. The destination node decodes the accepted signal and transmits a feedback signal to the relay node. The relay node decides whether to retransmit the signal based on the feedback signal. The two-stage communication of cooperative communication broadcasts the emitted signal, so the surrounding nodes are also able to receive a copy of the signal, and the study defines the non-relay nodes as listening nodes. The listening node receives the signals emitted by the surrounding nodes [20]. Referring to the research results of Chen G [3], the optimal relay node is determined by Equations (1)–(5). The expressions for the signals of each phase in cooperative communication are presented.
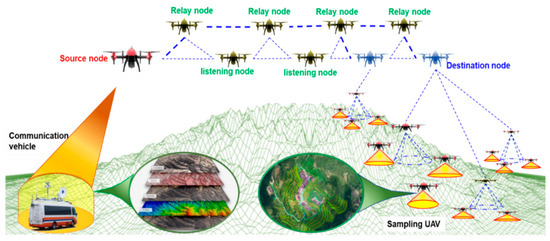
Figure 1.
Diagram of cooperative communication two-phase communication work.
Destination node receives signal
In the above two equations, the symbol y represents the receiving signal, the symbol h represents the channel gain of the communication link, and the symbol E is the energy consumed during the signal transmission. The symbol z is the expression of noise. The subscripts s,r,d represent the source node, relay node and destination node, respectively.
Relay node selection is a key technique for cooperative multi-node communication in reload requests. Since the distribution of nodes is random, the commonly used relay selection methods can no longer meet the demand of retransmission competition [21,22,23]. A novel relay selection algorithm is proposed to solve the problem of the increasing number of forwarding nodes, which are divided into different groups according to their spatial distribution [24]. Within the communication group, the best relay node is determined by a competition rule to be used to forward the signal. To improve the stability of the communication, the link quality is defined as the competition used to design the competition function. Since cooperative communication contains two phases of communication, the link quality consists of two links, the SR link and RD [25]. Considering the signal constraint, the minimum value of the channel quality of both links is defined as the whole link channel quality. Within the packet, the node with the largest link quality is defined as the best relay node and a link quality based maximum competition approach is determined. The designed relay competition rules are as follows.
During the broadcast of the signal by the source node of the cooperative communication, the surrounding nodes establish a communication link with the source node and the quality of the communication link is influenced by the link length [26], all nodes establish a communication link with the destination node and the channel quality is defined by the minimum disruption probability. Additionally, the two-channel communication quality is the smallest value of the two aforementioned links [27]. The definition qi represents the channel quality of the i-th link, and the value is determined jointly by the RS link and the RD link quality. The qi equation is calculated by the following equation.
A competition rule for the best relay node is defined. In multi-node packet communication, the control signal Wi for retransmission signals is generated by the competition rule. It is assumed that during a communication period T, the nodes within the group are timed as a decreasing function starting with Wi as the initial value, and when the value of Wi is zero, the node is determined to be the best relay node. Where, Wi denotes the probability that a communication link will be disrupted [28]. The competition rule is defined according to the magnitude of the probability of disruption in the link where the node is located. In this case, the best relay node broadcasts a signal, and the other nodes stop participating in the competition after receiving the signal [29]. The calculation of the weight Wi is performed using the following equation.
In the formula, λ is a constant with a value of 0.01 T, i = (1, 2, 3, ⋯, n).
A competition rule based on the maximum channel quality nested with the minimum link quality is determined. From the equation, the minimum link quality is a pre-work for solving the maximum channel quality [14,30]. The expression of the competition rule for the i-th node to be filtered is given below.
In the formula, R stands for maximum link information, i = (1, 2, 3, ⋯, n).
In the second phase of packet communication, the best relay node forwards the signal to the destination node. The destination node receives several relay signals at the same time. Multiple signal copies are aggregated into one signal by the maximum merge method [8]. If the merged signal can be successfully decoded by the destination node, the destination node transmits a feedback signal ACK to the relay node. The relay node signal forwarding is terminated [14]. If the merged signal cannot be successfully decoded, the destination node sends a signal NACK to the relay node, which continues to forward the signal to the destination node [30]. As the number of nodes increases, the probability of the relay-forwarded signal being successfully decoded gradually decreases, and the existing studies [14,31] have proved that the existing retransmission methods cannot meet the needs of multi-node cooperative communication. An idea based on the forwarding of signals by other nodes was designed to replace relay forwarding.
2.2. Listening Nodes Competing for Signal Retransmission
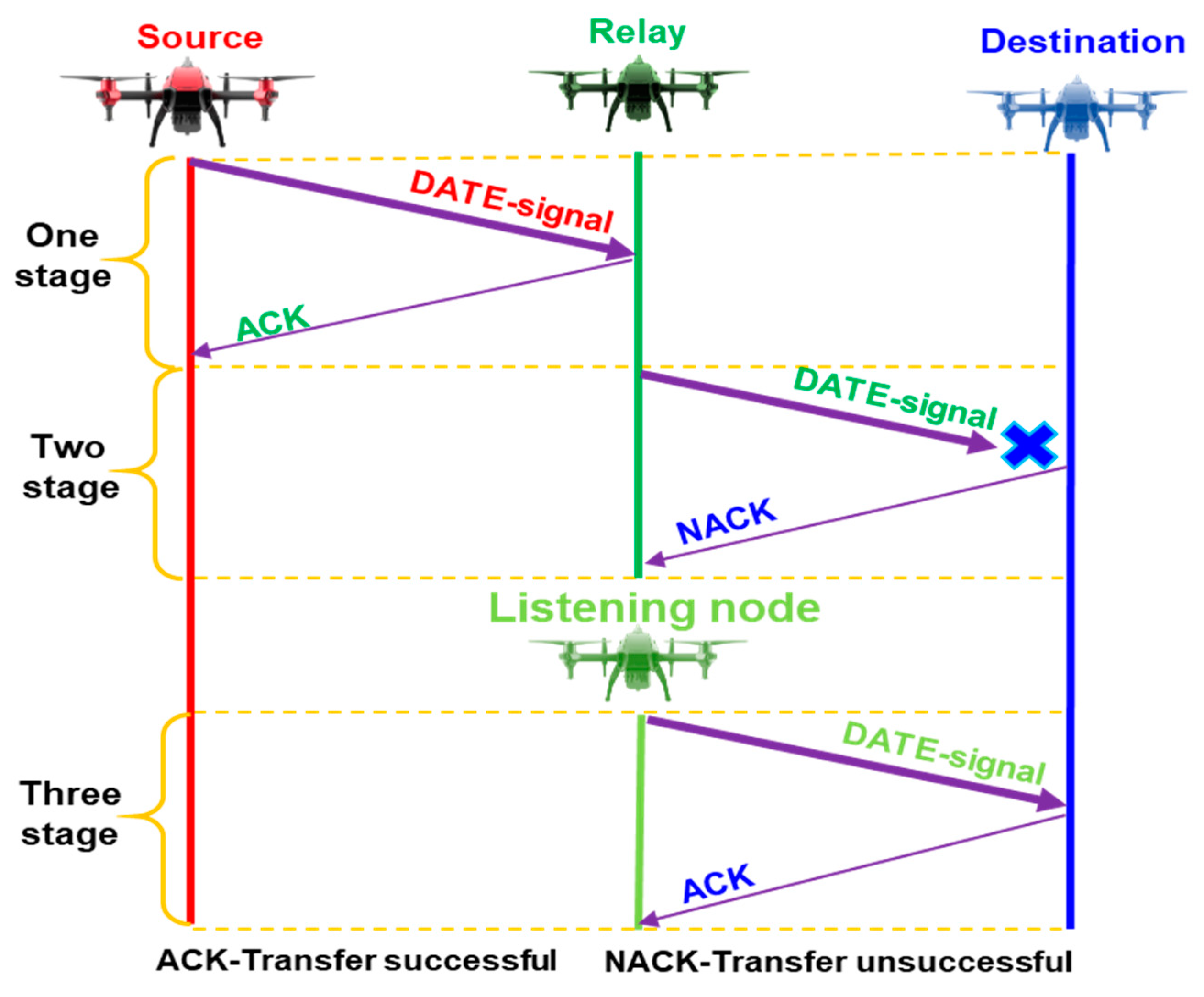
In the first stage of cooperative communication, the source node broadcasts a signal to the surrounding nodes, and other nodes, in addition to the best relay node, receive a copy of the signal as well. We define other nodes as listening nodes. During the second stage of forwarding the signal, the listening node also has the ability to retransmit the signal. Based on this, the listening node cooperative communication automatic retransmission request (LCARQ) policy is proposed. Figure 2 shows a schematic diagram of the process of retransmission involving the listening node. In the second stage of cooperative communication, after the relay node fails to forward the signal, the listener node sends the retransmission signal instead of the relay node. When the destination node sends the NACK signal, the relay node and the listener node determine the power needed for the signal to occur by competing. The process of retransmission competition is an innovative design and the competition process for retransmission power is a complex discussion process. The competitive power is determined by the channel quality of the node.
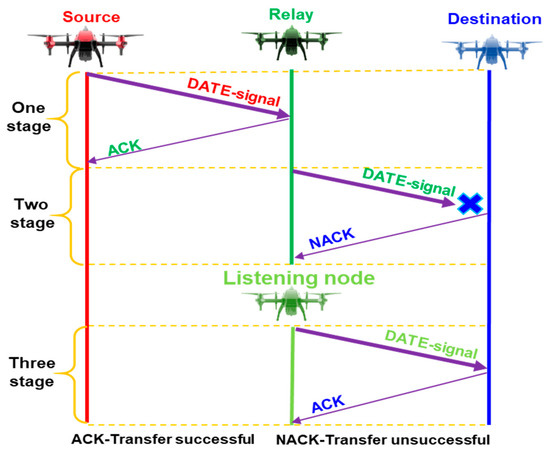
Figure 2.
Diagram of the retransmission request control policy based on listening nodes.
The automatic retransmission request policy based on listening nodes was determined based on different assumptions.
During the second stage of communication, if the RD channel quality of the listening node is less than the RD channel quality of the relay node, the retransmission signal is sent by the best relay node. It works in the same way as the signal-forwarding process of the cooperative communication. At this time, the node calculation process of signal retransmission can be obtained by the formula.
In the second stage of the retransmission process. A listening node is defined as a signaling retransmission node if the RD channel quality of the listening node is higher than the channel quality of the relay node. First, the RD communication link of the listening node is calculated and the listening node, whose value is greater than that of the relay node, is selected using the channel quality as an indicator. At least one listener node replaces the relay node. When all nodes with higher channel quality are selected, the forwarding nodes are identified in descending order. The defined forwarding node replaces the relay node to send a retransmission signal and the second phase of the cooperative communication ends.
In summary, the automatic request retransmission policy for cooperative communication based on listening nodes is defined as follows. The listening node sends a retransmission signal when the listening node in the communication has competing power. When the listening node in the communication does not have competing power, the best relay node forwards the signal. The conditions for the end of the retransmission process contain retransmission four times or the signal is successfully decoded. The competition theoretic payoff of LCARQ can be summarized as follows.
3. Automatic Retransmission Algorithm Strategy Based on Relay Listening Decoding
A cooperative automatic retransmission request policy algorithm based on listening nodes was designed. The best relay node was selected to compete through channel parameters, the maximum–minimum law is used to select the listener node to send the retransmission signal, and the listener node and the relay node determine the retransmission signal through competition. The signal transmission and retransmission process for cooperative communication designed is shown in Table 2. The evaluation metrics were calculated by subroutine calls. The algorithm symbol S denotes the source node, d deletes the destination node, ri denotes the i-th best relay node, and Li denotes the i-th best listener node. The detailed steps of the algorithm design were designed as shown in Table 2.
Table 2.
Improved algorithms of LCARQ.
4. Simulation Verification
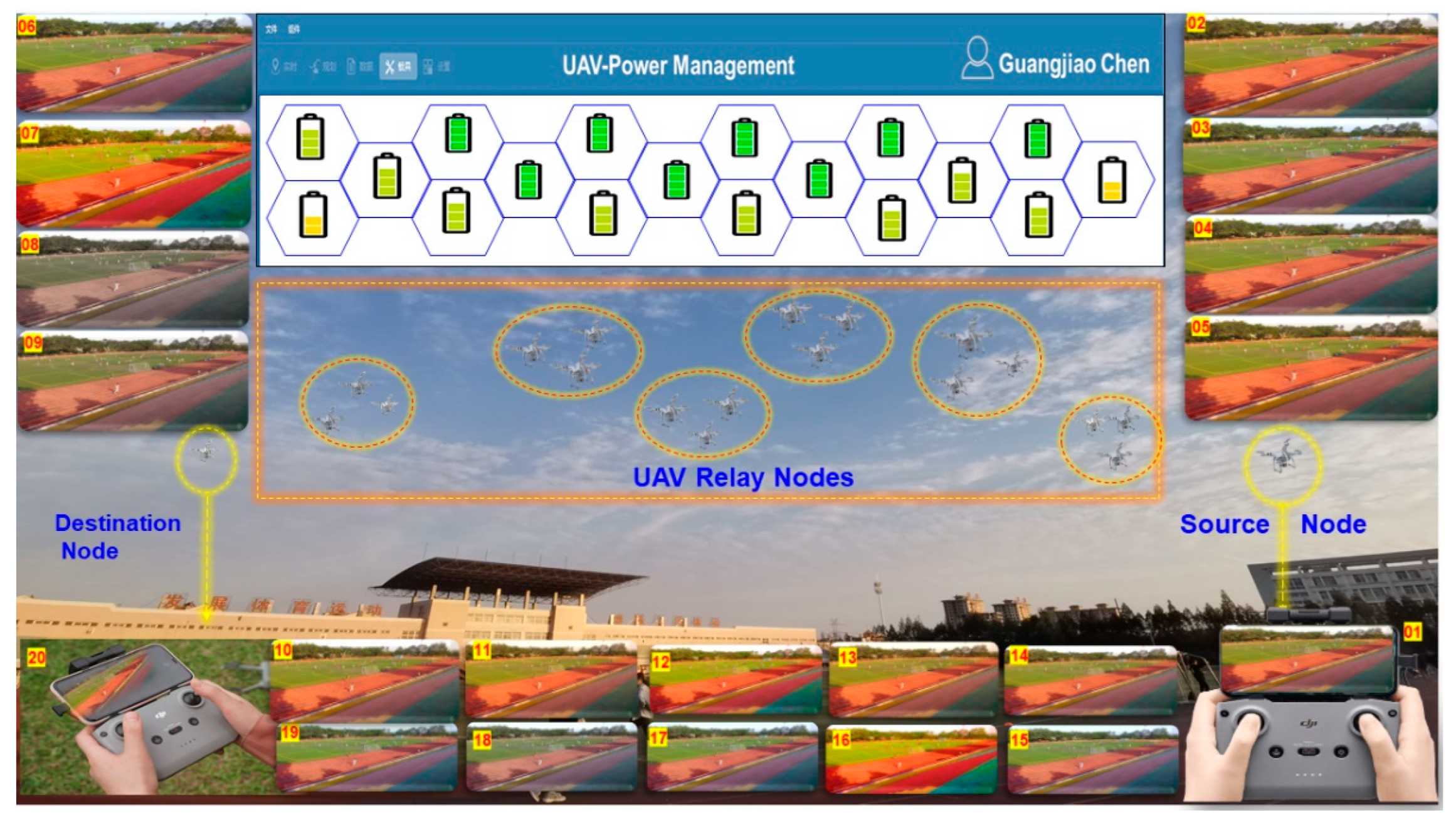
The performance of LCARQ was verified by a comprehensive experiment with simulations. Drone-networking cooperative communication tests were organized in the playground of the university before the simulation experiment. The measured data were used as parameters for the simulation. The colors of the 20 images of the playground in Figure 3 are different, which indicates that the images transmitted by the listening nodes can replace the relay nodes. The experiments were performed using the Matlab (2020b) software as a platform, the “bpsk” modulation mode was input [32], and the cooperative communication process was simulated, which could be repeated when the simulation was performed.
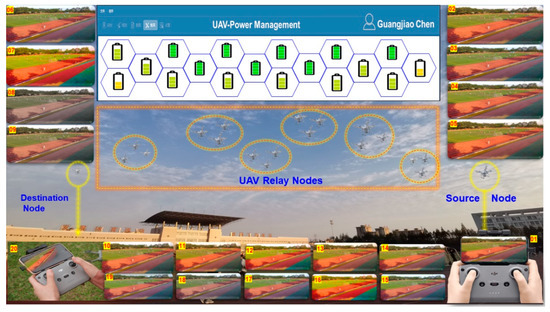
Figure 3.
Cooperative communication retransmission experimental test.
The simulation results were collected in Table 3. The experiment simulates a cooperative communication process with a common communication part in the first phase and different algorithms transmitting signals according to different strategies in the second phase of signal forwarding. The comparison method contains the improved algorithm LCARQ, the relay-node-based forwarding algorithm RCARQ and the dominant algorithm ORCARQ strategy. The experimental metrics contain BER, BER and the auto retransmission time of different algorithms, and the performance of the improved algorithms is analyzed. The performance of the improved algorithm and the comparison algorithm are calculated and the simulation results are compared to prove the practicality and innovation of the improved algorithm.
Table 3.
Experimental parameter setting.
4.1. False Bit Rate and False Packet Rate
Communication stability is the aim pursued by cooperative communication [27,33,34], retransmission signal is the key technique to improve stability. The two values of bit error rate and packet error rate are common parameters to evaluate the retransmission signal algorithm. In the retransmission process of cooperative communication, the above two parameters are calculated by the following equation.
Bit Error Rate (BER)
The multi-channel average node instantaneous signal-to-noise ratio (γ) in cooperative communication is calculated by the following equation [27]
In the formula, h indicates the channel gain of multiple links, Pu is the probability of the decoding error of the signal, N0 is a fixed value, the value is related to the logarithm of 2.
The decoding error probability in the multi-relay link retransmission is calculated, and the following equation is the expression for the calculation [33].
In the equation, s, r, d represent source node, relay node and destination node, respectively, s, r, and P denote the probability of error. P can be solved by the signal-to-noise ratio (γ). i = (1, 2, 3, ⋯, n).
Packet Error Rate (PER)
The calculation of the packet error rate requires a distribution calculation. According to the process of retransmitting signals in cooperative communication, first, the PER of the signal broadcast is calculated, then the PER of the signal forwarding is solved, and finally, the PER of the retransmission process is calculated.
The PER of the broadcast process is solved by the following equation [33].
In the formula, the BER symbol of the system is when PP, and the symbol of the node when the subscript is i = (1, 2, 3, ⋯, n).
The PER value of the relay node after forwarding the signal is solved by the following equation [34].
In the formula, f is the calculated coefficient of the signal-to-noise ratio, in this case, the exponential function i = (1, 2, 3, ⋯, n).
After a relay forwarding failure, the PER of the retransmission process is calculated by the following formula [34].
In the formula, F for maximum link information, i = (1, 2, 3, …, n).
In the formula, Ppi is the packet loss rate of the ith channel for which the solution It is the sum of multiple links formed by multiple relay nodes. i = (1, 2, 3, ⋯, n).
An experiment to calculate the parameter values according to the above formula was conducted. A comparative experiment on signal-to-noise ratio and BER was organized. The comparison algorithm contains LCARQ, RACRQ, ORCARQ and MOARQ. The simulation results are shown in Figure 1.
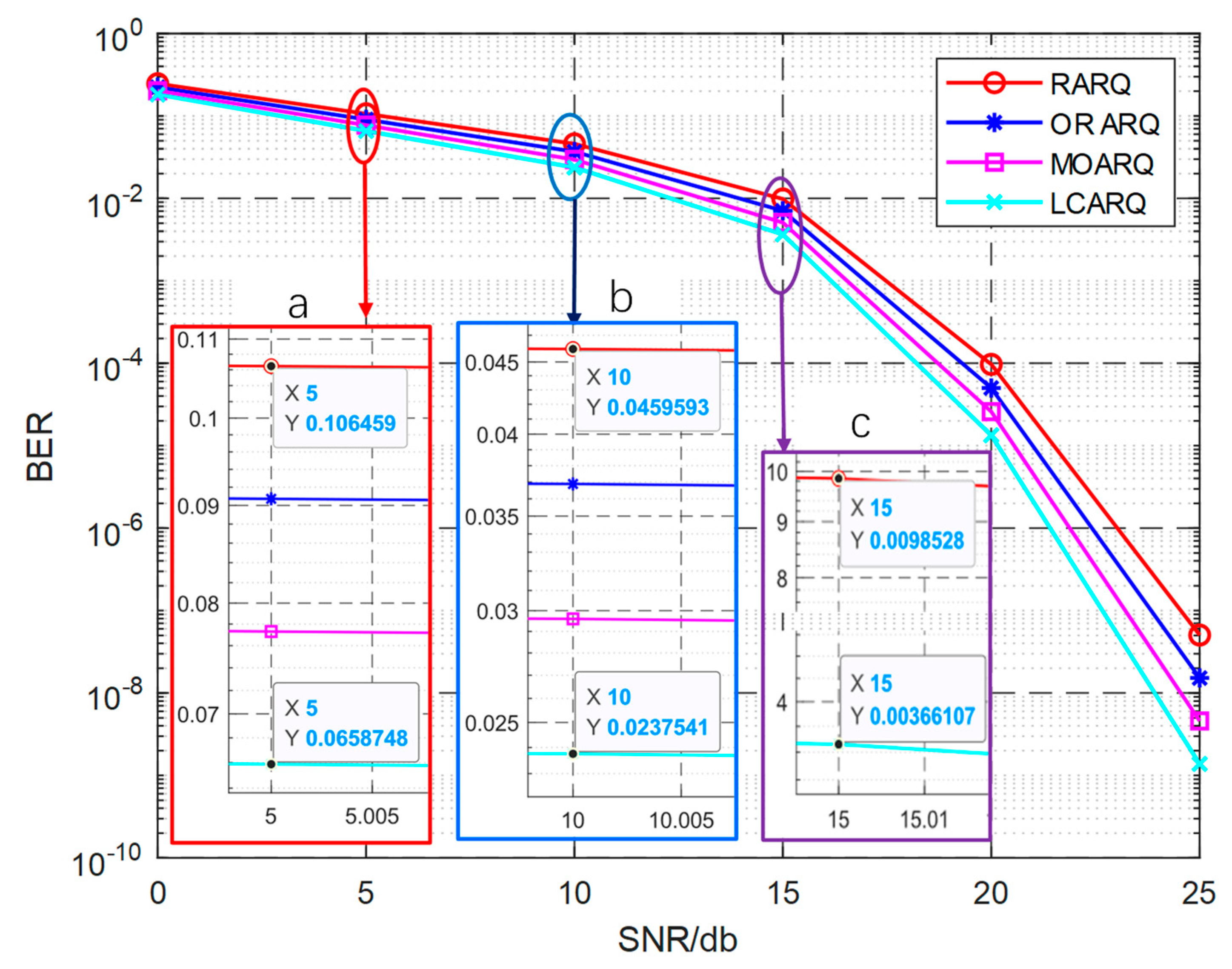
Figure 4 shows the BER simulation comparison of the four algorithms. The false bit rates of the four algorithms are simulated and calculated under different sig-nal-to-noise conditions. The four curves gradually decrease with increasing SNR, and the decrease values gradually increase for different SNRs. It can be seen that the BER of the signal is nonlinearly and negatively correlated with the BER during the signal retransmission. Because the coordinate system scales are different, the three numerical points are amplified. The difference between the signal-to-noise ratios of LCARQ and RARQ is 0.44 (0.106–0.066) can be seen in Figure 4a. The difference between the two decreases to 0.12 (0.046–0.0.024), seen in Figure 4b. The difference between the two de-creases to 0.06 (0.009–0.003) can be seen in Figure 4c. The three sets of data comparison differ in the comparison of the variability of different algorithms with the change of the signal-to-noise ratio (0.066–0.004) < (0.106–0.010). The results reflect that the change of the BER of the LCARQ algorithm is not significantly affected by the change of the signal-to-noise ratio. (0.06 < 0.09).
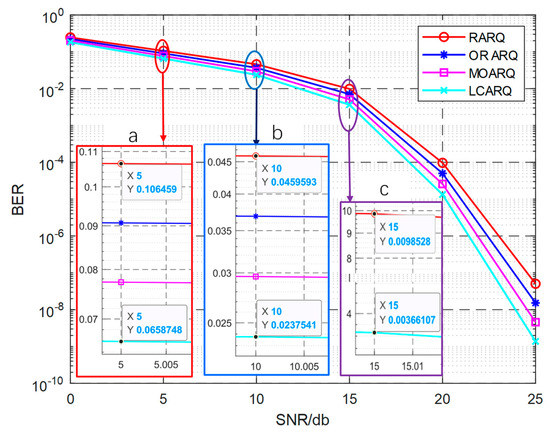
Figure 4.
Simulation comparison of packet error rate and bit error rate of the two algorithms. (a) BER amplification comparison with SNR of 5 db. (b) BER amplification comparison with SNR of 10 db. (c) BER amplification comparison with SNR of 15 db.
Another finding of the experiment is that the interference between signals is enhanced. This finding is different from the experimental results of the existing literature [12,15,21]. For example, when the SNR is 20 db, the BER values of the four algorithms are between 10−2 or 10−3, which is hardly sufficient for real communication. This result is caused by the fact that the signals of the collaborative communication are mainly sent in broadcast mode. The effect of interference between signals is enhanced and the probability of signal distortion becomes larger. Broadcast communication is a major drawback of radio communication and the variability of experimental results cannot be avoided.
4.2. Verification of the Number of Relay Nodes
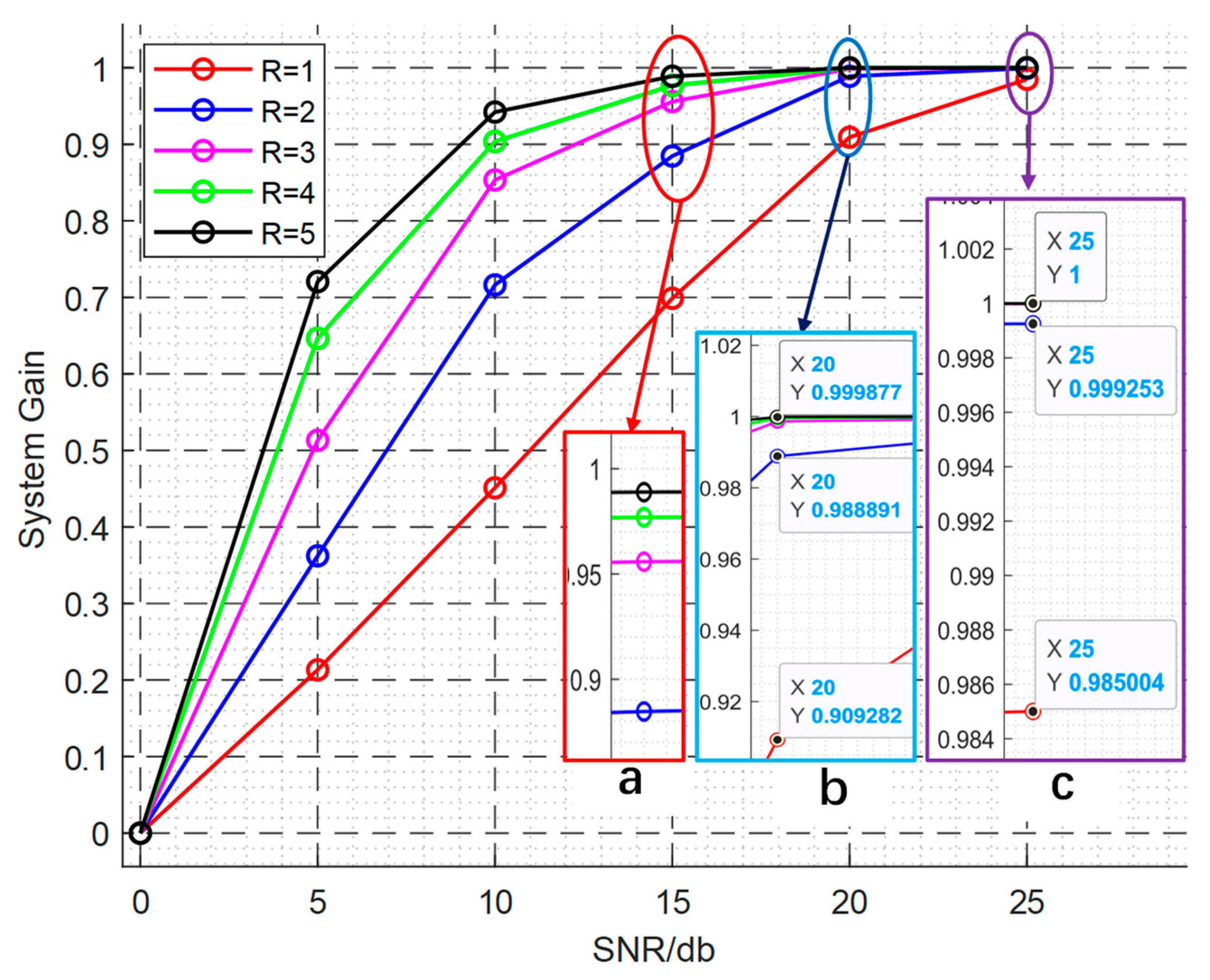
The average gain of a communication system is a direct indicator of the network communication throughput capability [34]. The system gain of a cooperative communication retransmission signal is the degree to which the received signal agrees with the transmitted signal. A comparative experiment on the number of relay nodes was organized to evaluate the cooperative average gain by. The input of the experiment is the number of relay nodes and the output of the system is the system gain consistency. The cooperative communication simulation process consists of three processes: signal broadcast, signal forwarding and signal retransmission. Figure 5 shows that as the signal-to-noise ratio increases, the system gain also increases. Since the difference of the system gain is gradually decreasing, the signal-to-noise ratio is nonlinearly and positively correlated with the system gain.
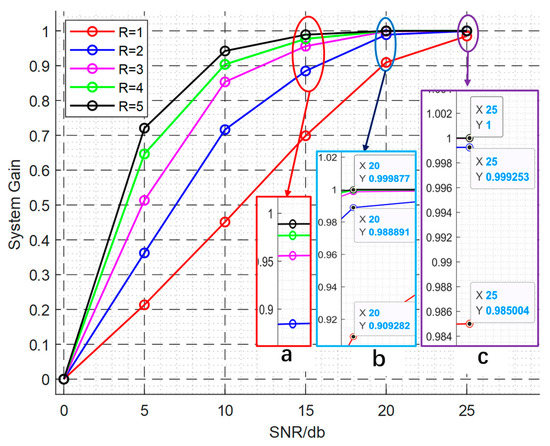
Figure 5.
Simulation comparison of system gain variation for different number of relay nodes. (a) Comparison of System Gain amplification with SNR of 15 db. (b) Comparison of System Gain amplification with SNR of 20 db. (c) Comparison of System Gain zoomed in with SNR of 25 db.
When the signal-to-noise ratio is 25 db, Figure 5c shows that the curves with relay nodes 1 and 2 fail to obtain the full system gain (0.999 and 0.998), and all other curves obtain the full gain. Additionally, when the signal-to-noise ratio is 20 db, Figure 5b shows that the curve fails to obtain the full system gain (0.999) when R is 3. When the signal-to-noise ratio is 15, the system gain is 0.99 times the amount of transmit signal gain when the relay node is 4 or 5. However, the two curves are very similar and the gain of the system does not increase much. Under the constraint of limited energy, four relay nodes transmit the signal with the maximum gain. The above conclusions are consistent with those of Refs. [34,35]. According to the conclusions of references [36,37], the total number of relay nodes and listening nodes cannot exceed five. Since the gain of the forwarding signal is greater than the gain of the retransmitted signal. It can be seen that there are at most three listener nodes and one relay node in coopera-tive communication. At this point, the gain of the communication system is maximum.
4.3. Simulation of Retransmission Signal Energy Consumption
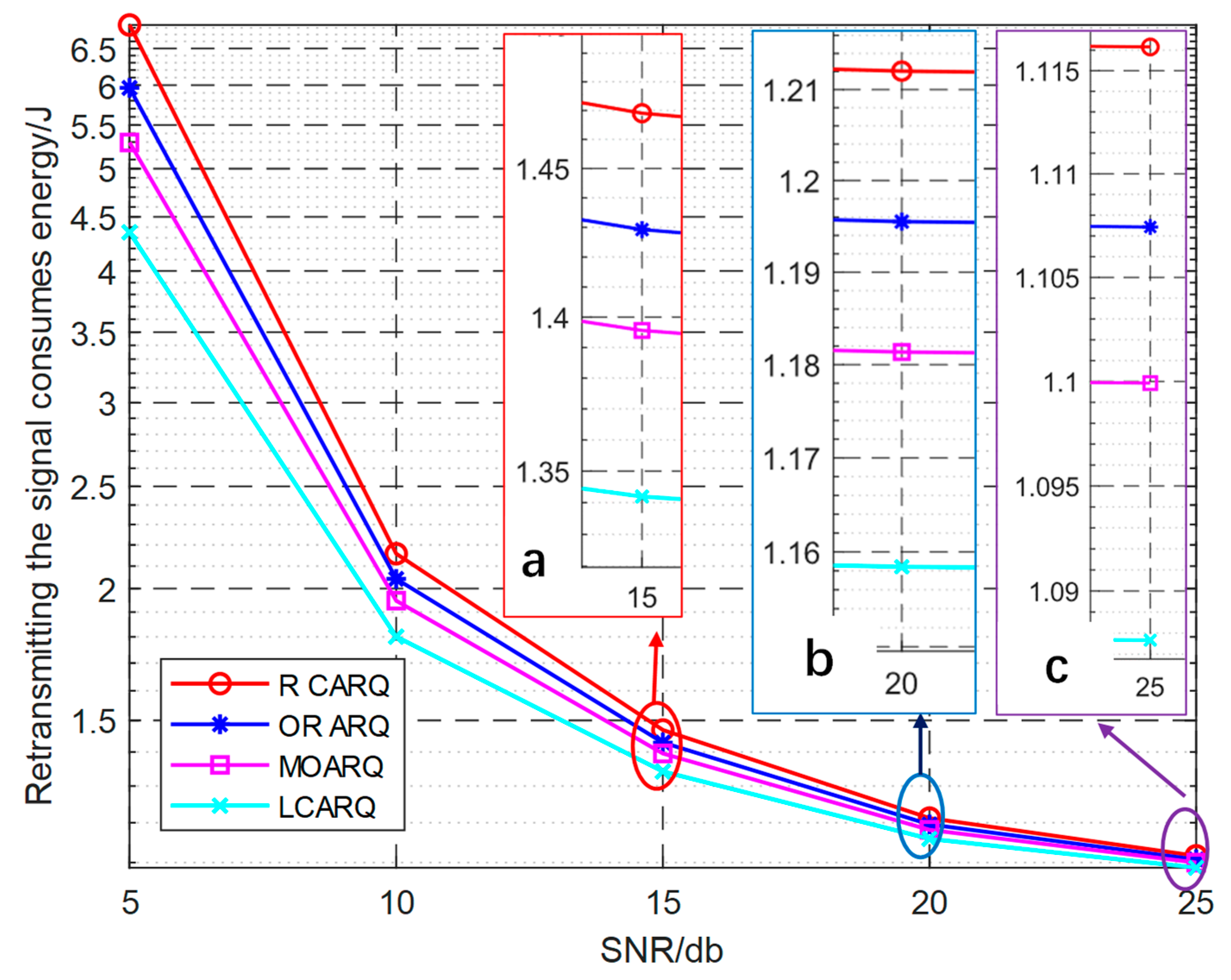
Energy consumption is a direct indicator for the evaluation of the automatic request retransmission strategy. So an experiment on algorithm energy consumption was designed [1,2,3,22,37,38,39,40]. The experiment was set up with the condition that four relay nodes and one listener node were involved in cooperative communication. The energy consumed by the four different algorithms was calculated; Figure 6 shows the relationship between the four algorithms’ energy consumption with the signal-to-noise ratio. When the signal-to-noise ratio is 5 db, the cooperative communication contains three phases, such as signal broadcast, signal forwarding and signal retransmission. Therefore, the collaborative communication consumes the excess energy of 4 J. As the signal-to-noise ratio increases, the four algorithms control the collaborative communication signal-forwarding work and the energy consumed by the system gradually decreases. In Table 3, it can be seen that because the total energy consumed by broadcasting and forwarding in communication is 1.255 J [39,40], the energy consumed by the system in Figure 6 is greater than 1.255 J. The system contains at least one retransmission signal. However, the number of retransmissions is reduced. As the signal-to-noise ratio continues to increase, the probability of the signal being accepted increases and the energy consumed by the system gradually decreases. Figure 6b shows that when the signal-to-noise ratio is higher than 20 db, the energy consumed is much less than four relays of the dedicated signal, which indicates that the higher the value of the signal-to-noise ratio, the lower the number of cooperative communication relays [40]. This conclusion is verified in Figure 6c. The energy of the improved algorithm is 1.004 J. This is because the number of nodes included in the cooperative communication is four (one relay, one source node, one destination node and one listener node, an average energy consumption of 1.255 × 4/5 J).
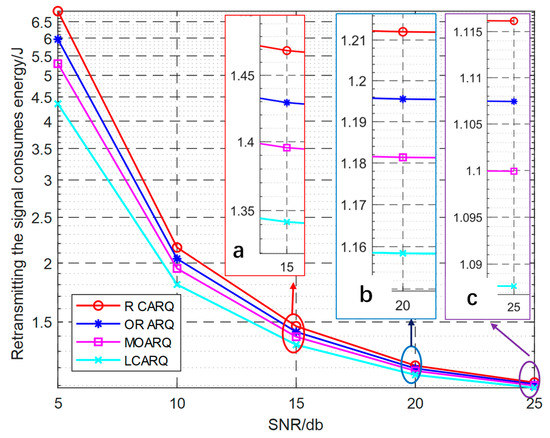
Figure 6.
Comparison of the energy consumption of the retransmission process for different algo-rithms. (a) Residual energy comparison with SNR of 15 db. (b) Residual energy comparison with SNR of 20 db. (c) Residual energy comparison with SNR of 25 db.
Energy consumption is the key factor affecting the quality of the communication service [34,36] when it is consumed. Since the LCARQ algorithm in Figure 1 consumes the least amount of energy, the system energy consumption is related to the signal-to-noise ratio, and when the signal-to-noise ratio is the same, the algorithm of LCARQ consumes the least amount of energy. The improved algorithm LCARQ has fewer retransmissions than the other three compared algorithms and consumes the least amount of energy for network communication. This indicates that the quality of service of the LCARQ communication has been improved.
The quality of communication services was evaluated by calculating the values of three indicators. The comparison of experimental results shows that the improved algorithm achieves the goal of low-power communication [3,17,35,36]. The BER, number of retransmission relays and energy consumption of various algorithms were calculated and compared under different signal-to-noise ratio conditions. The listening node sends the signal to reduce the value of BER and the energy consumption is also reduced. The experimental results show that the improved algorithm is not the best algorithm under the same conditions (because of interference), but the improved algorithm is the most practical in cooperative communication when considered together. The participation of listening nodes in cooperative communication reduces the energy consumed by communication and the control strategy improves the energy management model.
5. Conclusions
In order to reduce the number of retransmission signals for cooperative communication, an automatic retransmission strategy for cooperative communication based on the participation of listening nodes is proposed. In the second stage of cooperative communication, when the communication of a relay node fails, the listener node with better channel quality participates in the retransmission competition of the relay node. The probability of successful signal acceptance is improved, the system source node no longer participates in retransmission, and the system energy consumption is reduced. Experiments show that the LCARQ BER of the improved algorithm is reduced by a factor of 0.01. When the gain of the received signal is 0.99 times that of the transmitted signal, the energy consumed is saved by 0.1 J. Meanwhile, the configuration of four relay nodes and one listening node for collaborative communication is verified. In comparison with the existing literature [3,35,37,40], the proposed method reduces the energy consumption in cooperative communication.
Although the improved algorithm is able to meet the communication needs of scenarios such as large-scale UAVs, the proposed algorithm does not consider the impact after interference absorption. Therefore, in the future, the stability and robustness of the communication can be improved by conducting relevant research under policy-permitted conditions (Chinese policy prohibits the use of jamming sources by civilians). The existing experimental results show that the proposed algorithm can theoretically meet the requirements of industrial UAV cluster communication. The improved algorithm is highly innovative.
Author Contributions
G.C. (Guifen Chen): Conceptualization (lead); writing—original draft (lead); formal analysis (lead); writing—review and editing (equal). G.C. (Guangjiao Chen): software (lead); writing—review and editing (equal); methodology (lead); conceptualization (supporting); writing—original draft (supporting); writing—review and editing (equal). All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Open Research Fund from National “Thirteenth Five -Year Plan” Advance Research Program of China under Grant No. 6141B012826, National Natural Science Foundation of China under Grant No. 61540022, and the Special Project on Industrial Technology Research and Development of Jilin Province, Research on Self-organizing Network System of Unmanned Platform for Optoelectronic Composite Communication, Grant No. 2022C047-8.
Data Availability Statement
The data used to support the findings of this research are included within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Li, S.; Li, H.; Yang, Q.; Gaber, J. Hybrid Cooperative Spectrum Sharing Protocols Based on OMA and NOMA in Cognitive Radio Networks. Appl. Sci. 2022, 12, 12683. [Google Scholar] [CrossRef]
- He, J.; Li, J.; Zhu, X.; Xiong, S.; Chen, F. Design and Analysis of an Optical–Acoustic Cooperative Communication System for an Underwater Remote-Operated Vehicle. Appl. Sci. 2022, 12, 5533. [Google Scholar] [CrossRef]
- Chen, G.; Chen, G. A Method of Relay Node Selection for UAV Cluster Networks Based on Distance and Energy Constraints. Sustainability 2022, 14, 16089. [Google Scholar] [CrossRef]
- Shafique, T.; Abdelhady, A.M.; Amin, O.; Alouini, M.-S. Energy Efficiency, Spectral Efficiency and Delay Analysis for Selective ARQ Multichannel Systems. IEEE Trans. Green Commun. Netw. 2018, 2, 612–622. [Google Scholar] [CrossRef]
- Tseng, C.-K.; Wu, S.-H. Selective and Opportunistic AF Relaying for Cooperative ARQ: An MLSD Perspective. IEEE Trans. Commun. 2019, 67, 124–139. [Google Scholar] [CrossRef]
- Yu, Z.; Zhai, C.; Ni, W.; Wang, D. Non-Orthogonal Multiple Access with Cooperative Truncated ARQ and Relay Selection. IEEE Access 2019, 7, 56228–56243. [Google Scholar] [CrossRef]
- Rahman, A.A.; Kahar, M.N.M.; Din, W.I.S.W. Distance based thresholds for 2-tier relay nodes selection in WSN. Comput. Stand. Interfaces 2019, 66, 103359. [Google Scholar] [CrossRef]
- Kim, C.; Kim, S.-H.; No, J.-S. New GRP LDPC Codes for H-ARQ-IR Over the Block Fading Channel. IEEE Trans. Commun. 2020, 68, 6642–6656. [Google Scholar] [CrossRef]
- Xie, M.; Wang, Q.; Gong, J.; Ma, X. Age and Energy Analysis for LDPC Coded Status Update with and Without ARQ. IEEE Internet Things J. 2020, 7, 10388–10400. [Google Scholar] [CrossRef]
- Zhou, Y.; Qian, H.; Wang, Q.; Li, S. Performance Modeling Analysis of D-MSMR-CARQ with Relay Selection in Wireless Sensor Networks. Secur. Commun. Networks 2021, 2021, 5533926. [Google Scholar] [CrossRef]
- Sellami, N.; Siala, M. Semi-blind channel estimation based on modified CMA and unitary scrambling for massive MIMO systems. Telecommun. Syst. 2021, 79, 249–259. [Google Scholar] [CrossRef]
- Rafiee, M.; Sadeghi, R.; Imani, S.M.F. Multi-objective cooperative medium access control protocols in wireless Ad-Hoc networks. Wirel. Networks 2021, 27, 1913–1924. [Google Scholar] [CrossRef]
- Dou, Z.; Tian, J.; Yang, Q.; Yang, L. Design and Analysis of Cooperative Broadcast Scheme Based on Reliability in Mesh Network. Mob. Inf. Syst. 2021, 2021, 5554563. [Google Scholar] [CrossRef]
- Puducheri-Sundaravaradhan, S.; Fuja, T.E. Hybrid-ARQ Protocols Based on Tornado Codes for the Packet Erasure Channel. IEEE Trans. Commun. 2021, 69, 7139–7153. [Google Scholar] [CrossRef]
- Li, J.; Guo, Z.; Ma, H. Development of hybrid ARQ protocol for the quantum communication system on stabilizer codes. China Commun. 2021, 18, 40–48. [Google Scholar] [CrossRef]
- Verma, G.D.; Mathur, A.; Ai, Y.; Cheffena, M. Mixed Dual-Hop IRS-Assisted FSO-RF Communication System With H-ARQ Protocols. IEEE Commun. Lett. 2021, 26, 384–388. [Google Scholar] [CrossRef]
- Farag, M.M.; Ahmed, K.E. Aggregated CDMA Crossbar with Hybrid ARQ for NoCs. IEEE Access 2022, 10, 28206–28218. [Google Scholar] [CrossRef]
- He, Q.; Zhu, Y.; Zheng, P.; Hu, Y.; Schmeink, A. Multi-Device Low-Latency IoT Networks with Blind Retransmissions in the Finite Blocklength Regime. IEEE Trans. Veh. Technol. 2021, 70, 12782–12795. [Google Scholar] [CrossRef]
- Nikolic, T.R.; Nikolic, G.S.; Djordjevic, G.L. Distributed arbitration scheme for on-chip CDMA bus with dynamic codeword assignment. ETRI J. 2021, 43, 471–482. [Google Scholar] [CrossRef]
- Ahmed, A.; Al-Dweik, A.; Iraqi, Y.; Mukhtar, H.; Naeem, M.; Hossain, E. Hybrid Automatic Repeat Request (HARQ) in Wireless Communications Systems and Standards: A Contemporary Survey. IEEE Commun. Surv. Tutor. 2021, 23, 2711–2752. [Google Scholar] [CrossRef]
- Airod, F.E.; Chafnaji, H.; Yanikomeroglu, H. HARQ in Full-Duplex Relay-Assisted Transmissions for URLLC. IEEE Open J. Commun. Soc. 2021, 2, 409–422. [Google Scholar] [CrossRef]
- Nadeem, F.; Shirvanimoghaddam, M.; Li, Y.; Vucetic, B. Delay-Sensitive NOMA-HARQ for Short Packet Communications. Entropy 2021, 23, 880. [Google Scholar] [CrossRef]
- Nadeem, F.; Li, Y.; Vucetic, B.; Shirvanimoghaddam, M. Analysis and Optimization of HARQ for URLLC. In Proceedings of the 2021 IEEE Globecom Workshops (GC Wkshps), Madrid, Spain, 7–11 December 2021; IEEE: Piscataway, NJ, USA; pp. 1–6. [Google Scholar] [CrossRef]
- Khan, F.; Rehman, A.U.; Zhang, Y.; Mastorakis, S.; Song, H.; Jan, M.A.; Dev, K. A Secured and Reliable Continuous Transmission Scheme in Cognitive HARQ-Aided Internet of Things. IEEE Internet Things J. 2021, 8, 14835–14844. [Google Scholar] [CrossRef]
- Shah, S.W.H.; Rahman, M.M.U.; Mian, A.N.; Dobre, O.A.; Crowcroft, J. Effective Capacity Analysis of HARQ-Enabled D2D Communication in Multi-Tier Cellular Networks. IEEE Trans. Veh. Technol. 2021, 70, 9144–9159. [Google Scholar] [CrossRef]
- Nguyen, H.D.; Let, H.D.; Nguyen, C.T.; Pham, A.T. Throughput and Delay Performance of Cooperative HARQ in Satellite-HAP-Vehicle FSO Systems. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), Norman, OK, USA, 27–30 September 2021; IEEE: Piscatevi, NJ, USA; pp. 1–6. [Google Scholar] [CrossRef]
- Park, S. Kalman Filtering Based Combining for MIMO Systems with Hybrid ARQ. IEEE Trans. Signal Process. 2021, 69, 5250–5258. [Google Scholar] [CrossRef]
- Nada, F.A. Service Time Analysis of Go-Back-N ARQ Protocol. In International Conference on Advanced Machine Learning Technologies and Applications; Springer: Cham, Switzerland, 2021; pp. 559–569. [Google Scholar] [CrossRef]
- Chen, G.J.; Wang, Y.J.; Chen, G.F.; Gu, X.L. Research on the Improvement of Relay Selection Algorithm for Cooperative Communication in Cluster Network. In Proceedings of the 2021 International Conference on Electronic Information Engineering and Computer Science (EIECS), Changchun, China, 23–26 September 2021; IEEE: Piscatevi, NJ, USA; pp. 115–118. [Google Scholar] [CrossRef]
- Yu, H.; Joung, J. Secure IoT Communications Using HARQ-Based Beamforming for MISOSE Channels. IEEE Internet Things J. 2021, 8, 17211–17226. [Google Scholar] [CrossRef]
- Zhang, H.; Liao, Z.; Shi, Z.; Yang, G.; Dou, Q.; Ma, S. Performance Analysis of MIMO-HARQ Assisted V2V Communications with Keyhole Effect. IEEE Trans. Commun. 2022, 70, 3034–3046. [Google Scholar] [CrossRef]
- Kaythry, P.; Kishore, R.; Priyanka, V.N. Performance analysis of LT code-based HARQ error control in underwater acoustic sensor networks. J. Mar. Eng. Technol. 2022, 21, 54–64. [Google Scholar] [CrossRef]
- Radbord, A.; Harsini, J.S. Slow and fast adaptive modulation and coding for uplink massive MIMO systems with packet retransmission. IET Commun. 2022, 16, 915–928. [Google Scholar] [CrossRef]
- Shi, Z.; Zhang, H.; Wang, H.; Fu, Y.; Yang, G.; Ye, X.; Ma, S. Block Error Rate Analysis of Short-Packet Mobile-to-Mobile Communications Over Correlated Cascaded Fading Channels. IEEE Trans. Ven. Technol. 2022, 71, 4087–4101. [Google Scholar] [CrossRef]
- Jiang, P.; Wen, C.-K.; Jin, S.; Li, G.Y. Wireless Semantic Communications for Video Conferencing. IEEE J. Sel. Areas Commun. 2022, 41, 230–244. [Google Scholar] [CrossRef]
- Özgün, E.; Aygölü, Ü. Energy harvesting in ARQ-based cooperative broadcast and NOMA networks. Wirel. Netw. 2022, 28, 1–14. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. A Q-Learning-Based Topology-Aware Routing Protocol for Flying Ad Hoc Networks. IEEE Internet Things J. 2021, 9, 1985–2000. [Google Scholar] [CrossRef]
- Alam, M.M.; Arafat, M.Y.; Moh, S.; Shen, J. Topology control algorithms in multi-unmanned aerial vehicle networks: An extensive survey. J. Netw. Comput. Appl. 2022, 207, 103495. [Google Scholar] [CrossRef]
- Xuerui, Z.; Li, L. Topology Control Algorithm of UAV Networks based on Routing. In Proceedings of the 14th IEEE Conference on Industrial Electronics and Applications (ICIEA), Xi’an, China, 19–21 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 960–964. [Google Scholar] [CrossRef]
- Yoo, T.; Lee, S.; Yoo, K.; Kim, H. Reinforcement Learning Based Topology Control for UAV Networks. Sensors 2023, 23, 921. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).