Abstract
Vehicle-to-everything (V2X) in networks is a communication technology that allows vehicles to communicate with their surroundings. Traffic congestion and unawareness of the travel of emergency vehicles (EVs) lead to delays in reaching the destination of the EV. In order to overcome this time delay, we propose a jitter-to-highly reliable (J2H) approach of customizing the traffic signals and an alert passer mechanism to alert other vehicles. Once an EV is started, its source, destination and level of emergency will be updated on the network, and based on the traffic density, the fastest route to reach the destination is determined. The V2X system in the J2H approach passes an alert to all the traffic signals on that route. The traffic signals will continuously monitor the position of the vehicle by using the Global Positioning System (GPS). Based on the position of the vehicle, the distance between the vehicle and the traffic signal on that route is periodically updated. Once the vehicle comes within the range of the closest traffic signal, based on constraints such as number of lanes, emergency level, types of roads, traffic density, number of EVs approaching, and time of arrival of the vehicles, the traffic signal will be customized. The V2X then passes the information to all the traffic signals that are available in the route of the EV. The alert passer mechanism warns about the approaching EV to other vehicles on that route. Thus, by adapting the J2H technique, EVs can overcome the time delay to reach the destination. Traffic congestion is overcome by customizing the traffic signals. Path blockage can be cleared by vehicle-to-vehicle (V2V) communication.
1. Introduction
Vehicle-to-everything (V2X) provides the foundation for vehicles to communicate with each other and everything around them, providing 360° coverage for enhancing road safety and autonomous driving. V2X is an incumbent wireless communication type mainly used to increase road safety by preventing vehicular collisions. It can exchange information regarding road conditions, approaching vehicles, road accidents, and weather conditions wirelessly [1,2]. V2X comprises V2V (vehicle-to-vehicle), V2I (vehicle-to-infrastructure), V2P (vehicle-to-pedestrian), and V2N (vehicle-to-network) applications [3,4,5]. It also provides information about the navigation system in autonomous vehicles. It works efficiently in high-speed vehicle mobility and even in extreme weather conditions such as rain, fog, etc. [6,7,8]. By knowing the traffic information in advance using V2X, the vehicle can reach the destination easily [9]. Using 5G, V2X performance will increase by supporting mobile network operators due to the dynamic network’s availability [7]. It also has advantages such as longer range, low latency, high reliability, high throughput, wide-band ranging, and positioning.
Traffic congestion arises when the demand for roads exceeds its capacity. Traffic congestion often occurs in urban areas [10]. It will be even worse in peak hours in cities, as all are traveling to their workplace and schools. Governments have taken many control measures such as increasing public transportation, an odd–even license plate policy, and vehicle restrictions on several roads. However, all these measures are ineffective. Traffic congestion not only increases vehicle accidents but also increases emergency vehicle (EV) response time [11,12,13,14,15]. EVs play a crucial role in saving lives. When it comes to ambulances, it helps to reach the hospital in time, thus saving lives [15,16]. Likewise, fire engines help in rescuing people in buildings on fire, also saving lives. EVs need to make a quick trip to arrive to their objective to spare lives [17,18]. The cycle may become troublesome when the EVs stall out in rush hour gridlock or when different vehicles do not perceive the methodology of the EV. If the EV does not arrive to their objective at the right time, it might prompt life dangers. Likewise, non-EVs may be slammed because of quick-moving EVs [19]. To overcome such accidents, we use secure V2V communication to alert non-EVs about the approaching EV.
In the event that different vehicles know about the EV’s maneuver and if there is less traffic at the signals, the EVs can arrive to their objective on schedule. Since reaching the destination on time, it becomes much easier to save lives compared to reaching the destination later [20,21]. As the EV has traffic rule exemptions, it can pass through red lights, which increases the probability of accidents during heavy traffic [22,23]. In order to overcome the life loss within and outside of EVs during their movement, the movements have to be monitored and to control their traversing routes. By smarting traffic signals to monitor and control the flow of traffic and to change the sequence of signals, we can enhance EV movement.
We propose a jitter-to-highly reliable (J2H) approach of customizing the traffic signals and an alert passer mechanism to alert other vehicles. Once an EV is started, its source, destination and level of emergency will be updated on the network, and based on the traffic density, the fastest route to reach the destination is determined. The V2X system in the J2H approach passes an alert to all the traffic signals on that route. The traffic signals will continuously monitor the position of the vehicle by using the Global Positioning System (GPS). Based on the position of the vehicle, the distance between the vehicle and the traffic signal on that route is periodically updated. Once the vehicle comes within the range of the closest traffic signal, based on constraints such as number of lanes, emergency level, types of roads, traffic density, number of EVs approaching, and time of arrival of the vehicles, the traffic signal will be customized. The V2X then passes the information to all the traffic signals that are available along the route of the EV. The alert passer mechanism warns about the approaching EV to other vehicles on that route.
The remainder of this paper is organized as follows. In Section 2, we discuss some existing related works. The system model is introduced in Section 3, and then, it follows with our proposed solution in Section 4. Simulation results are presented to validate the performance of our proposed method in Section 5. Finally, this paper is concluded in Section 6.
2. Literature Survey
In [24], unmanned aerial vehicles (UAV) and deep-learning-based vehicle detecting, tracking, and counting systems showed more accuracy in traffic density calculations. The vehicle was detected with type identification based on deep learning and the number of vehicles counted. Using these data, their deep vehicle counting framework (DVCF) calculated the traffic density over that region. Dynamically flying UAV can record from the reverse side, which leads to a total collapse in traffic density estimation and to a drawback of this method. In [2], V2X communication with an energy-efficient relay-assisted transmission scheme in the uplink cellular networks for delay-insensitive applications was proposed. It maximizes the energy efficiency of the uplink considering both the circuit power and transmit power consumption. The optimal resource allocation policy satisfied the delay constraint and minimized energy consumption. The proposed system can achieve significant energy saving with less delay compared to the traditional direct scheme, the decoding-and-forward based transmission scheme, and the opportunistic store–carry and forward-based transmission scheme, especially when the cell radius is large.
In [25], using roadside units (RSU) and onboard units (OBU), V2I was established and then was able to find the nearby hospital and shortest route using GPS. A microcontroller inside the EV sends the information to the RSU. The RSU then customizes the intelligent traffic system (ITS) and transfers the information to the nearby RSU via ethernet, and information is removed from the current RSU. This follows until the EV reaches the determined nearby hospital. When more than one EV approaches a junction, it will customize more than one signal to the green light, leading to traffic congestion and accidents. This is a major drawback of this work. As discussed in [7], dedicated short-range communication (DSRC) usually refers to the wireless technology for automotive and ITS applications through short-range information exchange between different DSRC devices, such as OBU equipped in vehicles, RSU deployed as infrastructure, or a handheld device carried by a pedestrian. DSRC supports interoperable services between vehicles and infrastructure as well as between vehicles.
In [26], DSRC devices such as OBU and RSU provided wireless communication for ITS, and this wireless communication was achieved through reserved radio spectrum bands. Cellular technology uses a base station (BS) to broadcast the information to all vehicles in a wide range. The benefits of internetworking of both DSRC and cellular networks are that vehicular data can be backed up when the connection is broken while accessing the network and controlling message dissemination. DSRC and cellular technologies are subject to change; therefore, some limitations may vanish. This becomes a major disadvantage of this method. In [27], intelligent vehicle systems are designed for accident prevention, which include the collision warning system (CWS) and lane-keeping assistance (LKA). V2I communication is essential for reducing accidents by managing traffic situations. The AUTOPIA approach has been adapted for intelligent traffic management using V2I. An efficient algorithm that keeps each vehicle at a safe and comfortable distance and adjusts speed for avoiding collision and better traffic flow was developed. This proposed solution was obtained by an IEEE-802.11p-based communications study.
In [28], cooperative-ITS (C-ITS) utilized vehicular ad hoc networks (VANET) for inter-vehicle wireless communication and networking. Real-time relative positioning (RRP) provides a lane-level positioning accuracy using GPS, DSRC, and real-time kinematics (RTK). RRP provides a warning on the basis of information communicated using DSRC, which includes vehicle position, speed, and distance about every vehicle in that lane. This majorly helps in avoiding major accidents occurring due to collisions. Any malfunction of one or more subsystems of RRP may lead to accidents; this is the major disadvantage of this method. In [17], the integer linear program (ILP) gives information about the EV’s movement through a transportation link. After collecting the vehicle’s speed and location, ILP finds an intra-link path, and vehicles in that path will receive the emergency response vehicle’s (ERV) maneuvering instructions and a request to stop at its place. However, this system only works for a single ERV, which is a major disadvantage, as it fails to deal with multiple ERVs.
In [29], V2V safety applications are based on forward error correction (FEC) codes such as raptor Q. Their mobility model is used to update the position, speed and acceleration every 100 ms. They evaluated full-duplex operation for cellular V2V for safety broadcast. The system evaluated the comprehensive performance of V2V safety broadcast using cellular and IEEE 802.11p technologies. In [30], to alert other vehicles about the EV’s approach, exchanging of safety-related broadcast messages between vehicles occurred using V2V communication. These messages are sent periodically to announce each vehicle’s current state to other neighboring vehicles, and its performance is increased by a relaying system called relay-assisted enhanced V2V (RA-eV2V). As it is a 360° communication, we cannot say it is an alert coming only from the vehicle behind it. It is a major drawback of this paper.
An optimal transmission reliability enhancement mechanism (OTREM) was proposed in [31] for enhancing the emergency warning system through a cooperative driving strategy. OTREM improves the propagation of the warning messages and modifies the solution for the problems in the warning message transmission. In [32], adaptively changing the sequence of traffic signals based on the traffic density is obtained by using image processing on several road patterns. The server will collect these data and the control traffic lights. Contrast-limited adaptive histogram equalization (CLAHE) is used to reduce the noise in the image. Bilateral filtering is used to smooth the process by maintaining the structure of the image. A binary threshold converts the image into binary. The major disadvantage is that this system will not work at night or in bad weather conditions, and for calculating traffic density, it needs high-definition cameras.
In [9], decentralized environmental notification messages (DENM) help vehicles to notify an accident or other hazards on the road. Cellular vehicle-to-everything (C-V2X), characterizes the DENM latency and reliability performances. The conducted study does not work better in bad weather conditions, such as rain or storms, leading to a drawback. In [10], the congestion control protocol tests and validates any V2V-equipped vehicle with the J2945/1 standard. This system works even under heavy traffic congestion with 600 ms of inter-transmit time (ITT) so that a vehicle can be tracked accurately. As it is a 360° communication, we cannot say it is an alert only from the vehicle behind it. It is a major drawback of this paper. In [33], VANET is used to carry sensing data using DSRC. Multi-hop transmissions for gathering data to RSU in VANET have low data rates and long end-to-end delays. This problem is overcome by using a traffic-differentiated clustering routing (TDCR) mechanism in a software-defined network (SDN)-enabled hybrid vehicular network.
Overall, most of the existing solutions consider only the location of the vehicles or the distance of the vehicles in that location. Thus, considering the limited number of factor delays the EV in reaching the destination makes room for this research. Hence, in our proposed J2H approach, we considered additional factors such as the number of lanes, emergency level, types of roads, traffic density, number of EVs approaching, and time of arrival of the vehicles in real time for finding the best way for the EV to travel and reach the destination on-time. In J2H, the location of each EV is updated to the network. Once the EV is started, based on that, the alert passer mechanism alerts other vehicles and customizes the traffic signals. This enables the EVs to travel smoothly throughout the journey and helps in reaching the destination without delay.
3. System Model
Every traffic signal in an ITS has wheel speed sensors (WSS) at a certain distance away from them. It will count the number of vehicles crossing and their speed for a given period. These data will continuously be updated in the central server. Using these data, the server can predict the density of vehicles on all roads.
Prediction of the traffic density using vehicle speed is given in Equation (1).
where Vav is the average speed of n vehicles, Sk is the spot speed of the kth vehicle, and n is the number of vehicles crossing per unit of time.
Equation (2) is used to predict the time delay at each signal. The centralized server will find the path between the source and destination with a less than average time delay. The path will be sent back to the EV.
The information about the EV such as the EV’s ID, level of emergency, the destination address is given to all the traffic signals in that route. To alert the non-EVs, an alert is passed using V2V communication. Thus, the EV may receive a way to travel without path blockage.
V2V is a communication-technology-based wireless local area network (WLAN); thus, latency is a major factor in wireless communication. Latency can be either measured as round-trip time (RTT) or time to first byte (TTFB) [9].
The RTT of vehicle 1 is given in Equations (3) and (4).
where RTTv11 indicates the first round-trip time of vehicle 1, and RTTv12 indicates the second round-trip time of vehicle 1.
The RTT of vehicle 2 is given in Equations (5) and (6).
where RTTv21 indicates the first round-trip time of vehicle 2, and RTTv22 indicates the second round-trip time of vehicle 2.
Total average RTT is given by
The packet loss on the V2V communication is given by
Communication between two systems may often end in packet loss, which can be checked by checksum.
The EV’s position is periodically updated to all the traffic signals in that route. Once the EV comes within the range of the traffic signal, J2H customization of the traffic signals takes place. The traffic system will guide the traffic signal when to change to red or green color. After each EV crosses every signal, the information about that vehicle will be removed from the traffic signal. On reaching its destination, all the details about the EV will be removed from the centralized server.
4. Proposed Work
Once an EV is ready to start its travel, its source, destination, unique ID, and level of emergency are sent to the centralized server of that particular city. Figure 1 shows the architecture diagram of the J2H approach for emergency vehicles. The server will check for the EV’s ID in the database. If there is any match, the following process will take place; otherwise, the server will send an error to the EV. The centralized server uses the fastest path algorithm to calculate the route, which has less average density among all other possible routes to reach the destination. In Algorithm 1, the nodes are the traffic signals, and the edge weight is the traffic signal’s time delay. If the average speed is high, then traffic density will definitely be low, and if the average speed is low, then the traffic density will be high.
Figure 1.
Architecture diagram of J2H approach for emergency vehicles.
The average speed is calculated by placing a WSS at a distance of 250 m before each signal. The sensor’s controller is connected to its respective signal by an ethernet cable. As we are placed 250 m before the signal if the traffic congestion is high, the average speed will be low at that place (i.e., vehicles will be moving slowly, and thus, the density will be high). Using the average speed, time delay can be calculated by Equation (2).
If the time delay is high at that signal, we can assume that there is less traffic density, and if the time delay is low, then the traffic density is high. Thus, here, traffic density at each signal is inversely proportional to the average speed at its respective sensor. This value is sent to the centralized server by all the traffic systems. The centralized server will determine the fastest route by taking an average of the traffic densities in every possible route. The selected route will be directed to the EV.
The advantage of Algorithm 1 is to find the route that has less average density among all other possible routes to reach the destination. Algorithm 1 works based on Dijkstra’s algorithm, which is the best algorithm to find the shortest path from one node to every other node. The limitation of Algorithm 1 is that we must give a complete representation of the graph for finding the appropriate fastest path. In our proposed system, the centralized server will provide a global view of the road structure, which is used to find the shortest path.
The source is the starting node of the EV, the destination is the ending node of the EV, and the adjacent matrix represents the connection between the nodes.
| Algorithm 1: Fastest Path |
| Input:source, destination, adjacent matrix Output:fastest path Forvertex v in graph do distance[v] = ∞; end for distance[source] = 0; while !Queue.empty() do e = extract-min(Queue); for each neighboring nodes u near v do if distance[u] + distance between (u, v) < distance[v] then distance[v] = distance[u] + distance between(u, v); remove e from Q; end if end for end while ans = ∞ for d ε D do if distance[d] < ans then ans = distance[d]; next = d; end if end for return fastest route; |
All traffic signals continuously update the traffic density. Using these data, approximate estimated travel time through that road is calculated. The roads are considered as edges, junctions are as vertices, and the calculated time delay is represented as the weight of the edges. The fastest route algorithm will take the source and destination points and the adjacent matrix as input, and the output path has a minimum average travel time.
All the traffic signals in the selected route will receive EV information including destination, ID, and level of emergency. The position of the EV is continuously updated to these signals using GPS. After receiving the route from the server, the EV starts to travel. On this route, to alert other non-EVs, an alert about the approaching EV is passed through V2V communication.
V2V communication works in 360°, and it may receive an alert from the downstream vehicles. This will lead to confusion for the drivers. To ensure that the alert is only from the EVs behind them, the EV will send the lane ID and EV position in the alert. Thus, the confusion can be resolved. This alert passing mechanism is followed until the destination is reached.
In real time, the EV may not be able to complete its journey on time due to the heavy traffic scenarios. To avoid this, the proposed J2H approach considers various factors such as the number of lanes, emergency level, types of roads, traffic density, number of EVs approaching, and time of arrival of the vehicles. By considering all these factors, the fastest path to reach the destination is calculated, and the traffic signals in the traveling path are customized. The centralized controller used in J2H is responsible for updating the network if any instantaneous events happen, and the EVs receive the updated information through the backbone network. Thus, the proposed solution works optimally even under instantaneous events in real conditions.
Once the EV comes within range of the traffic signal (which is 250 m where the sensor is also placed), the information of the EVs (ID, level of emergency, destination address) is sent along with the time of arrival to the traffic system. This traffic system uses Algorithm 2 and guides when to customize the green light. The yellow light is converted in between because a sudden change to a red light may lead to a collision.
To overcome crashes, the yellow light is converted first before the red light. After converting all the signals in that junction to a red light, conversion of the green light in the selected signal will be performed. We customized all the other signals to a red light to handle some corner cases such as a U-turn or turning right or left. In addition, through V2V communication, all the non-EVs cannot move to the left lane, as there may be no space; thus, when switching to a green light only, the right lane vehicles should move. To ensure that only the light is customized because of the EV’s approach, in the timer display, an emergency symbol is displayed, and the timer will be paused. When the EV crosses every signal, information about that vehicle is removed from that signal, and the timer will be resumed. This process is followed until the destination is reached.
In the J2H algorithm, the traffic system will receive information on all the surrounding signals in that junction. If more than one EV enters at the same time, the vehicle that is closest to the traffic light will be given a way to cross the signal while the other signals will be customized to yellow and then to red. If more than one vehicle is closer to the traffic system, then the level of emergency also equals the maximum distance to reach the destination, which will be considered first. Figure 2 shows the flow of enhancing the alert systems for emergency vehicles in the J2H approach.
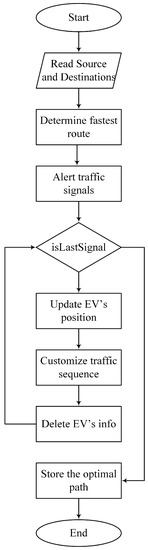
Figure 2.
Flow chart for enhancing the alert system for emergency vehicles in the J2H approach.
Algorithm 2 is used for customizing traffic signals based on the position of the EV. Using this algorithm, the EV can reach its destination without any road blockage and delay. Algorithm 2 is a heuristic algorithm, which is the best way to obtain a quick and effective solution. However, the heuristic algorithms may not provide the optimal solution. We used this algorithm for customizing the traffic signal, because in our scenario, we need a quick solution to customize the traffic signal rather than the optimal solution.
The proposed approach considers the emergency level as an important factor, which helps the network to differentiate between various emergency vehicles.
Phasing the traffic lights at intersections may affect the performance of the surrounding network. However, when enabling the EVs to have smooth travel to reach their destination on time without any delay for saving lives, the minimal deviations in the performance of the surrounding network can be negligible, as the passage of EVs is communicated with the non-emergency vehicles through V2V communication.
TL_id is the traffic light, EV is the EV, d is the distance between the emergency vehicle and traffic light, and lvl is the level of emergency.
| Algorithm 2: J2H algorithm for customizing traffic signals |
| Input: TL_id, EV, d, lvl Output: TL_id do: if queue is not empty then if more than one have same d then if more than one have equal lvl then Serve vehicle with longest destination else Serve vehicle with highest lvl end if else Serve vehicle with the smallest d end if else Follow normal sequence end if return ID of the EV to be given way |
5. Analysis and Discussions
The efficiency of the J2H scheme is evaluated by carrying out extensive simulations on SUMO and NS3. The SUMO simulation tool helps in modeling the mobility of vehicles, and the NS3 tool helps in simulating the network environment such as V2X. The main objective of the J2H approach is to effectively utilize the benefits of V2X communication by minimizing the traveling time of the EVs. We find the fastest route for EV based on the traffic density, which is more efficient than the shortest path algorithm, which can also predict the total travel time to reach the destination.
The J2H approach has the time complexity of O(ElogV), where E is the number of edges and V is vertices. Typically, V2V works at 360° and when passing an alert to the non-EVs. From the literature, we observed that it is not assured that the alert is only from the vehicle approaching behind it. We overcome this by assigning an identification number to the roads so that the vehicles will travel without confusion. Each road will have a unique ID, and while sending an alert, this ID is also included in the warnings even to the non-EVs.
We consider the same source and destination for both models, and the path is determined for the given information. Figure 3 denotes the route given by the shortest path algorithm, and Figure 4 denotes the fastest route given by our proposed algorithm based on traffic density. From Figure 4, we can infer that the selected path has less time delay than the path in Figure 3. From the figures, we can analyze that the waiting time at every traffic signal is less when compared to the existing model because our work does not need any intermediate such as RSU to communicate with a traffic signal and then to customize it. Instead, we use ITS, which itself contains a receiver and transmitter that receives the information about the EV and customizes the traffic signals on its own as a result of the waiting time at every traffic signal reducing gradually. Thus, the EV reaches its destination on time. Thus, J2H works more efficiently than the shortest path algorithm.
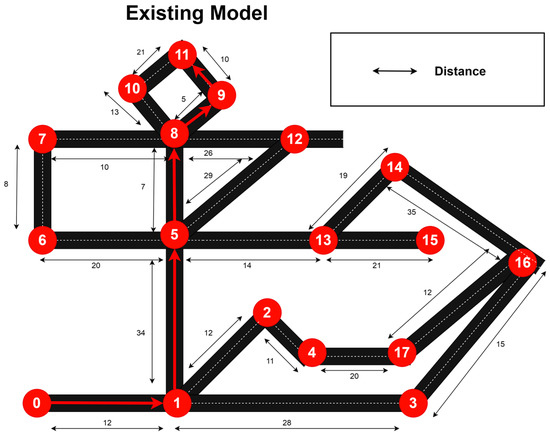
Figure 3.
The shortest path derived from the existing model.
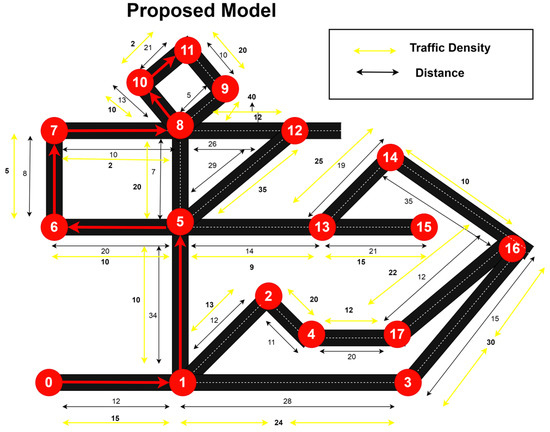
Figure 4.
The shortest path derived from the proposed model.
In traffic customization, our J2H algorithm will work efficiently, as every signal knows which way the EVs will come. To enhance their decision making, while more than one EV comes at the same time, J2H takes the decision based on constraints such as the distance between the vehicle and the signal, the level of emergency, and the distance between the signal and their destination. Thus, customization takes place easily. As a result of our work, the EV can reach its destination without any delay.
In order to evaluate the performance of the J2H approach, the extensive simulation results were compared with the OTREM and constant rate algorithm (CRA) approaches. The CRA approach transmits the warning messages at an invariant rate without any consideration of other factors. We simulated the approaches based on two major categories. One has low vehicular density and the other has high vehicular density. Figure 5 and Figure 6 refer to the transmission delay of the warning system when the road has a low vehicular density (n = 0 to n = 100) and high vehicular density (n = 0 to n = 500). From Figure 5, it is observed that the transmission delay of OTREM and CRA rises gradually until the density of vehicles reaches 30, yet the same for J2H does not have any sharp rising transmission delay. J2H reaches the maximum transmission delay of 0.003 s, when the number of vehicles reaches the maximum of 100. However, OTREM and CRA have 0.008 and 0.02 s, respectively. In the analysis of Figure 6, it is observed that with the increase in traffic density, all the approaches have comparatively higher transmission delay than with lower density. J2H has a lower rate of increasing delay until the number of vehicles is 150, after which the delay increases at a slightly higher speed and reaches a maximum delay of 0.013 s. On the other hand, the OTREM has a delay of 0.015 s, and CRA has 0.025 s.
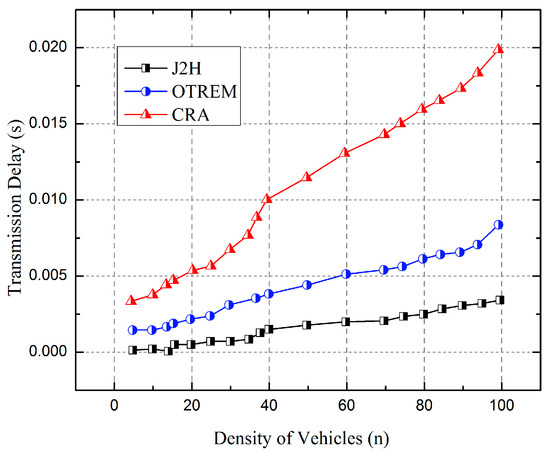
Figure 5.
Analysis of transmission delay in transmitting alert messages with low density of vehicles.
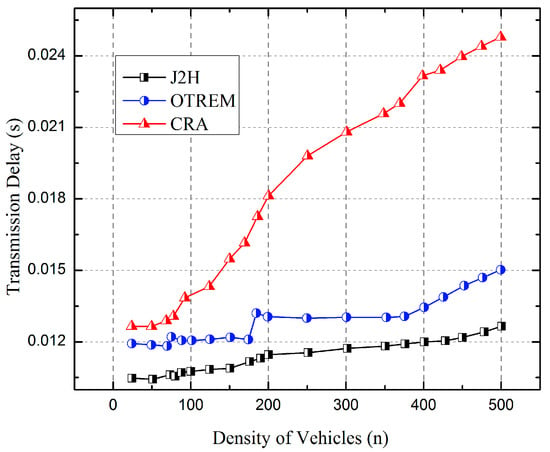
Figure 6.
Analysis of transmission delay in transmitting alert messages with high density of vehicles.
In order to estimate the constant rate of transmission delay, we simulated the approaches five times, each with a low density and high density of vehicles, and the results are plotted in Figure 7 and Figure 8. On the analysis of maximum transmission delay, it is observed that both the J2H and OTREM approaches have a similar rate of increase in the transmission delay, whereas the CRA possesses an extremely high transmission delay versus the J2H and OTREM approaches. From Figure 7, it is observed that the J2H possesses a maximum transmission delay of 0.01 s, and OTREM has 0.03 s. However, the CRA approach has a maximum of 0.35 s. Similarly, from Figure 8, when the density of vehicles reaches a maximum of 500 vehicles, the approaches J2H and OTREM have maximum transmission delays of 0.05 and 0.07 s, respectively. However, the CRA approach reaches 0.35 s when the number of vehicles is 80. The reason behind the efficiency of J2H is that the traffic density at traffic signals following normal signal sequence is considerably higher when compared to traffic density at traffic signals using our J2H approach of signal customization at the time of EV approach. This is because knowing the EV movement in prior J2H will customize the traffic signal in such a way to minimize the traffic density in the EV route.
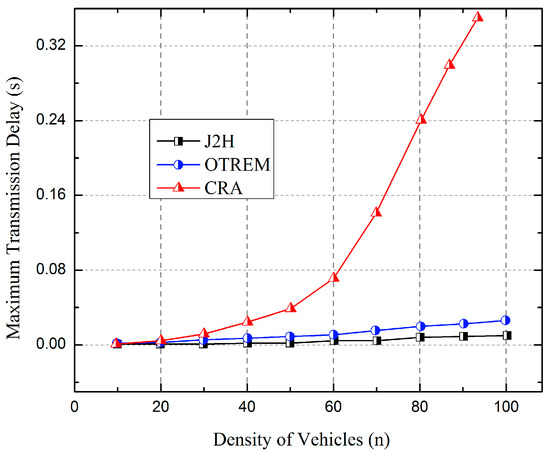
Figure 7.
Analysis of maximum transmission delay in transmitting alert messages with low density of vehicles.
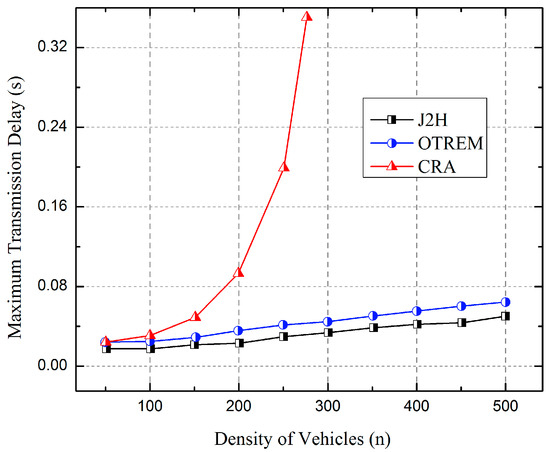
Figure 8.
Analysis of maximum transmission delay in transmitting alert messages with high density of vehicles.
The number of alert packets transmitted in the J2H approach when time changes is plotted in Figure 9 for the conditions with high traffic density and low traffic density. When the network has a high density of vehicles, the J2H approach transmits a maximum of 65 data packets, whereas with low density of vehicles, the J2H approach transmits a maximum of 80 data packets. This is because the usage of V2V for alert passing and J2H for customizing the traffic signals helps in reducing traffic congestion, thereby decreasing traffic density. Thus, from the above graphs, we can analyze the traffic density at each signal, and the alert packets are then transmitted accordingly.
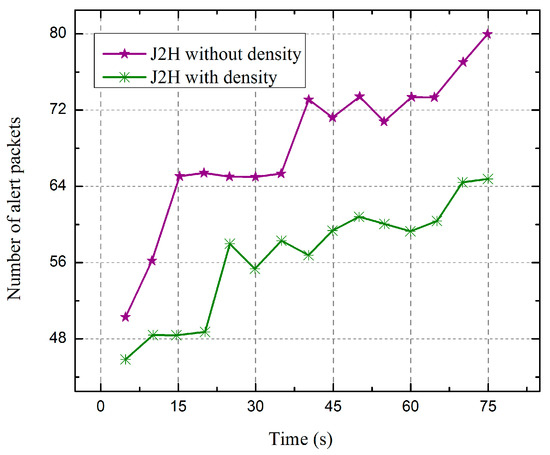
Figure 9.
Analysis of the number of alert packets transmitted in J2H approach when time changes with low density and high density of vehicles.
The comparative analysis of throughput for the approaches J2H, OTREM, and CRA is plotted in Figure 10. From Figure 10, it is observed that the J2H approach has higher throughput than the OTREM and CRA. When it is 75 s, the throughput of J2H, OTREM, and CRA reaches 4600, 410, and 2250 Kbps, respectively. As, J2H uses ITS, which does not require any intermediate RSU, the response time for customizing the traffic signals will be low. RSU has a high processing time, resulting in a high response time from the traffic signals.
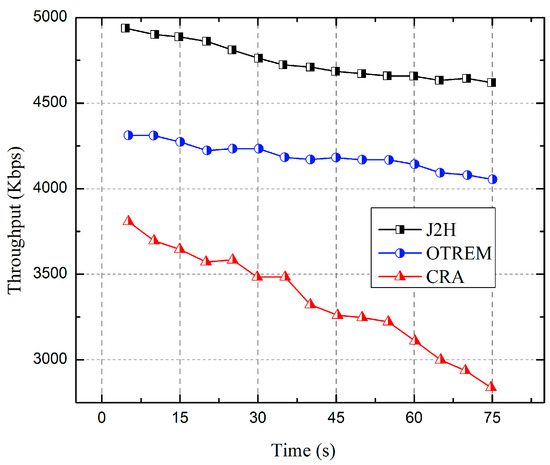
Figure 10.
Analysis of throughput when time changes.
Thus, from the overall analysis, we can observe that the proposed J2H approach has higher efficiency in the dissemination of warning data packets and optimizes the path of EV to travel. In this way, the EVs can overcome the time delay to reach the destination by choosing the fastest route based on traffic density. Traffic congestion is overcome by customizing the traffic signals, and the path blockage can be cleared by V2V communication.
6. Conclusions
Our proposed work will help EVs to overcome the time delay in reaching the destination by finding the fastest route based on the traffic density of every ITS that is continuously updated to a centralized server and updates the interworking of DSRC and cellular network technologies. When the ITS is within a close range, DSRC can be used in long-range 4G-LTE to overcome the limitations of both DSRC and 4G-LTE. Traffic congestion is overcome by customizing each traffic signal using J2H and by updating it to the next traffic signal. Path blockage can be cleared by V2V communication. Thus, the EV can maneuver smoothly and reach the destination without any delay, thereby saving lives. The results obtained show that the proposed J2H approach performed well in terms of transmitting the alert messages in high traffic density with a delay of 0.013 s, and with a 0.003 s delay in the low traffic density scenarios when compared with the existing systems. In terms of throughput, J2H has 32% higher throughput than the existing solutions. Thus, the proposed solution moves from a jitter to a highly reliable solution for the EVs in the ITS.
Author Contributions
Conceptualization, K.S.A.; methodology, R.S.M. and S.B.P; writing—original draft preparation, K.S.A.; validation, S.B. and M.R.; formal analysis, A.D. and R.S.M.; writing—review and editing, S.B. and M.R; supervision, S.B.P.; funding acquisition, S.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research is supported by Princess Nourah bint Abdulrahman University Researchers Supporting Project number (PNURSP2023R195), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data in this research paper will be shared upon request to the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Arikumar, K.S.; Kumar, A.D.; Gowtham, C.; Prathiba, S.B. A Software-Defined Collaborative Communication Model for UAV-Assisted VANETs. In Proceedings of the International Conference on Paradigms of Communication, Computing and Data Sciences, Jaipur, India, 5–7 July 2022; pp. 191–202, ISBN 9789811657467. [Google Scholar]
- Zheng, C.; Feng, D.; Zhang, S.; Xia, X.-G.; Qian, G.; Li, G.Y. Energy Efficient V2X-Enabled Communications in Cellular Networks. IEEE Trans. Veh. Technol. 2019, 68, 554–564. [Google Scholar] [CrossRef]
- Prathiba, S.B.; Raja, G.; Anbalagan, S.; Arikumar, K.S.; Gurumoorthy, S.; Dev, K. A Hybrid Deep Sensor Anomaly Detection for Autonomous Vehicles in 6G-V2X Environment. IEEE Trans. Netw. Sci. Eng. 2022, 1–10. [Google Scholar] [CrossRef]
- Prathiba, S.B.; Raja, G.; Dev, K.; Kumar, N.; Guizani, M. A Hybrid Deep Reinforcement Learning For Autonomous Vehicles Smart-Platooning. IEEE Trans. Veh. Technol. 2021, 70, 13340–13350. [Google Scholar] [CrossRef]
- Ouamna, H.; Zhour, M.; Younes, Z. 6G and V2X Communications: Applications, Features, and Challenges. In Proceedings of the 2022 8th International Conference on Optimization and Applications (ICOA), Genoa, Italy, 6–7 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]
- Prathiba, S.B.; Raja, G.; Bashir, A.K.; AlZubi, A.A.; Gupta, B. SDN-Assisted Safety Message Dissemination Framework for Vehicular Critical Energy Infrastructure. IEEE Trans. Ind. Inf. 2022, 18, 3510–3518. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, W.; Chen, J.; Wang, W. Evolutionary V2X Technologies Toward the Internet of Vehicles: Challenges and Opportunities. Proc. IEEE 2020, 108, 308–323. [Google Scholar] [CrossRef]
- Arikumar, K.S.; Deepak Kumar, A.; Gadekallu, T.R.; Prathiba, S.B.; Tamilarasi, K. Real-Time 3D Object Detection and Classification in Autonomous Driving Environment Using 3D LiDAR and Camera Sensors. Electronics 2022, 11, 4203. [Google Scholar] [CrossRef]
- Campolo, C.; Molinaro, A.; Berthet, A.O.; Vinel, A. On Latency and Reliability of Road Hazard Warnings Over the Cellular V2X Sidelink Interface. IEEE Commun. Lett. 2019, 23, 2135–2138. [Google Scholar] [CrossRef]
- Ahmad, S.A.; Hajisami, A.; Krishnan, H.; Ahmed-Zaid, F.; Moradi-Pari, E. V2V System Congestion Control Validation and Performance. IEEE Trans. Veh. Technol. 2019, 68, 2102–2110. [Google Scholar] [CrossRef]
- Wang, R.; Xu, Z.; Zhao, X.; Hu, J. V2V-based Method for the Detection of Road Traffic Congestion. IET Intell. Transp. Syst. 2019, 13, 880–885. [Google Scholar] [CrossRef]
- Prathiba, S.B.; Raja, G.; Kumar, N. Intelligent Cooperative Collision Avoidance at Overtaking and Lane Changing Maneuver in 6G-V2X Communications. IEEE Trans. Veh. Technol. 2022, 71, 112–122. [Google Scholar] [CrossRef]
- Zhou, H.; Hirasawa, K. Traffic Density Prediction with Time-Related Data Mining Using Genetic Network Programming. Comput. J. 2014, 57, 1395–1414. [Google Scholar] [CrossRef]
- Hui, Y.; Su, Z.; Luan, T.H.; Cai, J. Content in Motion: An Edge Computing Based Relay Scheme for Content Dissemination in Urban Vehicular Networks. IEEE Trans. Intell. Transport. Syst. 2019, 20, 3115–3128. [Google Scholar] [CrossRef]
- Mahajan, M.M.; Vijayakumar, V. Emergency Message Dissemination in Vehicular Ad-Hoc Networks Using Vehicle Movement Prediction. In Proceedings of the 2017 International Conference on Computing, Communication, Control and Automation (ICCUBEA), Pune, India, 17–18 August 2017; pp. 1–4. [Google Scholar]
- Shaghaghi, E.; Jalooli, A.; Aboki, R.; Marefat, A.; Noor, R.M. Intelligent Traffic Signal Control for Urban Central Using Vehicular Ad-Hoc Network. In Proceedings of the 2014 IEEE Asia Pacific Conference on Wireless and Mobile, Bali, Indonesia, 28–30 August 2014; pp. 281–286. [Google Scholar]
- Hannoun, G.J.; Murray-Tuite, P.; Heaslip, K.; Chantem, T. Facilitating Emergency Response Vehicles’ Movement Through a Road Segment in a Connected Vehicle Environment. IEEE Trans. Intell. Transport. Syst. 2019, 20, 3546–3557. [Google Scholar] [CrossRef]
- Jameel, F.; Javed, M.A.; Ngo, D.T. Performance Analysis of Cooperative V2V and V2I Communications Under Correlated Fading. IEEE Trans. Intell. Transport. Syst. 2020, 21, 3476–3484. [Google Scholar] [CrossRef]
- Ahmed, K.J.; Lee, M.J. Secure LTE-Based V2X Service. IEEE Internet Things J. 2018, 5, 3724–3732. [Google Scholar] [CrossRef]
- Raiyn, J. Road Intersection Intelligent Traffic Management Based on V2V Wireless Communication. In Proceedings of the 2019 IEEE International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, India, 20–22 February 2019; pp. 1–6. [Google Scholar]
- Bouderba, S.I.; Moussa, N. Impact of Green Wave Traffic Light System on V2V Communications. In Proceedings of the 2018 6th International Conference on Wireless Networks and Mobile Communications (WINCOM), Marrakesh, Morocco, 16–19 October 2018; pp. 1–6. [Google Scholar]
- Sun, R.; Matolak, D.W.; Liu, P. 5-GHz V2V Channel Characteristics for Parking Garages. IEEE Trans. Veh. Technol. 2016, 66, 3538–3547. [Google Scholar] [CrossRef]
- Qi, W.; Landfeldt, B.; Song, Q.; Guo, L.; Jamalipour, A. Traffic Differentiated Clustering Routing in DSRC and C-V2X Hybrid Vehicular Networks. IEEE Trans. Veh. Technol. 2020, 69, 7723–7734. [Google Scholar] [CrossRef]
- Zhu, J.; Sun, K.; Jia, S.; Li, Q.; Hou, X.; Lin, W.; Liu, B.; Qiu, G. Urban Traffic Density Estimation Based on Ultrahigh-Resolution UAV Video and Deep Neural Network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4968–4981. [Google Scholar] [CrossRef]
- Shaamili, R.; Ranjith, R.; Supriya, P. Intelligent Traffic Light System for Unhampered Mobility of Emergency Vehicles. In Proceedings of the 2018 Second International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 14–15 June 2018; pp. 360–363. [Google Scholar]
- Abboud, K.; Omar, H.A.; Zhuang, W. Interworking of DSRC and Cellular Network Technologies for V2X Communications: A Survey. IEEE Trans. Veh. Technol. 2016, 65, 9457–9470. [Google Scholar] [CrossRef]
- Milanes, V.; Villagra, J.; Godoy, J.; Simo, J.; Perez, J.; Onieva, E. An Intelligent V2I-Based Traffic Management System. IEEE Trans. Intell. Transport. Syst. 2012, 13, 49–58. [Google Scholar] [CrossRef]
- Ansari, K.; Feng, Y.; Tang, M. A Runtime Integrity Monitoring Framework for Real-Time Relative Positioning Systems Based on GPS and DSRC. IEEE Trans. Intell. Transport. Syst. 2014, 16, 980–992. [Google Scholar] [CrossRef]
- Thota, J.; Abdullah, N.F.; Doufexi, A.; Armour, S. V2V for Vehicular Safety Applications. IEEE Trans. Intell. Transport. Syst. 2020, 21, 2571–2585. [Google Scholar] [CrossRef]
- Park, S.; Kim, B.; Yoon, H.; Choi, S. RA-EV2V: Relaying Systems for LTE-V2V Communications. J. Commun. Netw. 2018, 20, 396–405. [Google Scholar] [CrossRef]
- Zhao, H.; Yue, H.; Gu, T.; Li, W. CPS-Based Reliability Enhancement Mechanism for Vehicular Emergency Warning System. Int. J. ITS Res. 2019, 17, 232–241. [Google Scholar] [CrossRef]
- Pratama, B.; Christanto, J.; Hadyantama, M.T.; Muis, A. Adaptive Traffic Lights through Traffic Density Calculation on Road Pattern. In Proceedings of the 2018 International Conference on Applied Science and Technology (iCAST), Manado, Indonesia, 26–27 October 2018; pp. 82–86. [Google Scholar]
- Kim, T.; Park, Y.; Kim, H.; Hong, D. Cooperative Superposed Transmission in Cellular-Based V2V Systems. IEEE Trans. Veh. Technol. 2019, 68, 11888–11901. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).