
Review of Soft Actuators Controlled with Electrical Stimuli: IPMC, DEAP, and MRE




Abstract
1. Introduction
2. Recent Progress in Development and Applications of Soft Actuators
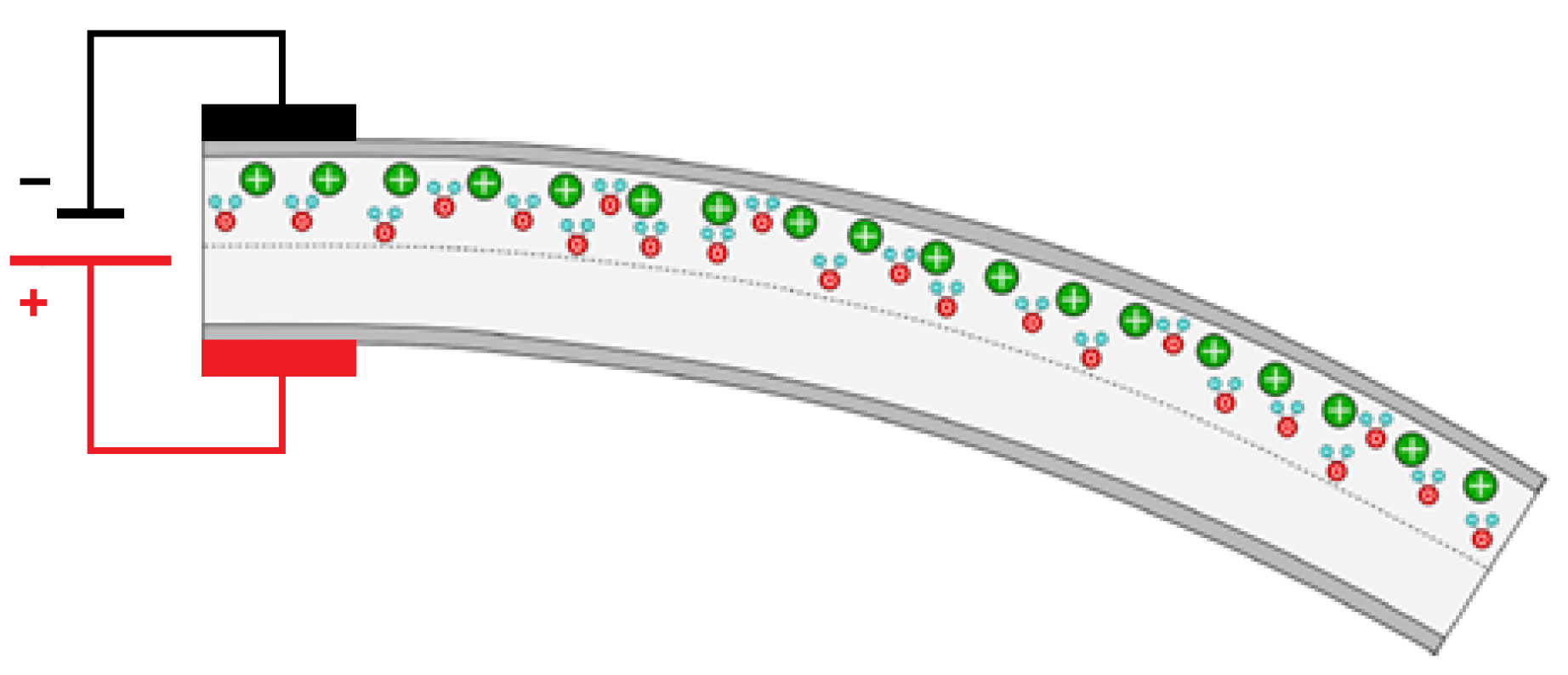
2.1. Ionic Polymer Metal Composite (IPMC)
2.1.1. Recent Trends in the Modification of IPMC
Modification of Ionomers Based on Fluorine Polymers
Modification of non-Fluorinated Ionomers
Modification of Metal Electrodes
2.1.2. Actual Trends in the Application of IMPCs in Soft Robotics
- driven with low voltage (<3 V);
- low power consumption;
- fast response (>10 Hz in water);
- mechanically and chemically durable and stable;
- soft and compliant;
- works in wet conditions (or in water).
2.2. Dielectric Electroactive Polymers (DEAPs)
2.2.1. Recent Trends in the Modification of DEAPs
2.2.2. Actual Trends in the Application of DEAP in Soft Robotics
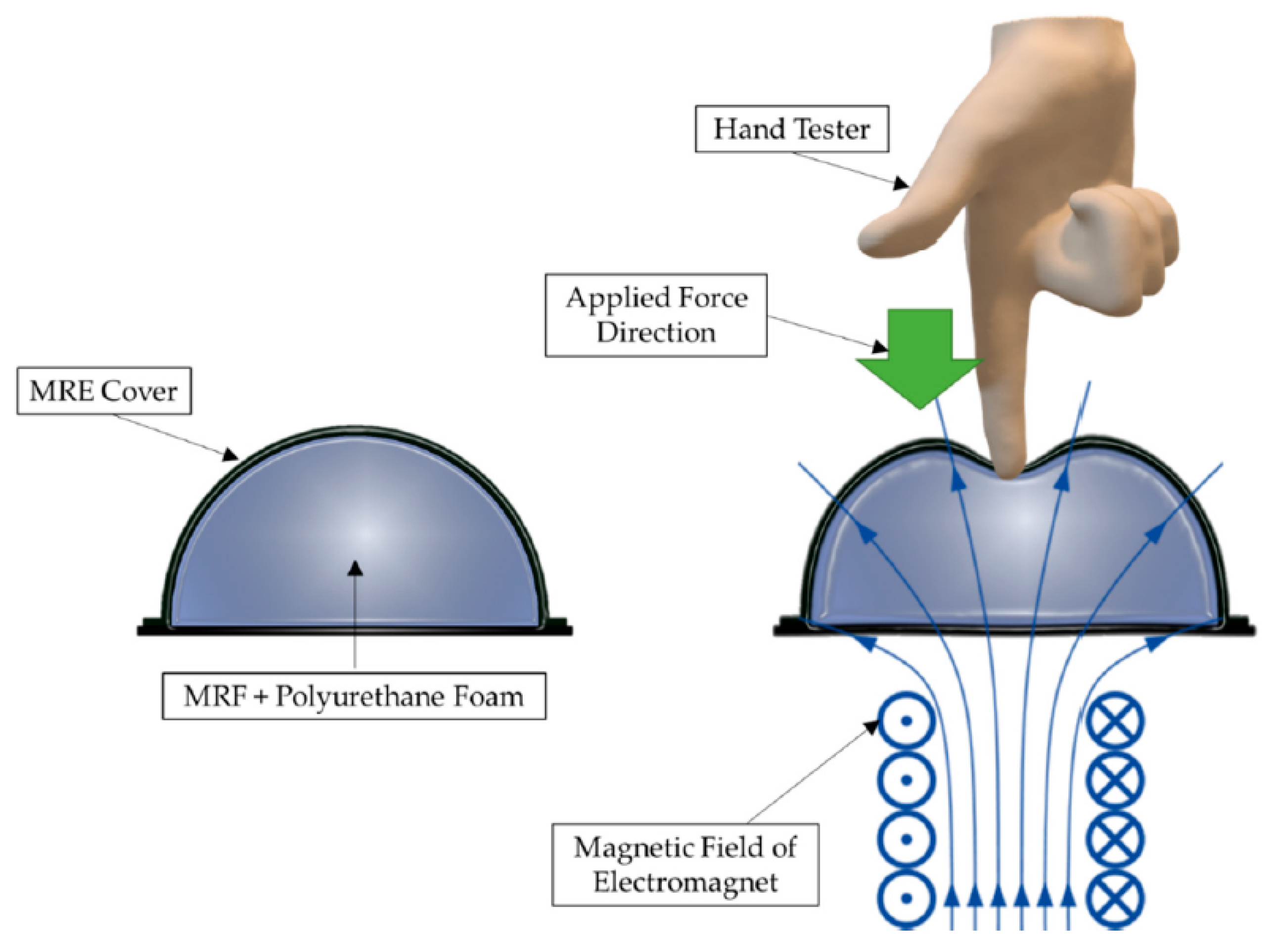
2.3. Magnetorheological Elastomers (MRE)
2.3.1. Actual Trends in the Modification of MREs
2.3.2. Actual Trends in the Application of MRE in Soft Robotics
3. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bar-Cohen, Y. Electroactive Polymer (EAP) Actuators as Artificial Muscles: Reality, Potential, and Challenges; SPIE Press: Bellingham, UK, 2001. [Google Scholar]
- Böse, H.; Gerlach, T.; Ehrlich, J. Magnetorheological elastomers—An underestimated class of soft actuator materials. J. Intell. Mater. Syst. Struct. 2021, 32, 1550–1564. [Google Scholar] [CrossRef]
- Park, S.W.; Kim, S.J.; Park, S.H.; Lee, J.; Kim, H.; Kim, M.K. Recent Progress in Development and Applications of Ionic Polymer–Metal Composite. Micromachines 2022, 13, 1290. [Google Scholar] [CrossRef] [PubMed]
- Bira, N.; Dhagat, P.; Davidson, J.R. A Review of Magnetic Elastomers and Their Role in Soft Robotics. Front. Robot. AI 2020, 7. [Google Scholar] [CrossRef] [PubMed]
- Rosset, S.; Araromi, O.A.; Schlatter, S.; Shea, H.R. Fabrication Process of Silicone-based Dielectric Elastomer Actuators. JoVE 2016, 108, e53423. [Google Scholar] [CrossRef]
- Wiranata, A.; Kanno, M.; Chiya, N.; Okabe, H.; Horii, T.; Fujie, T.; Hosoya, N.; Maeda, S. High-Frequency, low-voltage oscillations of dielectric elastomer actuators. Appl. Phys. Express 2022, 15, 011002. [Google Scholar] [CrossRef]
- Xu, B.; Wang, S.; Zhang, Z.; Ling, J.; Wu, X. Improving the torsion performance of IPMC by changing the electrode separation. Sci. Rep. 2021, 11, 7639. [Google Scholar] [CrossRef]
- Khairi, M.H.A.; Fatah, A.Y.A.; Mazlan, S.A.; Ubaidillah, U.; Nordin, N.A.; Ismail, N.I.N.; Bok-Choi, S.; Aziz, S.A.A. Enhancement of Particle Alignment Using Silicone Oil Plasticizer and Its Effects on the Field-Dependent Properties of Magnetorheological Elastomers. Int. J. Mol. Sci. 2019, 20, 4085. [Google Scholar] [CrossRef]
- Yin, G.X.; He, Q.S.; Yu, M.; Wu, Y.W.; Xu, X.R. Ionic polymer metal composites actuators with enhanced driving performance by incorporating graphene quantum dots. J. Cent. South Univ. 2022, 29, 1412–1422. [Google Scholar] [CrossRef]
- Ru, J.; Zhao, D.; Zhu, Z.; Wang, Y. Fabrication and Characterization of a Novel Smart-Polymer Actuator with Nanodispersed CNT/Pd Composite Interfacial Electrodes. Polymers 2022, 14, 3494. [Google Scholar] [CrossRef]
- Qin, L.; Gong, C.; Hafezi, M.; Mawignon, F.J.; Huang, X.; Zeng, Q.; Zhang, Y.; Dong, G. Carboxylic Multi–Walled Carbon Nanotubes as Reinforcing Fillers in Ionic Polymer–Metal Composite Actuators with Enhanced Driving Performance. Adv. Eng. Mater. 2022, 24, 2200008. [Google Scholar] [CrossRef]
- Zhao, D.; Ru, J.; Wang, T.; Wang, Y.; Chang, L. Performance Enhancement of Ionic polymer–metal Composite Actuators with Polyethylene Oxide. Polymers 2021, 14, 80. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Shao, J.; Zhang, Z.; Liang, B.; Liu, X. Preparation and characterization analysis of carbon nanotubes and graphene electrode modified carbon nanotubes reinforced IPMC. Adv. Mech. Eng. 2021, 13, 168781402110407. [Google Scholar] [CrossRef]
- Engel, K.; Kilmartin, P.A.; Diegel, O. Additive manufacture of ionic polymer–metal composite actuators using digital light processing techniques. Rapid Prototyp. J. 2022. ahead-of-print. [Google Scholar] [CrossRef]
- Luqman, M.; Anis, A.; Shaikh, H.M.; Al-Zahrani, S.M.; Alam, M.A. Synthesis, Characterization and Fabrication of Copper Nanoparticles Embedded Non-Perfluorintaed Kraton Based Ionic Polymer Metal Composite (IPMC) Actuator. Actuators 2022, 11, 183. [Google Scholar] [CrossRef]
- Luqman, M.; Anis, A.; Shaikh, H.M.; Al-Zahrani, S.M.; Alam, M.A. Development of a Soft Robotic Bending Actuator Based on a Novel Sulfonated Polyvinyl Chloride-Phosphotungstic Acid Ionic polymer–metal Composite (IPMC) Membrane. Membranes 2022, 12, 651. [Google Scholar] [CrossRef]
- Luqman, M.; Shaikh, H.; Anis, A.; Al-Zahrani, S.M.; Hamidi, A.; Inamuddin. Platinum-coated silicotungstic acid-sulfonated polyvinyl alcohol-polyaniline based hybrid ionic polymer metal composite membrane for bending actuation applications. Sci. Rep. 2022, 12, 4467. [Google Scholar] [CrossRef]
- Luqman, M.; Shaikh, H.M.; Anis, A.; Al-Zahrani, S.M.; Alam, M.A. A Convenient and Simple Ionic polymer–metal Composite (IPMC) Actuator Based on a Platinum-Coated Sulfonated Poly(ether ether ketone)-Polyaniline Composite Membrane. Polymers 2022, 14, 668. [Google Scholar] [CrossRef]
- Wang, Y.; Liang, Y.; Bansode, A.; Lou, X.; Zhang, X.; Beckingham, B.S.; Auad, M.L. 3D–Printed Poly(acrylic acid–vinylimidazole) Ionic Polymer Metal Composite Actuators. Macromol. Mater. Eng. 2022, 2200440. [Google Scholar] [CrossRef]
- Burawudi, K.K.; D’Anniballe, R.; Langius, R.G.; Carloni, R. A Comparative Study of Predictive Models for Nafion-117 IPMC Soft Actuators. In Proceedings of the 2021 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Delft, The Netherlands, 12–16 July 2021; pp. 1124–1129. [Google Scholar] [CrossRef]
- Liang, Y.; Zhang, H.; Lin, Z.; Ma, S.; Ren, L.; Ren, L. High Specific Surface Area Pd/Pt Electrode-Based Ionic Polymer–Metal Composite for High-Performance Biomimetic Actuation. ACS Sustain. Chem. Eng. 2022, 10, 2645–2652. [Google Scholar] [CrossRef]
- Omiya, M.; Kurokawa, M. Deformation mechanism of hydrogen-assisted ionic polymer metal composite actuator. Mech. Adv. Mater. Struct. 2021, 1–11. [Google Scholar] [CrossRef]
- Zhang, H.; Hu, Y.; Liang, Y.; Wang, M.; Ma, S.; Ren, L. Electromechanical performances of IPMC actuator enhanced by high-quality Pd/Pt electrodes. In Proceedings of the 2021 27th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Shanghai, China, 26–28 November 2021; pp. 647–650. [Google Scholar] [CrossRef]
- Xu, Y.; Jia, W.; Zhang, Y.; Wang, F.; Zhao, G.; Zang, D. Mechanical properties analysis and surface composition research of Ag-IPMC. Sens. Actuators Phys. 2021, 319, 112565. [Google Scholar] [CrossRef]
- Biswal, D.K.; Moharana, B.R.; Mohapatra, T.P. Bending response optimization of an ionic polymer–metal composite actuator using orthogonal array method. Mater. Today: Proc. 2022, 49, 1550–1555. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, D.; Zhang, X.; Tian, A. Electroless copper deposition and interface characteristics of ionic electroactive polymer. J. Mater. Res. Technol. 2021, 11, 849–856. [Google Scholar] [CrossRef]
- Yesaswi, C.S.; Sreekanth, P.S.R. Characterisation of Silver-coated Teflon fabric-reinforced Nafion ionic polymer metal composite with carbon nanotubes and graphene nanoparticles. Iran. Polym. J. 2022, 31, 485–502. [Google Scholar] [CrossRef]
- Li, J.; Tian, A.; Wang, X.; Zhai, Z.; Zhang, X.; Feng, B.; Yao, S.; Du, H. Dendrite Growth and Performance of Self-Healing Composite Electrode IPMC Driven by Cu2. ACS Omega 2022, 7, 17575–17582. [Google Scholar] [CrossRef] [PubMed]
- Tian, A.; Li, J.; Wang, X.; Sun, Y.; Zhang, X.; Yao, S.; Du, H. Formation and characterization of Pt-Cu-IPMC with high specific surface area and dendritic electrode. Compos. Interfaces 2022, 29, 1203–1215. [Google Scholar] [CrossRef]
- He, Z.; Jiao, S.; Wang, Z.; Wang, Y.; Yang, M.; Zhang, Y.; Liu, Y.; Wu, Y.; Shang, J.; Chen, Q.; et al. An Antifatigue Liquid Metal Composite Electrode Ionic polymer–metal Composite Artificial Muscle with Excellent Electromechanical Properties. ACS Appl. Mater. Interfaces 2022, 14, 14630–14639. [Google Scholar] [CrossRef]
- Guo, D.; Wang, L.; Wang, X.; Xiao, Y.; Wang, C.; Chen, L.; Ding, Y. PEDOT coating enhanced electromechanical performances and prolonged stable working time of IPMC actuator. Sens. Actuators Chem. 2020, 305, 127488. [Google Scholar] [CrossRef]
- Neuhaus, R.; Zahiri, N.; Petrs, J.; Tahouni, Y.; Siegert, J.; Kolaric, I.; Dahy, H.; Bauernhansl, T. Integrating Ionic Electroactive Polymer Actuators and Sensors Into Adaptive Building Skins–Potentials and Limitations. Front. Built Environ. 2020, 6, 95. [Google Scholar] [CrossRef]
- Shahinpoor, M.; Kim, K. Ionic polymer–metal composites: IV. Industrial and medical applications. Smart Mater. Struct. 2005, 14, 197–214. [Google Scholar] [CrossRef]
- Shen, Q.; Wang, T.; Wen, L.; Liang, J. Modelling and Fuzzy Control of an Efficient Swimming Ionic polymer–metal Composite Actuated Robot. Int. J. Adv. Robot. Syst. 2013, 10, 350. [Google Scholar] [CrossRef]
- Hubbard, J.J.; Fleming, M.; Palmre, V.; Pugal, D.; Kim, K.J.; Leang, K.K. Monolithic IPMC Fins for Propulsion and Maneuvering in Bioinspired Underwater Robotics. IEEE J. Ocean. Eng. 2014, 39, 540–551. [Google Scholar] [CrossRef]
- Du, R.; Li, Z.; Youcef-Toumi, K.; Alvarado, P. Robot Fish: Bio-Inspired Fishlike Underwater Robots; Springer Tracts in Mechanical Engineering, Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Chen, Z. A review on robotic fish enabled by ionic polymer–metal composite artificial muscles. Robot. Biomimetics 2017, 4, 24. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Hou, P.; Ye, Z. Robotic Fish Propelled by a Servo Motor and Ionic polymer–metal Composite Hybrid Tail. J. Dyn. Syst. Meas. Control 2019, 141, 071001. [Google Scholar] [CrossRef]
- Nakano, M.; Mazzone, A.; Piffaretti, F.; Gassert, R.; Nakao, M.; Bleuler, H. IPMC actuator array as a 3D haptic display. In Proceedings of the Smart Structures and Materials 2005: Electroactive Polymer Actuators and Devices (EAPAD); Bar-Cohen, Y., Ed.; International Society for Optics and Photonics, SPIE: Bellingham, DC, USA, 2005; Volume 5759, pp. 331–339. [Google Scholar] [CrossRef]
- Mojarrad, M.; Shahinpoor, M. Biomimetic robotic propulsion using polymeric artificial muscles. In Proceedings of the International Conference on Robotics and Automation, Albuquerque, NM, USA, 20–25 April 1997; Volume 3, pp. 2152–2157. [Google Scholar] [CrossRef]
- Guo, S.; Fukuda, T.; Asaka, K. A new type of fish-like underwater microrobot. IEEE/ASME Trans. Mechatron. 2003, 8, 136–141. [Google Scholar] [CrossRef]
- Shi, L.; Guo, S.; Li, M.; Mao, S.; Xiao, N.; Gao, B.; Song, Z.; Asaka, K. A Novel Soft Biomimetic Microrobot with Two Motion Attitudes. Sensors 2012, 12, 16732–16758. [Google Scholar] [CrossRef] [PubMed]
- Yun, K.; Kim, W.J. System identification and microposition control of ionic polymer metal composite for three-finger gripper manipulation. Proc. Inst. Mech. Eng. Part J. Syst. Control. Eng. 2006, 220, 539–551. [Google Scholar] [CrossRef]
- Kim, C.; Kim, S.; Yang, H.; Park, N.; Park, Y. An auto-focus lens actuator using ionic polymer metal composites: Design, fabrication and control. Int. J. Prec. Eng. Manuf. 2012, 13, 1883–1887. [Google Scholar] [CrossRef]
- Tsai, S.A.; Wei, H.C.; Su, G.D.J. Polydimethylsiloxane coating on an ionic polymer metallic composite for a tunable focusing mirror. Appl. Opt. 2012, 51, 8315–8323. [Google Scholar] [CrossRef]
- Tripathi, A.; Chattopadhyay, B.; Das, S. Cost-effective fabrication of ionic polymer based artificial muscles for catheter-guidewire maneuvering application. Microsyst. Technol. 2019, 25, 1129–1136. [Google Scholar] [CrossRef]
- Kim, K.J.; Tadokoro, S. Electroactive Polymers for Robotic Applications Artificial Muscles and Sensors, 1st ed.; Springer: London, UK, 2007. [Google Scholar]
- Hao, L.; Li, Z. Modeling and adaptive inverse control of hysteresis and creep in ionic polymer–metal composite actuators. Smart Mater. Struct. 2010, 19, 025014. [Google Scholar] [CrossRef]
- Sun, Z.; Hao, L.; Chen, W.; Li, Z.; Liu, L. A novel discrete adaptive sliding-mode-like control method for ionic polymer–metal composite manipulators. Smart Mater. Struct. 2013, 22, 095027. [Google Scholar] [CrossRef]
- Chen, X.; Su, C.Y. Adaptive Control for Ionic polymer–metal Composite Actuators. IEEE Trans. Syst. Man, Cybern. Syst. 2016, 46, 1468–1477. [Google Scholar] [CrossRef]
- Bernat, J.; Gajewski, P.; Kołota, J.; Marcinkowska, A. Silicone-Based Membranes as Potential Materials for Dielectric Electroactive Polymer Actuators. Energies 2022, 15, 6324. [Google Scholar] [CrossRef]
- Katzer, K.; Kanan, A.; Pfeil, S.; Grellmann, H.; Gerlach, G.; Kaliske, M.; Cherif, C.; Zimmermann, M. Thermo-Electro-Mechanical Characterization of PDMS-Based Dielectric Elastomer Actuators. Materials 2021, 15, 221. [Google Scholar] [CrossRef] [PubMed]
- Jang, Y.; Nabae, H.; Endo, G.; Suzumori, K. Analysis of the multi-balloon dielectric elastomer actuator for traveling wave motion. Sens. Actuators Phys. 2022, 333, 113243. [Google Scholar] [CrossRef]
- Ren, Z.; Kim, S.; Ji, X.; Zhu, W.; Niroui, F.; Kong, J.; Chen, Y. A High-Lift Micro-Aerial-Robot Powered by Low-Voltage and Long-Endurance Dielectric Elastomer Actuators. Adv. Mater. 2022, 34, e2106757. [Google Scholar] [CrossRef]
- Li, A.L.; Lee, S.; Shahsa, H.; Duduta, M. Real time high voltage capacitance for rapid evaluation of dielectric elastomer actuators. Soft Matter 2022, 18, 7123–7130. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Y.; Nguyen, T.; Sun, L.; Tran, D. The dissipative dynamic performances of dielectric elastomer actuator with viscoelastic effects. Mater. Res. Express 2022, 9, 075701. [Google Scholar] [CrossRef]
- Reis Carneiro, M.; Majidi, C.; Tavakoli, M. Dielectric Elastomer Actuators with Biphasic Ag–EGaIn Electrodes. Adv. Eng. Mater. 2022, 24, 2100953. [Google Scholar] [CrossRef]
- Zhu, J.; Zhang, L.; Zhao, Y.; Yin, L.J.; Zha, J.W.; Dang, Z.M. Advanced dielectric elastomer based on optimized thermoplastic polyurethane–styrene ethylene butylene styrene blend: Experiment and simulation. J. Appl. Polym. Sci. 2022, 139, 51595. [Google Scholar] [CrossRef]
- Wu, C.; Yan, H.; Cai, A.; Cao, C. A Dielectric Elastomer Actuator-Driven Vibro-Impact Crawling Robot. Micromachines 2022, 13, 1660. [Google Scholar] [CrossRef] [PubMed]
- Ogawa, K.; Nishimura, T.; Ming, A. Development of Bendable Elliptical Cone Dielectric Elastomer Actuator. In Proceedings of the 2022 IEEE International Conference on Mechatronics and Automation (ICMA), Guilin, China, 7–9 August 2022; pp. 1233–1238. [Google Scholar] [CrossRef]
- Poulin, A.; Rosset, S.; Shea, H.R. Printing low-voltage dielectric elastomer actuators. Appl. Phys. Lett. 2015, 107, 244104. [Google Scholar] [CrossRef]
- Borayek, R.; Zhang, P.; Willy, H.J.; Zedan, M.; Zhu, J.; Ding, J. Programmable, UV-Printable Dielectric Elastomers Actuate at Low Voltage without Prestretch and Supporting Frames. ACS Appl. Electron. Mater. 2020, 2, 4042–4053. [Google Scholar] [CrossRef]
- Maas, J.; Tepel, D.; Hoffstadt, T. Actuator design and automated manufacturing process for DEAP-based multilayer stack-actuators. Meccanica 2015, 50, 2839–2854. [Google Scholar] [CrossRef]
- Kang, Z.; Yu, L.; Nie, Y.; Skov, A.L. Crosslinking Methodology for Imidazole-Grafted Silicone Elastomers Allowing for Dielectric Elastomers Operated at Low Electrical Fields with High Strains. ACS Appl. Mater. Interfaces 2022, 14, 51384–51393. [Google Scholar] [CrossRef] [PubMed]
- Bernat, J.; Kolota, J.; Rosset, S. Identification of a Nonlinear Dielectric Elastomer Actuator Based on the Harmonic Balance Method. IEEE/ASME Trans. Mechatron. 2021, 26, 2664–2675. [Google Scholar] [CrossRef]
- Bernat, J.; Kołota, J. Modeling of Dielectric Electroactive Polymer Actuators with Elliptical Shapes. Energies 2021, 14, 5633. [Google Scholar] [CrossRef]
- Kolota, J. The FEM model of the pump made of dielectric electroactive polymer membrane. Appl. Sci. 2020, 10, 2283. [Google Scholar] [CrossRef]
- Newell, B.; Garcia, J.; Krutz, G. Dielectric Electroactive Polymers with Chemical Pre-Strain: An Experimentally Validated Model. Actuators 2018, 7, 50. [Google Scholar] [CrossRef]
- Choi, H.; Jung, K.; Nguyen, C.; Jung, M.; Koo, I.; Koo, I.; Lee, J.; Lee, J.; Nam, J.; Cho, M.; et al. Effects of prestrain on behavior of dielectric elastomer actuator. Proc. SPIE 2005, 5759. [Google Scholar] [CrossRef]
- He, L.; Lou, J.; Du, J.; Wang, J. Finite bending of a dielectric elastomer actuator and pre-stretch effects. Int. J. Mech. Sci. 2017, 122, 120–128. [Google Scholar] [CrossRef]
- Wang, H.; Yang, L.; Zhang, X.; Ang, M.H. Effect of different prestretching index and preloading on actuation behaviors of dielectric elastomer actuator. J. Mater. Res. Technol. 2021, 15, 4064–4073. [Google Scholar] [CrossRef]
- Ozsecen, Y.; Sivak, M.; Mavroidis, C. Haptic Interfaces Using Dielectric Electroactive Polymers. Proc. SPIE 2010, 7647, 847244. [Google Scholar] [CrossRef]
- Heo, Y.H.; Choi, D.S.; Kim, D.E.; Kim, S.Y. Flexible Vibrotactile Actuator Based on Dielectric Elastomer for Smart Handheld Devices. Appl. Sci. 2021, 11, 2020. [Google Scholar] [CrossRef]
- Pei, Q.; Pelrine, R.; Stanford, S.; Kornbluh, R.D.; Rosenthal, M.S.; Meijer, K.; Full, R.J. Multifunctional electroelastomer rolls and their application for biomimetic walking robots. In Proceedings of the Smart Structures and Materials 2002: Industrial and Commercial Applications of Smart Structures Technologies; McGowan, A.M.R., Ed.; International Society for Optics and Photonics, SPIE: Bellingham, DC, USA, 2002; Volume 4698, pp. 246–253. [Google Scholar] [CrossRef]
- Araromi, O.A.; Gavrilovich, I.; Shintake, J.; Rosset, S.; Richard, M.; Gass, V.; Shea, H.R. Rollable Multisegment Dielectric Elastomer Minimum Energy Structures for a Deployable Microsatellite Gripper. IEEE/ASME Trans. Mechatron. 2015, 20, 438–446. [Google Scholar] [CrossRef]
- Kaal, W.; Herold, S. Electroactive polymer actuators in dynamic applications. IEEE/ASME Trans. Mechatron. 2011, 16, 24–32. [Google Scholar] [CrossRef]
- Hodgins, M.; York, A.; Seelecke, S. Experimental comparison of bias elements for out-of-plane DEAP actuator system. Smart Mater. Struct. 2013, 22, 094016. [Google Scholar] [CrossRef]
- Rizzello, G.; Naso, D.; York, A.; Seelecke, S. Modeling, Identification, and Control of a Dielectric Electro-Active Polymer Positioning System. IEEE Trans. Control. Syst. Technol. 2015, 23, 632–643. [Google Scholar] [CrossRef]
- Hau, S.; Rizzello, G.; Seelecke, S. A novel dielectric elastomer membrane actuator concept for high-force applications. Extrem. Mech. Lett. 2018, 23, 24–28. [Google Scholar] [CrossRef]
- Cao, C.; Gao, X.; Conn, A. A Magnetically Coupled Dielectric Elastomer Pump for Soft Robotics. Adv. Mater. Technol. 2019, 4, 1900128. [Google Scholar] [CrossRef]
- Rizzello, G.; Naso, D.; Turchiano, B.; York, A.; Seelecke, S. LMI-based design of PI controllers for micropositioning dielectric electro-active polymer membranes. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 5509–5514. [Google Scholar] [CrossRef]
- Baumgartner, R.; Kogler, A.; Stadlbauer, J.M.; Foo, C.C.; Kaltseis, R.; Baumgartner, M.; Mao, G.; Keplinger, C.; Koh, S.J.A.; Arnold, N.; et al. A Lesson from Plants: High-Speed Soft Robotic Actuators. Adv. Sci. 2020, 7, 1903391. [Google Scholar] [CrossRef] [PubMed]
- Loew, P.; Rizzello, G.; Seelecke, S. A novel biasing mechanism for circular out-of-plane dielectric actuators based on permanent magnets. Mechatronics 2018, 56, 48–57. [Google Scholar] [CrossRef]
- Cao, C.; Conn, A.T. Performance Optimization of a Conical Dielectric Elastomer Actuator. Actuators 2018, 7, 32. [Google Scholar] [CrossRef]
- Cao, C.; Gao, X.; Burgess, S.; Conn, A.T. Power optimization of a conical dielectric elastomer actuator for resonant robotic systems. Extrem. Mech. Lett. 2020, 35, 100619. [Google Scholar] [CrossRef]
- Sideris, E.; de Lange, H. Pumps operated by solid-state electromechanical smart material actuators—A review. Sens. Actuators Phys. 2020, 307, 111915. [Google Scholar] [CrossRef]
- Ye, Z.; Chen, Z. Modeling and Control of a 2-DOF Dielectric Elastomer Diaphragm Actuator. IEEE/ASME Trans. Mechatron. 2019, 24, 218–227. [Google Scholar] [CrossRef]
- Behboodi, A.; Lee, S. Benchmarking of a Commercially Available Stacked Dielectric Elastomer as an Alternative Actuator for Rehabilitation Robotic Exoskeletons. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; pp. 499–505. [Google Scholar] [CrossRef]
- Zhao, H.; Hussain, A.M.; Duduta, M.; Vogt, D.M.; Wood, R.J.; Clarke, D.R. Compact Dielectric Elastomer Linear Actuators. Adv. Funct. Mater. 2018, 28, 1804328. [Google Scholar] [CrossRef]
- Lucarini, S.; Moreno-Mateos, M.A.; Danas, K.; Garcia-Gonzalez, D. Insights into the viscohyperelastic response of soft magnetorheological elastomers: Competition of macrostructural versus microstructural players. Int. J. Solids Struct. 2022, 256, 111981. [Google Scholar] [CrossRef]
- Lin, D.; Yang, F.; Gong, D.; Li, R. A new vibration isolator integrating tunable stiffness-damping and active driving properties based on radial-chains magnetorheological elastomer. Mech. Syst. Signal Process. 2023, 183, 109633. [Google Scholar] [CrossRef]
- Wang, B.; Li, Y.; Gao, Y.; Zhang, J.; Xu, Z.; Li, J.; Li, J.; Kari, L.; Wang, Y.; Gong, X. The influence of particle chain-magnetic field spatial location, frequency, dynamic strain amplitude and the prestrain on the mechanical performance of anisotropic magneto-rheological elastomer. Polym. Test. 2021, 104, 107411. [Google Scholar] [CrossRef]
- Clark, A.T.; Marchfield, D.; Cao, Z.; Dang, T.; Tang, N.; Gilbert, D.; Corbin, E.A.; Buchanan, K.S.; Cheng, X.M. The effect of polymer stiffness on magnetization reversal of magnetorheological elastomers. APL Mater. 2022, 10, 041106. [Google Scholar] [CrossRef]
- Tahir, S.; Usman, M.; Umer, M.A. Effect of Volume Fraction on Shear Mode Properties of Fe-Co and Fe-Ni Filled Magneto-Rheological Elastomers. Polymers 2022, 14, 2968. [Google Scholar] [CrossRef] [PubMed]
- Ding, L.; Zhang, S.; Wang, Q.; Wang, Y.; Xuan, S.; Gong, X.; Zhang, D. Self-healing and printable elastomer with excellent shear stiffening and magnetorheological properties. Compos. Sci. Technol. 2022, 223, 109430. [Google Scholar] [CrossRef]
- Kumar, B.S.; Raju, P.R.M.; Ratnam, C. Dynamic mechanical properties of magnetorheological polyurethane elastomers in comparison to existing antivibration rubbers. Adv. Mater. Process. Technol. 2022, 8, 2247–2261. [Google Scholar] [CrossRef]
- Yoon, J.H.; Lee, S.W.; Bae, S.H.; Kim, N.I.; Yun, J.H.; Jung, J.H.; Kim, Y.G. Effect of Cyclic Shear Fatigue under Magnetic Field on Natural Rubber Composite as Anisotropic Magnetorheological Elastomers. Polymers 2022, 14, 1927. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.; Li, Q.; Cao, Y.; Qie, J.; Zou, J.; You, J.; Lu, H.; Wang, W.; Wang, G. The effect of graphene-coating material (G-Fe) on the dynamic mechanical characteristics of magnetorheological elastomer (MRE). Appl. Phys. A 2022, 128, 657. [Google Scholar] [CrossRef]
- Mat Song, R.; Mazlan, S.A.; Johari, N.; Imaduddin, F.; Abdul Aziz, S.A.; Abd Fatah, A.Y.; Ubaidillah, U. Semi-Active Controllable Stiffness Engine Mount Utilizing Natural Rubber-Based Magnetorheological Elastomers. Front. Mater. 2022, 9, 875787. [Google Scholar] [CrossRef]
- Alam, M.N.; Kumar, V.; Jo, C.R.; Ryu, S.R.; Lee, D.J.; Park, S.S. Mechanical and magneto-mechanical properties of styrene-butadiene-rubber-based magnetorheological elastomers conferred by novel filler-polymer interactions. Compos. Sci. Technol. 2022, 229, 109669. [Google Scholar] [CrossRef]
- Shen, C.; Matsubara, M.; Masui, T.; Kishimoto, H.; Yamanaka, S.; Muramatsu, A.; Kanie, K. Magnetorheological Elastomer Films with Controlled Anisotropic Alignment of Polystyrene-Modified Fe 3 O 4 Nanoplates. ACS Appl. Polym. Mater. 2022, 4, 7240–7249. [Google Scholar] [CrossRef]
- Balogh, D.; Guba, S.; Horváth, B.; Szalai, I. Magnetic Field-Induced Deformation of Isotropic Magnetorheological Elastomers. Magnetochemistry 2022, 8, 146. [Google Scholar] [CrossRef]
- Kumar, V.; Alam, M.N.; Park, S.S. Robust magneto-rheological elastomers performance for composites based on iron oxide and carbon black in silicone rubber. J. Polym. Res. 2022, 29. [Google Scholar] [CrossRef]
- Kwon, S.H.; Lee, J.H.; Choi, H.J. Magnetic Particle Filled Elastomeric Hybrid Composites and Their Magnetorheological Response. Materials 2018, 11, 1040. [Google Scholar] [CrossRef] [PubMed]
- Khairi, M.H.A.; Noor, E.E.M.; Ubaidillah, U.; Aziz, S.A.A.; Mazlan, S.A.; Tarmizi, S.M.A.; Nordin, N.A. Enhancement of Magneto-Induced Modulus by the Combination of Filler and Plasticizer Additives-Based Magnetorheological Elastomer. Materials 2022, 15, 6396. [Google Scholar] [CrossRef]
- Bica, I.; Bunoiu, O.M. Magnetorheological Hybrid Elastomers Based on Silicone Rubber and Magnetorheological Suspensions with Graphene Nanoparticles: Effects of the Magnetic Field on the Relative Dielectric Permittivity and Electric Conductivity. Int. J. Mol. Sci. 2019, 20, 4201. [Google Scholar] [CrossRef]
- Chen, L.; Gong, X.L.; Li, W.H. Effect of carbon black on the mechanical performances of magnetorheological elastomers. Polym. Test. 2008, 27, 340–345. [Google Scholar] [CrossRef]
- Kim, G.W.; Kim, S.; Choi, H.J. Enhanced performance of nano-sized maghemite added carbonyl iron-based magnetorheological soft elastomer. J. Magn. Magn. Mater. 2022, 560, 169659. [Google Scholar] [CrossRef]
- Fischer, N.A.; Robinson, A.L.; Lee, T.J.; Calascione, T.M.; Koerner, L.; Nelson-Cheeseman, B.B. Magnetic annealing of extruded thermoplastic magnetic elastomers for 3D-Printing via FDM. J. Magn. Magn. Mater. 2022, 553, 169266. [Google Scholar] [CrossRef]
- Bastola, A.K.; Paudel, M.; Li, L. Development of hybrid magnetorheological elastomers by 3D printing. Polymer 2018, 149, 213–228. [Google Scholar] [CrossRef]
- Bastola, A.K.; Paudel, M.; Li, L. Dot-patterned hybrid magnetorheological elastomer developed by 3D printing. J. Magn. Magn. Mater. 2020, 494, 165825. [Google Scholar] [CrossRef]
- Morgenstern, A.H.; Calascione, T.M.; Fischer, N.A.; Lee, T.J.; Wentz, J.E.; Nelson-Cheeseman, B.B. Thermoplastic magnetic elastomer for fused filament fabrication. AIMS Mater. Sci. 2019, 6, 363–376. [Google Scholar] [CrossRef]
- Li, Y.; Li, J.; Li, W.; Du, H. A state-of-the-art review on magnetorheological elastomer devices. Smart Mater. Struct. 2014, 23, 123001. [Google Scholar] [CrossRef]
- Choi, Y.; Wereley, N.M. Vibration Isolation Performance of an Adaptive Magnetorheological Elastomer-Based Dynamic Vibration Absorber. Actuators 2022, 11, 157. [Google Scholar] [CrossRef]
- Zhang, J.; Zhu, Y.; Tu, J.; Li, Z.; Wang, Q. Development and Vibration Control of Frequency Adjustable Tuned Mass Damper Based on Magnetorheological Elastomer. Materials 2022, 15, 1829. [Google Scholar] [CrossRef]
- Gao, P.; Liu, H.; Xiang, C.; Yan, P.; Mahmoud, T. A new magnetorheological elastomer torsional vibration absorber: Structural design and performance test. Mech. Sci. 2021, 12, 321–332. [Google Scholar] [CrossRef]
- Jeong, U.C. Application of Adaptive Tuned Magneto-Rheological Elastomer for Vibration Reduction of a Plate by a Variable-Unbalance Excitation. Appl. Sci. 2020, 10, 3934. [Google Scholar] [CrossRef]
- Gao, P.; Xiang, C.; Liu, H.; Walker, P.; Zhang, N. Design of the frequency tuning scheme for a semi-active vibration absorber. Mech. Mach. Theory 2019, 140, 641–653. [Google Scholar] [CrossRef]
- Huang, X.; Zhai, Y.; He, G. Research on Vibration Control Technology of Robot Motion Based on Magnetorheological Elastomer. Materials 2022, 15, 6479. [Google Scholar] [CrossRef]
- Leng, D.; Feng, W.; Ning, D.; Liu, G. Analysis and design of a semi-active X-structured vibration isolator with magnetorheological elastomers. Mech. Syst. Signal Process. 2022, 181, 109492. [Google Scholar] [CrossRef]
- Li, H.; Wang, X.; Sun, J.; Ha, S.K.; Guan, Z. Theoretical and experimental investigations on active vibration control of the MRE multifunctional grille composite sandwich plates. Compos. Struct. 2022, 295, 115783. [Google Scholar] [CrossRef]
- Zhao, J.; Gao, Z.; Li, H.; Wong, P.K.; Xie, Z. Semi-active control for the nonlinear vibration suppression of square-celled sandwich plate with multi-zone MRE filler core. Mech. Syst. Signal Process. 2022, 172, 108953. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, J.; Chen, Z.; Gong, X.; Du, H.; Zhang, S.; Li, W.; Sun, S. Investigation of a novel MRE metamaterial sandwich beam with real-time tunable band gap characteristics. J. Sound Vib. 2022, 527, 116870. [Google Scholar] [CrossRef]
- Yao, J.; Gao, Y.; Fan, J.; Scarpa, F.; Li, Y. Design and verification of a magnetorheological elastomer-based actuator to reduce rotor vibration. Int. J. Mech. Mater. Des. 2022, 18, 701–718. [Google Scholar] [CrossRef]
- Kashima, S.; Miyasaka, F.; Hirata, K. Novel Soft Actuator Using Magnetorheological Elastomer. IEEE Trans. Magn. 2012, 48, 1649–1652. [Google Scholar] [CrossRef]
- Bernat, J.; Gajewski, P.; Kapela, R.; Marcinkowska, A.; Superczyńska, P. Design, Fabrication and Analysis of Magnetorheological Soft Gripper. Sensors 2022, 22, 2757. [Google Scholar] [CrossRef]
- Guan, R.; Zheng, H.; Liu, Q.; Ou, K.; sen Li, D.; Fan, J.; Fu, Q.; Sun, Y. DIW 3D printing of hybrid magnetorheological materials for application in soft robotic grippers. Compos. Sci. Technol. 2022, 223, 109409. [Google Scholar] [CrossRef]
- Choi, Y.T.; Hartzell, C.M.; Leps, T.; Wereley, N.M. Gripping characteristics of an electromagnetically activated magnetorheological fluid-based gripper. AIP Adv. 2018, 8, 056701. [Google Scholar] [CrossRef]
- Zhang, P.; Kamezaki, M.; Otsuki, K.; He, Z.; Sakamoto, H.; Sugano, S. Development of a Vacuum Suction Cup by Applying Magnetorheological Elastomers for Objects with Flat Surfaces. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 6–9 July 2020; pp. 777–782. [Google Scholar] [CrossRef]
- Choi, D.S.; Kim, T.H.; Lee, S.H.; Pang, C.; Bae, J.W.; Kim, S.Y. Beyond Human Hand: Shape-Adaptive and Reversible Magnetorheological Elastomer-Based Robot Gripper Skin. ACS Appl. Mater. Interfaces 2020, 12, 44147–44155. [Google Scholar] [CrossRef]
- Park, Y.J.; Choi, S.B. A New Tactile Transfer Cell Using Magnetorheological Materials for Robot-Assisted Minimally Invasive Surgery. Sensors 2021, 21, 3034. [Google Scholar] [CrossRef]
- Hooshiar, A.; Payami, A.; Dargahi, J.; Najarian, S. Magnetostriction-based force feedback for robot-assisted cardiovascular surgery using smart magnetorheological elastomers. Mech. Syst. Signal Process. 2021, 161, 107918. [Google Scholar] [CrossRef]
- Park, Y.J.; Lee, E.S.; Choi, S.B. A Cylindrical Grip Type of Tactile Device Using Magneto-Responsive Materials Integrated with Surgical Robot Console: Design and Analysis. Sensors 2022, 22, 1085. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Advantages | Disadvantages |
|---|---|---|
| IPMC |
|
|
| DEAP |
|
|
| MRE |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bernat, J.; Gajewski, P.; Kołota, J.; Marcinkowska, A. Review of Soft Actuators Controlled with Electrical Stimuli: IPMC, DEAP, and MRE. Appl. Sci. 2023, 13, 1651. https://doi.org/10.3390/app13031651
Bernat J, Gajewski P, Kołota J, Marcinkowska A. Review of Soft Actuators Controlled with Electrical Stimuli: IPMC, DEAP, and MRE. Applied Sciences. 2023; 13(3):1651. https://doi.org/10.3390/app13031651
Chicago/Turabian StyleBernat, Jakub, Piotr Gajewski, Jakub Kołota, and Agnieszka Marcinkowska. 2023. "Review of Soft Actuators Controlled with Electrical Stimuli: IPMC, DEAP, and MRE" Applied Sciences 13, no. 3: 1651. https://doi.org/10.3390/app13031651
APA StyleBernat, J., Gajewski, P., Kołota, J., & Marcinkowska, A. (2023). Review of Soft Actuators Controlled with Electrical Stimuli: IPMC, DEAP, and MRE. Applied Sciences, 13(3), 1651. https://doi.org/10.3390/app13031651