
ViPER+: Vehicle Pose Estimation Using Ultra-Wideband Radios for Automated Construction Safety Monitoring

 , and
, and
Abstract
1. Introduction
2. Literature Review
2.1. Automated Safety Monitoring Systems for Real-Time Environments
2.2. Vehicle and Equipment Tracking Using Ultra-Wideband Radios
3. Objective and Scope
4. Development of ViPER+ for Construction Vehicles and Equipment Pose Estimation
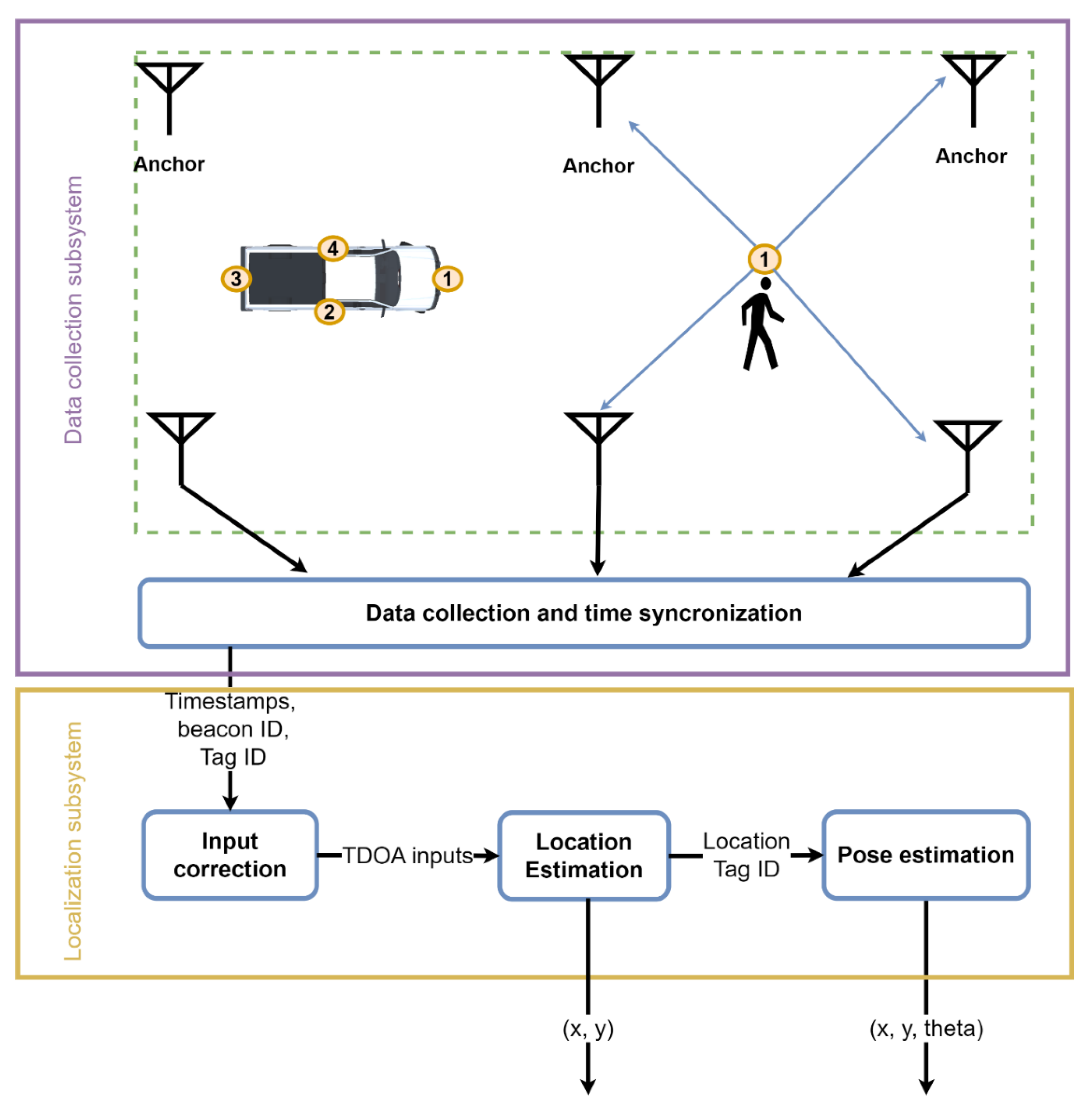
4.1. Data Collection Subsystem
4.1.1. Time Synchronization
4.1.2. Tag/Anchor Communication
4.1.3. Reception Timestamp Correction
4.2. Localization Subsystem
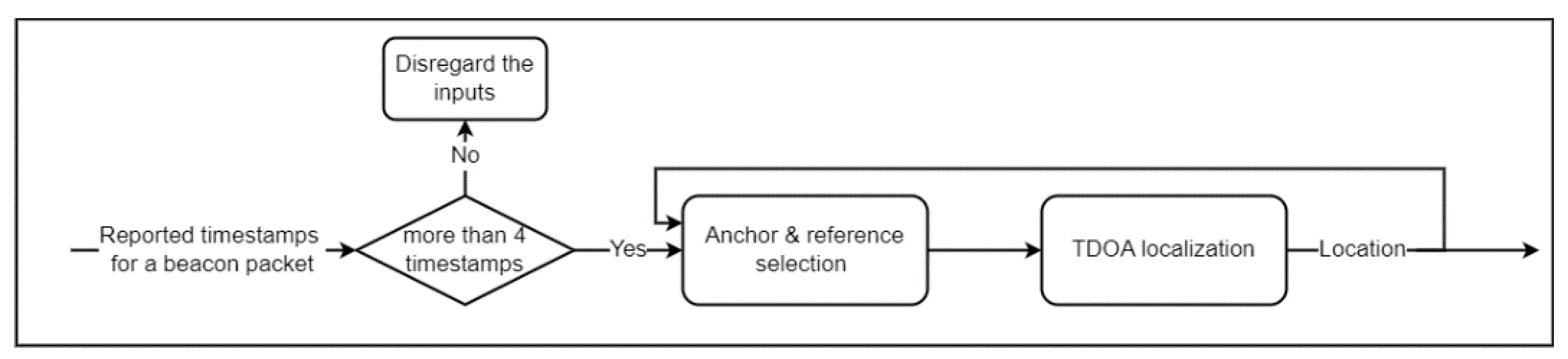
4.2.1. TDOA Localization
4.2.2. Input Correction and Location Estimation
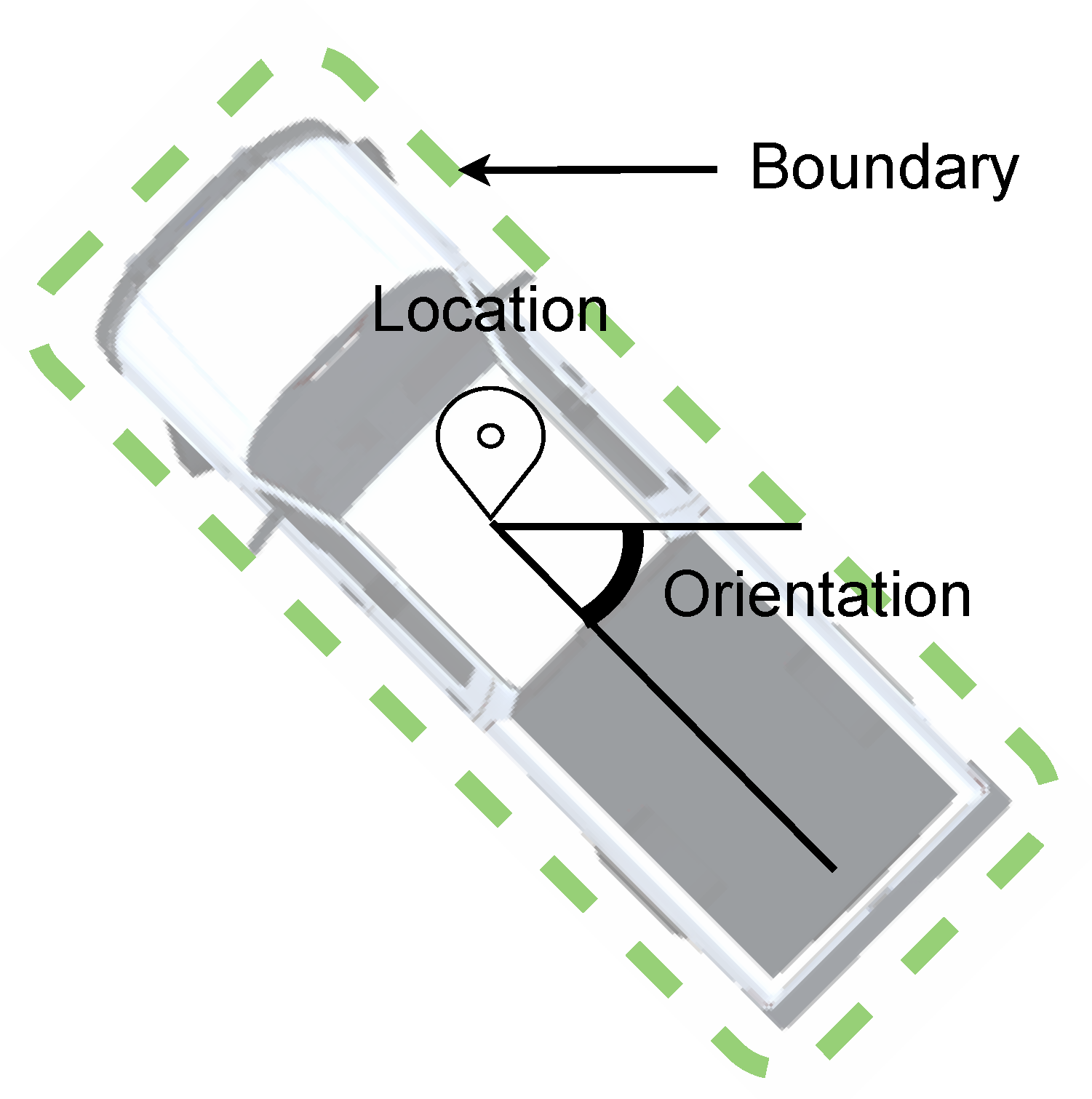
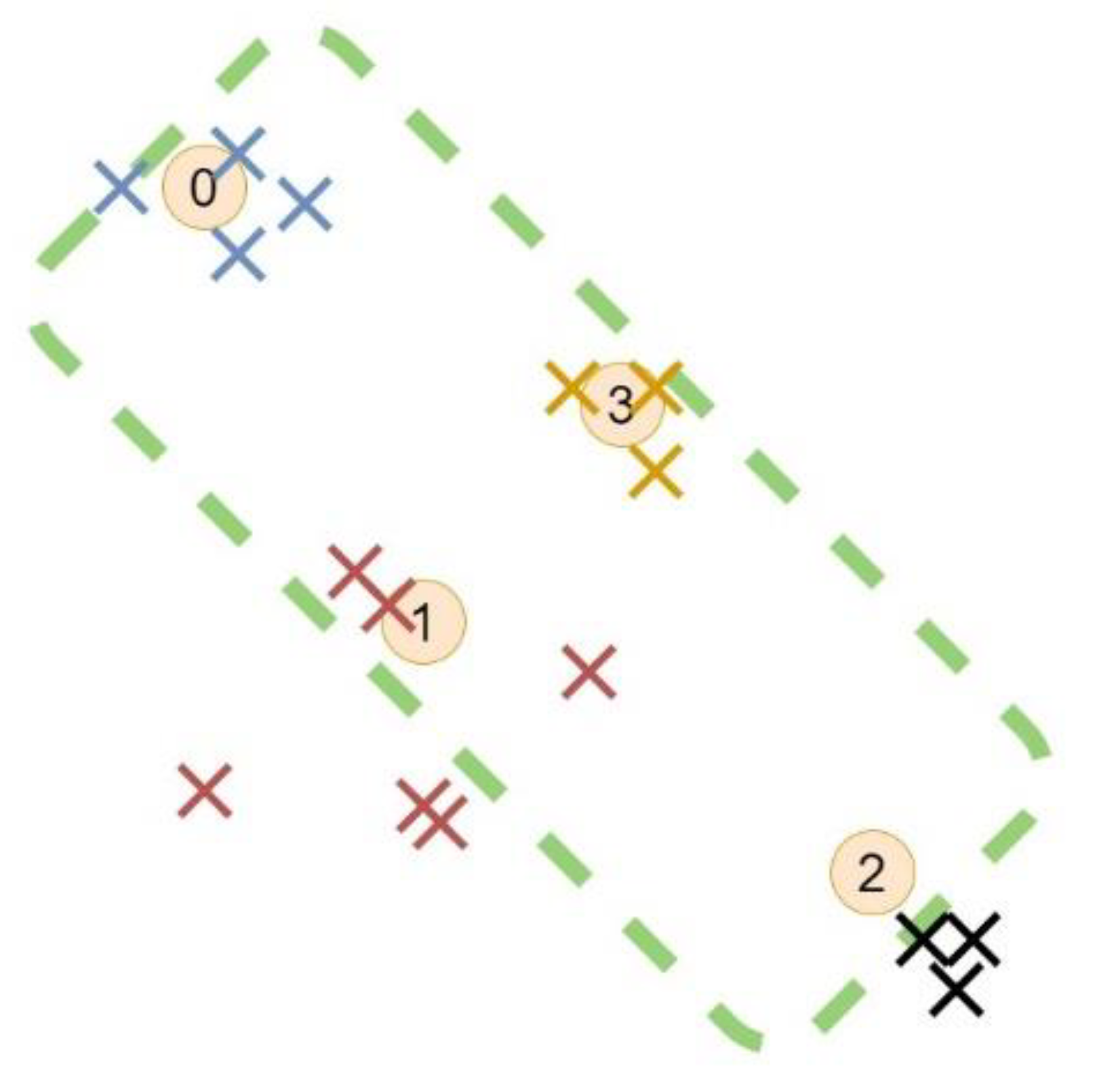
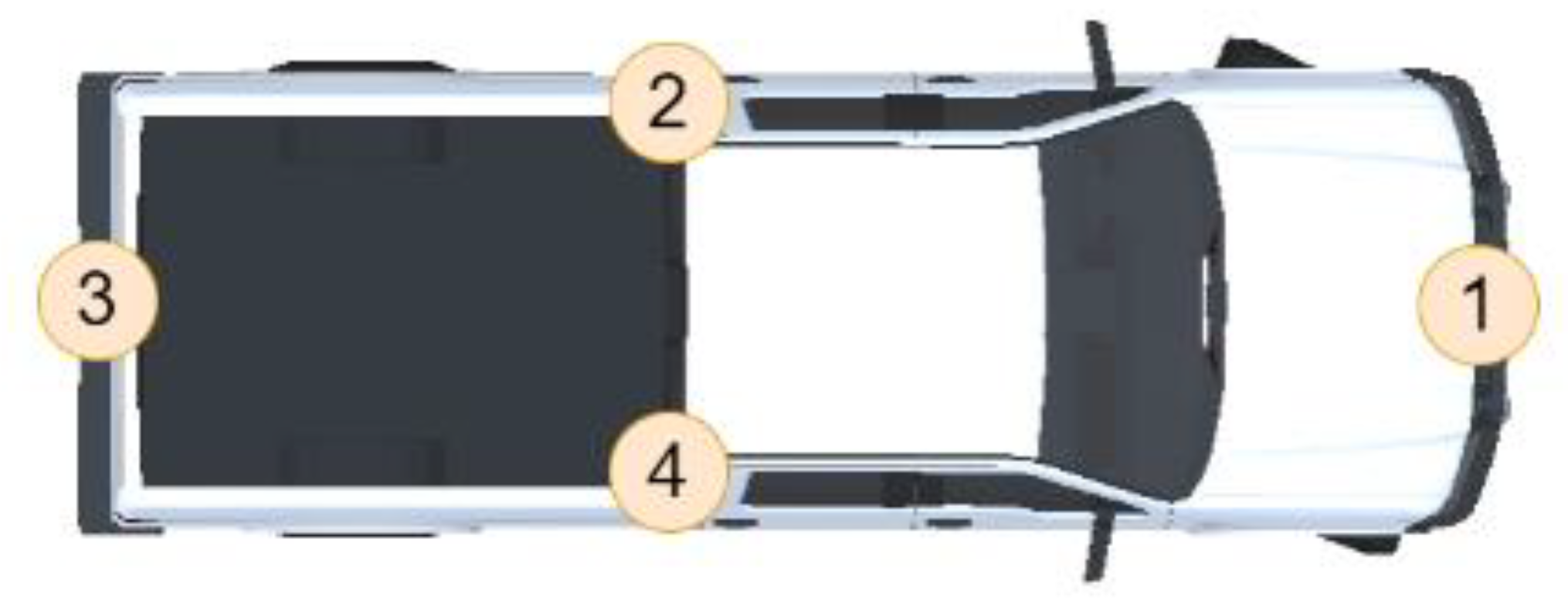
4.2.3. Pose Estimation
5. Deployment and Evaluation
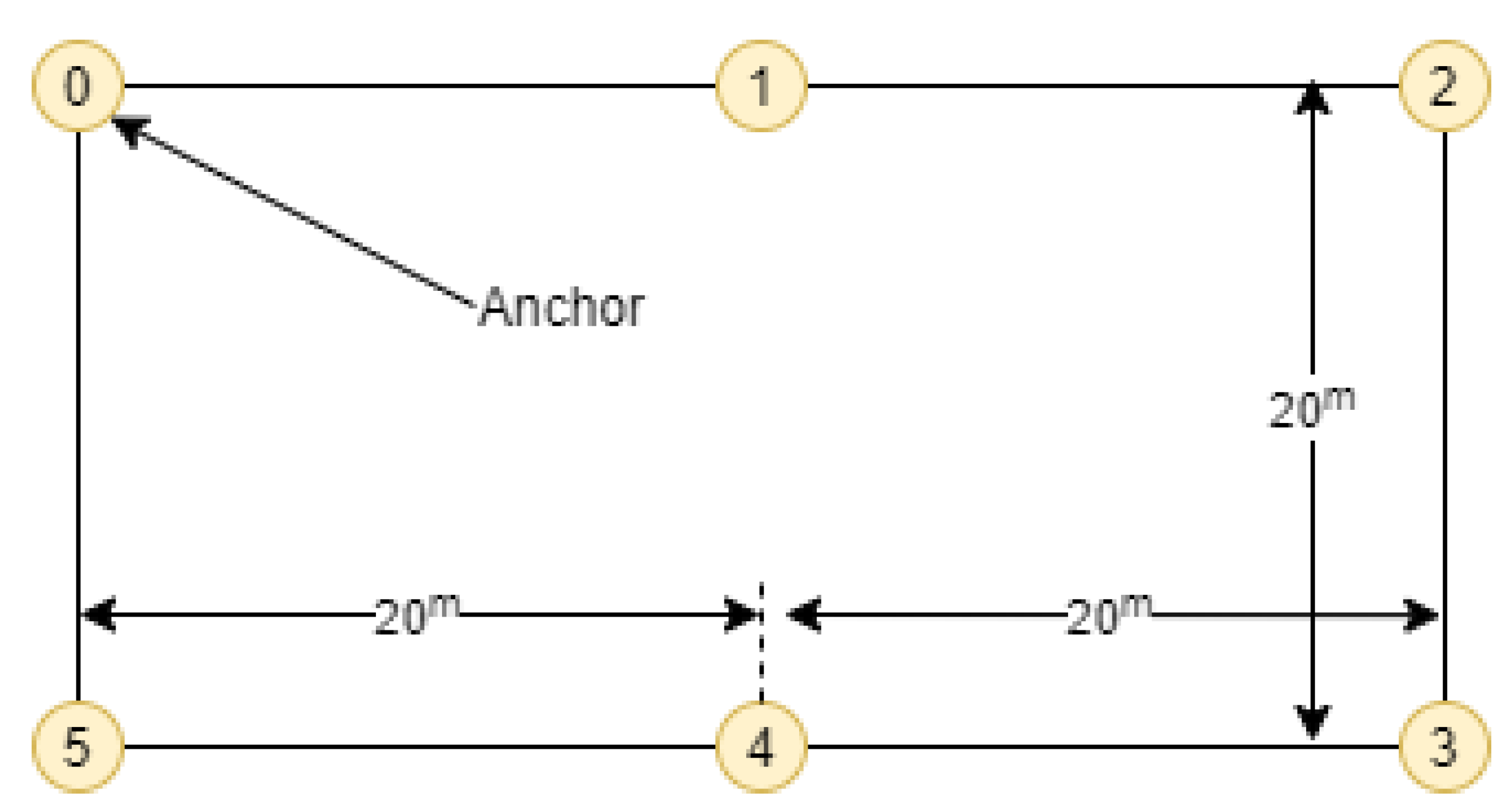
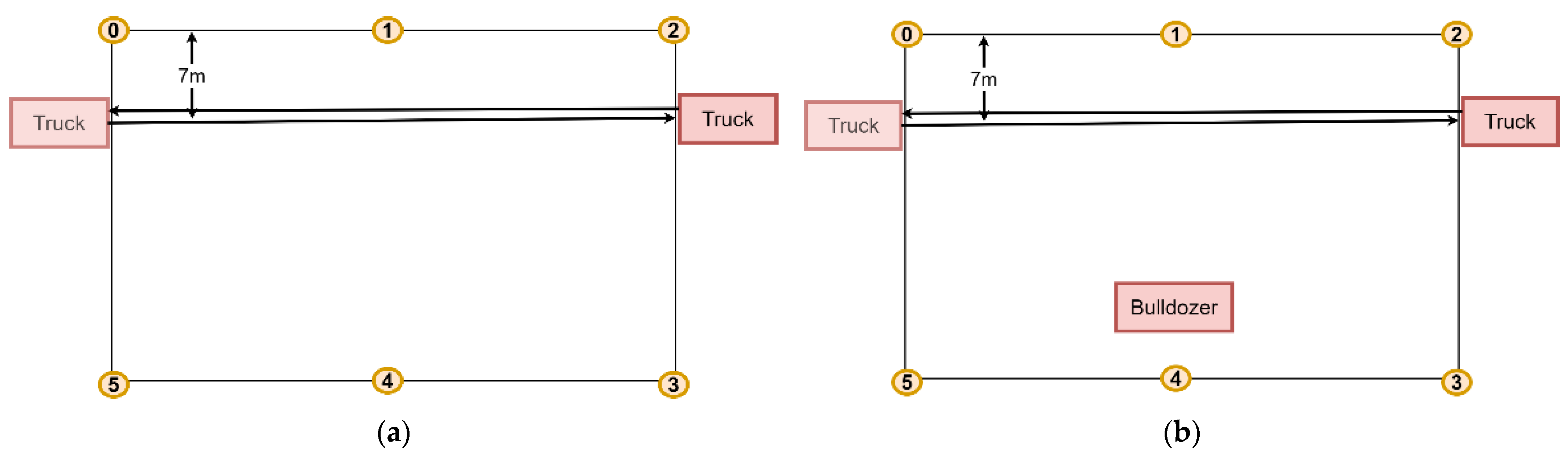
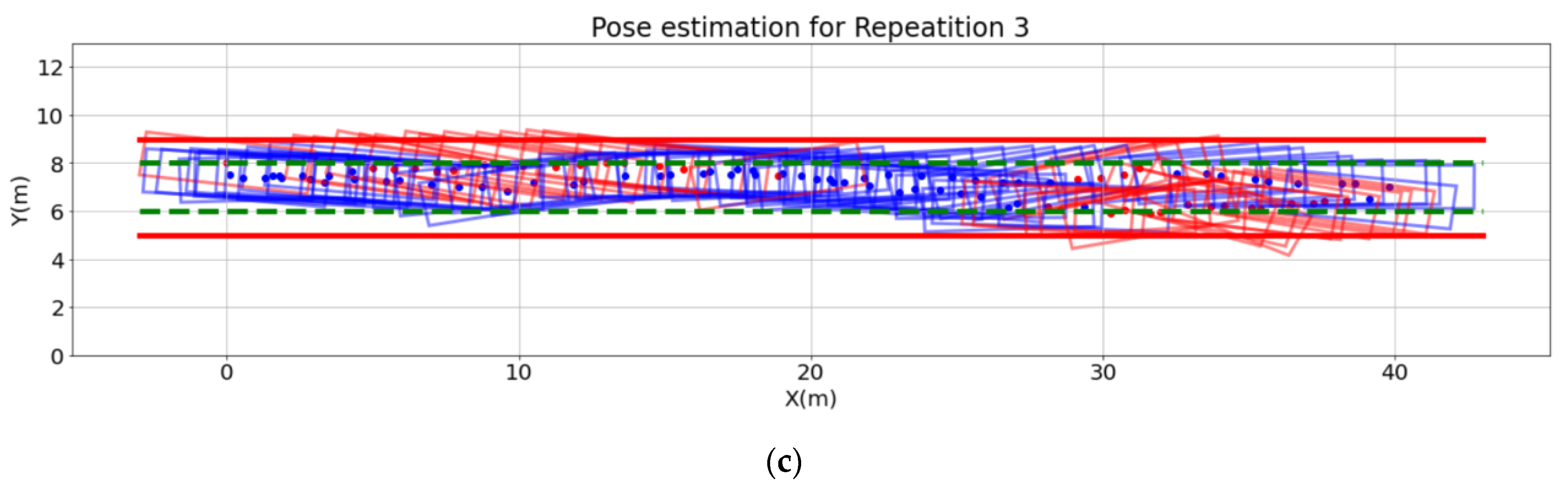
5.1. Experiment Setup
5.2. Implementation
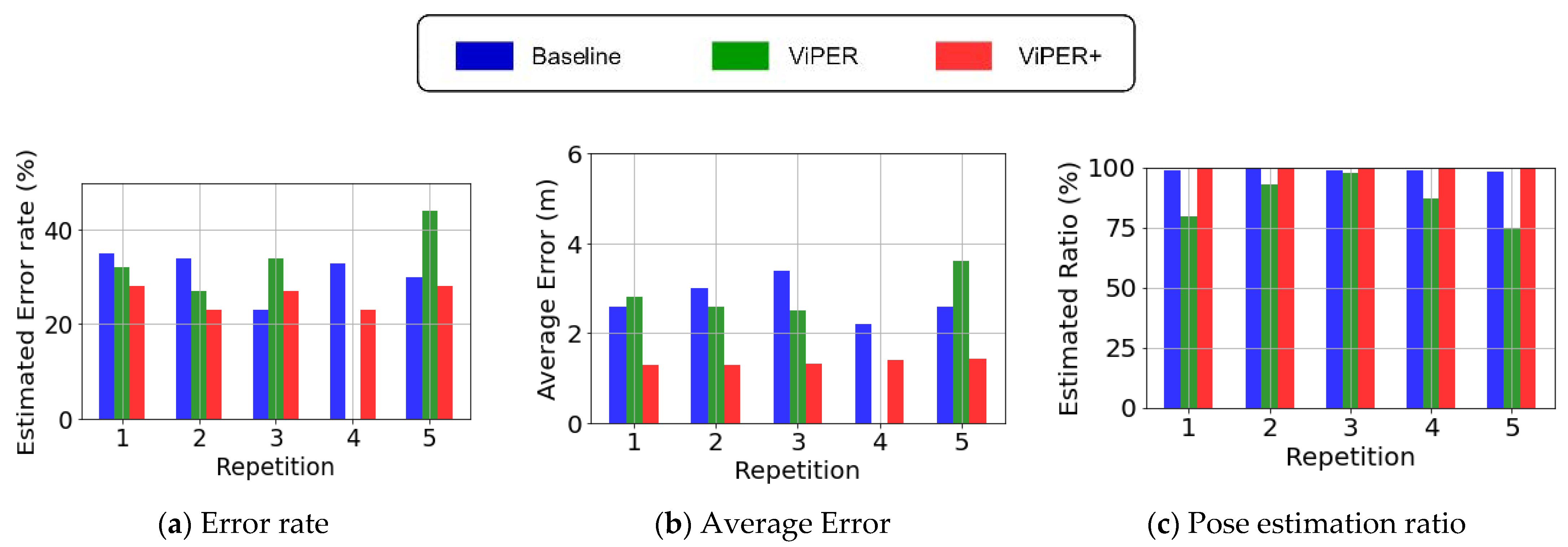
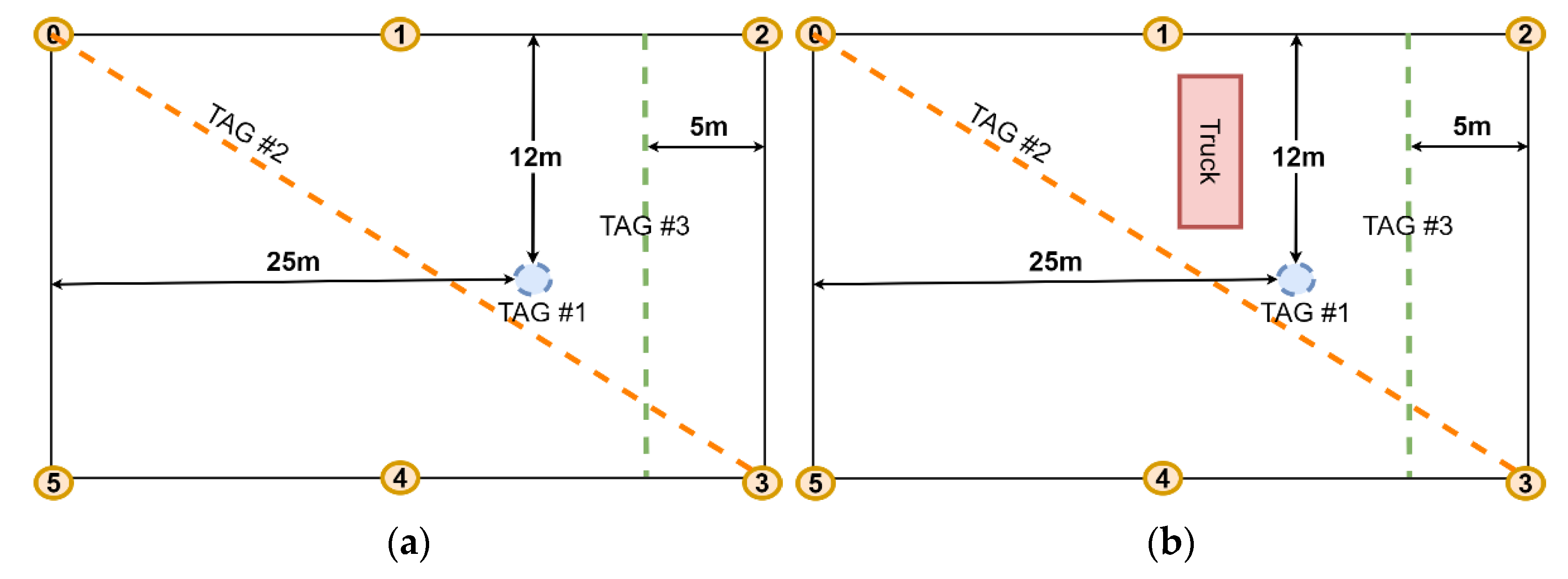
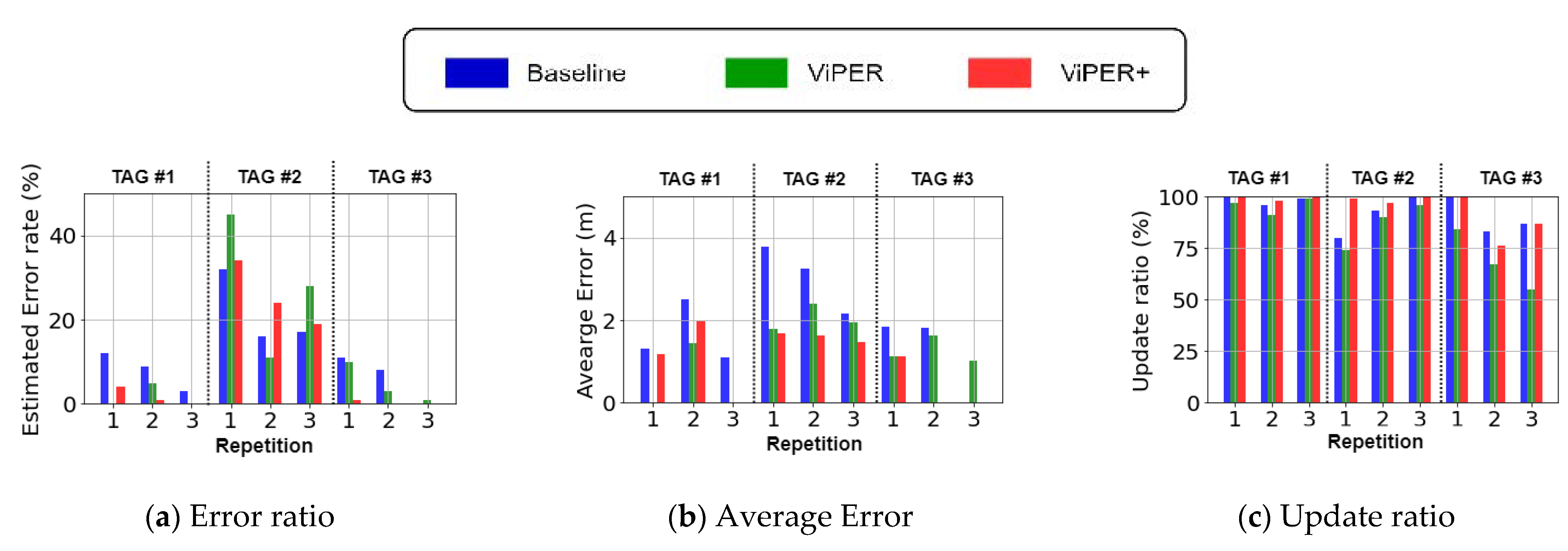
5.3. Evaluation Criteria
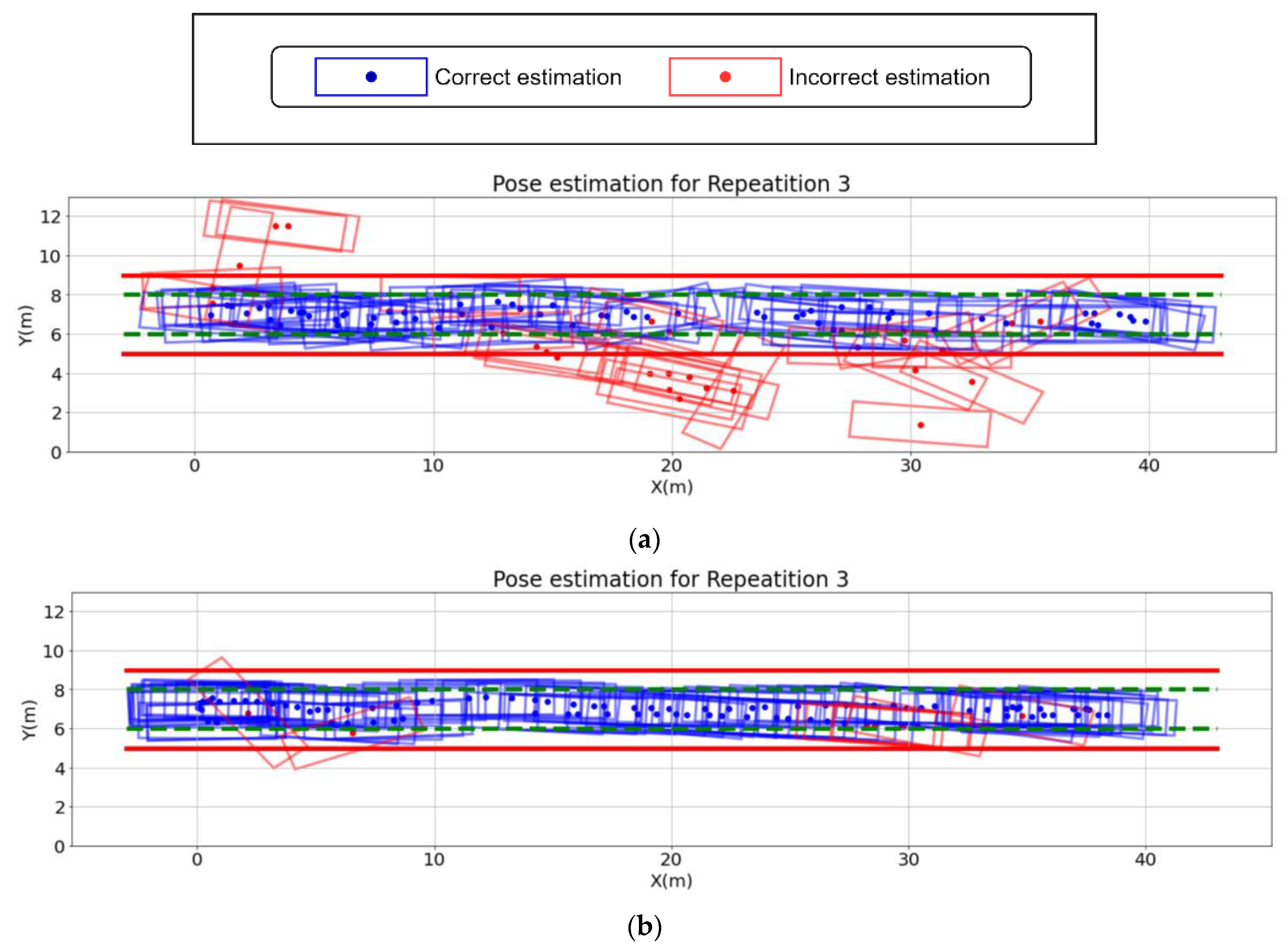
5.4. Pose Estimation for Vehicle Tracking
5.5. Single Tag Localization for Worker Tracking
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement:
Data Availability Statement
Conflicts of Interest
References
- Commonly Used Statistics | Occupational Safety and Health Administration. Available online: https://www.osha.gov/data/commonstats (accessed on 27 November 2022).
- Highway Work Zone Safety | NIOSH | CDC. Available online: https://www.cdc.gov/niosh/topics/highwayworkzones/default.html (accessed on 27 November 2022).
- Pegula, S. Workplace Safety and Health Fatal Occupational Injuries at Road Construction Sites, 2003-07. Available online: https://www.jstor.org/stable/monthlylaborrev.2010.11.037 (accessed on 27 November 2022).
- Regulations (Standards - 29 CFR) | Occupational Safety and Health Administration. Available online: https://www.osha.gov/laws-regs/regulations/standardnumber (accessed on 27 November 2022).
- Work Zone Safety Consortium Developing Internal Traffic Control Plans (ITCPs) for Work Zones. 2016. Available online: https://workzonesafety-media.s3.amazonaws.com/workzonesafety/files/documents/training/courses_programs/rsa_program/RSP_Guidance_Documents_Download/RSP_ITCP_Guidance_Download.pdf (accessed on 27 November 2022).
- Graham, J.L.; Burch, R. Internal Traffic Control Plans and Worker Safety Planning Tool. Transp. Res. Rec. 2006, 1948. [Google Scholar] [CrossRef]
- Albert, A.; Hallowell, M.R.; Kleiner, B.M. Enhancing Construction Hazard Recognition and Communication with Energy-Based Cognitive Mnemonics and Safety Meeting Maturity Model: Multiple Baseline Study. J. Constr. Eng. Manag. 2013. [Google Scholar] [CrossRef]
- Bahn, S. Workplace Hazard Identification and Management: The Case of an Underground Mining Operation. Saf. Sci. 2013, 57, 129–137. [Google Scholar] [CrossRef]
- Carter, G.; Smith, S.D. Safety Hazard Identification on Construction Projects. Constr. Eng. Manag. 2006, 132, 197–205. [Google Scholar] [CrossRef]
- Park, J.; Kim, K.; Cho, Y.K. Framework of Automated Construction-Safety Monitoring Using Cloud-Enabled BIM and BLE Mobile Tracking Sensors. J. Constr. Eng. Manag. 2017, 143, 05016019. [Google Scholar] [CrossRef]
- Park, J.; Chen, J.; Cho, Y.K. Self-Corrective Knowledge-Based Hybrid Tracking System Using BIM and Multimodal Sensors. Adv. Eng. Informatics 2017, 32, 126–138. [Google Scholar] [CrossRef]
- Carbonari, A.; Giretti, A.; Naticchia, B. A Proactive System for Real-Time Safety Management in Construction Sites. Autom. Constr. 2011, 20, 686–698. [Google Scholar] [CrossRef]
- Teizer, J.; Venugopal, M.; Walia, A. Ultrawideband for Automated Real-Time Three-Dimensional Location Sensing for Workforce, Equipment, and Material Positioning and Tracking. Transp. Res. Rec. J. Transp. Res. Board 2008, 56–64. [Google Scholar] [CrossRef]
- Fang, Y.; Cho, Y.K.; Zhang, S.; Perez, E. Case Study of BIM and Cloud–Enabled Real-Time RFID Indoor Localization for Construction Management Applications. J. Constr. Eng. Manag. 2016. [Google Scholar] [CrossRef]
- Park, J.; Marks, E.; Cho, Y.K.; Suryanto, W. Performance Test of Wireless Technologies for Personnel and Equipment Proximity Sensing in Work Zones. J. Constr. Eng. Manag. 2015, 142, 4015049. [Google Scholar] [CrossRef]
- Lu, M.; Chen, W.; Shen, X.; Lam, H.-C.; Liu, J. Positioning and Tracking Construction Vehicles in Highly Dense Urban Areas and Building Construction Sites. Autom. Constr. 2007, 16, 647–656. [Google Scholar] [CrossRef]
- Vahdatikhaki, F.; Hammad, A.; Siddiqui, H. Optimization-Based Excavator Pose Estimation Using Real-Time Location Systems. Autom. Constr. 2015. [Google Scholar] [CrossRef]
- Silva, B.; Pang, Z.; Åkerberg, J.; Neander, J.; Hancke, G. Experimental Study of UWB-Based High Precision Localization for Industrial Applications. In Proceedings of the Ultra-WideBand (ICUWB), Paris, France, 1–3 September 2014; pp. 280–285. [Google Scholar]
- Decawave None Line of Sight Operations and Optimizations to Improve Performance in DW1000 Based Systems. Available online: https://www.qorvo.com/products/d/da008450 (accessed on 27 November 2022).
- Heydariaan, M.; Mohammadmoradi, H.; Gnawali, O. Toward Standard Non-Line-of-Sight Benchmarking of Ultra-Wideband Radio-Based Localization. In Proceedings of the Proceedings-2018 1st Workshop on Benchmarking Cyber-Physical Networks and Systems, CPSBench 2018. Porto, Portugal, 10–13 April 2018. [Google Scholar]
- Gururaj, K.; Rajendra, A.K.; Song, Y.; Law, C.L.; Cai, G. Real-Time Identification of NLOS Range Measurements for Enhanced UWB Localization. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation, IPIN 2017. Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Yu, K.; Wen, K.; Li, Y.; Zhang, S.; Zhang, K. A Novel NLOS Mitigation Algorithm for UWB Localization in Harsh Indoor Environments. IEEE Trans. Veh. Technol. 2019. [Google Scholar] [CrossRef]
- Li, X.; Wang, Y. Research on the UWB/IMU Fusion Positioning of Mobile Vehicle Based on Motion Constraints. Acta Geod. Geophys. 2020, 1–19. [Google Scholar] [CrossRef]
- Strohmeier, M.; Walter, T.; Rothe, J.; Montenegro, S. Ultra-Wideband Based Pose Estimation for Small Unmanned Aerial Vehicles. IEEE Access 2018, 6, 57526–57535. [Google Scholar] [CrossRef]
- Barral, V.; Suárez-Casal, P.; Escudero, C.J.; García-Naya, J.A. Multi-Sensor Accurate Forklift Location and Tracking Simulation in Industrial Indoor Environments. Electronics 2019, 8, 1152. [Google Scholar] [CrossRef]
- Mikov, A.; Moschevikin, A.; Voronov, R. Vehicle Dead-Reckoning Autonomous Algorithm Based on Turn Velocity Updates in Kalman Filter. In Proceedings of the 27th Saint Petersburg International Conference on Integrated Navigation Systems, ICINS 2020-Proceedings. St. Petersburg, Russia, 25–27 May 2020. [Google Scholar]
- Zhang, R.G.; Shen, F.; Li, Q.H. A Hybrid Indoor/Outdoor Positioning and Orientation Solution Based on INS, UWB and Dual-Antenna RTK-GNSS. In Proceedings of the 2020 27th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), St. Petersburg, Russia, 25–27 May 2020; pp. 1–5. [Google Scholar]
- Li, M.G.; Zhu, H.; You, S.Z.; Tang, C.Q. UWB-Based Localization System Aided with Inertial Sensor for Underground Coal Mine Applications. IEEE Sens. J. 2020. [Google Scholar] [CrossRef]
- Han, Y.; Wei, C.; Li, R.; Wang, J.; Yu, H. A Novel Cooperative Localization Method Based on IMU and UWB. Sensors 2020, 20, 467. [Google Scholar] [CrossRef]
- Competent Person - Overview | Occupational Safety and Health Administration. Available online: https://www.osha.gov/competent-person (accessed on 27 November 2022).
- Sulankivi, K.; Kähkönen, K.; Mäkelä, T.; Kiviniemi, M. 4D-BIM for Construction Safety Planning. In Proceedings of the W099-Special Track 18th CIB World Building Congress, Manchester, UK, 10–13 May 2010; 2010; pp. 117–128. [Google Scholar]
- Zhang, S.; Teizer, J.; Lee, J.-K.; Eastman, C.M.; Venugopal, M. Building Information Modeling (BIM) and Safety: Automatic Safety Checking of Construction Models and Schedules. Autom. Constr. 2013, 29, 183–195. [Google Scholar] [CrossRef]
- Kim, K.; Cho, Y.K.; Zhang, S. Integrating Work Sequences and Temporary Structures into Safety Planning: Automated Scaffolding-Related Safety Hazard Identification and Prevention in BIM. Autom. Constr. 2016, 70, 128–142. [Google Scholar] [CrossRef]
- Lee, U.-K.; Kim, J.-H.; Cho, H.; Kang, K.-I. Development of a Mobile Safety Monitoring System for Construction Sites. Autom. Constr. 2009, 18, 258–264. [Google Scholar] [CrossRef]
- Cheng, T.; Venugopal, M.; Teizer, J.; Vela, P.A. Performance Evaluation of Ultra Wideband Technology for Construction Resource Location Tracking in Harsh Environments. Autom. Constr. 2011, 20, 1173–1184. [Google Scholar] [CrossRef]
- Shahi, A.; Aryan, A.; West, J.S.; Haas, C.T.; Haas, R.C.G. Deterioration of UWB Positioning during Construction. Autom. Constr. 2012, 24, 72–80. [Google Scholar] [CrossRef]
- Esmaeilnejad, S. Accuracy Assessment of UWB RTLS for Tracking Resources on Construction Sites; University of Calgary: Calgary, AB, Canada, 2015. [Google Scholar]
- Wang, J.; Raja, A.K.; Pang, Z. Prototyping and Experimental Comparison of IR-UWB Based High Precision Localization Technologies. In Proceedings of the Ubiquitous Intelligence and Computing and 2015 IEEE 12th Intl Conf on Autonomic and Trusted Computing and 2015 IEEE 15th Intl Conf on Scalable Computing and Communications and Its Associated Workshops (UIC-ATC-ScalCom), Beijing, China, 10–14 August 2015; pp. 1187–1192. [Google Scholar]
- Hwang, S. Ultra-Wide Band Technology Experiments for Real-Time Prevention of Tower Crane Collisions. Autom. Constr. 2012, 22, 545–553. [Google Scholar] [CrossRef]
- Pittokopiti, M.; Grammenos, R. Infrastructureless UWB Based Collision Avoidance System for the Safety of Construction Workers. In Proceedings of the 2019 26th International Conference on Telecommunications, ICT 2019. Hanoi, Vietnam, 8–10 April 2019. [Google Scholar]
- Ghanem, E.; O’Keefe, K.; Klukas, R. Estimating Vehicle-to-Vehicle Relative Position and Attitude Using Multiple UWB Ranges. In Proceedings of the CEUR Workshop Proceedings, Victoria, BC, Canada, 18 November 2020–16 December 2020. [Google Scholar]
- Wang, M.; Zhou, A.; Chen, X.; Shen, Y.; Li, Z. A Novel Asynchronous UWB Positioning System for Autonomous Trucks in an Automated Container Terminal. SAE Tech. Pap. 2020, 2, 3413–3422. [Google Scholar] [CrossRef]
- Zhang, C.; Hammad, A.; Rodriguez, S. Crane Pose Estimation Using UWB Real-Time Location System. J. Comput. Civ. Eng. 2012, 26, 625–637. [Google Scholar] [CrossRef]
- Ansaripour, A.; Heydariaan, M.; Gnawali, O.; Kim, K. ViPER: Vehicle Pose Estimation Using Ultra-Wideband Radios. In Proceedings of the 2020 16th International Conference on Distributed Computing in Sensor Systems (DCOSS), Marina del Rey, CA, USA, 25–27 May 2020. [Google Scholar]
- Hara, S.; Anzai, D.; Yabu, T.; Lee, K.; Derham, T.; Zemek, R. A Perturbation Analysis on the Performance of TOA and TDOA Localization in Mixed LOS/NLOS Environments. IEEE Trans. Commun. 2013, 61, 679–689. [Google Scholar] [CrossRef]
- Xu, Q.; Lei, Y.; Cao, J.; Wei, H. An Improved Algorithm Based on Reference Selection for Time Difference of Arrival Location. In Proceedings of the 2014 7th International Congress on Image and Signal Processing, Dalian, China, 14–16 October 2014; pp. 953–957. [Google Scholar] [CrossRef]
- Rene, J.E.; Ortiz, D.; Venegas, P.; Vidal, J. Selection of the Reference Anchor Node by Using SNR in TDOA-Based Positioning. In Proceedings of the 2016 IEEE Ecuador Technical Chapters Meeting (ETCM), Guayaquil, Ecuador, 12–14 October 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Maranò, S.; Gifford, W.M.; Wymeersch, H.; Win, M.Z. NLOS Identification and Mitigation for Localization Based on UWB Experimental Data. IEEE J. Sel. Areas Commun. 2010, 28, 1026–1035. [Google Scholar] [CrossRef]
- Yang, X. NLOS Mitigation for UWB Localization Based on Sparse Pseudo-Input Gaussian Process. IEEE Sens. J. 2018, 18, 4311–4316. [Google Scholar] [CrossRef]
- DecaWave Evk1000 User Manual How To Use, Configure and Interface To the Dw1000. 2013, 1–21. Available online: https://datasheet.octopart.com/EVK1000-Decawave-datasheet-86813690.pdf (accessed on 27 November 2022).
- Guvenc, I.; Chong, C.C.; Watanabe, F. NLOS Identification and Mitigation for UWB Localization Systems. IEEE Wirel. Commun. Netw. Conf. WCNC 2007, 1573–1578. [Google Scholar] [CrossRef]
- Heidari, M.; Pahlavan, K. Identification of the Absence of Direct Path in ToA-Based Indoor Localization Systems. Int. J. Wirel. Inf. Networks 2008, 15, 117–127. [Google Scholar] [CrossRef]
- Mucchi, L.; Marcocci, P. A New Parameter for UWB Indoor Channel Profile Identification. IEEE Trans. Wirel. Commun. 2009, 8, 1597–1602. [Google Scholar] [CrossRef]
- Wann, C.D.; Hsueh, C.S. NLOS Mitigation with Biased Kalman Filters for Range Estimation in UWB Systems. In Proceedings of the TENCON 2007–2007 IEEE Region 10 Conference, Taipei, Taiwan, 30 October 2007–2 November 2007. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description |
|---|---|
| Location of anchor a | |
| (x, y) | Location of the tag |
| TDOA input for anchor a |
| Parameters | Description |
|---|---|
| (x, y) | Location of the vehicle |
| Orientation of the vehicle | |
| T | Number of tags mounted on the vehicle |
| Number of locations from tag i | |
| () | jth location of tag i |
| Position of tags relative to the center of the vehicle |
| Pose Estimation Method | Estimated Error Ratio (%) | Average Error (m) | Update Ratio (%) |
|---|---|---|---|
| Baseline | 24 | 3.4 | 99 |
| ViPER | 9 | 2.6 | 95 |
| ViPER+ | 19 | 1.6 | 99 |
| Pose Estimation Method | Estimated Error Ratio (%) | Average Error (m) | Update Ratio (%) |
|---|---|---|---|
| Baseline | 31 | 2.8 | 98 |
| ViPER | 27 | 2.3 | 86 |
| ViPER+ | 26 | 1.4 | 99 |
| Localization Method | Estimated Error Ratio (%) | Average Error (m) | Update Ratio (%) | |||
|---|---|---|---|---|---|---|
| Static Tag | Moving Tags | Static Tag | Moving Tags | Static Tag | Moving Tags | |
| Baseline | 8 | 12 | 1.3 | 2 | 99 | 93 |
| ViPER | 2 | 11 | 0.5 | 1.3 | 96 | 84 |
| ViPER+ | 2 | 9 | 1.1 | 1 | 99 | 95 |
| Localization Method | Estimated Error Ratio (%) | Average Error (m) | Update Ratio (%) | |||
|---|---|---|---|---|---|---|
| Static Tag | Moving Tags | Static Tag | Moving Tags | Static Tag | Moving Tags | |
| Baseline | 19 | 15 | 1.7 | 2.2 | 97 | 96 |
| ViPER | 9 | 10 | 1.3 | 1.2 | 86 | 75 |
| ViPER+ | 5 | 9 | 1.2 | 1.2 | 99 | 99 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ansaripour, A.; Heydariaan, M.; Kim, K.; Gnawali, O.; Oyediran, H. ViPER+: Vehicle Pose Estimation Using Ultra-Wideband Radios for Automated Construction Safety Monitoring. Appl. Sci. 2023, 13, 1581. https://doi.org/10.3390/app13031581
Ansaripour A, Heydariaan M, Kim K, Gnawali O, Oyediran H. ViPER+: Vehicle Pose Estimation Using Ultra-Wideband Radios for Automated Construction Safety Monitoring. Applied Sciences. 2023; 13(3):1581. https://doi.org/10.3390/app13031581
Chicago/Turabian StyleAnsaripour, Alireza, Milad Heydariaan, Kyungki Kim, Omprakash Gnawali, and Hafiz Oyediran. 2023. "ViPER+: Vehicle Pose Estimation Using Ultra-Wideband Radios for Automated Construction Safety Monitoring" Applied Sciences 13, no. 3: 1581. https://doi.org/10.3390/app13031581
APA StyleAnsaripour, A., Heydariaan, M., Kim, K., Gnawali, O., & Oyediran, H. (2023). ViPER+: Vehicle Pose Estimation Using Ultra-Wideband Radios for Automated Construction Safety Monitoring. Applied Sciences, 13(3), 1581. https://doi.org/10.3390/app13031581