
Mechanism Optimization of the Clamping and Cutting Arrangement Device for Solanaceae Scion and Stock Seedlings


Abstract
1. Introduction
2. Materials and Methods
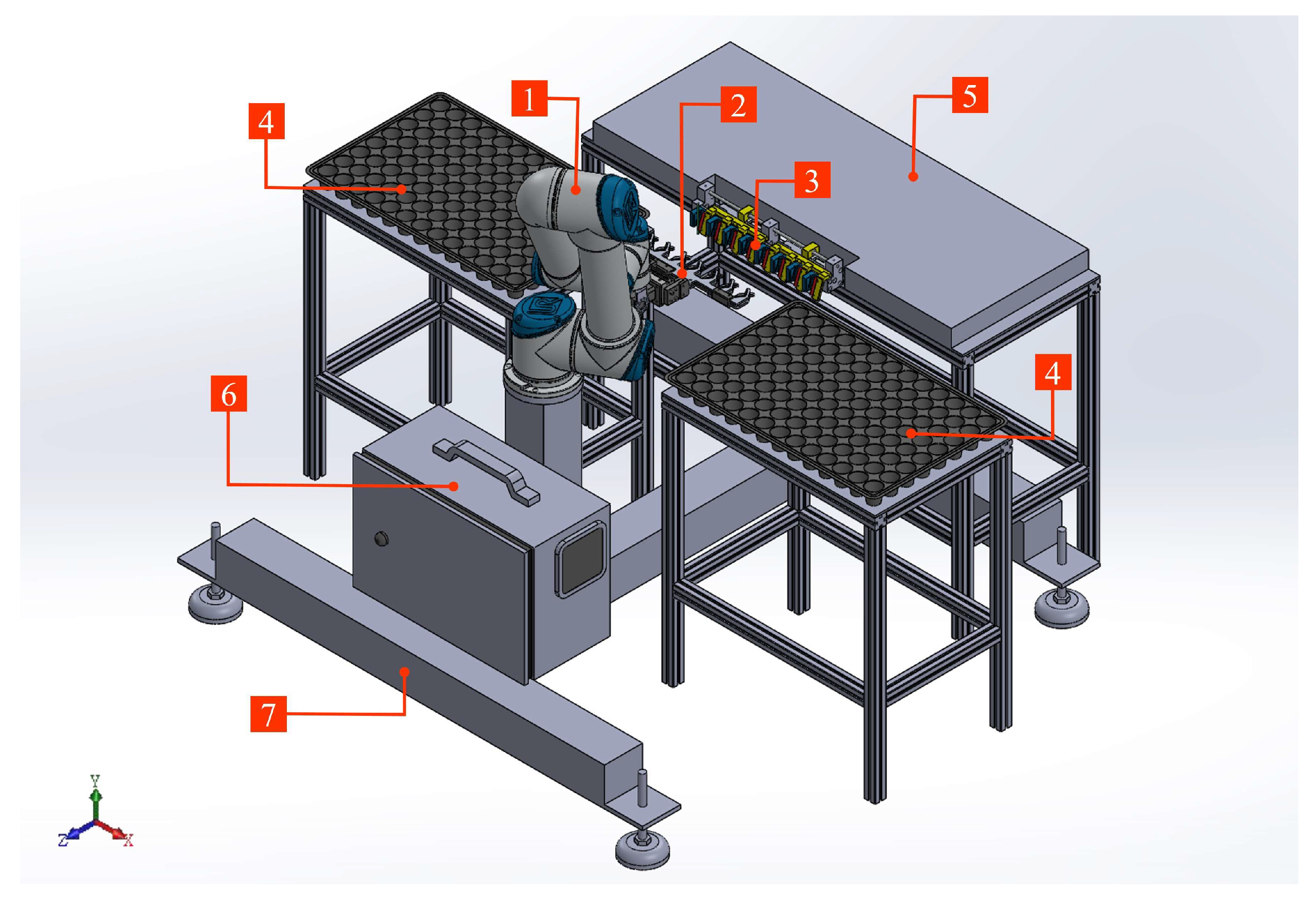
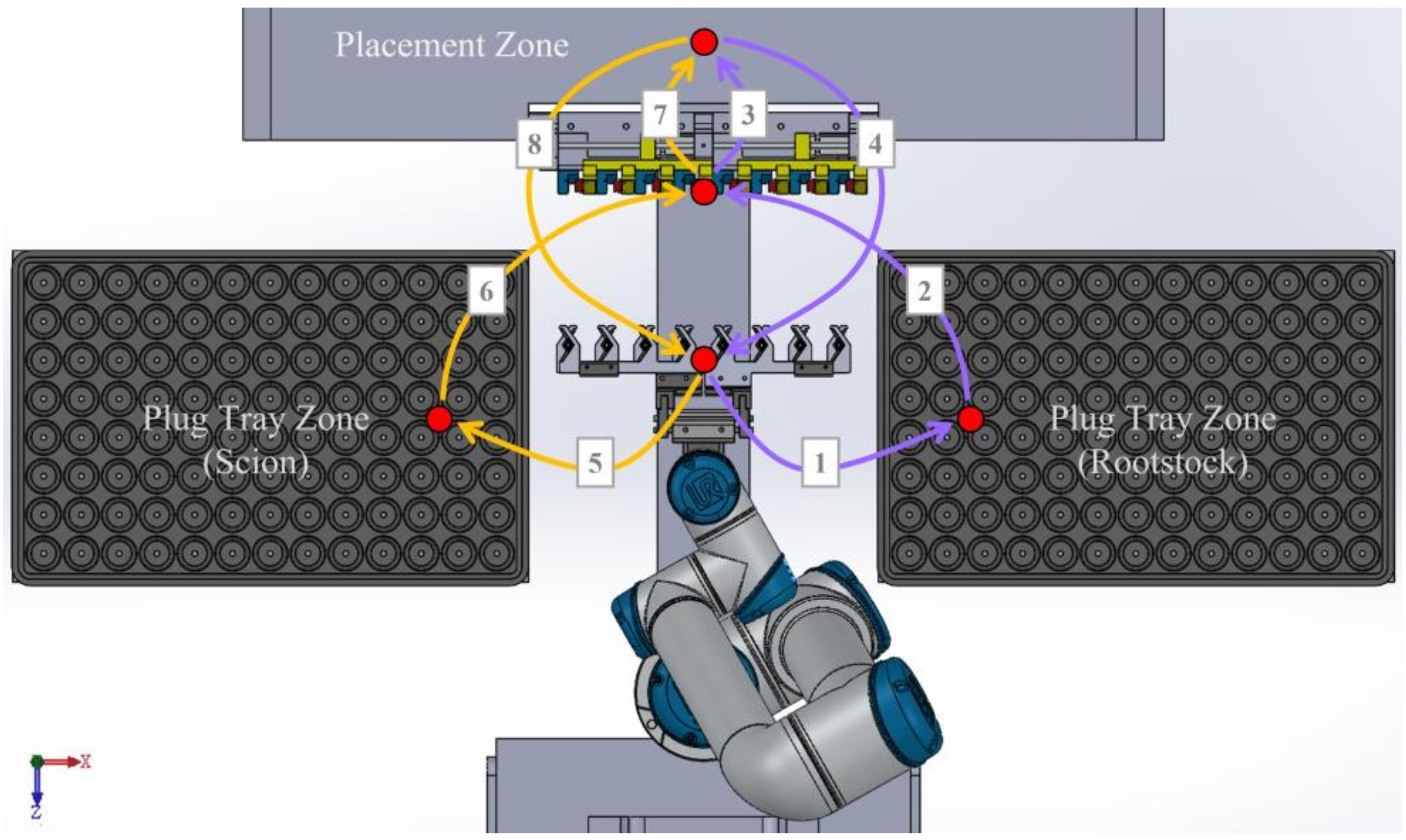
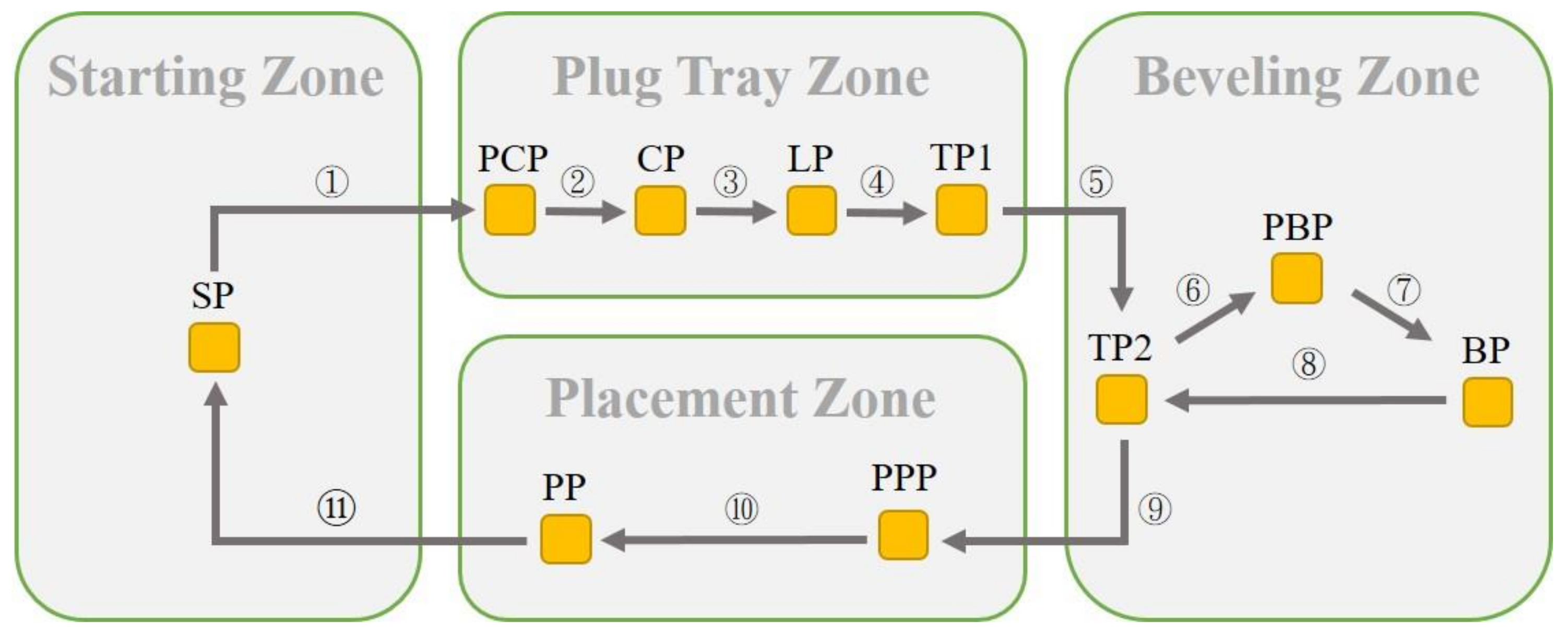
2.1. Institutional Design and Operational Process
- Multiple-type grafting operation: Compared with clamping a single plant before beveling, by clamping multiple seedlings—that is, four or eight at a time—the operational efficiency of the grafting process can be improved.
- Standardization of clamping and chamfering: the proposed device can align the seedlings, position them, and produce a consistent chamfering angle.
- Plug-tray specifications: The proposed device complies with the plug-tray specifications used by seedling growers in Taiwan—that is, it caters to 104 grid plug trays (8 × 13) in bulk.
- Applicable to tomato seedlings and eggplant seedlings: The proposed device is not limited to the use of single crop seedlings, its operation being more flexible.
2.2. Test Materials and Grafting Conditions
2.3. Module Optimization Experiment
2.3.1. Clamping Test
2.3.2. Oblique Cut Test
3. Results and Discussion
3.1. Clamping Test
- Seedlings loosened when pulled up from the plug, accounting for 6.37% of the total clamping, which occurred when the RG2 electric clamper clamped eggplant seedlings.
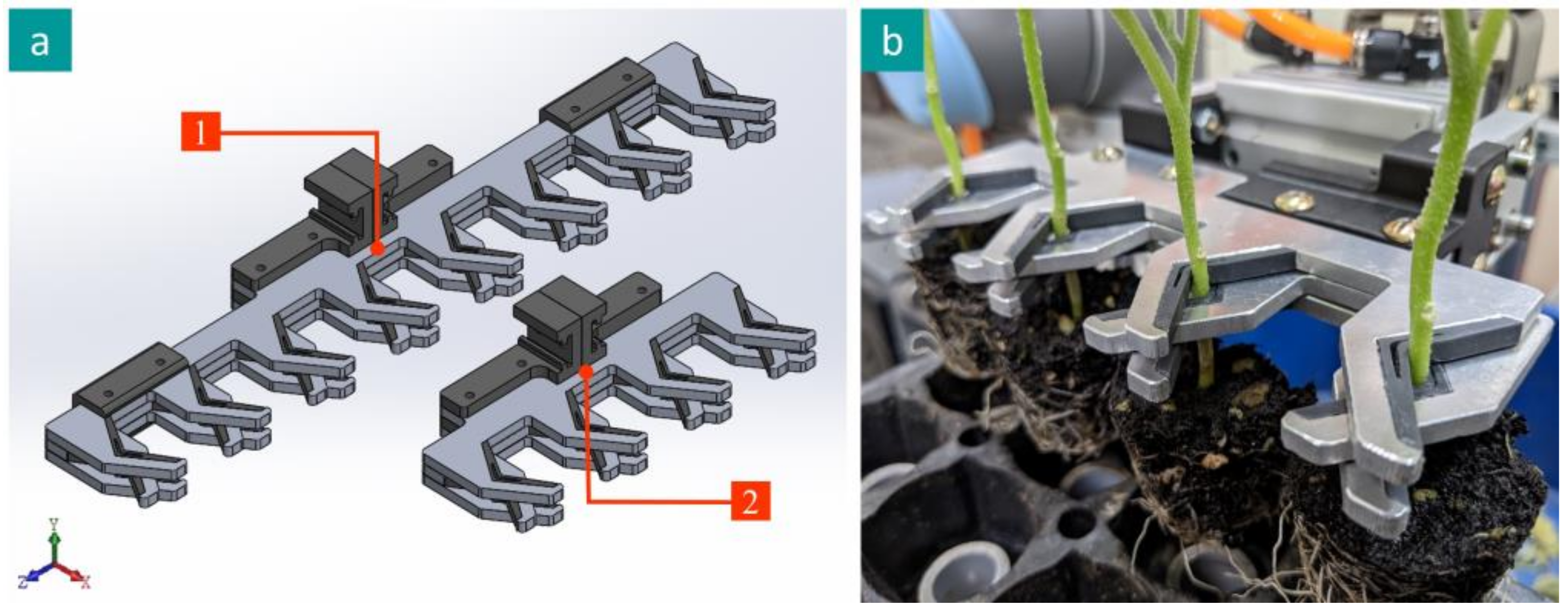
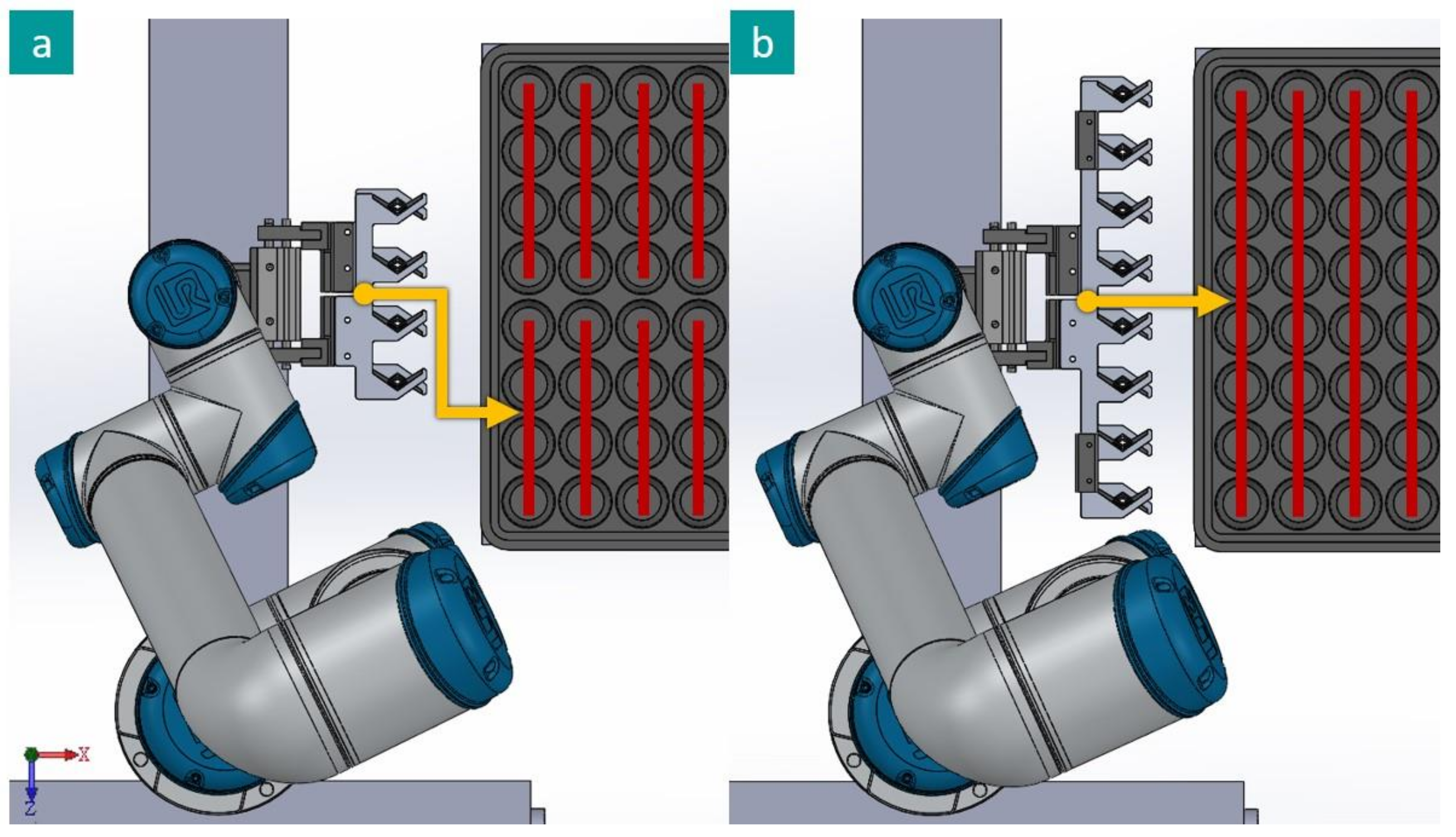
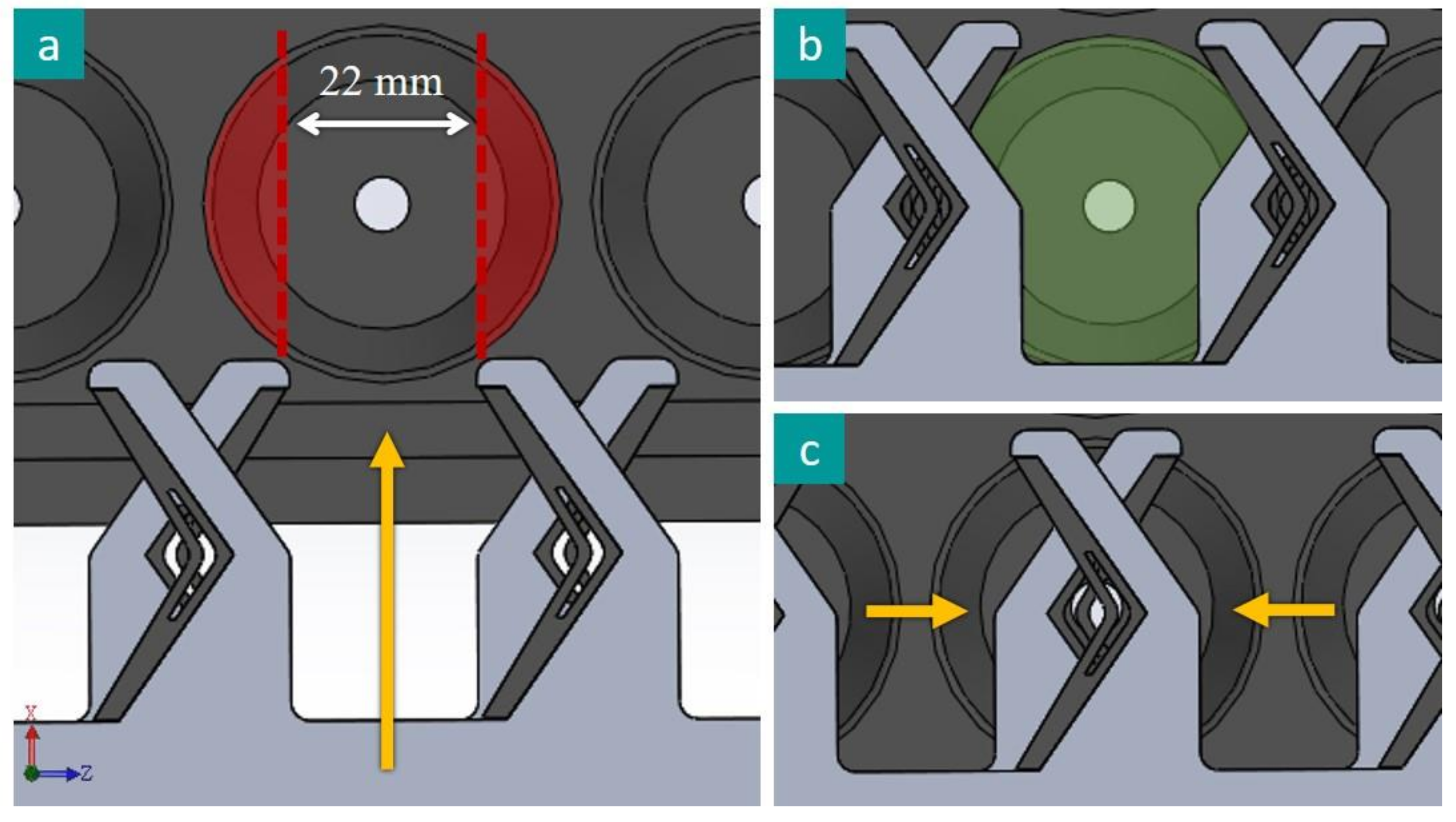
- The seedlings were located at the edge or corner of holes, so the clamping structure could not clamp them effectively, accounting for 1.2% of the clamping total. The clamping process and range of the clamping structure are as shown in Figure 9.
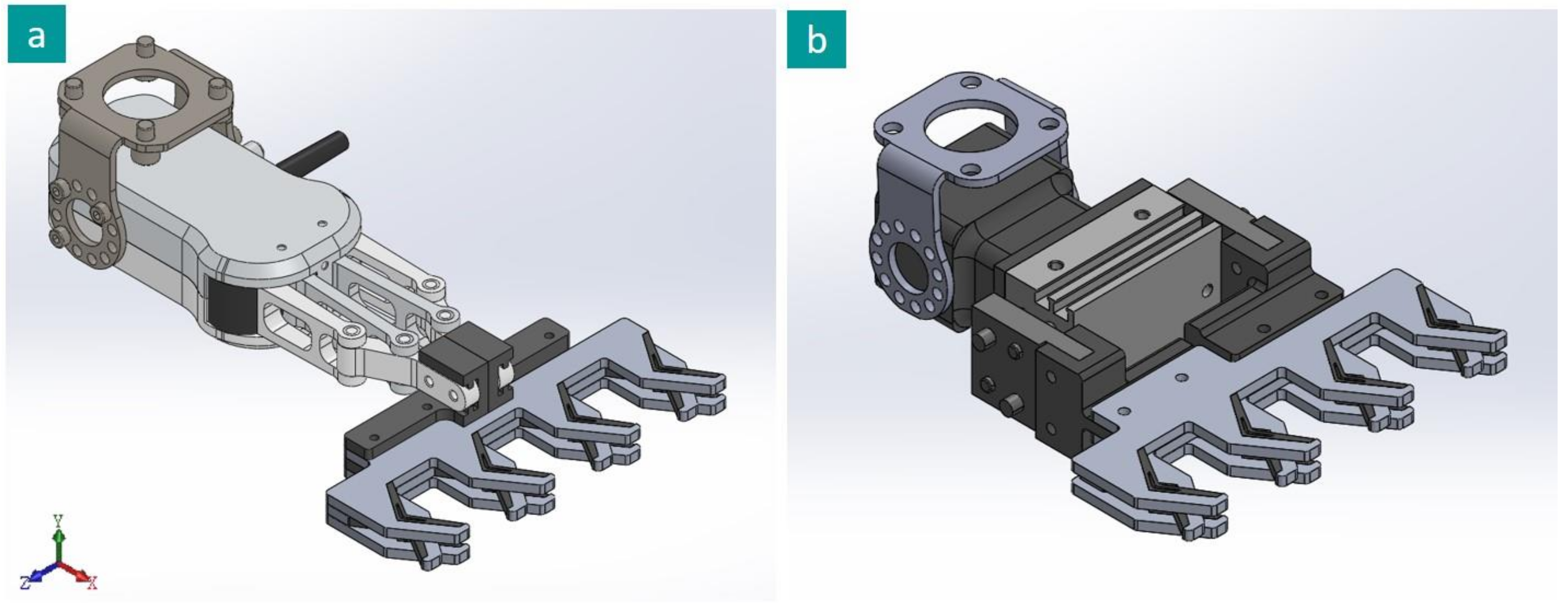
- The MHL2 gripper grips in a parallel path, and the RG2 gripper grips in an arcuate path of radius 55 mm. The path of the MHL2 gripper is simpler than that of the RG2 gripper, reducing the potential for gripping failure caused by the position of the seedling.
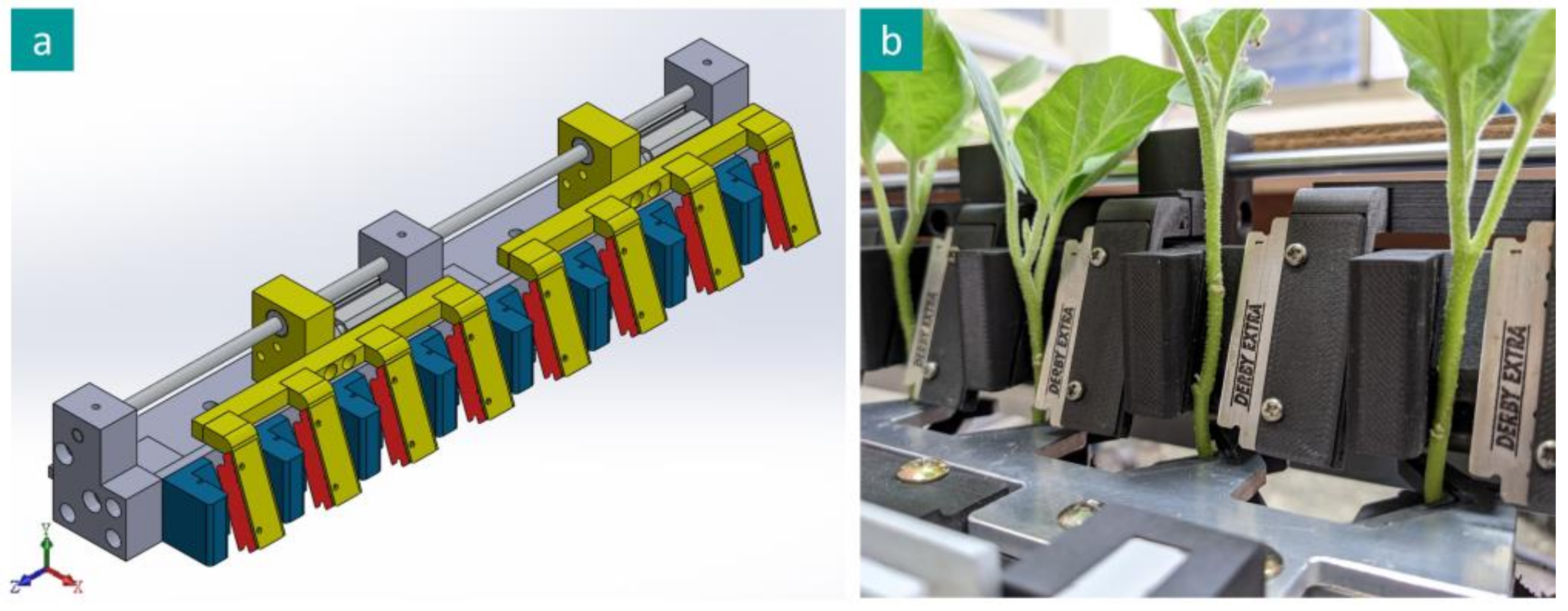
- The RG2 gripper is driven electrically and has a force sensor. When the force reaches the upper limit, it stops clamping, and the set distance cannot be reached. Consequently, the seedlings are pulled up from the plug before the clamping is complete, causing clamping failure. The MHL2 gripper is powered pneumatically and does not have a force sensor, allowing it to reach the set distance when gripping. The design of the clamping structure in this study has soft pads to avoid clamping damage.
- Overall, the proposed clamping structure could effectively clamp seedlings regardless of whether the electric RG2 or pneumatic MHL2 structure was used, the unclamped seedlings only accounting for 1.2% of the clamping total. The RG2 electric gripper had the advantages of stroke flexibility, force sensing, and could be combined with the UR5 robotic arm, but the gripping success rate in the 8-jaw mode was not good. The design goal of the clamping structure in this study is to be able to clamp multiple seedlings. Consequently, the MHL2 pneumatic clamp with its high clamping success rate was selected for subsequent oblique cutting tests. It could be expected to consistently clamp multiple seedlings, and exhibit high clamping and oblique cutting success rates.
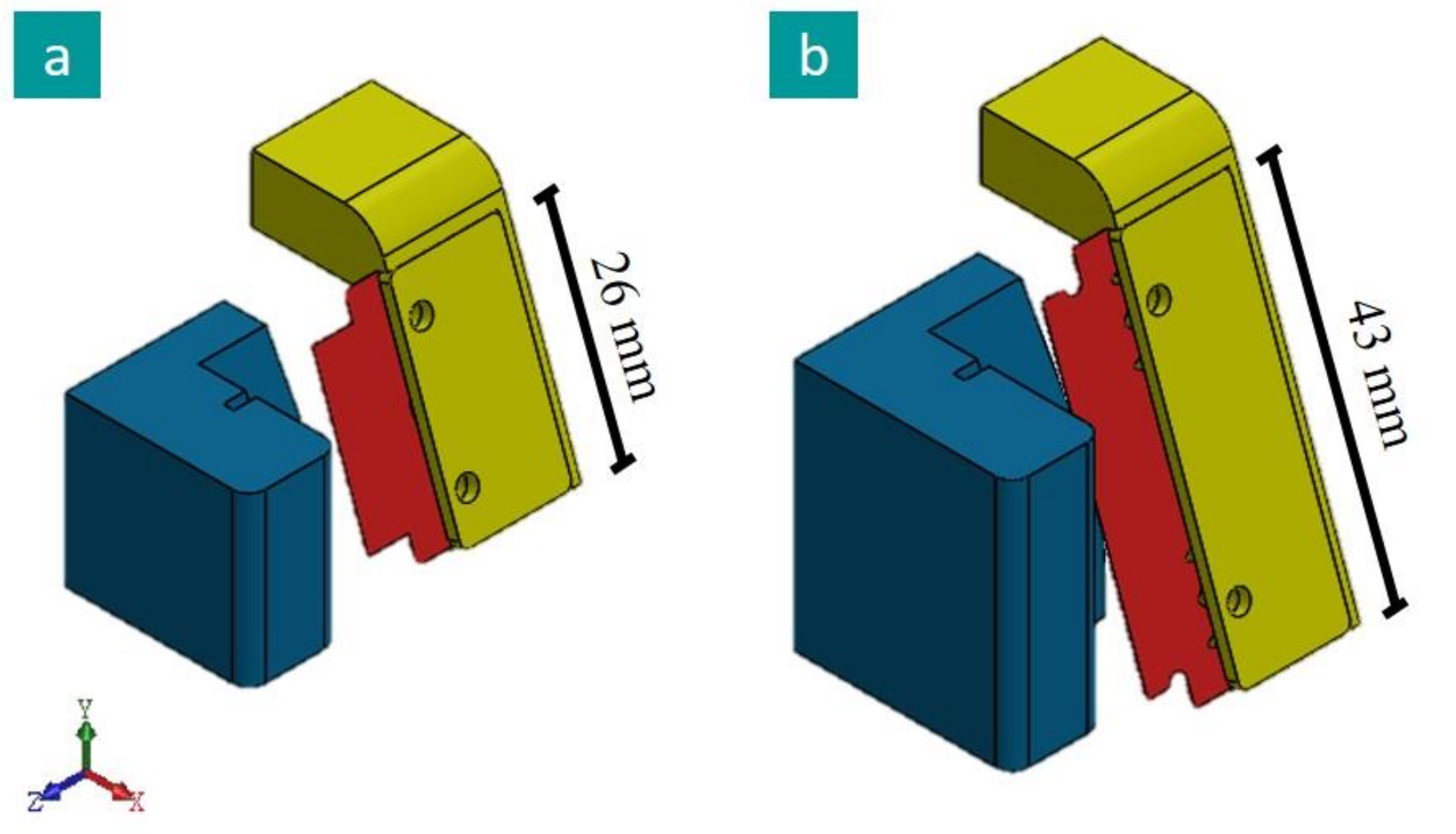
3.2. Oblique Cut Test
3.3. Operating Speed
3.4. Survival Rate of Grafted Seedlings
- Differences in the bevel angles of the scion and stock seedlings: The seedling trait differences and sowing positions all affect the bevel angle, especially for eggplant seedlings. Slanted or knotted stems at the clamping position affect the beveling angle, resulting in poor adhesion between the scion and beveled rootstock, poor cell healing and cambium connection between the two, resulting in graft failure.
- Grafting time and healing environment: The scion and rootstock should be joined immediately after the seedlings are cut obliquely, because when the seedlings are injured, a gangrene layer forms to help the joints bind. If the scion and rootstock are not joined immediately after beveling, the water on the beveled surface evaporates over time and the cells die, which affects the healing of the grafted seedlings [22]. Consequently, it is recommended that the grafted seedlings are sent to the healing room within half an hour of completing the grafting process. The healing room environment should be in high humidity conditions (85–95% RH), which is conducive to the formation of callus and healing.
- Differences in oblique cutting position of the root anvil: Grafted seedlings whose oblique cutting position is above the cotyledon exhibit better growth performance than grafted seedlings whose oblique cutting position is below the cotyledon, but the difference in position has no effect on their survival [23]. However, grafted seedlings whose root anvil is obliquely cut above the cotyledon will produce new branches on the root anvil, which need to be removed from time to time, increasing labor costs. Consequently, it is recommended that the oblique cut position of the root anvil be below the cotyledon to avoid unnecessary branch growth [24].
3.5. Economic Benefit
4. Conclusions
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- FAOSTAT 2019 Database. Available online: http://www.fao.org/faostat/zh/#data (accessed on 20 September 2021).
- Lee, J.-M.; Kubota, C.; Tsao, S.J.; Bie, Z.; Echevarria, P.H.; Morra, L.; Oda, M. Current status of vegetable grafting: Diffusion, grafting techniques, automation. Sci. Hortic. 2010, 127, 93–105. [Google Scholar] [CrossRef]
- Kumar, P.; Rouphael, Y.; Cardarelli, M.; Colla, G. Vegetable grafting as a tool to improve drought resistance and water use efficiency. Front. Plant Sci. 2017, 8, 1130. [Google Scholar] [CrossRef] [PubMed]
- Salaria, M.; Relhan, A.; Rawat, M. Grafting as a strategy for the improvement of cucurbits and Solanaceous vegetables: A review. Plant Arch. 2020, 20, 6201–6206. [Google Scholar]
- Urlić, B.; Runjić, M.; Mandušić, M.; Žanić, K.; Selak, G.V.; Matešković, A.; Dumičić, G. Partial root-zone drying and deficit irrigation effect on growth, yield, water use and quality of greenhouse grown grafted tomato. Agronomy 2020, 10, 1297. [Google Scholar] [CrossRef]
- Rouphael, Y.; Venema, J.H.; Edelstein, M.; Savvas, D.; Colla, G.; Ntatsi, G.; Ben-Hur, M.; Kumar, P.; Schwarz, D. Grafting as a tool for tolerance of abiotic stress. In Vegetable Grafting: Principles and Practices; Colla, G., Pérez-Alfocea, F., Schwarz, D., Eds.; CAB International: Oxfordshire, UK, 2017; pp. 171–215. [Google Scholar]
- Singh, H.; Kumar, P.; Kumar, A.; Kyriacou, M.C.; Colla, G.; Rouphael, Y. Grafting tomato as a tool to improve salt tolerance. Agronomy 2020, 10, 263. [Google Scholar] [CrossRef]
- Kyriacou, M.C.; Rouphael, Y.; Colla, G.; Zrenner, R.M.; Schwarz, D. Vegetable grafting: The implications of a growing agronomic imperative for vegetable fruit quality and nutritive value. Front. Plant Sci. 2017, 8, 741. [Google Scholar] [CrossRef] [PubMed]
- Singh, H.; Kumar, P.; Chaudhari, S.; Edelstein, M. Tomato grafting: A global perspective. HortScience 2017, 52, 1328–1336. [Google Scholar] [CrossRef]
- Rouphael, Y.; Kyriacou, M.; Colla, G. Vegetable grafting: A toolbox for securing yield stability under multiple stress conditions. Front. Plant Sci. 2018, 8, 2255. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.T.; Hseu, S.H. Production of tomato with grafting seedlings under protected cultivation. In Proceedings of the Symposium on Pest Management and Safety of Facility Cultivation; Taiwan Agricultural Research Institute: Taichung, Taiwan, 2017; pp. 64–75. [Google Scholar]
- Chang, C.Y.; Tien, Y.S.; Lin, H.S. Symposium on New Trends of Seedling Industry Development; Tainan District Agricultural Research and Extension Station, COA: Tainan, Taiwan, 2015; pp. 99–106. [Google Scholar]
- Chen, W.L.; Pai, K.F.; Yang, J.L. Vegetable Grafted Seedling Production and Mechanical Application Technology; Taichung District Agricultural Research and Extension Station, COA: Taichung, Taiwan, 2016. [Google Scholar]
- Chang, C.Y.; Tien, Y.S. Development and application of conveyor type grafting auxiliary machinery. In Proceeding of 2019 Symposium on Development and Application on Labor-Saving Agricultural Machinery; Taichung District Agricultural Research and Extension Station, COA: Taichung, Taiwan, 2019. [Google Scholar]
- Hung, Y.C.; Chang, C.Y.; Tien, Y.S. Development and Application of the Arrangement Device of Clamping and Cutting of Solanaceae Scion and Stock Seedlings; Taichung District Agricultural Research and Extension Station, COA: Taichung, Taiwan, 2020; Volume 147, pp. 1–13. [Google Scholar]
- Belforte, G.; Raparelli, T.; Eula, G.; Sirolli, S. An Innovative Automatic Tomato Grafting Machine Prototype. J. Eng. Sci. Technol. 2022, 17, 2272–2286. [Google Scholar]
- Bausher, M.G.; Road, S.R.; Pierce, F. Graft angle and its relationship to tomato plant survival. HortScience 2013, 48, 34–36. [Google Scholar] [CrossRef]
- Pardo-Alonso, J.-L.; Carreño-Ortega, Á.; Martínez-Gaitán, C.-C.; Callejón-Ferre, Á.-J. Combined influence of cutting angle and diameter differences between seedlings on the grafting success of tomato using the splicing technique. Agronomy 2018, 9, 5. [Google Scholar] [CrossRef]
- Johnson, S.J.; Miles, C.A. Effect of healing chamber design on the survival of grafted eggplant, tomato, and watermelon. Horttechnology 2011, 21, 752–758. [Google Scholar] [CrossRef]
- Buajaila, F.A.; Devi, P.; Miles, C.A. Effect of environment on survival of eggplant, pepper, and tomato in a small-scale healing chamber. HortTechnology 2018, 28, 668–675. [Google Scholar] [CrossRef]
- Bliss, C.I. The transformation of percentages for use in the analysis of variance. Ohio J. Sci. 1938, 38, 9–12. [Google Scholar]
- Chang, Y.C. Effect of acclimatization environment condition on grafted seedlings growth of ‘Asian No. 6′ tomato. J. Chinese Soc. Hort. Sci. 2004, 50, 405–420. [Google Scholar]
- Kim, S.H.; Pham, T.D.; Kim, I.S. Effect of grafting position, water content in substrate on the survival rate and quality of grafted tomato seedlings. J. Agric. Life Environ. Sci. 2016, 27, 13. [Google Scholar]
- Johnson, S.; Kreider, P.; Miles, C. Vegetable Grafting: Eggplants and tomatoes. 2013. Available online: http://pubs.cahnrs.wsu.edu/publications/wp-content/uploads/sites/2/publications/fs052e.pdf (accessed on 19 February 2020).
- Chen, S.F.; Chang, C.Y.; Tien, Y.S. Benefit Analysis of Semiautomatic Grafting Machines Applied for Cherry Tomato Seedling Nursery Farm; Taichung District Agricultural Research and Extension Station, COA: Taichung, Taiwan, 2016; Volume 131, pp. 45–55. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Country | Model | Type | Operator | 1 h Grafted Seedlings |
|---|---|---|---|---|
| Japan | Robo-GRF | Semiautomatic | 1 | 400 |
| Robo-GRF AUTO | Automatic | 1 | 800 | |
| The Netherlands | ISO Graft 1100 | Semiautomatic | 2 | 1000 |
| ISO Graft 1200 | Semiautomatic | 1 | 1050 | |
| Italy | GR300 | Semiautomatic | 1 | 300 |
| Spain | EMP-300 | Semiautomatic | 1 | 390 |
| Korea | GR600C-S | Semiautomatic | 2 | 800 |
| Taiwan | The soft-clip fruit-bearing vegetable seedling grafting robotic system | Semiautomatic | 1 | 395 |
| Grafting auxiliary machinery | Auxiliary | 1 | 300 | |
| Conveyor type grafting Auxiliary machinery | Auxiliary | 4 | 1058 |
| Clip Type | Gripper Type | The Seedlings Clamping Survival Rate (%) | ||
|---|---|---|---|---|
| Eggplant Stock | Tomato Scion | |||
| Four claws | RG2 | 100 A1a2 | 98.08 Aa | |
| MHL2 | 98.08 Aa | 100 Aa | ||
| Eight claws | RG2 | 60.38 Bb | 85.58 Ab | |
| MHL2 | 100 Aa | 99.04 Aa | ||
| Significance (p ≤ 0.05) | ||||
| Clip type (C) | *** | * | ||
| Gripper type (G) | *** | *** | ||
| C × G | *** | * | ||
| Knife Type | Seedlings | The Seedlings Cutting Situation (%) | ||
|---|---|---|---|---|
| Success | Half | Fail | ||
| Short knife | Eggplant stock | 80.45 c | 13.46 a | 5.77 a |
| Tomato scion | 89.10 bc | 6.09 b | 4.81 a | |
| Long knife | Eggplant stock | 97.76 a | 0.96 c | 1.28 b |
| Tomato scion | 94.55 ab | 0.96 c | 4.17 ab | |
| Seedlings | Average Operating Time | |
|---|---|---|
| Single (s) | A Seedling (s) | |
| Eggplant stock | 17.56 ± 0.98 | 4.39 ± 0.25 |
| Tomato scion | 16.66 ± 0.36 | 4.17 ± 0.09 |
| Total | 34.22 ± 1.26 | 8.56 ± 0.32 |
| Short Knife | Long Knife | |
|---|---|---|
| Processing time of scion and rootstock (machine) | 14 min 34 s a | 15 min 05 s a |
| Time to graft a plate of grafted seedlings (machine + human) | 38 min 19 s a | 32 min 10 s b |
| Survival Rate of Grafted Seedlings (%) | Short Knife n = 312 | Long Knife n = 312 |
| 83.33 a | 84.94 a |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, C.-Y.; Hung, Y.-C.; Chen, W.-L.; Huang, Y.-I. Mechanism Optimization of the Clamping and Cutting Arrangement Device for Solanaceae Scion and Stock Seedlings. Appl. Sci. 2023, 13, 1548. https://doi.org/10.3390/app13031548
Chang C-Y, Hung Y-C, Chen W-L, Huang Y-I. Mechanism Optimization of the Clamping and Cutting Arrangement Device for Solanaceae Scion and Stock Seedlings. Applied Sciences. 2023; 13(3):1548. https://doi.org/10.3390/app13031548
Chicago/Turabian StyleChang, Chin-Yuan, Yu-Chen Hung, Wei-Ling Chen, and Yu-I Huang. 2023. "Mechanism Optimization of the Clamping and Cutting Arrangement Device for Solanaceae Scion and Stock Seedlings" Applied Sciences 13, no. 3: 1548. https://doi.org/10.3390/app13031548
APA StyleChang, C.-Y., Hung, Y.-C., Chen, W.-L., & Huang, Y.-I. (2023). Mechanism Optimization of the Clamping and Cutting Arrangement Device for Solanaceae Scion and Stock Seedlings. Applied Sciences, 13(3), 1548. https://doi.org/10.3390/app13031548