1. Introduction
In 2012, Google Inc. originally proposed the concept of a knowledge graph in Google’s Chrome browser search engine to provide users with better search experiences [
1,
2]. As structured semantic knowledge networks, knowledge graphs are gaining ever-increasing attention from industry, business, and academia, which offer relevant support for various scenarios, including intelligent search, technical support, and decision-making systems [
3]. In addition, semantic web knowledge bases have been created and used, such as YAGO [
4], FREEBASE [
5], and DBpedia [
6].
The recycling and reuse of EoL EV batteries have emerged as prominent approaches in recent years. The remanufacturing of EoL EV batteries has also gained recognition [
7]. Human–robot collaborative disassembly and robotic disassembly of EoL EV batteries are more efficient and safer than traditional manual disassembly. The involvement of robots in disassembly operations can reduce time and save costs [
8,
9]. Human–robot collaborative disassembly has become a frontier by combining the advantages of robots and human operators [
10].
An assembly information model based on a knowledge graph can facilitate the sharing of assembly process documentation information and increase the rate of information interaction during the development phase of the assembly process [
11]. The advantage of EV battery knowledge graphs lies in the ability to display the first level, or even the second and third levels, of surrounding nodes intuitively on a graph. These surrounding nodes are connected to the starting node through relationships. EV battery knowledge graphs can provide detailed structural information to assist operators in understanding the layout and composition of batteries. In addition, planning the disassembly sequence using knowledge graphs can facilitate the robotic disassembly of EV batteries.
The structure of this paper is as follows.
Section 2 outlines the current status of battery disassembly and the main problems in disassembly and recycling.
Section 3 describes the construction process and results of using a knowledge graph for EV batteries.
Section 4 reports a case study of the disassembly sequence planning of EV batteries using the constructed knowledge graph.
Section 5 concludes the paper.
2. Related Works
2.1. Processing Technical Levels of End-of-Life EV Batteries
Some scholars introduced the battery disassembly and recycling processes in terms of process improvements and technical levels. Pang Haifeng et al. [
12] introduced the situation of lead–acid battery disassembly. The article pointed out that the disassembly and recycling technology level of lead–acid batteries is low, with high energy consumption and low metal recovery rates. Techniques referring to cleanliness, refinement, intelligence, and digitalization need to be improved. Disassembly equipment for the process of crushing and sorting EoL EV batteries was structured by Kang Fei et al. [
13]. It improved the efficiency and digitalization of battery disassembly. Sonja Rosenberg et al. [
14] explored how different disassembly steps affect EV battery disassembly time. The cost of a disassembly plant was also estimated. Due to the varying design architectures of EV batteries on the market, the condition and safety of these batteries during recycling remain uncertain.
The market is facing three major problems in EV battery disassembly and recycling [
15]. Firstly, manufacturers produce batteries with various models and parameters. Secondly, in complicated disassembly tasks, the disassembly sequence becomes confusing, leading to low efficiency. Finally, manual disassembly has potential health and safety risks. Criteria were established for the EoL EV batteries and various options were highlighted for handling these batteries [
16]. The concept of a second life for EV batteries was introduced and several key technologies related to EV batteries were identified to accelerate the large-scale industrialization of second-life batteries. Artificial intelligence and Big Data technologies showed promise in second-life batteries.
2.2. Robotic Disassembly of EV Batteries
Researchers proposed innovative equipment and automation methods for the complex processes of battery disassembly. Ren Wei et al. [
17] introduced a robotic disassembly and motion planning system for EV batteries. Experiments were conducted on a robot simulation platform with and without obstacles. The experimental results demonstrated that the system was capable of independently planning and completing a task in dynamic environment. The utilization of telerobotic technology to explore a semi-robotic disassembly approach was proposed by Jamie Hathaway et al. [
18]. These researchers assessed the success rate and completion time of telerobotic technology in tasks such as disassembling bolts, grasping, and removing cover plates. The results showed a significant reduction in the overall disassembly time. However, the effect of the different levels of expertise of operators was not considered.
A disassembly planning system was constructed by defining disassembly primitives and introducing neural predictions. The intelligent disassembly of EV batteries was employed by deploying robots [
19]. The utilization of industrial robots for battery dismantling was explored [
8]. The disassembly process was analyzed, and the operation was divided into clamping and cutting. Robotic disassembly of EV batteries improved security and saved time compared to manual disassembly. An information-driven robotic disassembly architecture was proposed by Hendrik Poschmann et al. [
20]. This system included an information marketplace, robot cognition processor, system perception unit, disassembly execution unit, and human–machine interface. The system could incorporate information from the product’s entire lifecycle to ascertain the extent of disassembly.
2.3. Disassembly Sequence Planning and Knowledge Graph for the Disassembly of EV Batteries
Scholars created plans for disassembling returned parts that considered environmental factors and treatment methods. An automated optimization method was developed for planning disassembly sequences [
21]. Components were classified in detail while separating them at the lowest level of disassembly to ensure the disposal of non-toxic, toxic, and safe components. The management of parts after EoL treatment was proposed to reduce the environmental impact of the whole process [
22]. A disassembly sequence was created by using the stability graph cut-set approach and setting the minimum number of direction changes as the fitness function. By considering the direction changes through the fitness function, the stability graph cut-set method was utilized to generate the optimal disassembly sequence. A scoring system was designed to process the waste by decomposing the components containing biohazardous toxic materials to the lowest level [
23]. An environmental risk reduction model was investigated which included various parameters to tackle medical electronic waste. Artificial intelligence, knowledge engineering, deep learning, and mathematical algorithms were employed to analyze the disassembly sequence planning of EoL products with varying levels of scrap or disassembly requirements.
Artificial intelligence and machine learning were used to optimize the battery disassembly process. The approaches of employing artificial intelligence and machine learning to assist the disassembly of EV batteries were investigated by Kai Meng et al. [
24]. A machine learning and sensor-based automatic disassembly platform for EoL batteries was demonstrated [
25]. This platform combined a computer vision system and a thermal imager to enable real-time control of the cutting action and to enhance safety and quality control throughout the disassembly process. Yang Hu et al. [
26] proposed a knowledge recommendation system. This system employed a human–robot collaborative disassembly knowledge graph to assist human workers in disassembly operations and improve disassembly efficiency. The application of knowledge graphs was demonstrated. A review article discussed graph-based disassembly sequence planning [
27]. Blocking Graph (with some variations), AND/OR Graph, Liaison Graph, Connector-based Graph methods, and other graph-based methods such as Contact State Graph were outlined.
3. Knowledge Acquisition and Semantic Modelling of EV Batteries
Knowledge graphs can be divided into general knowledge graphs and domain knowledge graphs. A general knowledge graph provides support services for horizontal needs. It emphasizes horizontal coverage and encompasses a wide range of entities from various domains. The relationships between these domains form a multi-dimensional knowledge graph. Domain knowledge graphs provide services for vertical requirements and emphasize deep coverage [
28]. Knowledge graph construction relies on both data and ontology models. The ontology model serves as the backbone, defining the conceptual structure. Data acts as a support, providing necessary information. The relationship between ontology, data, and the knowledge graph can be expressed using the following formula:
The formula shows that the knowledge graph is a combination of ontology and data. The knowledge graph is composed of a scale-forming triplet that contains entities and relationships between entities. The triplet can be represented using the following formula:
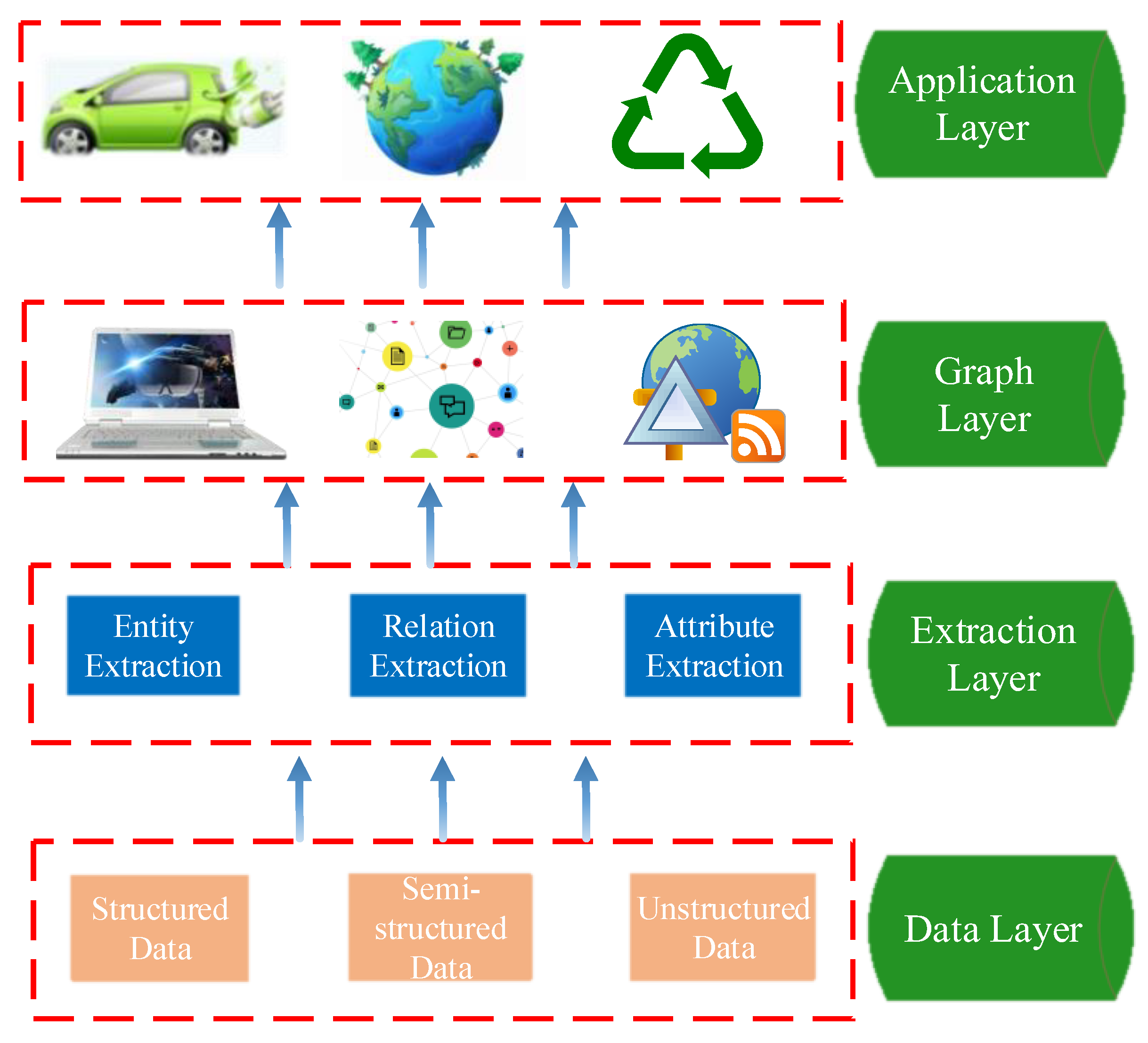
The construction process of the EV battery knowledge graphs in this paper is shown in
Figure 1. Firstly, the basic data about EV batteries should be cleaned and preprocessed, and the ontology model needs to be built. The next step is to perform entity extraction and relationship extraction on the processed data. Then, the data are entered into the construction of the graph layer. Finally, the constructed knowledge graph can be applied recommendation systems and sequence planning. A case study was carried out for the robotic disassembly sequence planning of EV batteries using knowledge graph.
3.1. Semantic Modelling of EV Battery Knowledge
In this paper, based on the structural information of EV batteries, the OWL ontology language is used to construct a structured knowledge description model [
29,
30]. The structure model describes the basic structure of EV batteries. It takes the overall structure as the first level category, which is divided into six sub-ontologies: lithium battery system, cooling system, connection method, chemical material, electrical components, and sensors, as shown in the following equation:
The lithium battery system sub-ontology consists of five sub-categories. It can be expressed using the following formula:
The cooling system sub-ontology is composed of three sub-categories. This sub-ontology can be expressed using the following equation:
The chemical material sub-ontology consists of three sub-categories, which can be explained using the following formula:
The connection method sub-ontology is made up of three sub-categories. It can be expressed using the following equation:
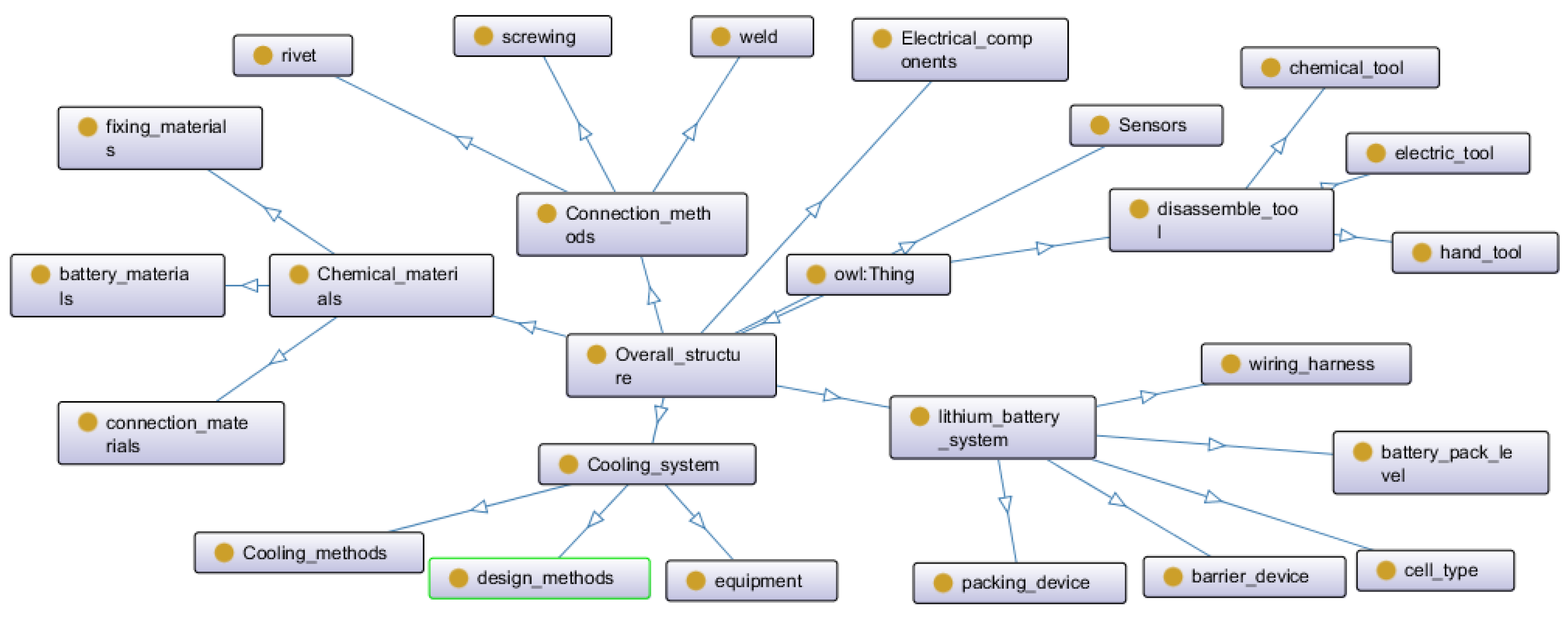
The ontology editing software Protégé 5.5.0 can be utilized to describe and model the semantic model of EV battery knowledge. The specific ontology description model of EV battery knowledge is shown in
Figure 2.
3.2. Knowledge Acquisition of EV Batteries
The data sources in this paper are academic research papers and reports on EV batteries, EV manufacturers, and EV battery suppliers [
31]. The data types of battery construction documents include unstructured data, semi-structured data, and structured data. After converting structured data into the JSON format, the data are stored in a CSV file. It is necessary to clean semi-structured data by removing stop words, handling missing values, and removing duplicate words before converting them to a CSV file. The unstructured data require pre-processing, segmentation, followed by entity extraction. For attribute extraction, a portion of the extracted entity serves as attribute data for the node. Knowledge extraction techniques can be utilized to obtain useful information from complex data types. Relationship extraction is the extraction of the relationships between entities from the text. The main constructs of an EV battery are the metal case, battery packs, and wires.
Table 1 lists the results of entity extraction, while entities exist as nodes in the knowledge graph.
The relationship extraction between entities extracts from text data. The entities are connected by various relationships in the knowledge graph which constitute a mesh knowledge system of EV batteries.
Table 2 lists some of the results of relationship extraction.
3.3. Knowledge Graph Construction of EV Battery
Knowledge extraction and semantic modelling were conducted. The obtained data were stored in CSV format files for batch data processing. After comparing some graph databases, Neo4j was chosen to store the obtained triplet data due to its ability to achieve professional-level databases of graph data storage and concise language. Neo4j is a Java-based open-source NoSQL graph database. Its architecture prioritizes swift management, storage, and traversal of nodes as well as relationships. In Neo4j, nodes correspond to entity data, and relationships correspond to relationship data in the triplet. The language of Neo4j is Cypher [
32]. It is a declarative graph database query language. Neo Technology developed Cypher specifically for Neo4j.
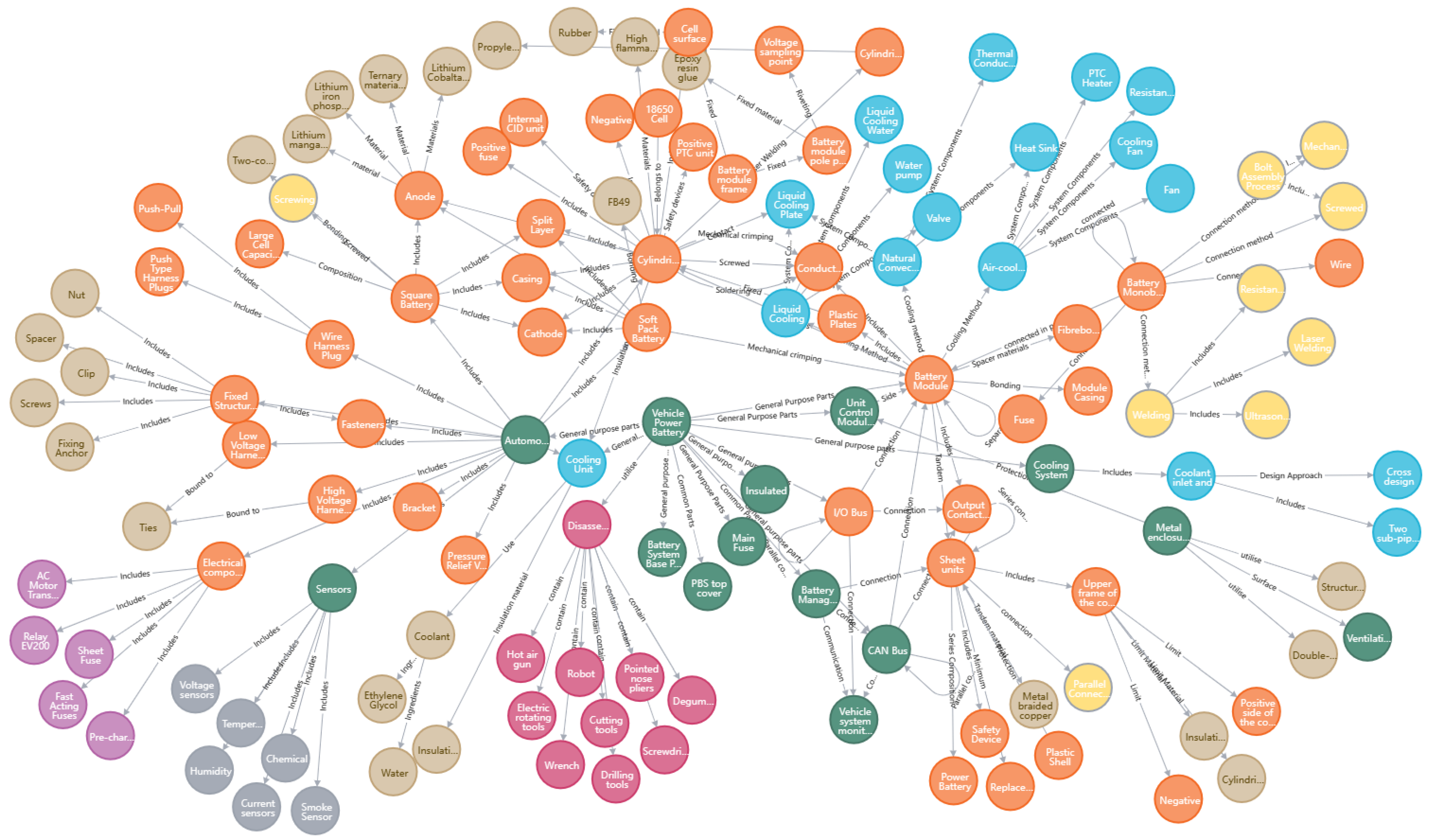
The CSV files were placed into the import folder of the current graph database in advance. The triplet data were loaded into the graph database Neo4j by commands such as LOAD CSV and MERGE in the Cypher language. Finally, the visualized knowledge graph was formed as shown in
Figure 3.
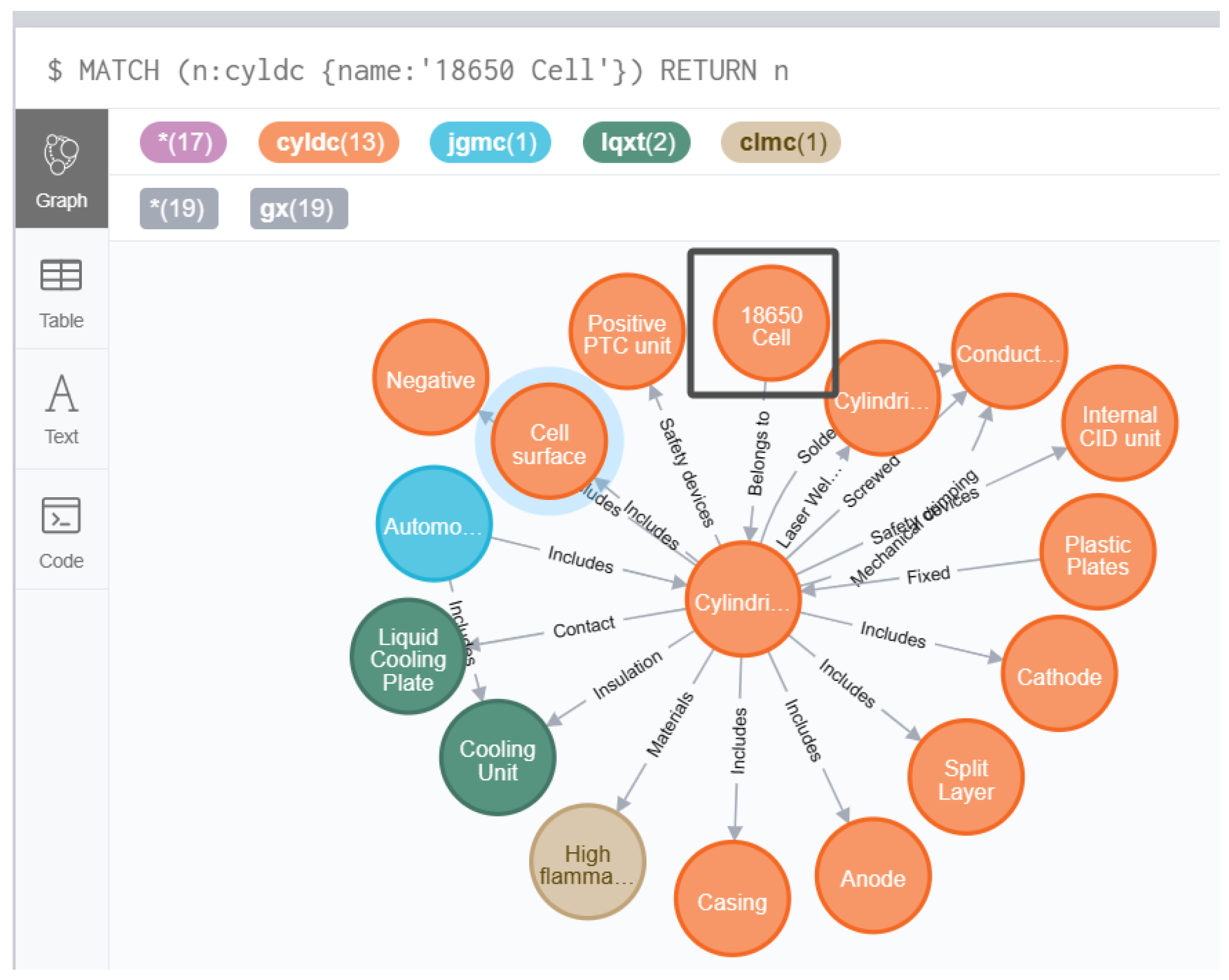
Neo4j has a convenient query language. Users can look up the target entity and its relationship exactly in the database. The query for node “18650Cell” is shown in
Figure 4. The nodes that are related to this node are displayed. The developed knowledge graph has the potential to address the challenge of knowledge gaps among disassembly personnel during the manufacturing process and assist human operators to understand the structure of the object to be disassembled and the relationships between different parts, thereby improving the efficiency of the entire production process [
33].
Ontology is analogous to the skeletal structure of the human body, providing the foundation of the knowledge graph and guiding the direction of its development. The graph expands outwards from the center with several nodes, such as ‘Vehicle Power Battery’ in the dark green node in
Figure 3. The central node is connected to its related secondary nodes, such as one of the “Cooling System” nodes connected to the “Vehicle Power Battery” node, and the “Cooling System” node can be connected to new nodes such as “Coolant inlet”, and so on, for other nodes at all levels. The ontology structure in
Figure 2 is centered around the “Overall Structure”, and the associated “Cooling System” also has three directions of extension. The knowledge graph illustrated in
Figure 3 is architecturally in sync with the ontology structure portrayed in
Figure 2. Due to the varying ontological structures employed, knowledge graphs are formed with distinct presentation patterns. However, as long as identical data are applied, these two different knowledge graphs can be considered to contain the same content, albeit having contrasting structures. The presentation of the knowledge graph is not limited to a specific structure. Structural changes can be made to the graph under different application scenarios. As shown in
Figure 5, this graph is structurally inconsistent with the graph in
Figure 3.
4. A Case Study of Knowledge Graph Used for Robotic Disassembly of an EV Battery
Knowledge graphs have been widely used in decision support, recommender systems, finance, healthcare, etc. [
34,
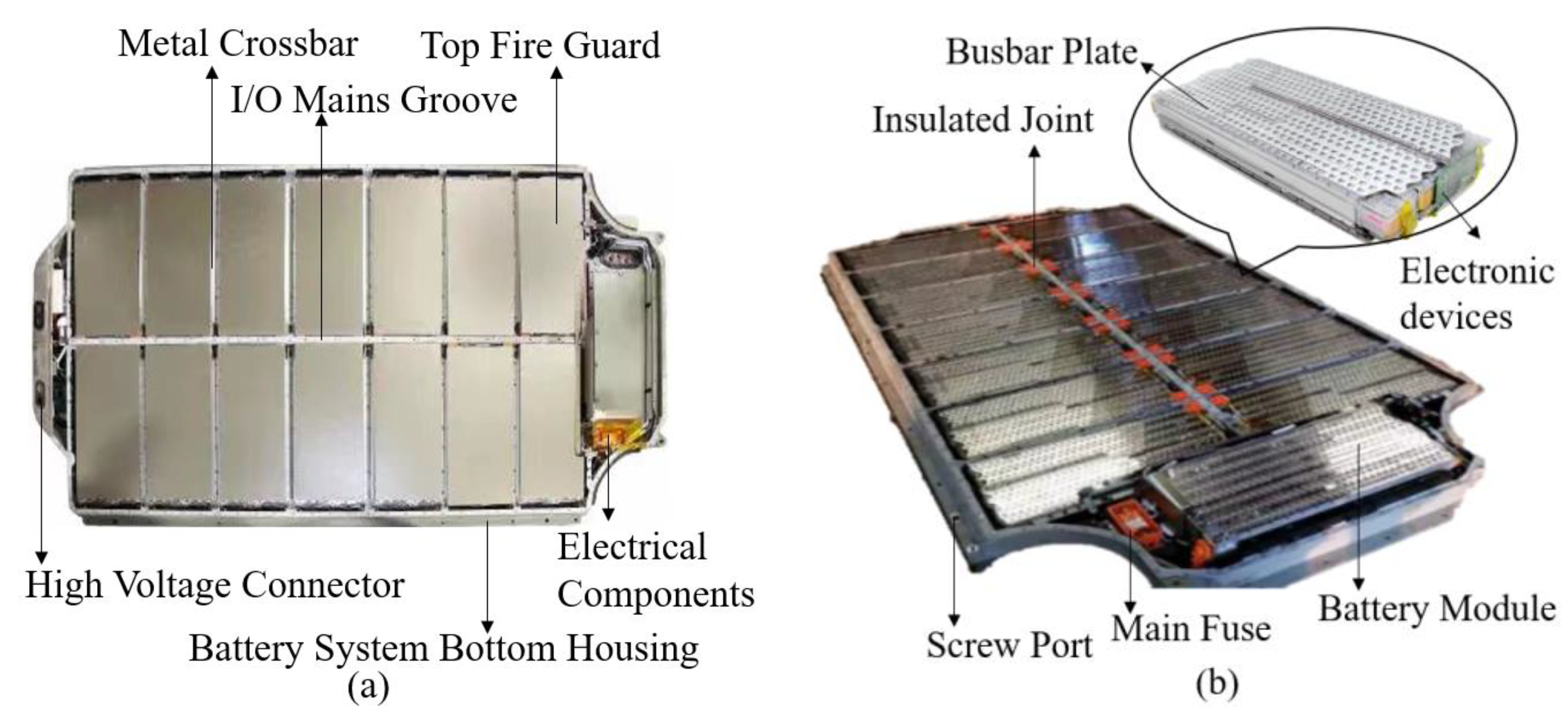
35]. The constructed EV battery knowledge graph can be applied to plan battery disassembly routes. Using the battery knowledge graph, operators can obtain the relationship and connection between various components. It assists operators in determining a reasonable disassembly sequence. The photo of a battery pack from Tesla is shown in
Figure 6 to explore the knowledge graph application in disassembly planning. The economic and environmental impacts were considered in the disassembly sequence planning in this section. References were drawn from videos and literature on the disassembly of EoL batteries. The structural information obtained in the previous section and the knowledge graph was combined.
The following assumptions are made to specify disassembly sequence planning. It is assumed that the parts utilized for disassembly during remanufacturing were in good condition. Before the disassembly process, the batteries were discharged to prevent high-voltage injuries. All processing procedures conformed to the required standards to prevent environmental harm. Parts can be reused, remanufactured, or recycled through physical or chemical treatment, resulting in the majority of materials being reused.
The whole battery system can be divided into five major parts: isolation system, cooling system, wiring harness system, electrical system, and battery system, as listed in
Table 3.
Based on the above internal classification of the EV batteries, components, and the constraint relationships between components, the knowledge graph can be used to determine the nodes corresponding to the component to be disassembled in the next step, until the node corresponding to the last part to be disassembled is determined. Different disassembly routes can be generated for a task, which can be optimized.
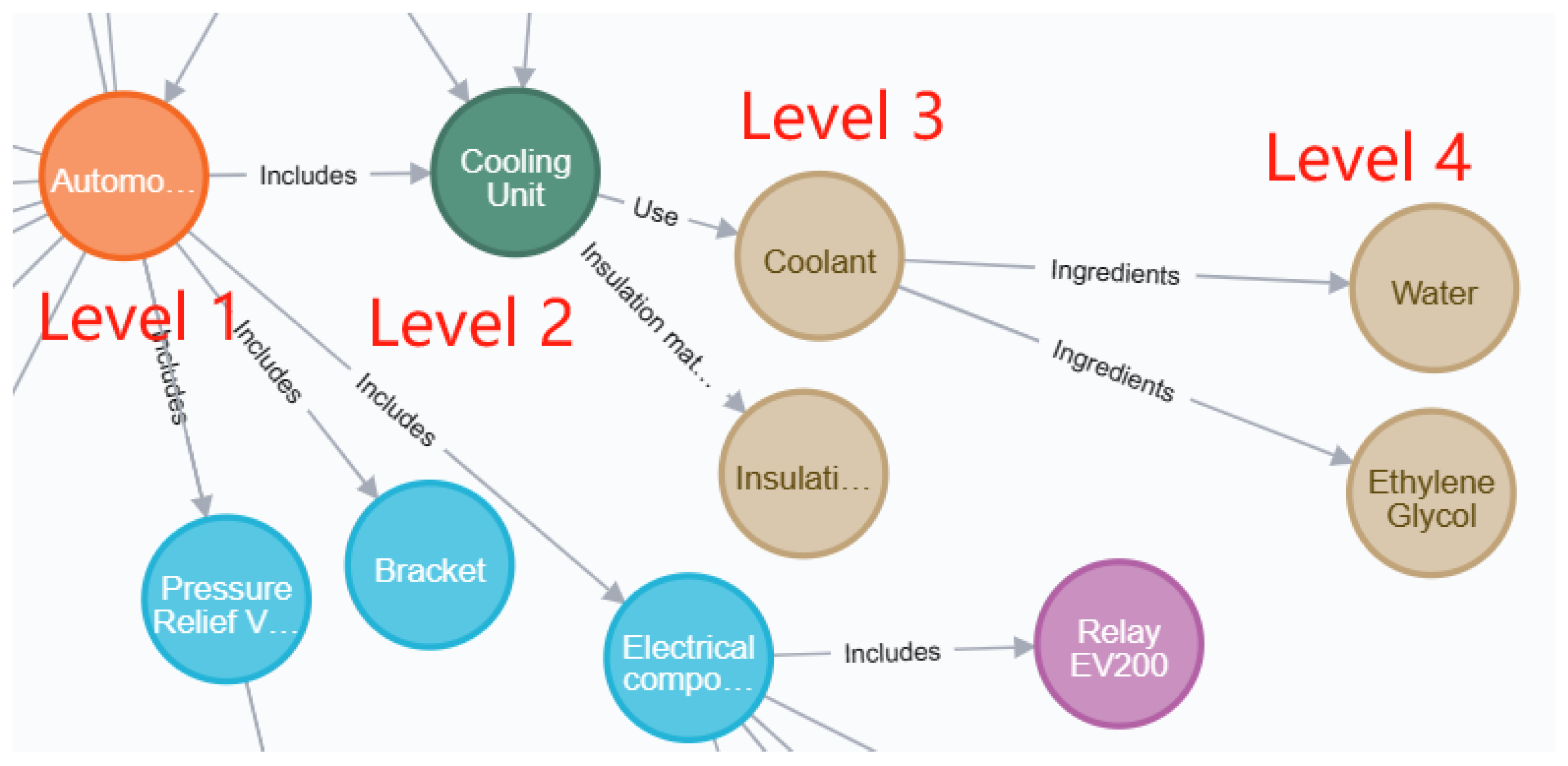
Figure 7 explains the level of nodes as an example of an EV battery knowledge graph.
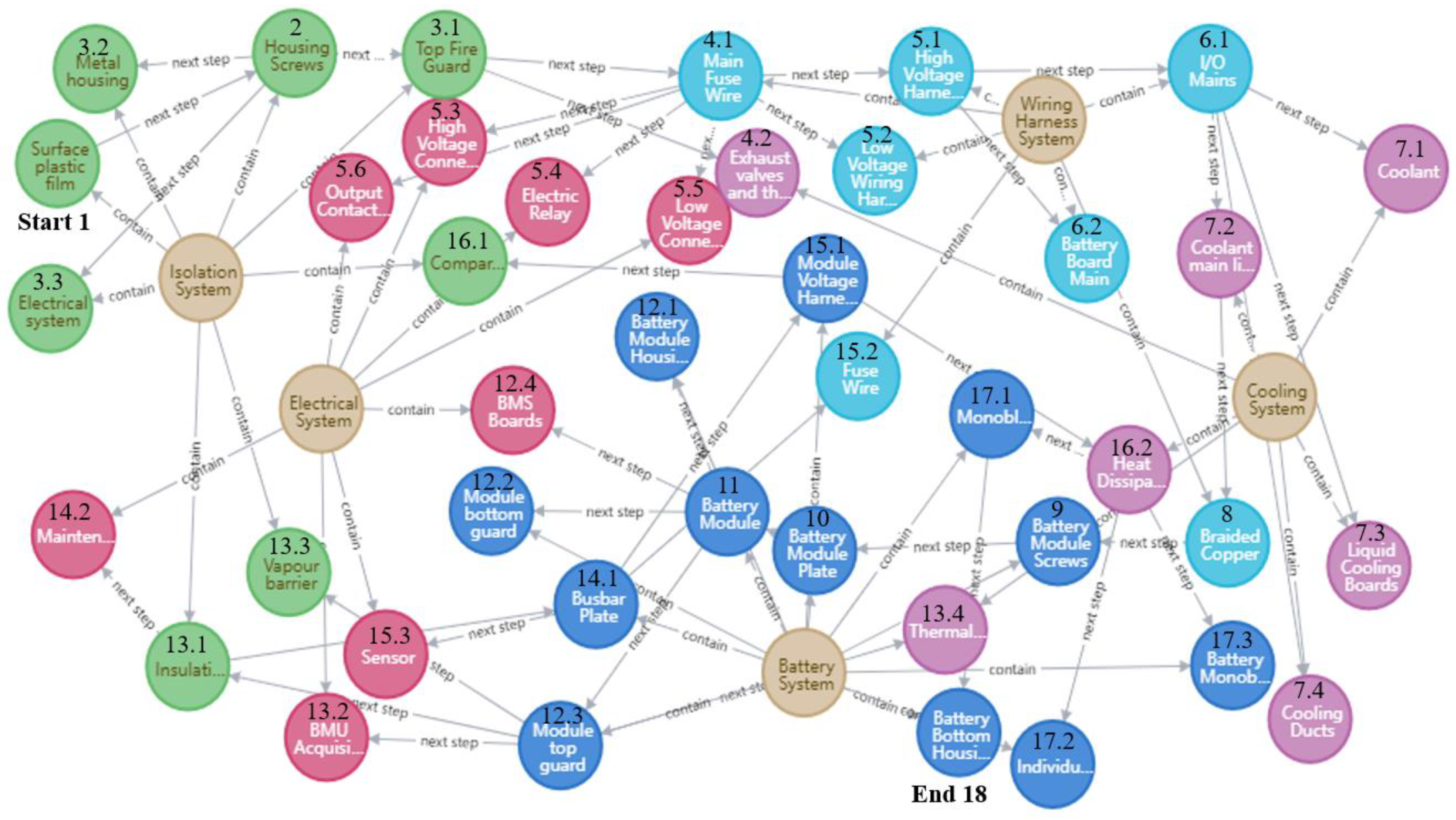
The disassembly sequence planning of the knowledge graph for EV batteries refers to the step-by-step disassembly and the planning based on internal structure and component characteristics to obtain an efficient, safe, and sustainable battery disassembly process. The disassembly route is shown in
Figure 8. Different models of batteries have different structures, so the orders can be changed and some steps can be deleted or added to improve the operation. The route starts at the node “surface plastic film” and ends at the node “battery bottom housing”.
According to the planned disassembly sequence, the disassembly operations can be described in
Table 4:
5. Conclusions
To increase the efficiency and intelligence level of planning robotic disassembly sequences, this paper proposes the method of knowledge graph construction for EV batteries. Firstly, the structure information of the relevant battery was obtained, and the extracted data were combined with the semantic model of ontology structure. Then, the method of knowledge graph construction of EV batteries was introduced. The knowledge graph is a structural data network for representing various concepts, entities, attributes, and relationships of the battery structure in the battery disassembly process. Finally, a case study was carried out to demonstrate the constructed knowledge graph for planning the disassembly route of an EV battery.
The EV battery knowledge graph visualizes the relationships between the parts or components to be disassembled. The resources covered by the knowledge graph can provide operators with quick and accurate queries for relevant information for disassembly knowledge acquisition and decision-making. The proposed knowledge graph could be used to improve the disassembly efficiency of EoL EV batteries.
The disassembly sequence planning using the EV battery knowledge graph includes the following objectives:
Enhancing the battery recycling process: Disassembly sequence planning through the knowledge graph can improve the efficiency of battery recycling.
Optimizing battery reuse: The EV battery knowledge graph can be applied for the identification of components and materials within batteries that can be further reused to improve battery reuse rates and battery lifespan.
Safe handling of battery waste: The effective control and disposal of battery waste can be achieved by planning the disassembly sequence to mitigate risks to the environment and human health by employing appropriate safety measures.
Delivering training and guidance: Disassembly sequencing planning can be employed for training and guidance, helping operators to comprehend the inherent intricacies and qualities of batteries and to learn correct operational procedures and disassembly techniques.
Author Contributions
Conceptualization, J.W. and J.H.; methodology, J.W. and J.H.; software, J.W.; validation, J.W., J.H. and R.L.; formal analysis, J.H.; investigation, J.W.; data curation, J.W.; writing—original draft preparation, J.W.; writing—review and editing, J.H. and R.L.; visualization, J.W.; supervision, J.H. and R.L.; project administration, J.H. and R.L.; funding acquisition, J.H. and R.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Department of Science and Technology of Hubei Province, Grant Number 2022BAA056, and the Fundamental Research Funds for the Central Universities of China, Grant No. WUT:2023IVA009.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Singhal, A. Introducing the knowledge graphs: Things, not strings. Off. Google Blog 2012, 16, 1–10. [Google Scholar]
- Liu, Q.; Yang, L.; Hong, D.; Yao, L.; Zhiguang, Q. A review of knowledge graph construction techniques. Comput. Res. Dev. 2016, 53, 582–600. [Google Scholar]
- Zou, X. A Survey on Application of Knowledge Graph. J. Phys. Conf. Ser. 2020, 1487, 012016. [Google Scholar] [CrossRef]
- Bizer, C.; Lehmann, J.; Kobilarov, G.; Auer, S.; Becker, C.; Cyganiak, R.; Hellmann, S. DBpedia-a crystallization point for the web of data. Web Semant. Sci. Serv. Agents World Wide Web 2009, 7, 154–165. [Google Scholar] [CrossRef]
- Suchanek, F.M.; Kasneci, G.; Weikum, G. Yago: A large ontology from wikipedia and wordnet. Web Semant. Sci. Serv. Agents World Wide Web 2008, 6, 203–217. [Google Scholar] [CrossRef]
- Bollacker, K.; Cook, R.; Tufts, P. Freebase: A shared database of structured general human knowledge. In Proceedings of the Twenty-Second AAAI Conference on Artificial Intelligence, Vancouver, BC, Canada, 22–26 July 2007. [Google Scholar]
- Ramoni, M.O.; Zhang, H.C. End-of-life (EoL) issues and options for electric vehicle batteries. Clean Technol. Environ. Policy 2013, 15, 881–891. [Google Scholar] [CrossRef]
- Kay, I.; Farhad, S.; Mahajan, A.; Esmaeeli, R.; Hashemi, S.R. Robotic Disassembly of Electric Vehicles’ Battery Modules for Recycling. Energies 2022, 15, 4856. [Google Scholar] [CrossRef]
- Choux, M.; Bigorra, E.M.; Tyapin, I. Task Planner for Robotic Disassembly of Electric Vehicle Battery Pack. Metals 2021, 11, 387. [Google Scholar] [CrossRef]
- Sebastian, H.; Dimitrios, C. Human–robot collaboration in industrial environments: A literature review on non-destructive disassembly. Robot. Comput.-Integr. Manuf. 2022, 73, 102208. [Google Scholar]
- Chen, Z.; Bao, J.; Zheng, X.; Liu, T. Assembly Information Model Based on Knowledge Graph. J. Shanghai Jiaotong Univ. 2020, 25, 578–588. [Google Scholar] [CrossRef]
- Pang, H.; Ding, W.; Li, H.; Zhang, D. Current status of research on disassembly process and equipment for lead-acid batteries. Battery 2022, 52, 592–596. [Google Scholar]
- Kang, F.; Sun, Z.; Lu, X. Research on disassembly equipment and process of decommissioned lithium battery oriented to sorting. Nonferrous Met. (Miner. Process. Sect.) 2023, 2, 124–132. [Google Scholar]
- Rosenberg, S.; Huster, S.; Baazouz, S.; Glöser-Chahoud, S.; Al Assadi, A.; Schultmann, F. Field Study and Multimethod Analysis of an EV Battery System Disassembly. Energies 2022, 15, 5324. [Google Scholar] [CrossRef]
- Xiao, J.; Jiang, C.; Wang, B. A Review on Dynamic Recycling of Electric Vehicle Battery: Disassembly and Echelon Utilization. Batteries 2023, 9, 57. [Google Scholar] [CrossRef]
- Zhu, J.; Mathews, I.; Ren, D.; Li, W.; Cogswell, D.; Xing, B.; Sedlatschek, T.; Nithin, S.; Kantareddy, R.; Yi, M.; et al. End-of-life or second-life options for retired electric vehicle batteries. Cell Rep. Phys. Sci. 2021, 2, 100537. [Google Scholar] [CrossRef]
- Ren, W.; Wang, Z.; Yang, H.; Zhang, Y.; Chen, M. NeuroSymbolic Task and Motion Planner for Disassembly Electric Vehicle Batteries. J. Comput. Res. Dev. 2021, 58, 2604–2617. [Google Scholar]
- Hathaway, J.; Hathaway, J.; Shaarawy, A.; Akdeniz, C.; Aflakian, A.; Aflakian, A.; Stolkin, R.; Stolkin, R.; Rastegarpanah, A. Towards reuse and recycling of lithium-ion batteries: Tele-robotics for disassembly of electric vehicle batteries. Front. Robot. AI 2023, 10, 1179296. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Zhang, Y.; Wang, Z.; Zhang, S.; Li, H.; Chen, M. A novel knowledge-driven flexible human–robot hybrid disassembly line and its key technologies for electric vehicle batteries. J. Manuf. Syst. 2023, 68, 338–353. [Google Scholar] [CrossRef]
- Poschmann, H.; Brüggemann, H.; Goldmann, D. Fostering End-of-Life Utilization by Information-driven Robotic Disassembly. Procedia CIRP 2021, 98, 282–287. [Google Scholar] [CrossRef]
- Bahubalendruni, M.V.A.R.; Varupala, V.P. Disassembly Sequence Planning for Safe Disposal of End-of-Life Waste Electric and Electronic Equipment. Natl. Acad. Sci. Lett. 2020, 44, 243–247. [Google Scholar] [CrossRef]
- Gunji, B.M.; Pabba, S.K.; Rajaram, I.R.S.; Sorakayala, P.S.; Dubey, A.; Deepak, B.B.V.L.; Biswal, B.B.; Bahubalendruni, M.V.A.R. Optimal disassembly sequence generation and disposal of parts using stability graph cut-set method for End of Life product. Sādhanā 2021, 46, 1–15. [Google Scholar] [CrossRef]
- Gulivindala, A.K.; Bahubalendruni, M.V.A.R.; Madhu, B.P.; Eswaran, M. Mechanical disassembly sequence planning for end-of-life products to maximize recyclability. Sādhanā 2023, 48, 109. [Google Scholar] [CrossRef]
- Meng, K.; Xu, G.; Peng, X.; Youcef-Toumi, K.; Li, J. Intelligent disassembly of electric-vehicle batteries: A forward-looking overview. Resour. Conserv. Recycl. 2022, 182, 106207. [Google Scholar] [CrossRef]
- Lu, Y.; Maftouni, M.; Yang, T.; Zheng, P.; Young, D.; Kong, Z.J.; Li, Z. A novel disassembly process of end-of-life lithium-ion batteries enhanced by online sensing and machine learning techniques. J. Intell. Manuf. 2023, 34, 2463–2475. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Ding, Y.; Xu, F.; Liu, J.; Xu, W.; Feng, H. Knowledge Recommendation System for Human-Robot Collaborative Disassembly Using Knowledge Graph. In Proceedings of the ASME 2021 16th International Manufacturing Science and Engineering Conference, Virtual, 21–25 June 2021. [Google Scholar]
- SoGhandi, É.; Masehian, E. Review and taxonomies of assembly and disassembly path planning problems and approaches. Comput.-Aided Des. 2015, 67–68, 58–86. [Google Scholar]
- Al-Aswadi, F.N.; Chan, H.Y.; Gan, K.H. Automatic ontology construction from text: A review from shallow to deep learning trend. Artif. Intell. Rev. 2020, 53, 3901–3928. [Google Scholar] [CrossRef]
- Wang, H.; Qi, G.; Chen, H. Knowledge Graph Methods, Practices and Applications, 1st ed.; Electronic Industry Press: Beijing, China, 2019; pp. 48–58. [Google Scholar]
- Ding, Y. Research on human-machine collaborative disassembly knowledge recommendation based on knowledge graph. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2020. [Google Scholar]
- Li, W. Battery structure and charging method of Tesla electric car. Automot. Repair Maint. 2016, 1, 102–103. [Google Scholar]
- Green, A.; Guagliardo, P.; Libkin, L.; Lindaaker, T.; Marsault, V.; Plantikow, S.; Schuster, M.; Selmer, P.; Voigt, H. Updating Graph Databases with Cypher. Proc. VLDB Endow. 2019, 12, 2242–2253. [Google Scholar] [CrossRef]
- Buchgeher, G.; Gabauer, D.; Martinez-Gil, J.; Ehrlinger, L. Knowledge Graphs in Manufacturing and Production: A Systematic Literature Review. IEEE Access 2021, 9, 55537–55554. [Google Scholar] [CrossRef]
- Tao, J.; Li, X.; Zheng, P.; Peng, T.; Xu, K.; Bao, J. Current status and frontiers of applied research on knowledge graph in manufacturing. Comput. Integr. Manuf. Syst. 2022, 28, 3720–3736. [Google Scholar]
- Chen, Y.; Ge, X.; Yang, S.; Hu, L.; Li, J.; Zhang, J. A Survey on Multimodal Knowledge Graphs: Construction, Completion and Applications. Mathematics 2023, 11, 1815. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}