
Joint Channel and Power Assignment for Underwater Cognitive Acoustic Networks on Marine Mammal-Friendly

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
3. System Model
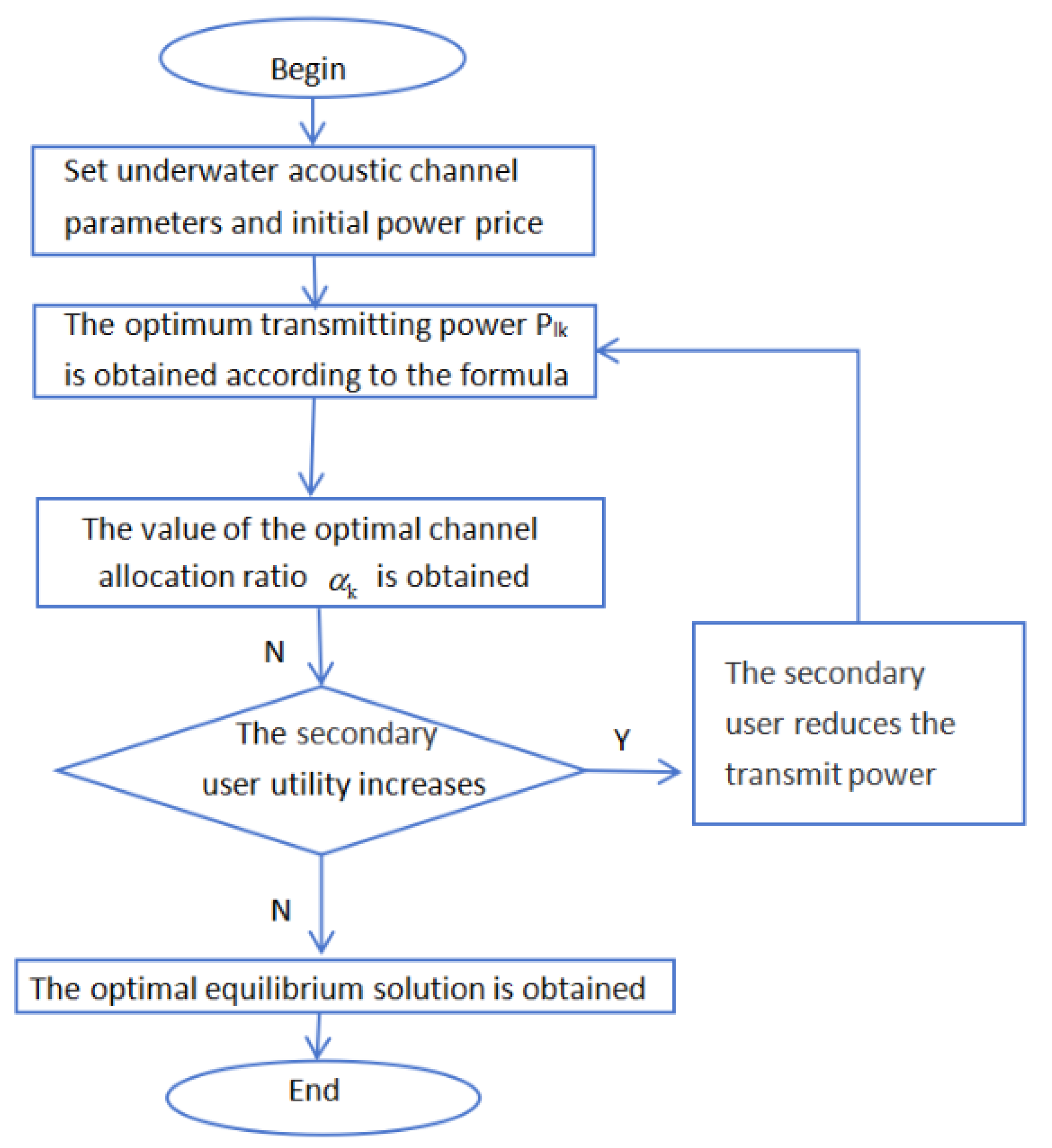
3.1. Mammal-Friendly Communication Mechanism
- Set underwater acoustic channel parameters.
- The optimal power Plk of the secondary user is obtained.
- The channel allocation ratio ak is obtained.
- Determine whether the benefit of the secondary user continues to increase. If so, the secondary user reduces its power according to the step , returns to Step 2, and starts the algorithm process again until the utility function of the secondary user no longer increases.
- The optimal Nash equilibrium solution is obtained and the algorithm is terminated.
3.2. Joint Channel and Power Assignment
3.3. Existence Proof of Nash Equilibrium
- Pk is a non-empty, closed, finitely convex set of Euclidean space RN.
- U(Pk) is continuous on P, and quasi-concave on Pk.
4. Discussion
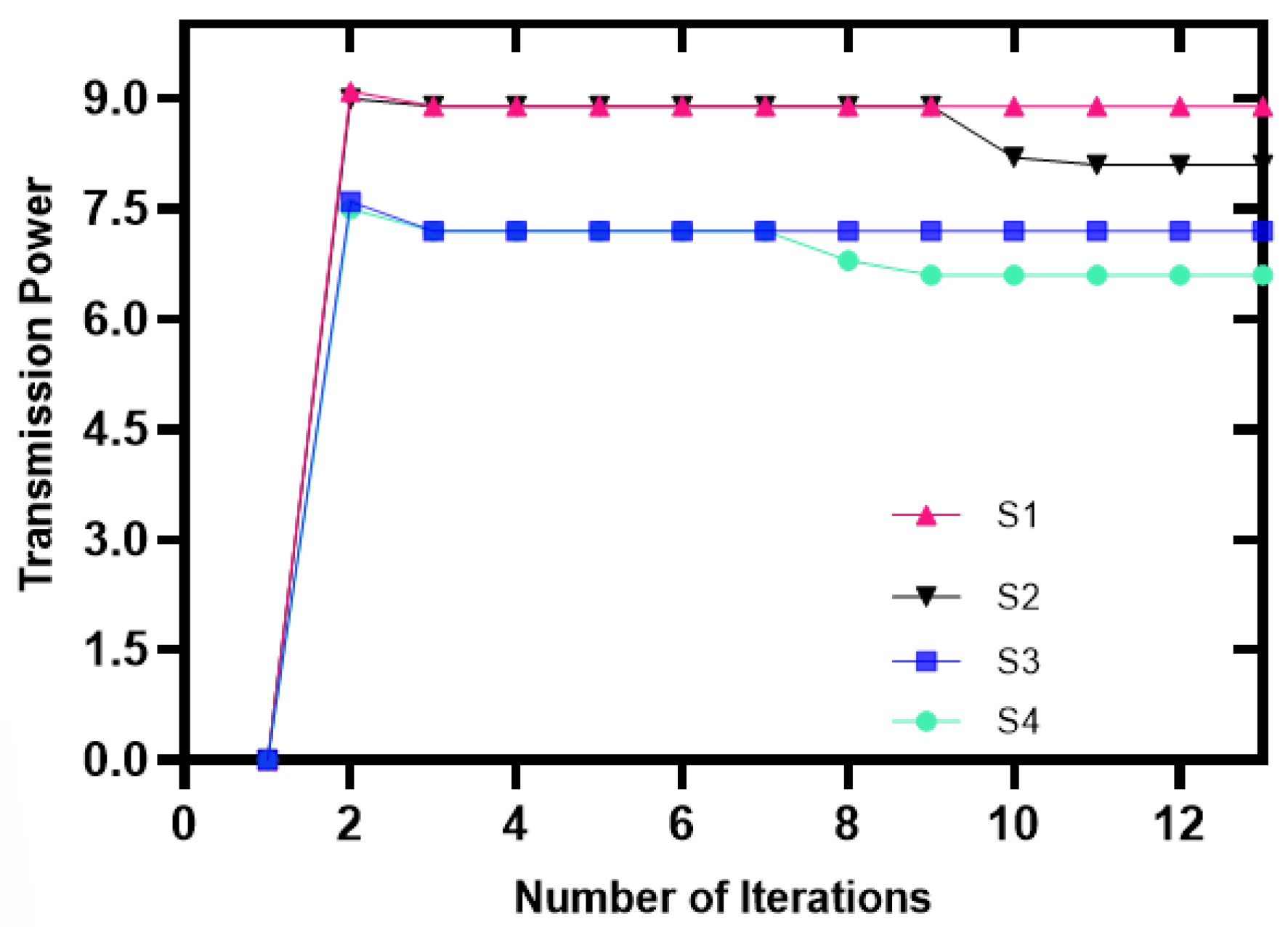
4.1. Node Transmitting Power
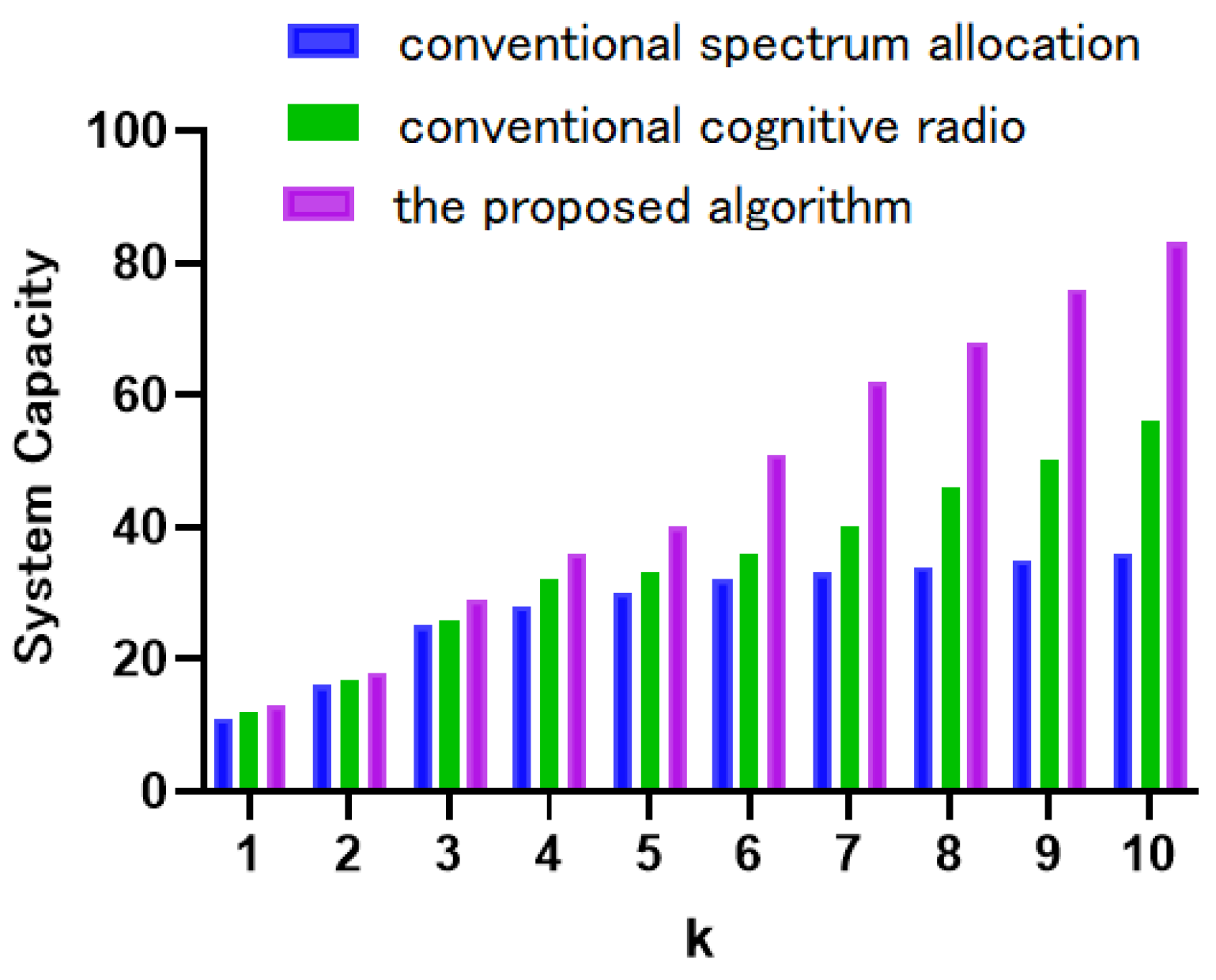
4.2. System Capacity
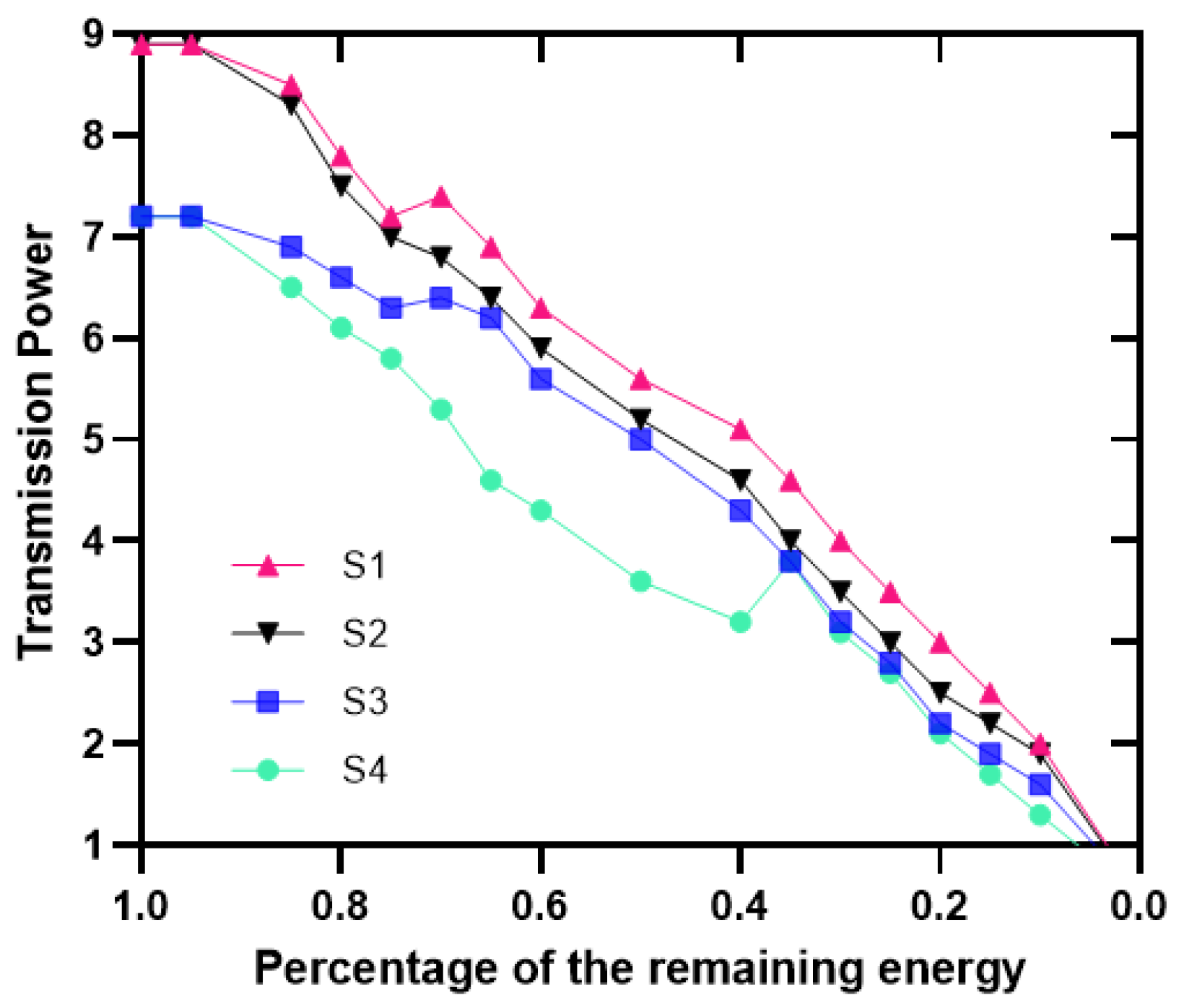
4.3. Node Residual Energy
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Zhang, S. An architecture for using autonomous underwater vehicles in wireless sensor networks for underwater pipeline monitoring. IEEE Trans. Ind. Informat. 2019, 15, 1329–1340. [Google Scholar] [CrossRef]
- Zheng, C.; Sun, D.; Cai, L.; Li, X. Mobile node localization in underwater wireless networks. IEEE Access 2018, 6, 17232–17244. [Google Scholar] [CrossRef]
- Yang, G.; Dai, L.; Wei, Z. Challenges, threats, security issues and new trends of underwater wireless sensor networks. Sensors 2018, 18, 3907. [Google Scholar] [CrossRef] [PubMed]
- Luo, Y.; Pu, L.; Zuba, M.; Peng, Z.; Cui, J.-H. Challenges and Opportunities of Underwater Cognitive Acoustic Networks. IEEE Trans. Emerg. Top. Comput. 2014, 2, 198–211. [Google Scholar] [CrossRef]
- Morozs, N.; Mitchell, P.D.; Diamant, R. Scalable adaptive networking for the Internet of Underwater Things. IEEE Internet Things J. 2020, 7, 10023–10037. [Google Scholar] [CrossRef]
- Han, G.; Zhou, Z.; Zhang, Y.; Martínez-García, M.; Peng, Y.; Xie, L. Sleep-scheduling-based hierarchical data collection algorithm for gliders in underwater acoustic sensor networks. IEEE Trans. Veh. Technol. 2021, 70, 9466–9479. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, Y.; Chen, J.; Zhao, B.; Gao, C.; Dong, J. A Prediction-Based Spectrum Allocation Algorithm for Highway Mobility Model in Cognitive Radio Networks. In Proceedings of the 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 11–13 December 2020; pp. 52–55. [Google Scholar] [CrossRef]
- Ikami, A.; Hayashi, T.; Amano, Y. Fair Spectrum Allocation for Dynamic Spectrum Sharing between Different Radio Systems. In Proceedings of the 2020 23rd International Symposium on Wireless Personal Multimedia Communications (WPMC), Okayama, Japan, 19–26 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, N.; Yang, D.; Jing, L. An Advanced Algorithm for Spectrum Allocation of Primary Users Based on Cournot Game. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Long, Y.; Li, Y.; Long, Y.; He, L.; Ju, H. Joint Spectrum Sensing, Bandwidth Allocation and Energy Consumption Optimization in Cognitive IoT. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), Norman, OK, USA, 27–30 September 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Wong, C.Y.; Cheng, R.S.; Lataief, K.B.; Murch, R.D. Multiuser OFDM with adaptive subcarrier, bit, and power allocation. IEEE J. Sel. Areas Commun. 1999, 17, 1747–1758. [Google Scholar] [CrossRef]
- Gharsalli, K.; Bouvet, P.-J.; Najeh, S.; Besbes, H.; Pors, T.L.; Gazzah, H. Non-cooperative Resource Allocation Game-Theoretic Approach in Underwater Acoustics. In Proceedings of the 2023 International Wireless Communications and Mobile Computing (IWCMC), Marrakesh, Morocco, 19–23 June 2023; pp. 632–637. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, A.; Fan, R.; Zhu, J. Soft Frequency Reuse for Underwater Acoustic Sensor Networks with Interference Mitigation and Adaptive Resources Allocation. In Proceedings of the Global Oceans 2020: Singapore—U.S. Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Pottier, A.; Tomasi, B. Online adaptive power allocation and channel state feedback strategies in underwater acoustic networks. In Proceedings of the OCEANS 2021: San Diego–Porto, San Diego, CA, USA, 20–23 September 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Yao, G.; Jin, Z.; Su, Y. An environment-friendly spectrum decision strategy for underwater wireless sensor networks. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 6370–6375. [Google Scholar] [CrossRef]
- Su, H.; Qian, Y.; Zhang, J. An Environmental Friendly Routing with Channel Allocation for Underwater WSNs. In Proceedings of the 2019 IEEE 11th International Conference on Communication Software and Networks (ICCSN), Chongqing, China, 12–15 June 2019; pp. 348–352. [Google Scholar] [CrossRef]
- Wang, S.; Wen, M.; Xia, M.; Wang, R.; Hao, Q.; Wu, Y.-C. Angle Aware User Cooperation for Secure Massive MIMO in Rician Fading Channel. IEEE J. Sel. Areas Commun. 2020, 38, 2182–2196. [Google Scholar] [CrossRef]
- Holt, M.M.; Noren, D.P.; Dunkin, R.C.; Williams, T.M. Vocal performance affects metabolic rate in dolphins: Implications for animals communicating in noisy environments. J. Exp. Biol. 2015, 218, 1647–1654. [Google Scholar] [CrossRef]
- Cheng, W.; Luo, Y.; Peng, Z.; Hastings, M.C. A framework of acoustic channel availability prediction for avoiding interfering marine mammals. In Proceedings of the 9th International Conference on Underwater Networks & Systems (WUWNET), Rome, Italy, 12–14 November 2014. [Google Scholar]
- Jepson, P.D.; Arbelo, M.; Deaville, R.; Patterson, I.A.P.; Castro, P.; Baker, J.R.; Degollada, E.; Ross, H.M.; Herráez, P.; Pocknell, A.M.; et al. Gas-bubble lesions in stranded cetaceans. Nature 2003, 425, 575–576. [Google Scholar] [CrossRef] [PubMed]
- Wilson, C.; Robinson, D.; Shotwell, S.K. Overcoming barriers to the use of satellite data in fisheries management. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 3302–3305. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, L.; Cao, C. Joint Channel and Power Assignment for Underwater Cognitive Acoustic Networks on Marine Mammal-Friendly. Appl. Sci. 2023, 13, 12950. https://doi.org/10.3390/app132312950
Xue L, Cao C. Joint Channel and Power Assignment for Underwater Cognitive Acoustic Networks on Marine Mammal-Friendly. Applied Sciences. 2023; 13(23):12950. https://doi.org/10.3390/app132312950
Chicago/Turabian StyleXue, Libin, and Chunjie Cao. 2023. "Joint Channel and Power Assignment for Underwater Cognitive Acoustic Networks on Marine Mammal-Friendly" Applied Sciences 13, no. 23: 12950. https://doi.org/10.3390/app132312950
APA StyleXue, L., & Cao, C. (2023). Joint Channel and Power Assignment for Underwater Cognitive Acoustic Networks on Marine Mammal-Friendly. Applied Sciences, 13(23), 12950. https://doi.org/10.3390/app132312950