
Permissible Scale Factors for Various Intensity Measures in Aftershock Ground Motion Scaling




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Ground Motions and Structures
3. Methodology
4. Statistical Results
4.1. Short-Period Region
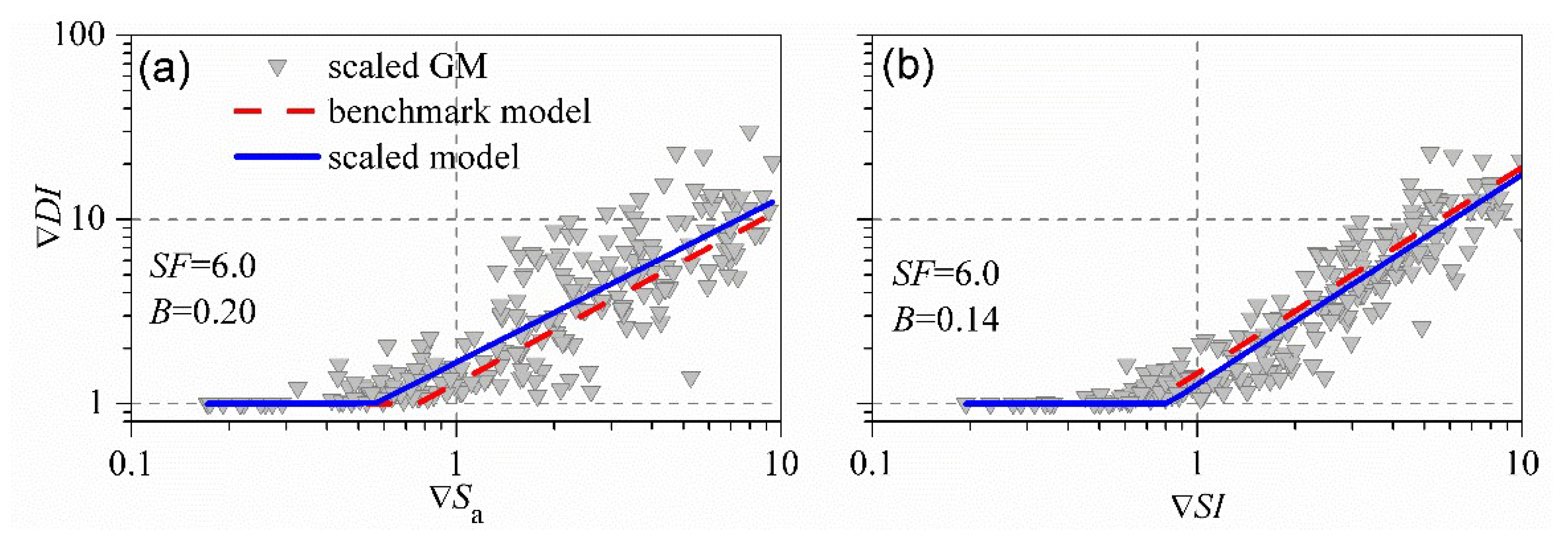
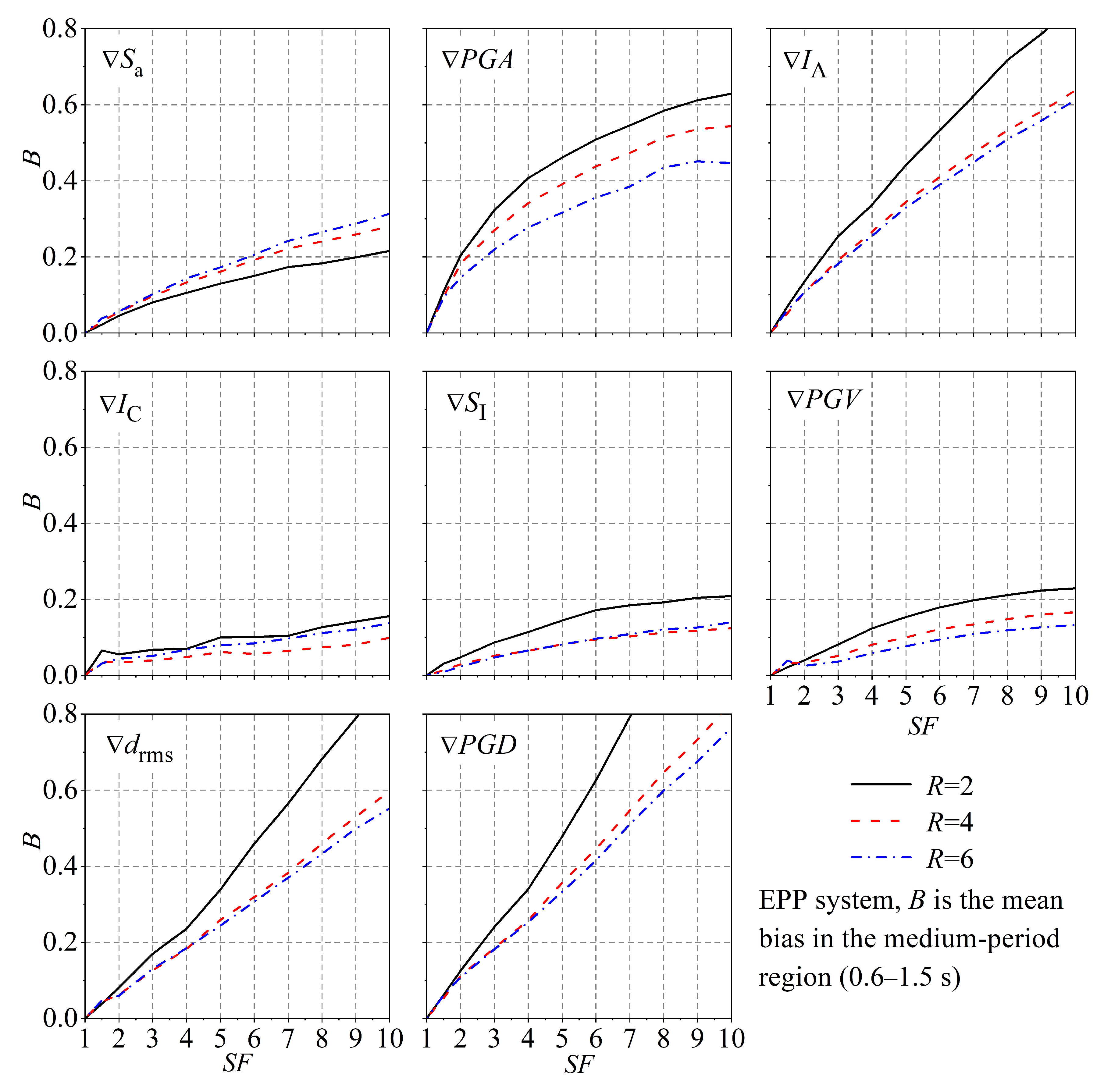
4.2. Medium-Period Region
4.3. Long-Period Region
4.4. Whole-Period Region
5. Conclusions
- (1)
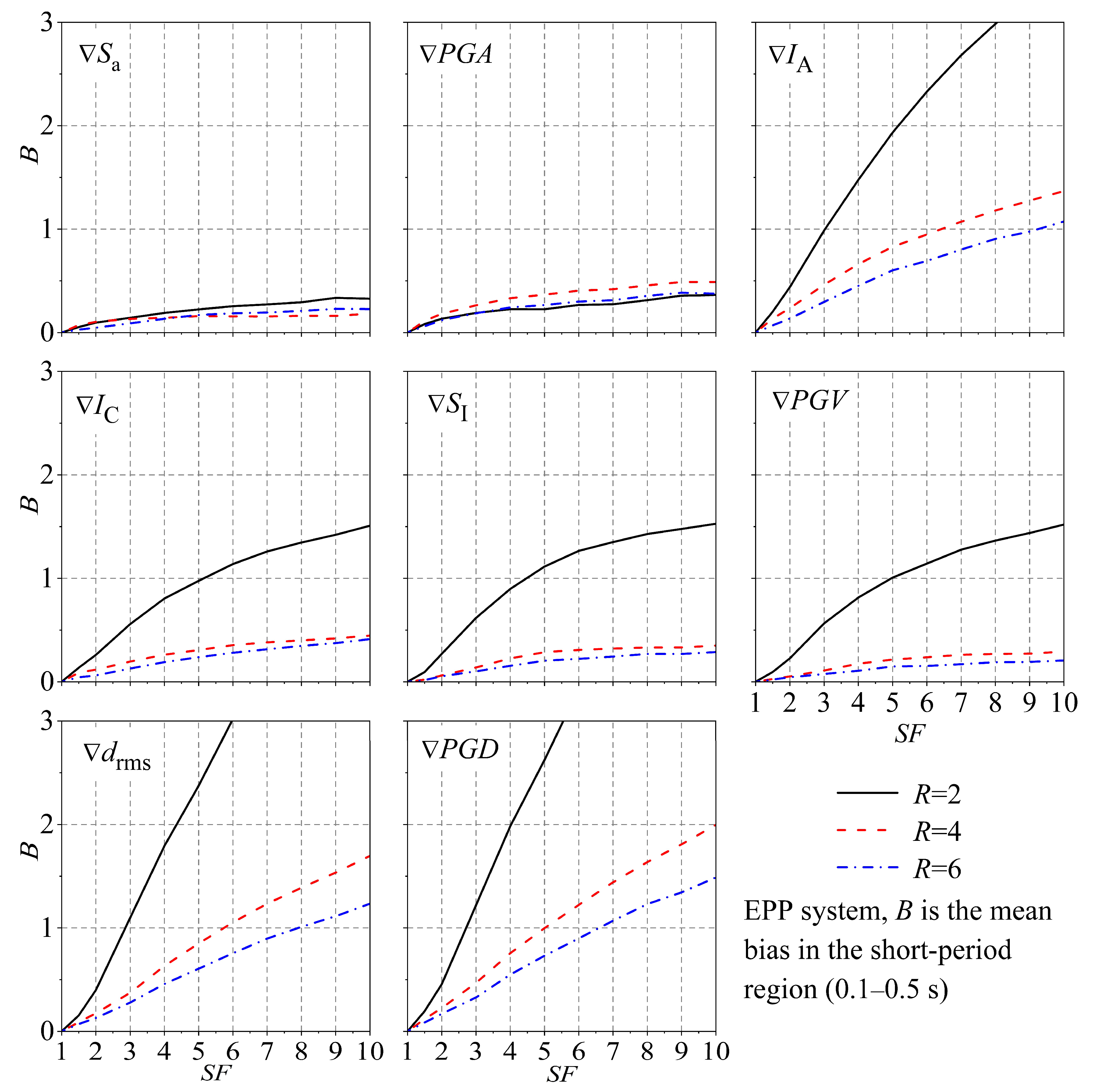
- For systems in the short-period region, using as the scale indicator would introduce the biases within 30% for a scale factor as large as 10.0, while the corresponding bias increases to 50% when is used as a scale indicator.
- (2)
- For systems in the medium-period region, the biases are generally within 20% even for a scale factor of 10.0, when and are used as the scaled indicators, and corresponding biases for and are generally within 30%. The superiority of as the scale indicator can be explained by two points: the first is that the dimension of IC is between acceleration and velocity, and the second is that the computation of IC incorporates the effects of duration.
- (3)
- In the long-period region, the biases resulting from the scaling of aftershock ground motion with parameters such as , , and are typically below 30% when the scale factor is less than 10.0. However, the bias associated with the parameter increases to 40%, which is still lower than the biases observed for displacement-related intensity measures (e.g., ).
- (4)
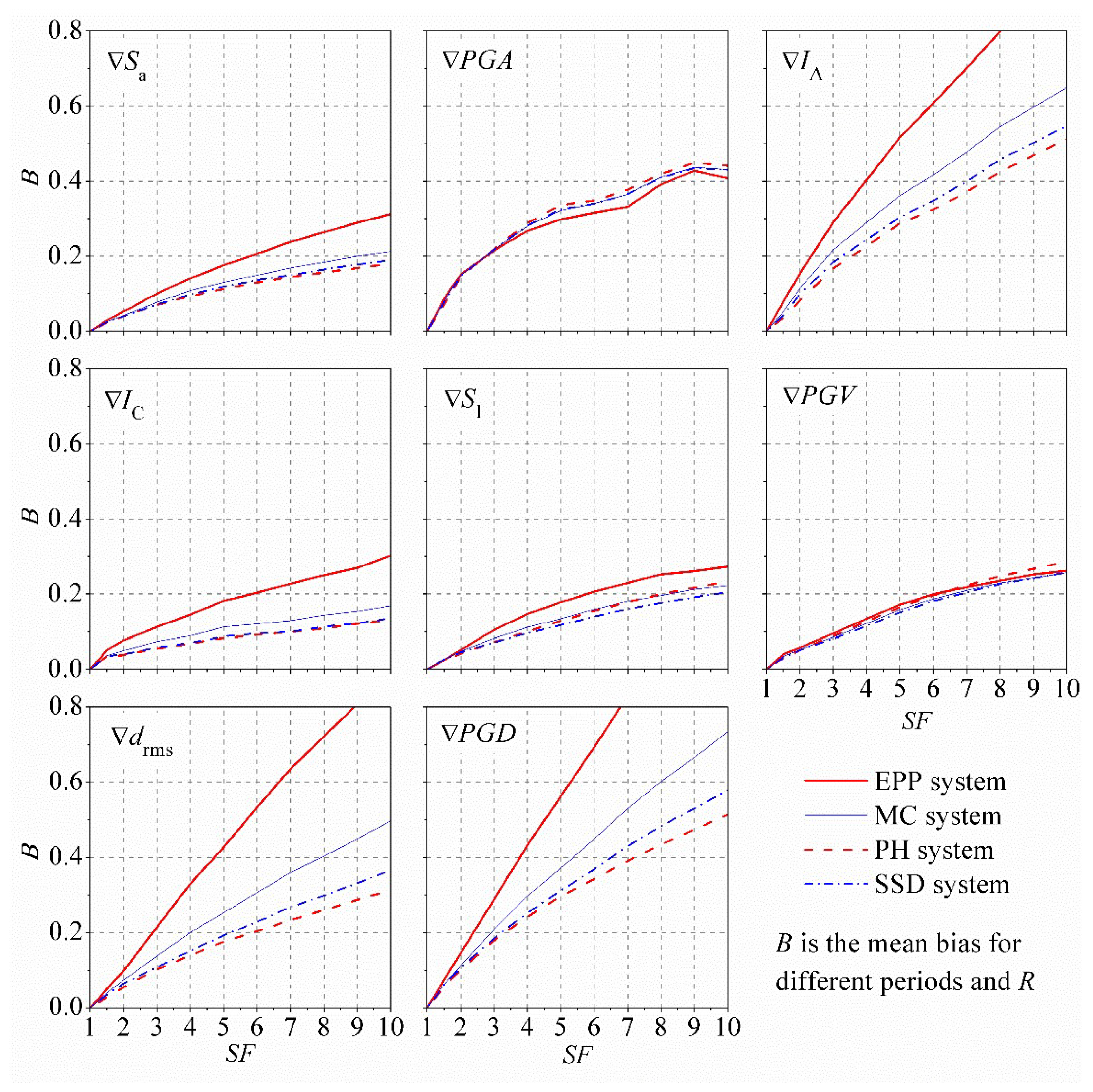
- After studying the mean bias in the whole-period region, it can be found that the performance of , , , and is superior to the other four scale indicators, and they can control the mean bias within 30% even for scale factors as large as 10.0. Aftershock ground motion scaling tends to introduce higher bias in the additional damage of EPP systems than degrading systems.
- (5)
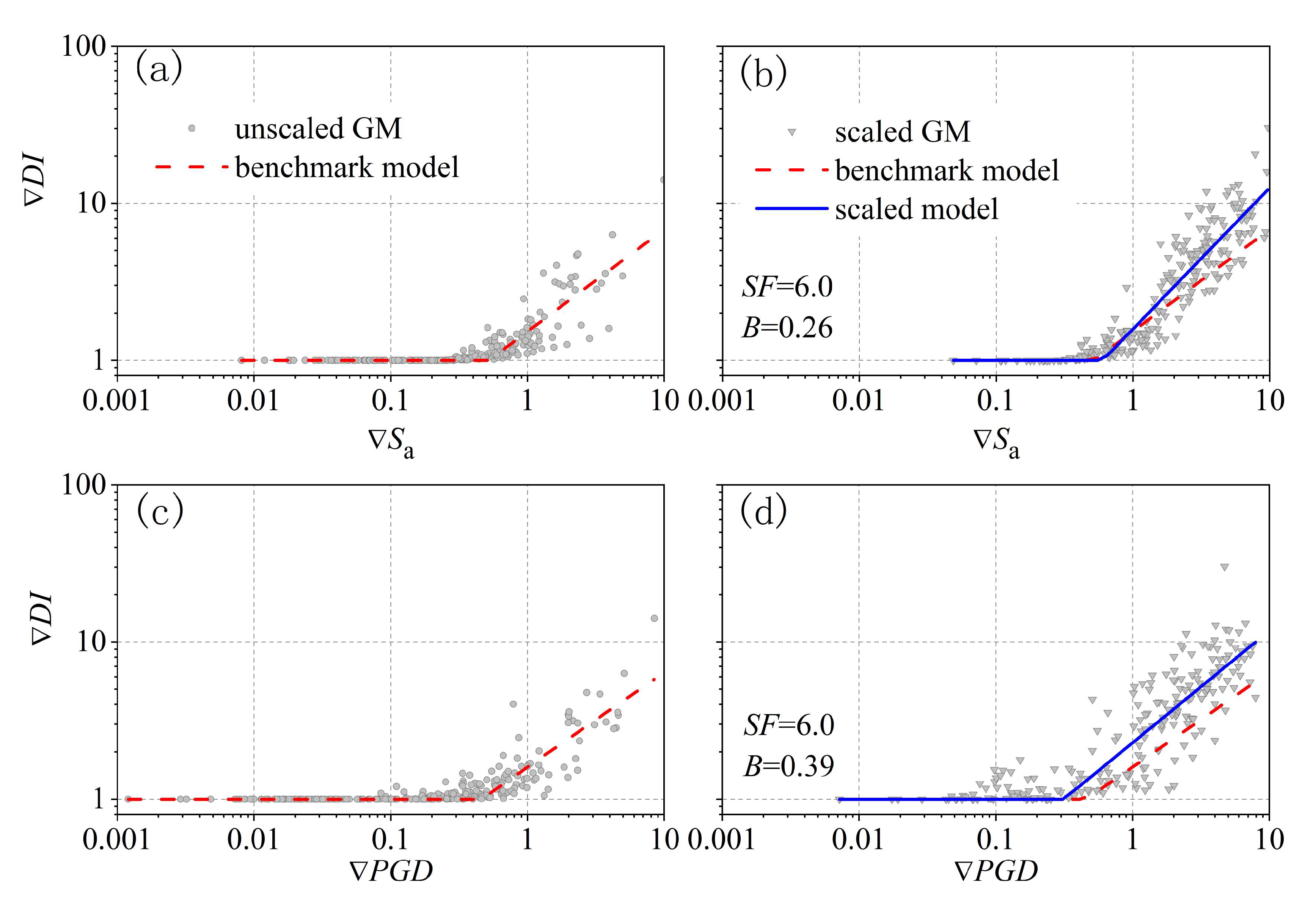
- Scaling aftershock ground motions up (i.e., SF > 1.0) using tends to overestimate the additional damage to structures.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ruiz-García, J. Mainshock-aftershock ground motion features and their influence in building’s seismic response. J. Earthq. Eng. 2012, 16, 719–737. [Google Scholar] [CrossRef]
- Moustafa, A.; Takewaki, I. Characterization of earthquake ground motion of multiple sequences. Earthq. Struct. 2012, 3, 629–647. [Google Scholar] [CrossRef]
- Yaghmaei-Sabegh, S. Time–frequency analysis of the 2012 double earthquakes records in north-west of iran. Bull. Earthq. Eng. 2014, 12, 585–606. [Google Scholar] [CrossRef]
- Yaghmaei-Sabegh, S.; Wang, H. Aftershock ground motion characteristics during the 2012 varzaghan–ahar doublet events, northwest of iran. Nat. Hazards 2022, 111, 2579–2599. [Google Scholar] [CrossRef]
- Hatzigeorgiou, G.D.; Beskos, D.E. Inelastic displacement ratios for SDOF structures subjected to repeated Earthquakes. Eng. Struct. 2009, 31, 2744–2755. [Google Scholar] [CrossRef]
- Hatzigeorgiou, G.D. Ductility demand spectra for multiple near- and far-fault earthquakes. Soil Dyn. Earthq. Eng. 2010, 30, 170–183. [Google Scholar] [CrossRef]
- Zhai, C.H.; Wen, W.P.; Chen, Z.; Li, S.; Xie, L.L. Damage spectra for the mainshock–aftershock sequence-type ground motions. Soil Dyn. Earthq. Eng. 2013, 45, 1–12. [Google Scholar] [CrossRef]
- Moustafa, A.; Takewaki, I. Response of nonlinear single-degree-of-freedom structures to random acceleration sequences. Eng. Struct. 2011, 33, 1251–1258. [Google Scholar] [CrossRef]
- Goda, K.; Taylor, C.A. Effects of aftershocks on peak ductility demand due to strong ground motion records from shallow crustal earthquakes. Earthq. Eng. Struct. Dyn. 2012, 41, 2311–2330. [Google Scholar] [CrossRef]
- Zhai, C.H.; Wen, W.P.; Li, S.; Chen, Z.; Chang, Z.; Xie, L.L. The damage investigation of inelastic SDOF structure under the mainshock-aftershock sequence-type ground motions. Soil Dyn. Earthq. Eng. 2014, 59, 30–41. [Google Scholar] [CrossRef]
- Zhai, C.; Wen, W.; Ji, D.; Li, S. The influences of aftershocks on the constant damage inelastic displacement ratio. Soil Dyn. Earthq. Eng. 2015, 79, 186–189. [Google Scholar] [CrossRef]
- Zhai, C.H.; Wen, W.P.; Li, S.; Xie, L.L. The ductility-based strength reduction factor for the mainshock-aftershock sequence-type ground motions. Bull. Earthq. Eng. 2015, 13, 2893–2914. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, J.; Sun, C. Damage-based strength reduction factor for nonlinear structures subjected to sequence-type ground motions. Soil Dyn. Earthq. Eng. 2017, 92, 298–311. [Google Scholar] [CrossRef]
- Pu, W.; Wu, M. Ductility demands and residual displacements of pinching hysteretic timber structures subjected to seismic sequences. Soil Dyn. Earthq. Eng. 2018, 114, 392–403. [Google Scholar] [CrossRef]
- Rinaldin, G.; Amadio, C. Effects of seismic sequences on masonry structures. Eng. Struct. 2018, 166, 227–239. [Google Scholar] [CrossRef]
- Wen, W.; Zhai, C.; Ji, D. Damage spectra of global crustal seismic sequences considering scaling issues of aftershock ground motions. Earthq. Eng. Struct. Dyn. 2018, 47, 2076–2093. [Google Scholar] [CrossRef]
- Wen, W.; Ji, D.; Zhai, C.; Li, X.; Sun, P. Damage spectra of the mainshock-aftershock ground motions at soft soil sites. Soil Dyn. Earthq. Eng. 2018, 115, 815–825. [Google Scholar] [CrossRef]
- Manafpour, A.R.; Kamrani, P. Performance capacity of damaged RC SDOF systems under multiple far-and near-field earthquakes. Soil Dyn. Earthq. Eng. 2019, 116, 164–173. [Google Scholar] [CrossRef]
- Hatzigeorgiou, G.D.; Liolios, A.A. Nonlinear behaviour of RC frames under repeated strong ground motions. Soil Dyn. Earthq. Eng. 2010, 30, 1010–1025. [Google Scholar] [CrossRef]
- Ruiz-García, J.; Negrete-Manriquez, J.C. Evaluation of drift demands in existing steel frames under as-recorded far-field and near-fault mainshock–aftershock seismic sequences. Eng. Struct. 2011, 33, 621–634. [Google Scholar] [CrossRef]
- Moustafa, A.; Takewaki, I. Modeling critical ground-motion sequences for inelastic structures. Adv. Struct. Eng. 2011, 13, 665–679. [Google Scholar] [CrossRef]
- Loulelis, D.; Hatzigeorgiou, G.D.; Beskos, D.E. Moment resisting steel frames under repeated earthquakes. Earthq. Struct. 2012, 3, 231–248. [Google Scholar] [CrossRef]
- Efraimiadou, S.; Hatzigeorgiou, G.D.; Beskos, D.E. Structural pounding between adjacent buildings subjected to strong ground motions. Part II: The effect of multiple earthquakes. Earthq. Eng. Struct. Dyn. 2013, 42, 1529–1545. [Google Scholar] [CrossRef]
- Faisal, A.; Majid, T.A.; Hatzigeorgiou, G.D. Investigation of story ductility demands of inelastic concrete frames subjected to repeated earthquakes. Soil Dyn. Earthq. Eng. 2013, 44, 42–53. [Google Scholar] [CrossRef]
- Goda, K.; Salami, M.R. Inelastic seismic demand estimation of wood-frame houses subjected to mainshock-aftershock sequences. Bull. Earthq. Eng. 2014, 12, 855–874. [Google Scholar] [CrossRef]
- Ruiz-García, J.; Marín, M.V.; Terán-Gilmore, A. Effect of seismic sequences in reinforced concrete frame buildings located in soft-soil sites. Soil Dyn. Earthq. Eng. 2014, 63, 56–68. [Google Scholar] [CrossRef]
- Shin, J.; Kim, J.; Lee, K. Seismic assessment of damaged piloti-type RC building subjected to successive earthquakes. Earthq. Eng. Struct. Dyn. 2014, 43, 1603–1619. [Google Scholar] [CrossRef]
- Goda, K. Record selection for aftershock incremental dynamic analysis. Earthq. Eng. Struct. Dyn. 2015, 44, 1157–1162. [Google Scholar] [CrossRef]
- Li, Y.; Song, R.; Van De Lindt, J.W. Collapse fragility of steel structures subjected to earthquake mainshock-aftershock sequences. J. Struct. Eng. 2014, 140, 04014095. [Google Scholar] [CrossRef]
- Raghunandan, M.; Liel, A.B.; Luco, N. Aftershock collapse vulnerability assessment of reinforced concrete frame structures. Earthq. Eng. Struct. Dyn. 2015, 44, 419–439. [Google Scholar] [CrossRef]
- Jeon, J.S.; DesRoches, R.; Lowes, L.N.; Brilakis, I. Framework of aftershock fragility assessment–case studies: Older California reinforced concrete building frames. Earthq. Eng. Struct. Dyn. 2015, 44, 2617–2636. [Google Scholar] [CrossRef]
- Ghosh, J.; Padgett, J.E.; Sánchez-Silva, M. Seismic damage accumulation in highway bridges in earthquake-prone regions. Earthq. Spectra 2015, 31, 115–135. [Google Scholar] [CrossRef]
- Jeon, J.S.; DesRoches, R.; Lee, D.H. Post-repair effect of column jackets on aftershock fragilities of damaged RC bridges subjected to successive earthquakes. Earthq. Eng. Struct. Dyn. 2016, 45, 1149–1168. [Google Scholar] [CrossRef]
- Hatzivassiliou, M.; Hatzigeorgiou, G.D. Seismic sequence effects on three-dimensional reinforced concrete buildings. Soil Dyn. Earthq. Eng. 2015, 72, 77–88. [Google Scholar] [CrossRef]
- Zhai, C.H.; Zheng, Z.; Li, S.; Xie, L.L. Seismic analyses of a RCC building under mainshock–aftershock seismic sequences. Soil Dyn. Earthq. Eng. 2015, 74, 46–55. [Google Scholar] [CrossRef]
- Ruiz-García, J.; Aguilar, J.D. Aftershock seismic assessment taking into account postmainshock residual drifts. Earthq. Eng. Struct. Dyn. 2015, 44, 1391–1407. [Google Scholar] [CrossRef]
- Hosseinpour, F.; Abdelnaby, A. Fragility curves for RC frames under multiple earthquakes. Soil Dyn. Earthq. Eng. 2017, 98, 222–234. [Google Scholar] [CrossRef]
- Jalayer, F.; Ebrahimian, H. Seismic risk assessment considering cumulative damage due to aftershocks. Earthq. Eng. Struct. Dyn. 2017, 46, 369–389. [Google Scholar] [CrossRef]
- Hosseinpour, F.; Abdelnaby, A.E. Effect of different aspects of multiple earthquakes on the nonlinear behavior of RC structures. Soil Dyn. Earthq. Eng. 2017, 92, 706–725. [Google Scholar] [CrossRef]
- Wang, G.; Wang, Y.; Lu, W.; Yan, P.; Zhou, W.; Chen, M. Damage demand assessment of mainshock-damaged concrete gravity dams subjected to aftershocks. Soil Dyn. Earthq. Eng. 2017, 98, 141–154. [Google Scholar] [CrossRef]
- Wen, W.; Zhai, C.; Ji, D.; Li, S.; Xie, L. Framework for the vulnerability assessment of structure under mainshock-aftershock sequences. Soil Dyn. Earthq. Eng. 2017, 101, 41–52. [Google Scholar] [CrossRef]
- Veismoradi, S.; Cheraghi, A.; Darvishan, E. Probabilistic mainshock-aftershock collapse risk assessment of buckling restrained braced frames. Soil Dyn. Earthq. Eng. 2018, 115, 205–216. [Google Scholar] [CrossRef]
- Furtado, A.; Rodrigues, H.; Varum, H.; Arêde, A. Mainshock-aftershock damage assessment of infilled RC structures. Eng. Struct. 2018, 175, 645–660. [Google Scholar] [CrossRef]
- Shokrabadi, M.; Burton, H.V. Building service life economic loss assessment under sequential seismic events. Earthq. Eng. Struct. Dyn. 2018, 47, 1864–1881. [Google Scholar] [CrossRef]
- Shokrabadi, M.; Burton, H.V. Risk-based assessment of aftershock and mainshock-aftershock seismic performance of reinforced concrete frames. Struct. Saf. 2018, 73, 64–74. [Google Scholar] [CrossRef]
- Shokrabadi, M.; Burton, H.V. Regional short-term and long-term risk and loss assessment under sequential seismic events. Eng. Struct. 2019, 185, 366–376. [Google Scholar] [CrossRef]
- Wen, W.; Zhang, M.; Zhai, C.; Liu, W. Resilience loss factor for evaluation and design considering the effects of aftershocks. Soil Dyn. Earthq. Eng. 2019, 116, 43–49. [Google Scholar] [CrossRef]
- Demir, A.; Palanci, M.; Kayhan, A.H. Probabilistic assessment for spectrally matched real ground motion records on distinct soil profiles by simulation of sdof systems. Earthq. Struct. 2021, 21, 395. [Google Scholar]
- Demir, A.; Palanci, M.; Kayhan, A.H. Evaluation the effect of amplitude scaling of real ground motions on seismic demands accounting different structural characteristics and soil classes. Bull. Earthq. Eng. 2023, 1–29. [Google Scholar] [CrossRef]
- Rahnama, M.; Krawinkler, H. Effects of Soft Soil and Hysteresis Model on Seismic Demands; John, A., Ed.; Blume Earthquake Engineering Center: Stanford, CA, USA, 1993. [Google Scholar]
- Kunnath, S.K.; Reinhorn, A.M.; Lobo, R.F. IDARC Version 3.0: A Program for the Inelastic Damage Analysis of Reinforced Concrete Structures; Technical report no. NCEER-92-0022; National Center for Earthquake Engineering Research, State University of New York at Buffalo: Amherst, NY, USA, 1992. [Google Scholar]
- Cosenza, E.; Manfredi, G.; Ramasco, R. The use of damage functionals in earthquake engineering: A comparison between different methods. Earthq. Eng. Struct. Dyn. 1993, 22, 855–868. [Google Scholar] [CrossRef]
- Arias, A. Arias, A. A measure of Earthquake Intensity. In Seismic Design for Nuclear Power Plants; Hansen, R.J., Ed.; Massachusetts Institute of Technology Press: Cambridge, MA, USA, 1970; pp. 438–483. [Google Scholar]
- Park, Y.J.; Ang, A.H.S.; Wen, Y.K. Seismic damage analysis of reinforced concrete buildings. J. Struct. Eng. 1985, 111, 740–757. [Google Scholar] [CrossRef]
- Housner, G.W. Spectrum Intensities of Strong-Motion Earthquakes. In Earthquake and Blast Effects on Structures; Earthquake Engineering Research Institute: Los Angeles, CA, USA, 1952; pp. 20–36. [Google Scholar]
- Ancheta, T.D.; Darragh, R.B.; Stewart, J.P.; Seyhan, E.; Silva, W.J.; Chiou, B.S.J.; Wooddell, K.E.; Graves, R.W.; Kottke, A.R.; Boore, D.M.; et al. NGA-West2 database. Earthq. Spectra 2014, 30, 989–1005. [Google Scholar] [CrossRef]
- Chiou, B.; Darragh, R.; Gregor, N.; Silva, W. Nga project strong-motion database. Earthq. Spectra 2008, 24, 23–44. [Google Scholar] [CrossRef]
- Riddell, R. On ground motion intensity indices. Earthq. Spectra 2007, 23, 147–173. [Google Scholar] [CrossRef]
- Zhai, C.H.; Xie, L.L. A new approach of selecting real input ground motions for seismic design: The most unfavourable real seismic design ground motions. Earthq. Eng. Struct. Dyn. 2007, 36, 1009–1027. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, B.; Hu, J.; Yuan, C.; Wen, W.; Kong, Q. Permissible Scale Factors for Various Intensity Measures in Aftershock Ground Motion Scaling. Appl. Sci. 2023, 13, 12515. https://doi.org/10.3390/app132212515
Zhou B, Hu J, Yuan C, Wen W, Kong Q. Permissible Scale Factors for Various Intensity Measures in Aftershock Ground Motion Scaling. Applied Sciences. 2023; 13(22):12515. https://doi.org/10.3390/app132212515
Chicago/Turabian StyleZhou, Bochang, Jie Hu, Cheng Yuan, Weiping Wen, and Qingzhao Kong. 2023. "Permissible Scale Factors for Various Intensity Measures in Aftershock Ground Motion Scaling" Applied Sciences 13, no. 22: 12515. https://doi.org/10.3390/app132212515
APA StyleZhou, B., Hu, J., Yuan, C., Wen, W., & Kong, Q. (2023). Permissible Scale Factors for Various Intensity Measures in Aftershock Ground Motion Scaling. Applied Sciences, 13(22), 12515. https://doi.org/10.3390/app132212515